一种肘部和前臂矫形器
文献发布时间:2023-06-19 12:19:35
相关申请
本申请要求2018年10月15日提交的澳大利亚临时专利申请号为2018903897的澳大利亚临时专利申请的优先权,该申请的全部内容通过引用并入本文。
技术领域
本发明总体上涉及一种用于肘部、前臂和手腕的矫形装置,尤其涉及一种矫形装置,该矫形装置可简单而有效地用于对穿戴者的下臂区域施加各种矫正力,以便为穿戴者补偿或伸展丧失或受限的运动。
背景技术
前臂旋转,肘部屈曲和伸展运动,是将手部放置在空间的关键机能。任何一个或多个方向的运动受限,都会对人完成简单日常生活活动的能力以及他们参与社区和劳动的能力产生重大影响。
肘部、前臂或手腕的损伤,通常会丧失做一个或多个动作的运动能力,或做这些动作时动作僵硬。有证据表明,在这种情况下,为受影响的关节提供持续的拉伸,则随着时间的推移,可以改善这些部位的动作的幅度。
在其他情况下,受伤或外科康复方案,可能需要限制或协助一个或多个这些运动,以减少对愈合部位的压力。此外,受伤或残疾可能会限制某些方向上的运动。因此,需要有一种方法,来协助在这些特定方向上的运动。
许多矫形器已被开发出来,用于伸展或保护肘部、前臂和/或手腕这些部位,并取得了不同程度的成功。一些已经提出的矫形器依靠旋转(旋后和/或旋前)起作用,因此固定肘部是不可取的,因为这会使穿戴者的手臂出现不必要的僵硬和功能丧失。许多其他的已提出的矫形器,会覆盖穿戴者的手或有一个突出的轮廓,在穿戴者穿戴矫形器期间,它们会进一步阻碍这些机能的恢复或实施。此外,许多现有矫形器施加的力的强度有限,无法充分伸展或限制所需方向的运动。目前,尚未有一种已有的矫形器,可以同时通过控制肘部伸展以及旋后旋前的弧度,来控制或移动。
因此,需要提供一种改进矫形器,该矫形器可适用于多种用途,从而可用于协助在所需方向上的运动,并控制治疗部位上的任何不需要的力和运动,同时进一步使手部功能自由施展出来。
上述对先前参考文献或产品的引用和描述,并非旨在作为且不应解释为对本领域公知常识的陈述或承认。特别地,对以上现有技术的讨论,不涉及本领域技术人员普遍知道或公知的内容,而是帮助理解本发明的发明性步骤,其中相关的现有技术方案的识别,只是其中的一部分。
发明内容
因此,在本发明的一个方面,提供了一种矫形器,该矫形器包括:
第一部分,其适于固定到穿戴者的上臂区域;
第二部分,其通过铰接方式连接到第一部分,并且包括一对细长构件,该对细长构件间隔开来,使其沿穿戴者的下臂区域的相对侧延伸,每个细长构件终止于与穿戴者的手腕靠近的远端,并由连接器进行连接,该连接器至少部分地围绕该穿戴者手腕延伸;其中,细长构件的远端各具有形成在其中的连接器构件,该连接器构件用于协助与穿戴者手部的接合,从而使穿戴者手部保持在旋前或旋后的位置。在一个实施例中,在穿戴者手部的位置,包括腕戴构件,该腕戴构件具有从所述腕戴构件的相对侧延伸的一个或多个连接构件,用于与细长构件的连接器构件接合,以便在穿戴者处于放松状态时,将穿戴者手腕保持在旋前或旋后的位置。
腕戴构件可以是软矫形器。在另一个实施例中,腕戴构件可以是半刚性矫形器。在又一个实施例中,腕戴构件也可以是刚性矫形器。再一个实施例中,腕戴构件还可以是前臂腕带。
