压力控制系统及控制方法
文献发布时间:2023-06-19 13:45:04
技术领域
本申请涉及压力控制系统领域,具体涉及压力控制系统及压力控制系统的控制方法。
背景技术
在半导体制作工艺中,晶圆在刻蚀设备上的传输时,会经由装载腔室(Loadlock),装载腔室存在真空状态与大气状态,并根据晶圆传输的需求,调整装载腔室的状态。装载腔室的工作流程基本为:大气状态下,打开大气侧门阀,大气机械手将晶圆取出或放入,关闭大气侧门阀,装载腔室由大气抽至真空状态,打开真空侧门阀,真空机械手将晶圆取出或放入,关闭真空侧门阀,装载腔室由真空充至大气状态,如此往复。
现有技术中,装载腔室在充气过程中,很容易发生异常,造成机台停运,并且充气过程中,存在气体波动问题,影响机台的产能以及稼动率。
发明内容
鉴于此,本申请提供一种压力控制系统及压力控制系统的控制方法,能够降低装载腔室发生异常的几率,提升机台的产能以及稼动率。
这里所述的稼动率指,的是设备无报警的有效运行时间占设备总运行时间的比值,当设备因报警故障中断正常运行时间越长,此数值越小,会影响产能。
本申请提供了一种压力控制系统,包括:装载腔室;压力检测装置,所述压力检测装置的检测端设于所述装载腔室内,用于检测所述装载腔室内的气压,获取检测气压;气流组件,连通至所述装载腔室,用于向所述装载腔室内提供目标气体,所述气流组件包括:连接管路,用于连通气体源及所述装载腔室;流量控制装置,设于所述连接管路上,用于控制和监测流入至所述装载腔室的目标气体的流速;控制器,所述控制器连接至所述流量控制装置及所述压力检测装置,用于在目标气压与所述检测气压的差值大于预设气压值时,根据所述检测气压及所述目标气压向所述流量控制装置输出第一控制指令,以控制经所述流量控制装置调节所述装载腔室内的气压至所述目标气压。
可选的,所述气流组件还包括:通断阀,连接至所述控制器,设于所述连接管路上,并位于所述流量控制装置与所述装载腔室之间的连接管路区段;所述控制器还输出第二控制指令至所述通断阀,所述通断阀根据所述第二控制指令切换通断状态,从而控制所述流量控制装置与装载腔室之间的连接管路区段的通断。
可选的,所述控制器输出的第一控制指令包括:在所述装载腔室的检测气压小于第一气压时,控制所述流量控制装置以恒定流速向所述装载腔室内提供目标气体;在所述装载腔室的检测气压大于或者等于所述第一气压时,控制所述流量控制装置以变动流速向所述装载腔室内提供目标气体,调节所述装载腔室内的气压至所述目标气压;所述变动流速的初始值大于所述恒定流速。
可选的,根据所述装载腔室的容积、所述装载腔室内的初始检测气压及充气期望用时,获取所述恒定流速,且所述恒定流速可根据以下等式得出:
Q
其中Q
在控制所述流量控制装置以变动流速向所述装载腔室内提供目标气体时,所述控制器基于比例-微分-积分法,根据所述目标气压和检测气压之间的差值控制所述变动流速的大小,且所述变动流速的大小与所述差值的大小成反比。
可选的,所述气流组件还包括平衡阀,所述平衡阀的一端连通至所述装载腔室,所述平衡阀的另一端连接至外界,所述控制器用于输出第三控制指令至所述平衡阀;所述控制器输出的第三控制指令包括:在所述检测气压大于或等于所述目标气压与所述预设气压值的差值时,控制所述气流组件停止向所述装载腔室内提供目标气体,并控制所述平衡阀打开预设时长,调节所述装载腔室内的气压至所述目标气压。
可选的,在控制所述流量控制装置以变动流速向所述装载腔室内提供目标气体时,所述控制器基于比例-微分-积分法,根据所述目标气压和检测气压之间的差值控制所述变动流速的大小,且所述变动流速的大小与所述差值的大小成反比。
