一种组织切除系统及其切割参数确定方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及医疗设备领域,尤其是涉及一种组织切除系统及其切割参数确定方法。
背景技术
前列腺增生(benign prostatic hyperplasia,BPH)又称前列腺肥大,增生腺体位于膀胱颈,使尿路梗阻,引起尿频和排尿困难,严重影响患者的生活质量,是中老年男性的常见疾病,又称良性前列腺肥大,在泌尿外科住院患者中,它仅次于尿石症,居第2位。针对增生组织或癌组织,除药物治疗外,很长时间内较为常用的为传统外科切除或部分切除手术,该种方式普遍依赖开放式切口,具有侵入性强、创伤大、恢复期长等缺陷。后微创切除疗法在该领域得到广泛应用,如以各类激光、水射流、双级电刀、单级电刀等能量作为流体流用于对前列腺增生组织通过切除和/或烧灼病变或增生组织,其一般经由尿道途径进入,而无需开放式切口,具有创伤小的优点。
在利用能量对前列腺增生进行组织切除时,如何确定切割参数,是重要的。切割参数的确定,不仅影响手术的效率,更关系手术的安全性、可靠性。
以针对前列腺增生组织进行水刀切除的现有技术为例,医生在进行手术时,需要通过直肠超声探头获取超声图像,由医生通过阅读直肠超声的二维图像进行手工标注,或者手动输入参数,并将医生输入的信息转换为切割参数,用于手术过程中切割路径规划,并且,还需要根据医生的经验设置水刀运动的控制区间,在每个控制区间手动设置不同的旋转角度、水射流压强等参数。其中,对于敏感或者关键部位(如膀胱颈、精阜等)的避让,对于切割参数的位置选择、切割范围的确定均需要借助于医生的人工标记。这种方式的缺陷显而易见,由于依赖于医生的参与,一方面,鉴于图像质量及人工操作误差的客观影响使得切割参数的确定存在大量不确定性,当医生经验较少时,方案将难以进行,或者难以获得预计的切除效果,或者导致不希望的手术事故的发生,另一方面,人工标引使得医护人员工作量增大,操作繁琐也使得手术过程漫长,患者的手术体验变差,从心理上更加排斥或拒绝此类手术,贻误治疗。
发明内容
本发明的目的是提供一种组织切除系统及其切割参数确定方法,无需依赖过多的人工参与,可以快速确定组织切除系统中消融工具的最优切割参数,并使消融工具按照所确定的切割参数执行组织切除动作,能够更高效地计算出切割参数,且能够更精确的规划出更合理、更大面积的切割范围,兼顾切除效率、切除面积和安全性。
为达到上述发明目的,本发明采用了下列技术方案:
本发明提供了一种组织切除系统的切割参数确定方法,包括如下步骤:
获取目标组织的三维超声图像;
按预设步长对所述三维超声图像进行切片,获得多个二维切片图像;
确定所述二维切片图像中的目标组织轮廓信息和消融工具轮廓信息;
基于所确定的目标组织轮廓信息和消融工具轮廓信息,确定切割参数,所述切割参数至少包括:切割位置参数(L)、切割深度参数(R)、切割角度参数(β)中的一项。
作为优选,所述确定切割参数的步骤还包括:获取消融工具轮廓的拟合圆心,作为检测圆心;以该检测圆心为圆心,采用扇形拟合法或旋转半径法确定所述切割深度参数(R)和所述切割角度参数(β),以获得安全范围内的最大切除面积。
作为优选,所述确定切割参数的步骤还包括:获取消融工具轮廓的拟合圆心,在预设角度范围内,以该圆心与目标组织轮廓上各交点之间距离的最小值为基准,确定所述切割深度参数(R)。
作为优选,针对至少一个所述二维切片图像,所确定的切割深度参数(R)和切割角度参数(β)为多组切割深度参数和切割角度参数的组合。
作为优选,所述目标组织为前列腺增生组织,所述消融工具为水刀,通过直肠超声探头获取所述三维超声图像。
作为优选,还设置有安全系数,基于所述安全系数确定所述切割参数。
本发明还提供了一种用于切除目标组织的组织切除系统,包括:
运动控制模块,所述运动控制模块包括固定基准部件、与所述固定基准部件相连接的第一运动控制部件和第二运动控制部件;
消融工具模块,所述消融工具模块包括消融工具,所述消融工具与第一运动控制部件相连接;
三维超声成像模块,所述三维成像模块包括超声探头,用于获取目标组织的三维超声图像信息,所述超声探头与所述第二运动控制部件相连接;