一个或多个连接构件可以是有弹性的。当穿戴者处于活动状态时,弹性连接构件允许穿戴者手腕沿相反方向移动,并且当穿戴者处于放松状态时,弹性连接构件允许穿戴者手腕返回到所需的旋前或旋后位置。
一个或多个连接构件可以是基本非弹性的或是绷紧弹性的。非弹性连接构件将穿戴者手腕保持在选定旋转度内,该选定旋转度包括仅旋后、仅旋前、受限旋后、受限旋前、或受限旋后和受限旋前两者。
腕戴构件可以是腕带,该腕带具有从其相对侧延伸的一个或多个弹性连接构件,用于与细长构件的连接器构件接合,以便在穿戴者放松时,将该穿戴者手腕保持在旋前或旋后位置。弹性连接构件允许手腕沿相反方向移动,以便在该穿戴者放松时,使手腕返回到所需的旋后或旋前位置。
腕戴构件可以是软腕带,该软腕带具有从其相对侧延伸的一个或多个非弹性或绷紧弹性连接构件,用于与细长构件的连接器元件接合,以便将穿戴者的手腕保持在选定的旋转度内。该选定旋转度包括仅旋后、仅旋前、受限旋后、受限旋前、或受限旋后和受限旋前两者。位于第一部分和第二部分之间的铰接连接允许细长构件在肘部屈曲和伸展平面内自由移动,从而允许腕带或矫形器在此平面内自由移动。
位于第一部分和第二部分之间的铰接连接可包括屈曲弹簧机构,用于对穿戴者肘部施加屈曲力,以保持穿戴者肘部处于屈曲状态,但是允许穿戴者抵抗屈曲力的而伸展他们的肘部。
位于第一部分和第二部分之间的铰接连接包括拉伸弹簧或弹性机构,用于对穿戴者肘部施加拉伸力,以保持穿戴者肘部处于伸展状态,但是允许穿戴者抵抗所述拉伸力的作用而屈曲肘部。
位于第一部分和第二部分之间的铰接连接包括一个或两个止动机构,用于限制穿戴者肘部的屈曲和/或伸展,从而保持穿戴者肘部的屈曲和/或伸展,同时允许所述的穿戴者肘部在一个或两个限制范围内移动。
铰接连接可以锁定在肘部屈曲或伸展的任何所需位置,以便将穿戴者的肘部锁定在所需位置。
附图说明
通过以下对优选实施例的非限制性描述,可以更好地理解本发明,其中:
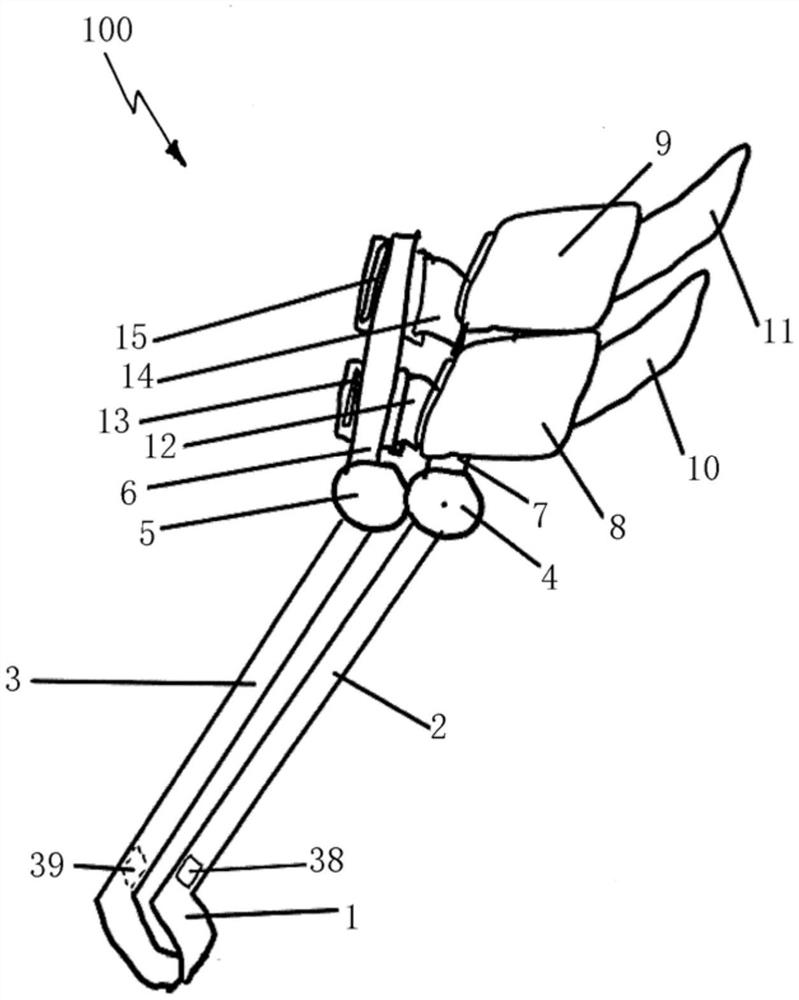
图1是根据本发明实施例的多用途肘部及前臂矫形器的近端构件的透视图;
图2是根据本发明实施例,与手腕矫形器一起使用的图1的矫形器的侧视图;
图3是图2的手腕矫形器的平面图;
图4是根据另一发明画出的多用途肘部及前臂矫形器的腕带的透视图;
图5是本发明的多用途肘部及前臂矫形器的侧视图,配置其为向穿戴者施加肘部动态屈曲和前臂动态旋后;
图6A和图6B是示出在肘部中段屈曲的矫形器的主视图,并且示出了如何使用矫形器的带来实现手部动态旋后;
图7是本发明的多用途肘部及前臂矫形器的侧视图,该矫形器用于实现肘部伸展限制和前臂动态旋后;
图8A、图8B和图8C是多用途肘部及前臂矫形器在肘部中度屈曲时的主视图,分别示出:旋前阻滞在0°;旋后运动阻滞在0°;旋前和旋后锁定在旋转范围中值处;
图9是本发明的多用途肘部及前臂矫形器的侧视图,该矫形器用于实现肘部动态屈曲和前臂动态旋后;
图10是本发明的多用途肘部及前臂矫形器的侧视图,该矫形器用于实现肘部动态屈曲和前臂动态旋前;
图11是本发明的多用途肘部及前臂矫形器的侧视图,该矫形器用于实现肘部动态伸展和前臂动态旋后;