本申请还提供了一种压力控制系统的控制方法,所述压力控制系统包括装载腔室,包括以下步骤:检测所述装载腔室内的气压,获取检测气压;通过单一管路向所述装载腔室内通入目标气体,在目标气压与所述检测气压的差值大于预设气压值时,根据所述检测气压及所述目标气压调节所述装载腔室内的气压至所述目标气压。
可选的,所述根据所述检测气压及所述目标气压调节所述装载腔室内的气压至所述目标气压,包括:在所述检测气压小于第一气压时,以恒定流速向所述装载腔室内提供所述目标气体;在所述装载腔室的检测气压大于或者等于所述第一气压时,以变动流速向所述装载腔室内提供目标气体,调节所述装载腔室内的气压至所述目标气压;所述变动流速的初始值大于所述恒定流速。
可选的,根据所述装载腔室的容积、装载腔室内的初始检测气压及充气期望用时获取所述恒定流速,且所述恒定流速可根据以下等式得出:
Q
其中Q
可选的,在所述检测气压大于或等于所述目标气压与所述预设气压值的差值时,停止向所述装载腔室内提供所述目标气体,并控制所述装载腔室与大气环境连通预设时长,以调节所述装载腔室内的气压至所述目标气压。
可选的,基于比例-微分-积分法,并根据所述目标气压和检测气压之间的差值控制所述变动流速的大小,且所述变动流速的大小与所述差值的大小成反比。
本申请的压力控制系统及压力控制系统的控制方法在更改所述目标气体的流速时,可以通过所述流量控制装置直接控制所述目标气体的流速,无需进行粗细管道的切换,因此减小了切换气体管道导致的气体流速波动发生的几率,从而减小了气体流速波动过大导致晶圆毁损的几率。
并且,只有当目标气压与检测气压的差值大于所述预设气压值后,所述流量控制装置才根据所述控制器发出的第一控制指令,根据所述目标气压及检测气压的具体值,来控制所述目标气体流入至所述腔室内时的流速,因此,可以减小因装载腔室内轻微的气流波动导致的充气流程的发生几率,提高机台产能。
并且,由于设置流量控制装置,不管所述气体源提供所述目标气体时的动力源的配置参数如何,所述目标气体流入至所述腔室内时的流速都可以由所述流量控制装置进行二次流速控制管理,缓解了现有技术中仅由所述气体源的动力源配置参数及通断阀的通断来控制流速时,所述气体源的单套动力源配置参数流速不能适应不同目标气压的问题。减少了动力条件、运行环境对设备的影响,降低腔室在进行充气动作时的报警频率,提升设备产能,提高设备稼动率。
并且,由于不再仅依赖所述气体源的配置参数来控制流速,无需通过调整气体源的配置参数来适配所需的目标气压,避免了调整气体源的配置参数来控制流速时气体流速不稳的问题,进一步的提高了向腔室内提供目标气体时的流速稳定性,也进一步的降低因气体流速变换波动而造成的机台宕机、晶圆毁损的几率,提高机台的产能和稼动率。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为现有技术中的装载腔室的充气流程示意图。
图2为现有技术中的装载腔室及其充气组件的结构示意图。
图3为本申请一实施例中所述压力控制系统的结构示意图。
图4为本申请一实施例中所述压力控制系统的结构示意图。
图5为本申请一实施例中所述压力控制系统的控制方法的步骤流程示意图。
图6为本申请一实施例中所述压力控制系统的控制方法的步骤流程示意图。
具体实施方式
研究发现,发生上述问题的主要原因在于现有技术中使用的给装载腔室使用的充气设备结构。
具体的,现有机台的装载腔室在充气时所充气体一般为氮气(N
图2为装载腔室100的充气气路原理图,通过慢充阀1072和快充阀1071来切换第一连接管路1061及第二连接管路1062的导通情况,从而实现对充气速度快慢的调节。第一连接管路1061的内径大于第二连接管路1062的内径,因此经由第一连接管路1061流入至装载腔室100的氮气其流速更大,经由第二连接管路1062流入至装载腔室100的氮气其流速更小。