处理器,所述处理器用于按照预设步长对所述三维超声图像进行切片,获得多个二维切片图像,确定所述二维切片图像中的目标组织轮廓信息和消融工具轮廓信息;基于所确定的目标组织轮廓信息和消融工具轮廓信息,确定切割参数,所述切割参数至少包括:切割位置参数(L)、切割深度参数(R)、切割角度参数(β)中的一项。
作为优选,所述消融工具模块基于所述处理器计算的切割参数执行切割。
作为优选,所述消融工具为细长轴形,其末端具有能量出射端口,用于将能量经由所述能量出射端口引导至待切除目标组织,以执行对目标组织的消融切除。
作为优选,所述目标组织为前列腺增生组织,所述消融工具为水刀,所述超声探头为直肠超声探头。
作为优选,所述处理器还获取消融工具轮廓的拟合圆心,作为检测圆心;以该检测圆心为圆心,采用扇形拟合法或旋转半径法确定所述切割深度参数(R)和所述切割角度参数(β),以获得安全范围内的最大切除面积。
作为优选,所述处理器还获取消融工具轮廓的拟合圆心,在预设角度范围内,以该圆心与目标组织轮廓上各交点之间距离的最小值为基准,确定所述切割深度参数(R)。
作为优选,针对至少一个所述二维切片图像,所确定的切割深度参数(R)和切割角度参数(β)为多组切割深度参数和切割角度参数的组合。
本发明还提出一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如本发明任一实施例所述的方法。
本发明还提出一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如本发明任一实施例所述的方法。
本发明具有如下有益效果:本发明技术方案一方面,能够通过对图像轮廓信息及位置信息的处理、计算,快速获得组织切除工具的切割参数,减少了人工标记的繁琐,使得组织切除系统能够快速确定切割参数;另一方面,本发明技术方案还能针对每个二维切片图像,确定在该二维切片图像所在平面内的所述组织切除工具的切割参数,从而为更精准的切割参数的确定、以及组织消融工具的运动控制提供了基础与可能;再者,通过本发明所提供的技术方案,能够确保在每个二维切片图像上,切除面积尽可能最大化,以确保安全范围内最大面积的切除。
本发明技术方案尤其适用于前列腺增生切除手术,在适用于BPH切除手术时,本发明的技术方案可快速、精确标记出切割轮廓以及切割时需避开的敏感位置如精阜位置等,以及标记出切割起始位置、切割结束位置,使得机器人手术规划和执行成为可能,可有效解决现有技术中人工参与过多、误差大、精确度低、手术过程久、安全性差等问题,极大提高了手术安全性、可靠性、以及手术效率。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为根据本发明一实施例所提供的组织切除系统的主要结构及其连接关系示意图;
图2为根据本发明一实施例所提供的组织切除系统的主要模块示意图;
图3为根据本发明一实施例所提供的组织切除系统的切割参数确定方法的流程示意图;
图4为根据本发明一实施例所提供的前列腺增生组织切除系统的切割参数确定方法的流程示意图;
图5-1、5-2、5-3、5-4为根据本发明一实施例所提供的切割参数确定方法的原理说明示意图;
图6-1、6-2为根据本发明又一实施例所提供的切割参数确定方法的原理说明示意图;
图7为根据本发明又一实施例所提供的切割参数确定方法的原理说明示意图;
图8为根据本发明一实施例所提供的切割参数确定方法流程图;
图9为根据本发明又一实施例所提供的切割参数确定方法流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。虽然本发明具体实施例部分详细描述了许多技术细节,但需知悉的是这些细节不构成对本发明保护范围的限制。基于本发明所公开的技术方案,本领域普通技术人员在未进行创造性劳动的前提下所作出的任何改进或变动,亦属于本发明的保护范围。
需说明的是本发明虽是基于前列腺增生组织的切除对切除系统及切割参数确定的方案进行的介绍,但本领域技术人员在本发明的基本方法、宗旨和精神下,根据目标组织的差异,可对本发明方法和系统作适应性调整,同样可利用于处理任何其他类似的人体组织器官,如肾、肝、皮肤、肌肉、腺体、食道、咽喉、肠等,亦属于本发明的保护范围。