图12是本发明的多用途肘部及前臂矫形器的侧视图,该矫形器通过肘部伸展模块和前臂动态旋后,来实现肘部动态屈曲。
具体实施方式
下面,将结合本发明的应用来描述本发明,而在该应用中,本发明用于控制和应用作用于个人右臂/手的运动。应当理解,矫形器可以应用于需要治疗的用户的任何手臂,而无需考虑用户性别或年龄。
参照图1,其示出了本发明的矫形器100。配置矫形器为佩戴在个人的上臂和下臂周围,并且矫形器包括上部和下部。上部总体上包括一对细长支撑构件6、7,细长支撑构件配置为沿穿戴者肱骨的任一侧延伸。细长支撑构件(或肱骨支腿)6、7各自在其下端连接到铰链铰接构件4、5,铰链铰接构件4、5的形状为圆盘型,能够绕圆盘中心轴移动。肱骨支腿6、7的上端是自由的,并通过在它们之间延伸的一对带12、14连接在一起。
为了便于将上部连接到上臂,本发明提供了连接带10、11,连接带10、11连接到肱骨支腿7的一个上边缘。连接带10、11上设有衬垫构件8、9,以接触穿戴者的手臂,从而使手臂表面的摩擦最小化,进而使穿戴者的舒适度最大化。另一个肱骨支腿6的上边缘具有建立在其上的环13、15,用于容纳连接带10、11,使连接带10、11能够固定在穿戴者的上臂周围。就此而言,可以将钩环紧固件的一部分,配置到连接带10、11的一个表面,例如尼龙搭扣(Velcro)
矫形器100的下部,通过一对细长支撑构件2、3,配置在用户的下臂部位,并围绕用户的下臂延伸。细长支撑构件(或前臂支腿)2、3安全地连接到相对的铰链铰接构件4、5上,并沿着穿戴者手臂的两侧延伸,以在穿戴者某个靠近手部、手腕或前臂远端的点处终止。连接器1刚性地连接前臂支腿2、3的远端,以确保前臂支腿保持对准穿戴者的前臂,并且为容纳穿戴者的手,连接器1配置为弯曲的形状。一对连接构件38、39设置在的每个前臂支腿2、3且紧靠连接器1的位置上,以便于安全地固定用户的手部,而固定方式将更详细地在下面描述。
在优选实施例中,前臂支腿2、3和肱骨支腿6、7由刚性材料(例如金属)构成。然而,还应理解,前臂支腿2、3和肱骨支腿6、7可由诸如金属或塑料,或由金属或塑料材料组成的组合材料等任何合适的刚性材料构成。前臂支腿2、3和肱骨支腿6、7连接至铰链铰接构件4、5的方式是:当连接时,肱骨支腿相对于前臂支腿的角度位置,可以围绕铰链铰接构件的中心轴变化,该中心轴基本上垂直于前臂支腿2、3和肱骨支腿6、7的纵轴延伸。
如图3和图4所示,为了将矫形器100与穿戴者结合,穿戴者还必须佩戴腕戴构件,例如手腕矫形器26或腕带23。
参照图3,手腕矫形器26包括管状材料片,该管状材料片具有用于容纳手指的第一孔和用于容纳穿戴者拇指的第二孔,使得手腕矫形器26延伸到穿戴者的手腕上方并向上延伸到穿戴者的手,如图所示。一对绳索27、28从手腕相对侧的手腕绷带延伸,每条绳索在连接构件29、30处终止。绳索27、28优选由弹性材料制成。连接构件29、30可以是钩环紧固构件,或者可以将它们配置成与凸轮锁装置接合,该凸轮锁装置形成于支腿上。