控制器103通过真空压力检测装置获取装载腔室100内的检测气压,从而决定控制慢充阀1072和快充阀1071的开断的时间,来实现装载腔室100的充气速度调节。
在装载腔室100的充气过程中,通过切换第一连接管路1061和第二连接管路1062的切换瞬间,装载腔室100内的压力有瞬间的峰值波动,很容易造成控制系统对压力的错误判断,进而中断机台运行。
并且,在图2所示的现有技术中,在对装载腔室进行充气时,慢充阀1072和快充阀1071采用的是气动阀,动力源仅为压缩空气(CDA),这种仅通过动力源的配置参数来决定气体流速的单一固定的充气动力提供方式,会使得装载腔室100在充气过程中极易受到动力条件的影响,当所充氮气气源压力不足或过大时,会使得装载腔室100达不到或远大于目标气压,导致机台运行中止。
为了解决上述问题,以下提出了一种压力控制系统及压力控制系统的控制方法,以降低装载腔室发生异常的几率,提升机台的产能以及稼动率。
以下结合附图及实施例,对压力控制系统及压力控制系统的控制方法进一步的说明。
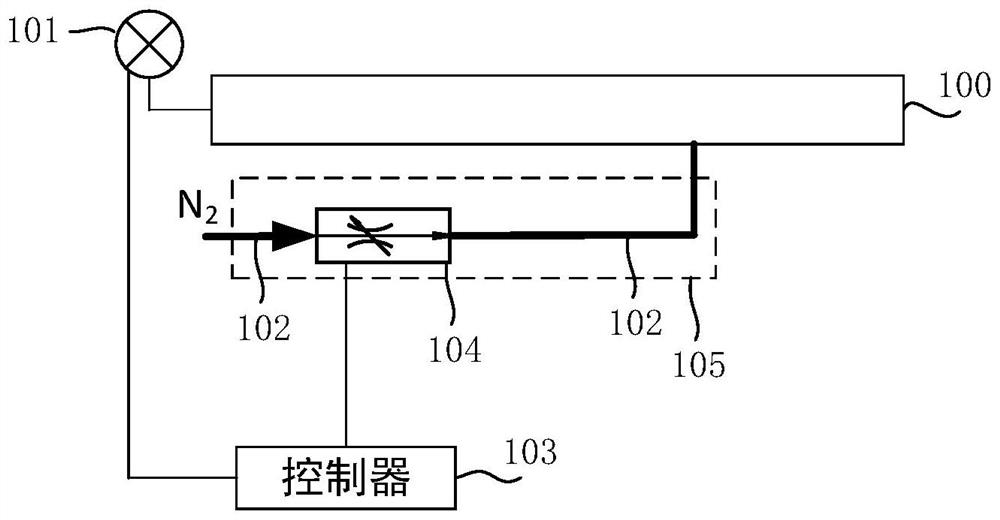
请参阅图3,为本申请一实施例中压力控制系统的结构示意图。
在该实施例中,压力控制系统包括装载腔室100、压力检测装置101、气流组件105及控制器103。
装载腔室100用于晶圆传输。由于晶圆对装载腔室100内的气体环境具有一定的要求,因此,可以通过气流组件105,对装载腔室100内的气体环境进行调整控制。
在一些实施例中,装载腔室100内的初始气压为0,为抽真空状态。晶圆由工艺腔室完成工艺后,会通过装载腔室运输到大气环境中进行存储,为了晶圆正常传输,需要在真空状态下,通过机械手将工艺腔室中的晶圆传输至装载腔室内,然后将装载腔室的气体调整为外界大气环境的气压,进而将晶圆从装载腔室传输至大气环境中。在该实施例中,需要将装载腔室中的气压充至与外界大气环境的气压相近,以满足后续的晶圆传输的需求。
压力检测装置101的检测端设于装载腔室100,用于检测装载腔室100内的气压。压力检测装置101是用于测量流体压力的仪器。压力检测装置101通常是将被测压力与某个参考压力,如大气压力或其他给定压力,进行比较,测得的相对压力或气压差。
压力检测装置101包括液柱式压力计、弹性式压力计和压电传感器式压力计中的至少一种。本领域的技术人员可以根据需要选择所需的压力检测装置101。选择不同的压力检测装置101时,压力检测装置101的检测端不同。如压电式传感器压力计中,检测端指的是的压电式传感器的检测芯片的检测面。
气流组件105连通至装载腔室100,用于向装载腔室100内提供目标气体,气流组件105包括:连接管路102,用于连通气体源及装载腔室100;流量控制装置104,设于连接管路102上,用于控制和监测流入至装载腔室100的目标气体的流速。
连接管路102包括塑胶管路、金属管路中的至少一种,并且优选为管壁内部无焊缝的连接管路102。可根据目标气体决定连接管路102的制备材料。在一些实施例中,目标气体的性质较为稳定,包括惰性气体等,此时,连接管路102的材料选择范围较广。在一些实施例中,目标气体的性质较为活泼,如酸性气体等,连接管路102的内壁可以选择性的涂覆有难以与该目标气体反应的涂层,涂层包括陶瓷涂层等。
并且,用于装载目标气体的气体源的容器也优选为由性质稳定、难以与目标气体反应的材料制备。容器包括塑胶容器、金属容器及内部涂覆有陶瓷涂层的金属容器等中的至少一种。并且,气体源优选为能够通过修改配置参数,来调节气体源输出的目标气体的流速的气体源。