本发明所使用术语中,“目标组织”是指待切除的人体组织或病灶组织,“目标组织工作区域”是指为了切除目标组织或病灶组织,将消融工具插入并执行切割动作的区域。“消融工具”是指通过能量(如水射流、激光、电等)对组织进行切割、烧灼等,使得目标组织或病灶组织被消融或切除(通常表现为体积减小)的工具。“切割角度”是指用于消融组织的能量从所述能量出射端口出射后旋转所扫过的角度。“切割深度”、“切割半径”,是指用于消融组织的能量从所述能量出射端口出射后所能抵达的最远距离,在规划时体现为扇形半径,在水射流手术中,该参数与水射流的压强有关。“切割位置”是指所述组织消融装置的能量出射端口在手术过程中沿轴向运动所处的位置。“切割轮廓”是指在某一切割位置处,按照所确定的切割深度参数、切割角度参数,形成切割路径规划的整体形状的外轮廓线。在该轮廓线内的部分成为“切割范围”,切割范围内的面积称为“切除面积”。
本发明中如无特别说明,“近端”、“后端”是指手术或成像装置中距离操作者相对更近、距离目标组织相对更远的一端,“远端”、“前端”、“末端”则是指手术或成像装置中距离操作者相对更远、距离目标组织相对更近的一端。
以下结合附图,详细说明本发明各实施例提供的技术方案。
如图1所示,本发明所提供的一种用于切除目标组织的组织切除系统,该系统为可用于治疗前列腺增生的医用水刀机器人系统,该系统包括运动控制模块、消融工具模块、三维超声成像模块和处理器。其中,运动控制模块包括作为固定基准部件的固定基座100、与固定基座100相连接的第一运动控制部件和第二运动控制部件,第一运动控制部件可以是第一机械臂110,第二运动控制部件可以是第二机械臂120,第一机械臂110和第二机械臂120与所述固定基座100转动配合连接,其中第一机械臂110和第二机械臂120端部均设置有编码器、或其他类似的可用于传输第一机械臂和第二机械臂位置的位置反馈装置或定位装置。第一机械臂110和/或第二机械臂120可以相同也可以不同,本领域技术人员可以根据需要选择,如可选择6轴、7轴机械臂,可选择均为主动机械臂,均为被动机械臂,或一个为主动机械臂、另一个为被动机械臂。此外,在一些实施例中,第一机械臂110和/或第二机械臂120还可用可转动支架代替。
其中,固定基座100主要用来作为固定基准,对其结构不作限制,以固定基座100所在的坐标系作为标准坐标系。固定基座100内置或外部连接设置有一个或多个处理器(CPU),处理器中存有预设的算法对应程序,能够从消融工具模块、运动控制模块、三维超声成像模块获取数据,并对所获取的数据进行计算、处理,并将计算处理所得的数据发送至控制模块或显示模块。
消融工具模块包括消融工具、内窥镜及鞘套。其中消融工具及内窥镜装置集成在鞘套112内,消融工具为细长轴形,其末端具有能量出射端口(图中未示出),通过能量出射端口可将用于切除目标组织的能量传递至目标组织工作区域,并通过所述能量切割目标组织,所述用于切除组织的能量源可以是水射流、激光、或者电能。在用于治疗前列腺增生的医用水刀机器人系统时,消融工具所采用的能量为水射流,将具有一定压强的水射流输出至目标组织,能够破碎或移除目标组织。消融工具及内窥镜装置后端部伸出鞘套112与固定设置在第一机械臂110前端部的第一适配器111插接配合,使得第一机械臂110能够带动经标定的消融工具沿着细长轴的轴线方向前进或者后退,并能够带动消融工具以细长轴的中心轴线为旋转轴旋转运动,使得能量出射端口的出射方向旋转摆动。鞘套112呈细长管状,在针对前列腺增生组织进行切除手术时,将鞘套112沿尿道插入至前列腺200内。
三维超声成像模块包括超声探头122,超声探头122呈细长管状,其后端与固定设置在第二机械臂120前端的第二适配器121插接配合,第二机械臂120及第二适配器121能够带动超声探头122沿细长管的轴线方向前进或后退,以及以细长管的轴线为旋转轴进行旋转运动。第二机械臂120带动经图像位置标定的超声探头122按预定速度前进,所述细长管状的超声探头122沿患者的直肠通道插入人体,在插入过程中,超声探头122依序采集超声矢状面图像和超声断层面图像。根据所采集的超声断层面图像序列,可以重建出三维超声图像。也可采用其他方式获取三维超声图像。