类似地,如图4所示,可以使用腕带23,其形状为具有拇指孔的包裹构件,该拇指孔用于接纳穿戴者拇指。然后,腕带23主体的其余部分包裹穿戴者手腕,并通过紧固件16(可以是钩环紧固件)固定在穿戴者手腕上。一对绳索18、19从手腕相对侧的腕带23处延伸,每条绳索18、19在连接部件20、21处终止。绳索18、19优选由弹性材料制成。如果绳索用于限制移动或将穿戴者锁定在旋后或旋前位置,绳索可由非弹性材料制成。在下面描述的这种实施例中,可以使用标号34、35来指代这种非弹性绳索。
虽然在上文描述中,手腕绷带26和腕带23是穿戴者为了与矫形器100结合,而佩戴的构件,但也可以出于同样的目的,使用另一只手或手腕或前臂佩戴的手腕绷带和腕带。前臂支腿2、3具有连接部件38、39,该连接部件有助于与手腕部件的绳索连接,例如手腕矫形器26或腕带23。这允许可以在旋转平面中向穿戴者施加动态、静态或其他力。
参照图2,其示出了结合到穿戴者上面的矫形器100的侧视图。穿戴者佩戴手腕矫形器26,手腕绷带的绳索27、28与前臂支腿2、3的紧固件28、29相连,使穿戴者的手腕处于旋后位置,手掌朝上。在这种姿势下,矫形器100为穿戴者提供自由的肘部屈曲、伸展以及前臂动态旋后这些运动。穿戴者可以旋前手腕,抵抗矫形器施加的动态旋后。
图5是在肘部动态屈曲和前臂动态旋后作用下的右臂的侧视图。如图所示,肘部动态屈曲,是通过添加穿过铰链铰接构件4、5的弹簧或弹性构件33来实现,该弹簧或弹性构件33沿箭头方向,向穿戴者的肘部施加偏置力。如前所述,通过将绳索27、28紧固到位于前臂支腿2、3末端的紧固件38、39上,前臂动态旋后即可实现。这是通过旋转穿戴者的手腕、使手部处于旋后方向,将绳索27、28绕过手腕并连接到相对的前臂支腿2、3上来实现的。松开近侧的手臂衬垫和连接带9和11,以示出近侧袖带可连接到穿戴者手臂的机构。如果要旋前而不是旋后,则旋转部件的方向是相反的(未显示)。要使左臂旋后,绳索27、28的旋转部件将以镜像方向连接。如果是伸展肘部,弹簧或弹性构件33的动作是相反的。
参照图6A和图6B,它们示出了肘部处于中度屈曲时,手臂的冠状平面图,其中弹性绳索27、28将手腕绷带26或腕带23置于前臂支腿2、3和支腿连接1之间的中心位置。如图6B所示,弹性绳索27、28将穿戴者拉入旋后位置。但是,它们可能会极大地阻碍旋前,如图6A所示。如图5所示,绳索17、18配置为实现动态旋后的模式。如果将绳索17、18颠倒,则矫正器将实现动态旋前。
图7是限制伸展37和屈曲32的肘部阻滞机构的侧视图,该肘部阻滞机构可与本发明的矫形器100一起使用,以协助实现肘部伸展限制和前臂动态旋后。这种装置能够与铰链铰接构件4,5结合,以改变其功能。
参考图8A至图8C,其示出了肘部中度屈曲时,矫形器的冠状平面图,该矫形器具有旋转阻滞部件。在图8A中,可以通过使用非弹性或绷紧弹性绳索34和35来阻断旋前,该绳索是在旋后方向上缠绕的。在图8B中,可通过使用非弹性或绷紧弹性部件34和35来阻断旋后,该部件是在旋前方向上缠绕的。在图8C中,可以通过使用非弹性或绷紧弹性部件34x2和35x2来阻断旋后和旋前,该部件是在两个旋转方向上缠绕的。