流量控制装置104设于连接管路102上,用于控制和监测流入至装载腔室100的目标气体的流速。流量控制装置104是指示被测流量和(或)在选定的时间间隔内流体总量的仪表,可以用于测量及控制管道或明渠中流体流量。流量控制装置104为质量流量控制器,可检测和控制流器的流速。
压力控制系统还包括控制器103,控制器103连接至流量控制装置104及压力检测装置101,用于在目标气压与检测气压的差值大于预设气压值时,根据检测气压及目标气压向流量控制装置104输出第一控制指令,以控制流量控制装置调节装载腔室内的气压至目标气压。
在第一控制指令下达前,首先需要判断目标气压与检测气压的关系,若目标气压与检测气压的差值小于或等于预设气压值,则证明装载腔室本身的气压状况与所需的气压状况相近或相同,直接结束充气即可,提升设备产能。
在一些实施例中,预设气压值为0至7torr。当预设气压值等于0时,只要检测气压没有达到目标气压,就会触发控制器103发出第一控制指令,对装载腔室100进行充气控制。实际上,也可根据需要设置预设气压值的大小。
控制器103包括可编程逻辑器件、单片机及微控制器等中的至少一种。本领域的技术人员可以根据需要选择控制器103的具体结构。
在该实施例中,更改目标气体的流速时,可以通过流量控制装置104直接控制目标气体的流速,无需进行粗细管道的切换来改变气体流速,因此减小了切换气体管道导致的气体流速波动发生的几率,从而减小了因气体流速波动过大导致机台宕机、晶圆毁损的几率,在对装载腔室100进行充气时,能够快速平稳的达到目标气压。
并且,只有当目标气压与检测气压的差值大于预设气压值后,流量控制装置104才根据控制器103发出的第一控制指令,根据目标气压及检测气压的具体值来控制目标气体流入至装载腔室100内时的流速,因此,可以减小因装载腔室内轻微的气流波动导致的充气流程的发生几率,提高机台产能。
并且,由于设置流量控制装置104,不管气体源提供目标气体时动力源的配置参数如何,目标气体流入至装载腔室100内时的流速都可以由流量控制装置104进行二次流速控制管理,缓解了现有技术中仅由气体源的动力源配置参数来控制流速时,气体源的单套动力源配置参数对应的气体流速不能适应不同目标气压的问题,减少了动力条件、运行环境对设备的影响,降低腔室在进行充气动作时的报警频率,提升设备产能,提高设备稼动率。
并且,由于不再仅依赖气体源的动力源配置参数来控制流速,无需通过调整气体源的动力源配置参数来适配所需的目标气压,避免了调整气体源的动力源配置参数来控制流速时气体流速不稳的问题,进一步的提高了向装载腔室100内提供目标气体时的流速稳定性,也进一步的降低因气体流速变换波动而造成的机台宕机、晶圆毁损的几率,提高机台的产能和稼动率。
请参阅图4,为一实施例中压力控制系统的结构示意图。
在该实施例中,气流组件105还包括通断阀201,通断阀201包括电磁阀,连接至控制器103,且通断阀201设于连接管路102上,并位于流量控制装置104与装载腔室100之间的连接管路102区段,控制器103还输出第二控制指令至通断阀201,通断阀201根据第二控制指令切换通断状态,从而控制流量控制装置104与装载腔室100之间的连接管路区段的通断。
流量控制装置104虽然对目标气体的流速有一定的管理作用,可以通过控制流量控制装置104的流速为0,来关断气体源与装载腔室100之间的连接管路102。但由于流量控制装置104的关断作用有限,即使将流量控制装置104的流速设置为0,仍然有部分目标气体通过流量控制装置104流入至装载腔室100。因此,在该实施例中,通过设置通断阀201,来彻底关断流量控制装置104与装载腔室100之间的连接管路102区段,从而防止额外的目标气体流入至装载腔室100。