根据本实施例提供的方案之一,超声探头122为直肠双平面超声探头,对该超声探头预先做图像标定;消融工具为水刀(即提供足以破碎目标组织的压强的水射流的消融工具),对水刀预先做位置标定。上述标定的目的在于,统一超声探头采集图像与水刀的坐标系,采用本领域已知的设置位置传感器等标定技术能够实现即可。
对获取的三维超声图像按照预定步长进行切片,获得多个二维超声切片图像,针对每个二维超声切片图像,处理器计算确定切割参数,所述切割参数至少包括切割位置参数L、切割深度参数R、切割角度参数β中的一项。在确定切割参数后,处理器将切割参数信息发送至运动控制模块和消融工具模块,使得消融工具模块基于所确定的切割参数执行切割。
图2示出的为根据本发明一实施例所提供的组织切除系统的组成模块,该组织切除系统包括消融工具模块、超声成像模块、运动控制模块和处理器。其中,处理器被配置为能够获取相关信号和数据,通过本发明所提供的计算方法确定切割参数,并将所确定的切割参数发送至运动控制模块及消融工具模块,以使消融工具模块按照所确定的切割参数执行切割。
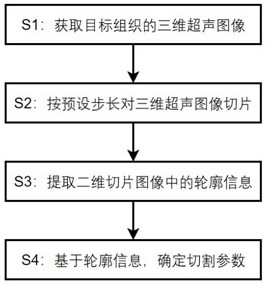
图3示出的为根据本发明一实施例所提供的组织切除系统的切割参数确定方法的基本流程示意图,如图所示,基本流程包括如下步骤:
步骤S1:通过超声探头获取目标组织(例如,前列腺)的三维超声图像。
步骤S2:对三维超声图像切片分层,形成一系列二维切片图像,作为优选,沿超声探头轴向方向,按照预设步长进行切片分层。
步骤S3:针对所述一系列二维切片图像中的至少部分二维切片图像,确定轮廓信息,所确定的轮廓信息包括消融工具的轮廓信息以及目标组织的轮廓信息。
步骤S4:并基于所确定的轮廓信息,计算切割参数。
步骤S1中,获取目标组织的三维超声图像,可以是根据已有技术中的任意方式获得,较为常用的,例如通过获取目标组织的多个断层图像,进行三维重建,通过三维重建获得目标组织的三维超声图像。
步骤S2中,对三维超声图像,沿着轴向方向,按照预设步长进行切片,通过切片,可以获得一个或多个二维切片图像,该一个或多个二维切片所在的轴向位置,即为切割位置,切割位置参数L可以表示为L1,L2,L3……。
步骤S3中,针对与选定的切割位置参数(L1,L2,L3,……)对应的二维切片,确定该二维切片图像中消融工具的轮廓信息C1,以及目标组织的轮廓信息C2。
以及,步骤S4中,根据步骤S3所确定的消融工具的轮廓信息C1、以及目标组织的轮廓信息C2,计算该二维切片对应的切割角度参数β,以及切割深度参数R。
在步骤S4完成后,可以得到一系列切割参数,例如:
在L1位置处,通过计算,可得切割角度参数β1,切割深度参数R1;
在L2位置处,通过计算,可得切割角度参数β2,切割深度参数R2;
在L3位置处,通过计算,可得切割角度参数β3,切割深度参数R3;
……。
处理器将步骤S4计算确定的一系列切割参数发送至控制单元,用于带动消融工具运动使其能量出射端口在相应的切割位置Ln时,按照与该切割位置对应的切割角度βn、切割深度Rn执行切割。
图4示出的为根据本发明一实施例所提供的一种用于治疗前列腺增生的医用水刀机器人系统的切割参数的确定方法的流程示意图。
当组织切除设备用于前列腺增生切除手术时,选择所述消融工具为水刀,所述超声探头为直肠超声探头。
步骤S00,为系统初始化阶段,在该阶段,需将经图像标定的超声探头插入直肠,并将经标定的水刀插入尿道,超声探头和水刀的上述运动可由第一机械臂110、第二机械臂120控制;
步骤S01,将超声探头与水刀完成对位,二者插入患者体腔的方向大致平行,超声探头的方向应确保前列腺组织的图像在超声探头视野范围内,水刀的方向应确保能量出射端口方向大致为竖直向下;
步骤S10,利用超声探头获取前列腺组织的三维超声图像,该超声探头为直肠双平面超声探头,作为可选的方案,例如,在探头前端设置有具一定曲率半径的凸阵探头,用于获取横切面图像序列,在探头的轴向侧面设置有一线阵探头,用于获取矢状面图像序列。根据超声探头获取的横切面图像序列,重建可得目标前列腺组织的三维超声图像。
步骤S20,对前列腺组织的三维超声图像进行切片,获得一系列二维切片图像,并可选的,在步骤S21,对获得的一系列二维切片图像进行分类,分类标准可以是目标组织的体积、工作区域所在位置、目标组织的其他解剖特点等。
