信息处理装置及方法、自主行进机器人装置和存储介质
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及对移动体的位置/姿势进行处理的信息处理装置、信息处理方法、自主行进机器人装置和存储介质。
背景技术
为了在诸如工厂或物流仓库等的环境中自动移动诸如输送器运载工具(例如,自动导引运载工具(AGV))等的移动体,需要预先设置行进路径。设置最佳路径的方法包括如日本特开2015-34775中所述的设置通过具有高GPS定位精度的点的移动路径的方法。
使用来自照相机的拍摄图像的同时定位和建图(SLAM)技术已知为测量移动体的位置/姿势的方法。SLAM同时并行地进行生成用于位置/姿势测量的地图的处理和使用该地图的位置/姿势测量处理。在文献“Raul Mur-Artal,et.al,ORB-SLAM:A Versatile andAccurate Monocular SLAM System.IEEE Transactions on Robotics,2015.”中描述了在SLAM中涉及关键帧和束(bundle)调整的方法。
对于使用SLAM技术的移动体的自动行进(自主行进),需要设置能够可靠地测量移动体的位置/姿势的路径。然而,即使使用日本特开2015-34775的方法,尽管使用了位置信息,但是也可能无法设置可以可靠地测量移动体的位置/姿势的路径。因此,本发明的目的是提供可以示出能够可靠地自动行进(自主行进)的区域的信息处理装置。
发明内容
根据本发明的一方面的信息处理装置包括至少一个处理器或电路,所述至少一个处理器或电路被配置为用作:历史获取单元,其被配置为获取基于来自移动体上安装的照相机的拍摄图像而估计的所述移动体的位置/姿势的历史信息;布置信息获取单元,其被配置为获取指示在所述移动体移动的空间中的障碍物的布置的障碍物布置信息;自主行进可能性信息获取单元,其被配置为基于所述历史获取单元所获取的所述历史信息来获取自主行进可能性信息,所述自主行进可能性信息指示能够进行用于使所述移动体自主行进的设置的区域;以及地图图像生成单元,其被配置为基于所述障碍物布置信息和所述自主行进可能性信息,生成示出所述障碍物的布置和能够自主行进的所述区域的地图图像。
从如下参考附图的实施例的描述,本发明的其他特征将变得明显。
附图说明
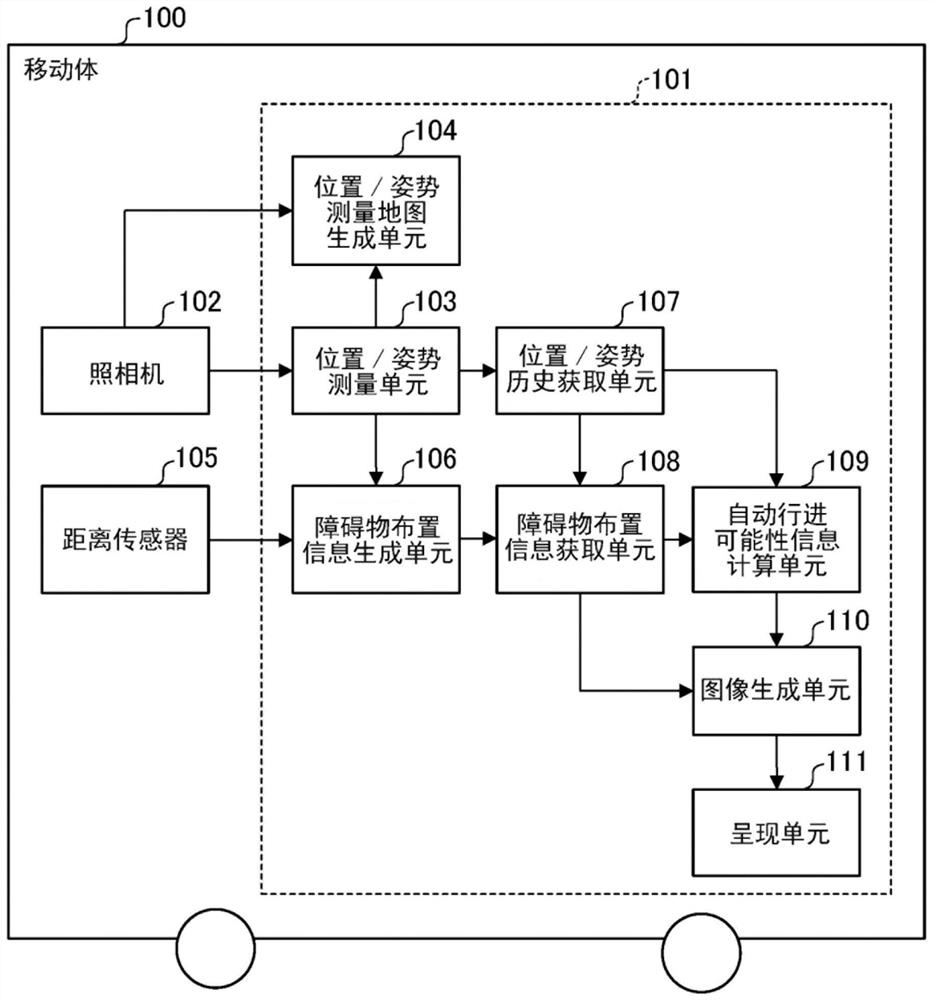
图1是示出包括根据本发明第一实施例的信息处理装置的移动体的示例性配置的功能框图。
图2是第一实施例的信息处理装置101的硬件配置图。
图3是示出根据第一实施例的信息处理装置执行的处理的流程图。
图4是示出表示在第一实施例中生成的自动行进可能性信息的CG图像的示例的图。