在该实施例中,气流组件105还包括输入输出设备,连接至控制器103,输入输出设备用于配置目标气压,并将目标气压输出至控制器。目标气压可以根据需要进行设置。一般而言,可以将目标气压的值设置成与外界大气压相近,并大于外界大气压的值。
输入输出设备包括但限于:键盘、触摸屏、语音识别装置等。本领域的技术人员可以根据需要设置输入输出设备,并不以列举的上述具体结构为限。
控制器103输出的第一控制指令至少包括:在装载腔室100的检测气压小于第一气压时,控制气流组件105的流量控制装置工作在恒定流速阶段,恒定流速阶段时,流量控制装置105以恒定流速向装载腔室100内提供目标气体。
在该阶段下,恒定流速可以足够小,以适用一些具体的装载腔室100要求。例如,装载腔室中通常需要在初始使用阶段,以低流速的方式向装载腔室内通入氮气。此时,氮气的流速通常在100sccm左右,以减小氮气流入装载腔室的流速过大,造成装载腔室内的晶圆发生毁损的可能性。
一般而言,在恒定流速阶段向装载腔室100内充入目标气体时,需要在充气期望用时内使装载腔室100内的气压能够达到一定的值。因此,可以根据充气期望用时、装载腔室100的大小、第一气压及装载腔室100内的初始检测气压,来决定恒定流速阶段对应的恒定流速。
具体的,基于下式获取恒定流速:
Q
其中Q
随着充气的进行,在装载腔室100的检测气压大于或等于第一气压时,控制气流组件105的流量控制装置以变动流速向装载腔室100内提供目标气体;变动流速的初始值大于恒定流速。
由于变动流速的初始值大于恒定流速,因此在装载腔室100的检测气压刚刚增大至大于第一气压,气流组件105对装载腔室100进行充气的充气速度加快,能够缩小装载腔室100达到目标气压所需的时长。
并且,在控制流量控制装置以变动流速向腔室内提供目标气体时,目标气体的流速能够随着检测气压改变,以适应实时的气压需求。在一些实施例中,提供控制器103能够使用的对照表,对照表中包含每一检测气压对应的目标气体的流速,或者提供控制器103能够使用的控制程序,该控制程序可针对每一检测气压,基于内置的关系式或算法,实时输出期望的流速,并将该包含期望的流速的指令给到流量控制装置104,从而通过流量控制装置104控制目标气体的流速。
在该实施例中,在控制流量控制装置以变动流速向腔室内提供目标气体时,控制器103基于比例-微分-积分法,根据目标气压和检测气压之间的差值控制变动流速的大小,且变动流速的大小与差值的大小成反比,从而使得通入至装载腔室100的目标气体的流速始终平缓,并且能够在保证足够的充气速度的同时,减小装载腔室100内出现气压扰动的可能性。
比例-微分-积分法简称PID(proportional-integral-derivative control)控制,算法简单、鲁棒性好,可靠性高,能够根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
在该实施例中,基于比例-微分-积分法的控制器103,其给定值包括目标气压,实际输出值包括检测气压。
在一些实施例中,目标气压与外界气压相同。在装载腔室100的内外存在预设范围内的气压差时,可以连通装载腔室100与外界,以减小或平衡装载腔室100的气压与外界的气压,使装载腔室100与外界之间的气压相对平衡。
因此,在该实施例中,气流组件105还包括:平衡阀202,连接至控制器103,一端连通至装载腔室100,一端连接至外界,控制器103输出第三控制指令至平衡阀202,平衡阀202根据第三控制指令打开,连通外界与装载腔室100,从而调整装载腔室100内与外界大气环境的气压差。