步骤S30,确定二维切片图像中的轮廓信息,该轮廓信息包括消融工具的轮廓信息以及目标组织的轮廓信息,其中,目标组织的轮廓信息可以是基于对二维切片图像的轮廓提取获得,消融工具的轮廓信息可以通过预先确定的参考结构图像与目标组织图像的对准、匹配而获得。
步骤S40,根据步骤S21所确定的分类类别,针对二维切片图像分别对应不同的规划算法,针对距离敏感部位较远的二维切片图像,执行基础规划算法,针对距离敏感部位较近的二维切片图像,执行扩展规划算法。
步骤S41,根据步骤S40确定的规划算法,计算确定该二维切片图像的切割参数,该切割参数可以是切割角度、切割深度,例如在切割位置L1,所确定的切割参数为β1、R1;该切割参数也可能是不同切割角度、切割深度的组合,例如在切割位置L1,所确定的切割参数为:β11-R11、β12-R12……的组合。
在步骤S41之后,消融工具水刀即可按照步骤S41确定的切割参数执行切割。当切割参数为(L1、β1、R1)时,表示在切割位置L1,水刀的切割角度为β1,切割半径为R1,水刀的切割范围则为以水刀轴心为圆心、切割角度β1、切割半径R1限定的扇形范围,水刀的切除面积则大致相当于该扇形区域的面积。当切割参数为(L1,β11-R11、β12-R12)时,表示在切割位置L1,水刀的切割范围包括两部分:分别是以水刀轴心为圆心,β11角度范围、R11半径范围限定的第一扇形区域,以及以水刀轴心为圆心,β12角度范围、R12半径范围限定的第二扇形区域;此时,水刀在位置L1处的切除面积则大致相当于第一扇形区域、以及第二扇形区域的面积之和。
下面将对水刀的切割深度参数、切割角度参数的确定步骤做详细说明。
如图5-1至图5-4所示,是以拟合扇形法确定切割参数的原理说明,该方法的主要步骤参见图8。
在基准坐标系下,C2为所提取的目标组织的外轮廓,C1为消融工具的外轮廓,在前列腺增生切除手术中,C2的形状大致为椭圆,但是整体不规则,轮廓边缘可见各种弯曲,C1的形状为大致圆形或椭圆形,可以通过拟合方式获得其圆心O。圆心O的位置通常位于目标组织轮廓中心偏上的位置。
步骤S101:确定二维切片图像中消融工具的轮廓信息C1,获取二维切片图像中消融工具轮廓C1的拟合圆心,作为检测圆心O。
步骤S102,确定第一切割半径R1。第一切割半径R1的确定方式,例如可以是:设置检测范围,该检测范围以检测圆心O为圆心,以预设的检测范围角度α为检测角度(检测角度α为根据经验预设的合理范围内的数值即可,例如可在30度-60度范围内选择),如图5-1所示,检测角度α范围内,从圆心O到目标组织轮廓C2的距离是变化的(图中Oa1-Ob1的区域),以最小距离作为检测半径r1。可以预设安全系数,安全系数随目标组织的不同而变化,可通过实验确定或者机器学习技术等获取,以最小距离r
步骤S103,以圆心O、切割半径R1拟合第一扇形,可得切割半径R1与前列腺轮廓C2的交点c
步骤S104,如图5-3、图5-4所示,以与S102类似的方式,确定第二切割半径R2,用于拟合第二扇形,并计算该第二扇形的切除面积S2。
步骤S105,确定多个不同切割半径数值R3……Rn,用于拟合多个扇形,并计算所拟合的多个扇形与组织轮廓C2的交点,计算切除面积S3……Sn。
步骤S106,在S1……Sn中,选择最大切除面积Smax,并基于该最大切除面积所对应的扇形,确定切割角度参数βmax、以及切割深度参数Rmax。
可以理解,第二切割半径R2,可以通过设置不同检测角度α的位置和范围、并筛选最小距离的方式确定,也可以通过其他方式确定,例如基于R1的数值递减。
以及,可以理解,步骤S105中,所采集的切割半径样本数值n,可以是基于经验值设置,作为优选,也可以是根据计算速度确定,以及作为优选,可以将停止计算的样判断条件设为切除面积Sn与目标组织总面积S比值是否达到阈值,即如果Sn/S大于阈值,则以该Sn所对应的拟合扇形,确定切割角度参数βn、以及切割深度参数Rn。
如图6-1至图6-2所示,是以旋转半径法确定切割参数的原理说明,该方法的主要步骤参见图9。
图6-1中,点A为基于消融工具轮廓C1确定的拟合圆心O,POLYLINE为目标组织的轮廓线C2,从点A出发,向轮廓线C2引区域分割线AD,将目标组织图像分为E、F两部分,该分割线AD与组织轮廓线C2的交点为D,线段AD的长度为第一旋转半径R1。
