一种电缆隧道检测机器人定位导航能力测试方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及电力检测机器人检测技术领域,具体涉及一种电缆隧道检测机器人定位导航能力测试方法。
背景技术
电力传输的稳定安全是关系到国民经济生活的一件大事,必须保证电缆长期运行的稳定正常,所以必须进行经常性维护工作。复杂多变的隧道环境制约着对高压电缆检测维修等工作,开展机器人电缆隧道检测,能够快速确定故障位置,及时消除电缆故障,在减少电缆火灾发生的同时,还能够确保电能的可靠输出,避免操作人员受到伤害,此外,检测机器人的应用还能够提高输电安全检测的自动化程度。电缆隧道检测机器人通过自身的自主定位导航功能能够科学规划行走路径,然而如何有效评价电缆隧道检测机器人的定位导航能力的优劣,需要一种切实有效,方便可行的测试方法。本发明提出的测试方法将为电缆隧道检测机器人的定位导航能力提供量化的试验和测试条件,对促进我国的电力检测机器人自主能力的提高起到重要作用。
发明内容
本发明的目的在于:提供一种电缆隧道检测机器人定位导航能力测试方法,能够对电缆隧道机器人在电缆隧道环境中的路径规划能力进行有效的测试和评价。
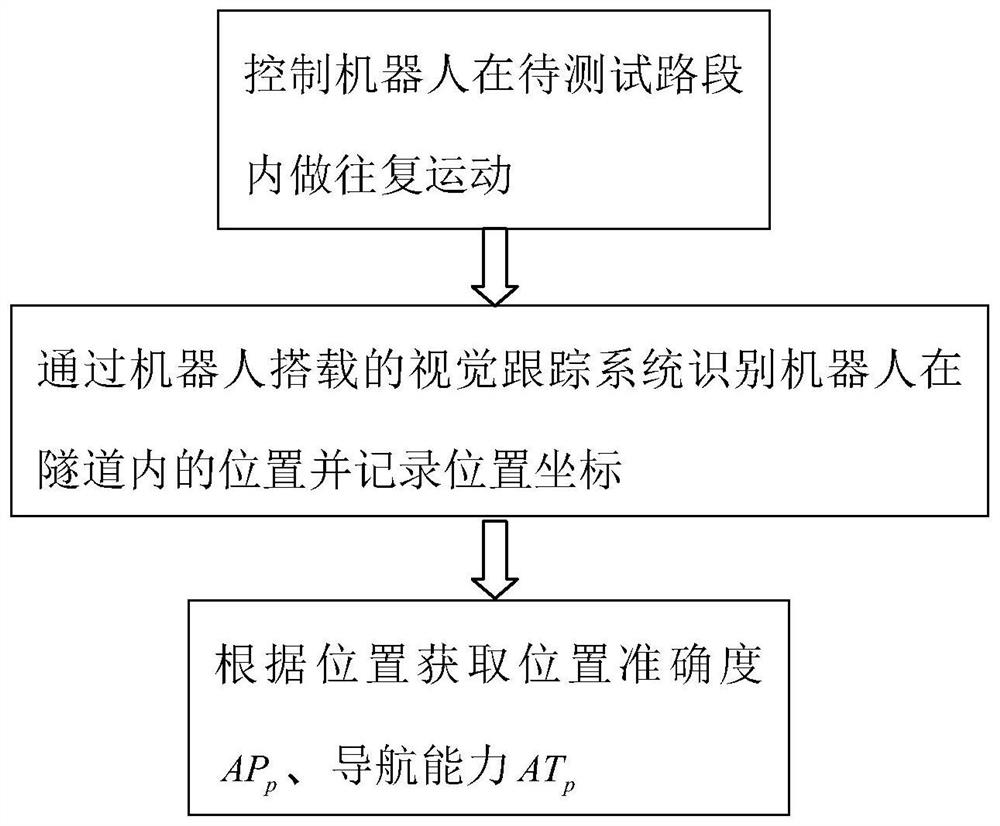
为实现上述目的,本发明所采用的技术方案是:一种电缆隧道检测机器人定位导航能力测试方法,包括以下步骤:控制机器人在待测试路段内做往复运动,通过机器人搭载的视觉跟踪系统识别机器人在隧道内的位置并记录位置坐标,根据位置获取位置准确度AP
所述的待测试路段为隧道内一段平直水泥路面,并在规定的测试区域设定位置A和位置B,两个位置之间距离为机器人长度的若干倍。
所述视觉跟踪系统识别机器人在隧道内的位置,包括:
视觉传感器,采集周围环境图像输出给数据处理器;
测试处理器,对周围环境图像中的特征点和数据库中的模板进行匹配识别特征物体,从而确定检测机器人自身的位置,用于实现计算机器人的行驶方向和轨迹;
其中,视觉跟踪系统包括视觉传感器、数据处理器。
所述测试处理器能对电缆隧道检测机器人定位和导航过程中的路径的追踪,并能实时完成所追踪的位置、运行轨迹、移动速度的记录和计算。
对于目标定位评定,所述机器人在待测试路段内做往复运动,包括如下步骤:
1)控制电缆隧道检测机器人到达位置A;
2)自动模式下使电缆隧道检测机器人到达位置B,再手动模式下返回位置A;
3)重复步骤2)N次。
对于导航能力评定,所述机器人在待测试路段内做往复运动,包括如下步骤:
1)使电缆隧道检测机器人到达位置A;
2)自动模式下使电缆隧道检测机器人到达位置B,手动模式下返回位置A;
3)A到B过程中测试处理器记录机器人累计行走距离l
4)重复步骤2)和3)N次。
所述的评估定位准确度的方法如下:
按照如下公式计算各个目标位置准确度AP
式中:所述目标位置为A或B,
所述的评估导航能力的方法如下:
在隧道待检测路段AB内的导航能力AT
AT
式中:l
本发明的优点与积极效果为:
1、本发明创新性的提出了针对电缆隧道检测机器人定位导航能力测试方法;
2、本发明能够准确评估及量化电缆隧道检测机器人的导航定位能力;
3、本发明的测试方法简单、可靠、适合大面积推广。
附图说明
图1为本发明方法流程图;
图2为本发明测试场景布置示意图;
其中,图2外框为模拟隧道环境。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方法做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
本发明提供一种电缆隧道检测机器人定位导航能力测试方法。目的是为了测试电缆隧道检测机器人在导航模式下到达指定目标点的能力,以及电缆隧道检测机器人在隧道工作环境中的路径规划能力。电缆隧道检测机器人采用视觉传感器检测周围环境中的特征点和数据库中的模板进行匹配,找到特征物体,确定检测机器人自身的位置用以实现计算机器人的行驶方向和轨迹。下面结合附图对本发明作进一步详述。
1、测试设备及测试环境布置:
测试设备:采用视觉跟踪系统对隧道检测机器人定位和导航过程中的路径进行追踪,完成所追踪的位置、行进轨迹、移动速度的记录和计算。视觉跟踪系统包括图像数据采集装置(即视觉传感器),测试处理器上的数据处理软件。
根据电缆隧道环境特点以及测试需要,测试设备要求如下:
位置准确度AP
导航能力AT
数据采集频率≥30次/s。
2、测试环境和路径布置:
选取一段平直水泥无障碍路面作为测量环境,在规定的测试区域设定位置A和位置B,两个位置之间距离为5L(L为机器人长度)(附图1)。
3、测试步骤:
种电缆隧道检测机器人的目标定位能力测试步骤如下:
(1)按电缆隧道检测机器人的操作要求做好导航准备后,使机器人到达位置A;
(2)自动模式下使电缆隧道检测机器人到达位置B,手动模式下返回位置A;自动模式为检测机器人控制系统按照任务程序的要求运行的一种操作方式,手动模式为通过检测机器人的按钮或操作指令等除自动操作外对机器人进行操作的方式。
(3)重复步骤(2)30次;
电缆隧道检测机器人导航能力测试步骤如下:
(1)按操作要求做好导航准备后使机器人到达位置A;
(2)自动模式下使机器人到达位置B,手动模式下返回位置A;
(3)A到B过程中视觉跟踪系统的测试处理器采集记录机器人行走距离l
(4)重复步骤(2)和(3)30次;
4、视觉跟踪系统对隧道机器人进行评估定位准确度和导航能力
测试完成后,根据测试数据,视觉跟踪系统的处理器计算位置准确度和导航能力。
位置准确度AP
式中:所述目标位置为A或B,
导航能力AT
AT
式中:l
l
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。
- 一种电缆隧道检测机器人定位导航能力测试方法
- 一种隧道检测机器人及隧道检测方法