在一种实施例中,控制器103输出的第三控制指令包括:在检测气压大于或等于目标气压与预设气压值的差值时,控制气流组件105停止向装载腔室100内提供目标气体,并控制平衡阀202打开预设时长,以调节装载腔室内的气压至目标气压。
在这些实施例中,由于配置了通断阀201,可以彻底关断装载腔室100与气流组件105的连接管路102,防止多余的气体充入至装载腔室100,造成装载腔室100内的实际的检测气压与目标气压有出入。并且,由于配置了平衡阀202,因此,装载腔室100内的检测气压与目标气压相同或相近后,保持装载腔室100内环境与外界大气的环境的气压平衡。
本申请的实施例中还包括一种压力控制系统的控制方法。
请参阅图3、图4以及图5,其中图5为一实施例中压力控制系统的控制方法的步骤流程示意图。
在该实施例中,压力控制系统包括腔室,压力控制系统的控制方法包括以下步骤:
步骤S501:检测装载腔室100内的气压,获取检测气压。
装载腔室100用于放置晶圆,由于晶圆对装载腔室100内的气体环境具有一定的要求,因此,可以通过气流组件105,对装载腔室100内的气体环境进行调整控制。
在一些实施例中,装载腔室100内的初始气压为0,为抽真空状态。例如装载腔室等。在由气流组件105向装载腔室内充入氮气前,装载腔室内放入了待进行后续处理的晶圆,并且对装载腔室进行了抽真空处理。在该实施例中,需要将装载腔室中的气压充至与外界大气环境的气压相近,并稍大于外界大气环境的气压,以满足后续的晶圆处理需求。
在图3至图4所示的实施例中,可以通过压力检测装置101检测装载腔室100内的气压。压力检测装置101的检测端设于装载腔室100,用于检测装载腔室100内的气压。压力检测装置101是用于测量流体压力的仪器。压力检测装置101通常是将被测压力与某个参考压力,如大气压力或其他给定压力,进行比较,测得的相对压力或气压差。
压力检测装置101包括液柱式压力检测装置、弹性式压力检测装置和压电传感器式压力检测装置中的至少一种。本领域的技术人员可以根据需要选择所需的压力检测装置101。
步骤S502:通过单一管路向装载腔室100内通入目标气体,在目标气压与检测气压的差值大于预设气压值时,根据检测气压及目标气压调节目标气体的流速。
在图3至图4所示的实施例中,通过气流组件105向装载腔室100内通入目标气体。气流组件105连通至装载腔室100,用于向装载腔室100内提供目标气体,气流组件105包括:连接管路102,用于连通气体源及装载腔室100;流量控制装置104,设于连接管路102上,用于控制和监测流入至装载腔室100的目标气体的流速。
连接管路102包括塑胶管路、金属管路中的至少一种,并且优选为管壁内部无焊缝的连接管路102。可根据目标气体决定连接管路102的制备材料。在一些实施例中,目标气体的性质较为稳定,包括惰性气体等,此时,连接管路102的材料选择范围较广。在一些实施例中,目标气体的性质较为活泼,如酸性气体等,连接管路102的内壁可以选择性的涂覆有难以与该目标气体反应的涂层,涂层包括陶瓷涂层等。
并且,用于装载目标气体的气体源的容器也优选为由性质稳定、难以与目标气体反应的材料制备。容器包括塑胶容器、金属容器及内部涂覆有陶瓷涂层的金属容器等中的至少一种。
流量控制装置104设于连接管路102上,用于控制和监测流入至装载腔室100的目标气体的流速。流量控制装置104是指示被测流量和(或)在选定的时间间隔内流体总量的仪表,可以用于测量及控制管道或明渠中流体流量。流量控制装置104包括质量流量控制器,可检测和控制流器的流速。