步骤S201,确定消融工具轮廓C1的拟合圆心、目标组织轮廓C2;
步骤S202,从消融工具拟合圆心出发,以第一旋转半径R1为旋转半径,从起始线AD出发,AD的方向优选为竖直方向,分别向左旋转、向右旋转,确定第一旋转半径R1与POLYLINE的两个交点,并基于两个交点a1、b1位置,计算Aa1b1所覆盖的切除面积,作为第一切除面积S1。
步骤S203,按照固定步长负方向调整旋转半径为第二旋转半径R2、第三旋转半径R3……、第n旋转半径Rn,分别针对每个旋转半径旋转确定第二切除面积S2、第三切除面积S3……第n切除面积Sn。
步骤S204,停止旋转半径检测,在S1……Sn中,选择最大切除面积Smax,并基于该最大切除面积所对应的扇形,确定切割角度参数βmax、以及切割深度参数Rmax。
图7为旋转半径法的扩展应用的又一实施例的原理说明。根据该优选方案,起始线AD可以设置为非竖直方向,也可以设置为多条,例如与竖直线呈30度-60度范围夹角的方向。如图7所示,AC为第一起始线,AB’为第二起始线,按照与图6、图9相似的步骤,进行半径旋转,并计算切除面积,基于最大或最优切除面积确定切割角度参数、切割深度参数。可以理解的是,所确定的切割角度参数、切割深度参数可以是数值组合。图7的实施例尤其适用于针对多刀头需要分别设置参数的情形,也可适用于需要避开敏感区域或其他特定区域的情形。
根据本发明提供的又一实施例,还可以采用的切割参数确定方式包括:获取消融工具轮廓的拟合圆心,在预设角度(β)范围内,遍历该圆心与目标组织轮廓的交点获取全部半径值,并以最小半径值为基准,确定所述切割深度参数R以及切割角度参数β。预设角度范围例如可选择为150°-240°的范围,优选为220°。
作为上述实施例的优选方案,可以在不同方向设置不同的预设角度范围,例如,以从能量出射端口竖直向下的方向为分割线,在左右两个区域各设置预设角度范围β1,β2,分别在两侧的预设角度β1、β2范围内,遍历圆心与目标组织轮廓的交点获取全部半径值,并以最小半径值为基准确定该预设角度β1范围内的切割深度参数R1,以及预设角度β2范围内的切割深度参数R2。
在一些实施例中设置多个消融工具,同样可采用上述方法确定二维切片图像上切割扇形的信息,但需处理器增加控制多个消融工具的切割范围不相重合的方法步骤,筛选出多消融工具切割范围之和最大的切割位置,从而确定各消融工具切割扇形的位置、角度及半径信息。
在一些实施例中,还可对目标组织轮廓分区域进行参数确定及规划,例如可分成两个区域,确定每个区域中切割扇形的位置、角度及半径信息,所采用方法可为本发明中任何一种方法实现。
本领域技术人员可根据目标组织轮廓的形状选择上述任一或者类似的切割扇形确定方法,以适用于多种形状不同、结构各异的目标组织。
本发明还提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明中任一实施例所述的方法。
进一步地,本发明还提出一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如本发明任一实施例所述的方法。
需说明的是,上述步骤顺序仅为清晰说明本实施例而进行的说明,不构成对处理步骤先后的限制。实际上,上述步骤可以以不同的顺序完成,本领域技术人员根据需要进行调整即可,且可添加和/或删除某些步骤,其中部分步骤还可包含若干子步骤,对于较为常规的处理步骤本文不再赘述。若有利于处理,还可重复上述某些步骤。
本领域技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
内存可能包括计算机可读介质中的非永久性存储器,随机存取存储器 (RAM) 和/或非易失性内存等形式,如只读存储器 (ROM) 或闪存(flash RAM)。内存是计算机可读介质的示例。
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。本发明中所引用的如“前”、“后”、“前进”、“后退”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明的发明范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。