图5是示出将示出自动行进可能性信息的CG图像叠加在障碍物布置图像上的图像的示例的图。
图6是示出根据第四实施例的信息处理装置的示例性配置的功能框图。
图7是示出根据第四实施例的处理过程的流程图。
图8是示出根据第四实施例的路径搜索结果的示例的图。
具体实施方式
以下将参照附图使用实施例描述本发明的有利模式。在各个图中,相同的附图标记应用于相同的构件或元件,重复的描述将被省略或简化。
第一实施例
在移动体的自动行进中,基于用于位置/姿势测量的地图和来自移动体上安装的照相机的拍摄图像,进行移动体的位置/姿势测量。为了测量位置/姿势,移动体需要在生成用于位置/姿势测量的地图时所测量出的位置和姿势附近行进。因此,在第一实施例中,将不仅关于位置还关于姿势的信息用于自动行进(自主行进)。在以下实施例中,以与自主行进相同含义使用自动行进。
这里,移动体的姿势是指移动体的前进方向(行进方向)。在第一实施例中,假设将一个照相机安装在移动体上,并且对移动体的前进方向(行进方向)上的预定视角进行拍摄。然而,即使当多个照相机安装在移动体上时,移动体的位置/姿势也具有与对移动体的前进方向上的预定视角进行拍摄的照相机的位置/姿势相同的含义。对移动体的前进方向上的预定视角进行拍摄的照相机的位置/姿势可以包括诸如侧倾、俯仰和横摆等的摄像轴的角度(摄像方向的角度)。
在第一实施例中,与障碍物布置信息一起显示与移动体可以自动行进的位置、范围和方向及其可靠度有关的信息。这使得能够检查可以可靠地测量位置/姿势的路径的位置和方向。
图1是示出根据第一实施例的包括信息处理装置的移动体的示例性配置的功能框图。第一实施例的移动体例如是自主移动机器人(AMR)(即为自主行进机器人装置)。图1所示的一些功能框通过使信息处理装置中包括的计算机执行作为存储介质的存储器中存储的计算机程序来实现。
然而,一些或全部功能框也可以通过硬件实现。专用电路(ASIC)或处理器(诸如可重构处理器或DSP等)等可以用作硬件。图1所示的功能框不必并入到相同的壳体中,并且信息处理装置可以由通过信号线彼此连接的分离的装置来构建。
在第一实施例中,移动体100能够自主行进,并且包括作为摄像装置的照相机102、距离传感器105和信息处理装置101等。信息处理装置101包括位置/姿势测量单元103、位置/姿势测量地图生成单元104、障碍物布置信息生成单元106、位置/姿势历史获取单元107、障碍物布置信息获取单元108、自动行进可能性信息计算单元109、图像生成单元110和呈现单元111等。信息处理装置不必安装在作为移动体的AMR(自主行进机器人装置)内。
照相机102固定在移动体100上,并对移动体100的前进方向上的预定视角进行拍摄,以生成作为强度图像的拍摄图像。位置/姿势测量单元103基于从照相机102获得的拍摄图像来计算移动体100的位置/姿势以及位置/姿势的可靠度。稍后将描述位置/姿势测量和位置/姿势可靠度计算方法的细节。