在该实施例中,更改目标气体的流速时,可以通过流量控制装置104直接控制目标气体的流速,无需进行粗细管道的切换,因此减小了切换气体管道导致的气体流速波动发生的几率,从而减小了气体流速波动过大导致晶圆毁损的几率。
并且,由于根据目标气压及检测气压的具体值,来控制目标气体流入至装载腔室100内时的流速,因此即使更改了目标气压,也无需通过调整气体源提供目标气体时的配置参数来调整流速。不管气体源提供目标气体时的配置参数如何,目标气体流入至装载腔室100内时的流速都可以由流量控制装置104进行二次控制管理,缓解了现有技术中仅由气体源的配置参数及通断阀201的通断来控制流速时,气体源的单套配置参数流速不能适应不同目标气压的问题。
并且,由于不再仅依赖气体源的动力源配置参数来控制流速,无需通过调整气体源的动力源配置参数来适配所需的目标气压,避免了调整气体源的动力源配置参数来控制流速时气体流速不稳的问题,进一步的提高了向装载腔室100内提供目标气体时的流速稳定性,也进一步的降低因气体流速变换波动而造成的机台宕机、晶圆毁损的几率,提高机台的稼动率。
在一种实施例中,根据检测气压及目标气压调节目标气体的流速时,至少包括以下步骤:在检测气压小于第一气压时,通过流量控制装置104以恒定流速向装载腔室100内提供目标气体。
在该阶段下,恒定流速可以足够小,以适用一些具体的装载腔室100要求。例如,装载腔室中通常需要在初始使用阶段,以低流速的方式向装载腔室内通入氮气。此时,氮气的流速通常在100sccm左右,以减小氮气流入装载腔室的流速过大,造成装载腔室内的晶圆发生毁损的可能性。
一般而言,在恒定流速阶段向装载腔室100内充入目标气体时,需要在充气期望用时内使装载腔室100内的气压能够达到一定的值。因此,可以根据充气期望用时、装载腔室100的大小、第一气压及装载腔室100内的初始检测气压,来决定恒定流速阶段对应的恒定流速。
具体的,基于下式获取恒定流速:
Q
其中Q
随着充气的进行,向装载腔室100内通入目标气体时,至少包括以下步骤:在检测气压大于或者等于第一气压时,通过流量控制装置104以变动流速向装载腔室100内提供目标气体,变动流速的初始值大于恒定流速。
变动流速的初始值大于恒定流速,因此在检测气压刚增大至大于第一气压时,气流组件105对装载腔室100进行充气的充气速度加快,能够缩小装载腔室100达到目标气压所需的时长。
并且,在气流组件以变动流速提供目标气体时,目标气体的流速能够随着检测气压改变,以适应实时的气压需求。在一些实施例中,提供控制器103能够使用的对照表,对照表中包含每一检测气压对应的目标气体的流速,或者提供控制器103能够使用的控制程序,该控制程序可针对每一检测气压,基于内置的关系式或算法,实时输出期望的流速,并将该包含期望的流速的指令给到流量控制装置104,从而通过流量控制装置104控制目标气体的流速。
在该实施例中,在气流组件以变动流速提供目标气体时,控制器103基于比例-微分-积分法,根据目标气压和检测气压之间的差值控制变动流速的大小,且变动流速的大小与差值的大小成反比,从而使得通入至装载腔室100的目标气体的流速始终平缓,并且能够在保证足够的充气速度的同时,减小装载腔室100内出现气压扰动的可能性。
比例-微分-积分法简称PID(proportional-integral-derivative control)控制,算法简单、鲁棒性好,可靠性高,能够根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
在该实施例中,基于比例-微分-积分法的控制器103,其给定值包括目标气压,实际输出值包括检测气压。