从以上描述中,可以理解,可通过简单地调整本发明的矫形器,以向穿戴者提供各种不同的治疗选择。可以通过简单地调整铰链铰接构件4、5,以提供可能需要的肘部屈曲或伸展,并且可以在铰链铰接构件4、5上放置限制器,以限制肘部可能的移动的程度。同样地,根据所需的治疗方法,弹性和非弹性绳索也可用于保持手的旋后或旋前姿势。这种矫形器对那些需要矫正治疗以疗伤和/或进行恢复运动的人大有裨益。
在这方面,图9示出了如何在铰链铰接构件4、5中放置屈曲机构33,以及如何使用弹性绳索27、28将穿戴者的手部固定在旋后位置,使得能够通过简单地调整矫形器,以提供肘部动态屈曲和前臂动态旋后。类似地,图10示出了如何在铰链铰接构件4、5中放置屈曲机构33,以及如何使用弹性绳索27、28将穿戴者的手部固定在旋前位置、使得能够通过简单地调整矫形器,以提供肘部动态屈曲和前臂动态旋前。图11示出了如何在铰链铰接构件4、5中放置为肘部伸展提供偏置力伸展机构36,以及如何使用弹性绳索27、28将穿戴者的手固定于旋后位置,使得能够通过简单地调整矫形器,就能提供肘部动态伸展和前臂动态旋后。
本发明的矫形器提供细长构件,该细长构件与前臂平行,能够与手腕随动、做手腕所做的动作;能够提供用于将旋转运动应用于手腕的杠杆。在远端尺桡关节附近的水平面上,通过连接器使细长构件的远端稳定。矫形器的第一部分和第二部分之间的铰接连接可使细长构件跟随手腕一起运动,而不管肘部位置如何。如果调整其长度为不超过手部,它也不限制手部的运动。外部旋转力可以通过弹性或非弹性部件来实现,这些部件将支腿连接到手腕或前臂。当这些部件沿同一方向工作时,手腕居中于加长构件,支腿也相应地跟随。加长的连接件防止前臂支腿与手腕一起旋转。通过保持低姿态和接近手腕,细长构件和连接器不会限制抓握、捏运动或手部运动。如果需要手腕屈曲、伸展或挥动,可以安装允许屈曲、伸展或挥动的腕带,而不是手腕绷带。
此外,通过与前臂保持平行,细长构件通过用于栓系手腕的弹性或非弹性绳索产生扭矩。这为拉伸、协助或阻滞旋转运动提供了有效的扭转力臂。此外,通过选择柔软或有弹性的绳索或系带,穿戴者可以根据需要,向与力相反的方向运动,以执行功能性任务。
在主动、动态或阻滞实施例中,允许穿戴者在其期望的运动范围内,控制或移动肘部。如果需要,还可以向肘部添加动态部件,该部件可以同时拉伸僵硬的肘部或帮助虚弱的肘部伸展和/或屈曲。因此,通过简单的调整,本发明的矫形器能够同时控制或移动肘部的屈曲和伸展、旋后和旋前弧度。根据本发明的矫形器在保持手臂作为用于旋转的强大近端杠杆的同时,兼顾了肘部灵活性或肘部的控制。
在整个说明书和权利要求书中,“包括”一词及其派生词的含义是包含性的,而不是排他性的,除非另有明确规定或上下文另有要求。也就是说,“包括”一词及其派生词将被视为不仅包括其直接引用的列出的部件、步骤或特征,而且还包括未具体列出的其他部件、步骤或特征,除非另有明确说明或上下文另有要求。
说明书和权利要求书中使用的方向性术语,例如垂直,水平,顶部,底部,上部和下部,应解释为带有关联性的,并且其前提是通常会考虑部件,对象,物品,设备,装置或仪器在特定的方向上,典型的是矫形器在最上面。
本领域技术人员应当理解,在不脱离本发明的精神和范围的情况下,可以对本文所描述的本发明的方法进行多种修改和变形。
- 一种肘部和前臂矫形器
- 一种减少震颤幅度的前臂矫形器