在一些实施例中,目标气压与外界的大气环境气压相同。在装载腔室100内与外界大气环境之间存在预设范围内的气压差时,可以打开设置在装载腔室100与外界之间的连接管路102上的平衡阀202,连通装载腔室100与外界,从而减小或平衡外界与装载腔室100内的气压差,使装载腔室100与外界之间的气压相对平衡。
在该实施例中,在检测气压大于或等于目标气压与预设气压值的差值时,停止向装载腔室100内提供目标气体,并控制装载腔室100与外界大气环境连通预设时长,以控制腔室内与外界大气环境气压差。
以下结合一些应用过程中使用的实际数据,对图4所示的实施例中的压力控制系统及其控制方法进行进一步的说明。
图4所示的实施例中的压力控制系统可以用于装载腔室快速充气的动态控制。压力控制系统包括:装载腔室100、流量控制装置104、通断阀201、平衡阀202、压力检测装置101、连接管路102、控制器103。
在该实施例中,连接管路102的内径在6mm-7mm的范围内,并连通至传输系统的氮气主管路,或从传输系统的氮气主管路上分出。流量控制装置104能够用于控制并测量氮气的流量。连接管路102连通流量控制装置104的气体入口,再从流量控制装置104气体出口连通至通断阀201,再从通断阀201连通至装载腔室。
压力检测装置101为真空压力计,直接安装在装载腔室上。控制器103分别与真空压力计的通讯接口、通断阀201的控制接口及平衡阀202控制接口相连,实现装载腔室检测气压监控和通断阀201、平衡阀202的控制。
本申请的实施例中,通过真空压力计实时检测装载腔室的检测气压P
具体的,将检测气压从真空到大气的划分为三个区间,分别为:P
在检测到目标气压与检测气压的差值大于预设气压值时,开始对装载腔室进行充气。并且,充气策略跟随检测气压与目标气压的大小关系的变化而变化。
当检测气压P
在一些实施例中,充气期望用时一般为2s至4s,慢速的充气速度可避免由于压力上升过快而导致装载腔室100环境扰动。
当P
在该实施例中,以P
当P
可以根据需要设置预设气压值。如设置成0torr。在该实施例中,预设气压值为5torr。在目标气压与外界的大气压相等时,若检测气压将要达到外界的大气压,却仍未达到外界的大气压时,打开平衡阀202,连通装载腔室100以及外界大气环境,从而调整装载腔室内的气压,使装载腔室内的气压趋向外界的大气压,即趋向目标气压。例如,在P
请参阅图6,为一实施例中压力控制系统的控制方法的步骤流程示意图。
在该实施例中,通过控制器103预设第一气压P
装载腔室开始充气流程后,包括以下步骤:
步骤S601:判断目标气压与检测气压P
步骤S602:打开通断阀201,并进入步骤S603;
步骤S603:判断检测气压P
步骤S604:慢充控制,设置流量控制装置104的流速为恒定流速Q
步骤S605:判断检测气压P
步骤S606:进行PID充气控制,此时,控制器103控制流量控制装置104工作在变动流速阶段,控制器103基于比例-微分-积分法输出相应的控制指令给流量控制装置104,进行基于比例-微分-积分法的变动流速控制,并进入步骤S607。
在变动流速阶段,控制器103计算检测气压P
步骤S607:判断目标气压P
步骤S608:关闭通断阀201及流量控制装置104,并将平衡阀202打开预设时长t,并在完成后进入步骤S609;
具体的,控制器103关闭通断阀201,设置流量控制装置104的流速Q
步骤S609:关闭平衡阀202。
在关闭平衡阀202后,结束充气。
以上仅为本申请的实施例,并非因此限制本申请的专利范围,凡是利用本申请说明书及附图内容所作的等效结构或等效流程变换,例如各实施例之间技术特征的相互结合,或直接或间接运用在其他相关的技术领域,均同理包括在本申请的专利保护范围内。