位置/姿势测量地图生成单元104基于来自照相机102的拍摄图像和由位置/姿势测量单元103测量出的移动体的位置/姿势,生成表示在自动行进(自主行进)期间使用的图像特征群的三维位置的用于位置/姿势测量的地图。距离传感器105固定在移动体100上,并且相对于移动体100获取在预定方向上的场景的三维形状数据。距离传感器105包括相位差检测型的图像传感器、立体照相机、LiDAR或TOF传感器等。三维形状数据包括三维点群的坐标值。
障碍物布置信息生成单元106生成指示移动体移动的空间中的障碍物的布置的信息。具体地,障碍物布置信息生成单元106生成示出障碍物布置的图像(障碍物布置图像)。这里,假设通过以下来获得障碍物布置图像:在基于位置/姿势测量单元103测量出的移动体的位置/姿势对距离传感器105获取的三维形状数据进行合成之后,将该三维形状数据正交投影到与距地面预定高度处的位置相对应的二维平面上并进一步将投影图像转换为预定大小的图像。
通过平移和缩小投影图像使得正交投影到平面上的点群的整体落在预定图像大小内、并且将与点群的位置相对应的像素位置的像素值设置为255并将不与点群的位置相对应的像素位置的像素值设置为0,进行到预定大小的图像的转换。位置/姿势历史获取单元(历史获取单元)107获取移动体100的位置/姿势历史信息和位置/姿势可靠度历史信息以及测量时间信息,并将获取的信息保存为历史,其中,位置/姿势历史信息是位置/姿势测量单元103基于来自移动体上安装的照相机的拍摄图像已经计算出的。
障碍物布置信息获取单元108用作获取由障碍物布置信息生成单元106生成的障碍物布置信息的布置信息单元,其中该障碍物布置信息指示移动体移动的空间中的障碍物的布置。自动行进可能性信息计算单元109用作自主行进可能性信息获取单元,其中自主行进可能性信息获取单元基于由位置/姿势历史获取单元107获取的历史信息来获取指示用于可以使移动体自主行进的设置的区域和方向的自动行进可能性信息。自动行进可能性信息包括移动体的位置、行进方向、范围和位置/姿势测量的可靠度。稍后将描述计算该自动行进可能性信息的方法。
图像生成单元110创建示出由自动行进可能性信息计算单元109计算出的位置、行进方向、范围和可靠度的CG图像,并且生成将CG图像叠加在由障碍物布置信息获取单元108获取的示出障碍物布置状态的图像上的图像作为地图。这里,图像生成单元110用作地图图像生成单元,其中地图图像生成单元基于障碍物布置信息和自动行进可能性信息(自主行进可能性信息)来生成示出障碍物的布置以及移动体可以自动行进的区域和方向的地图图像。呈现单元111将由图像生成单元110生成的图像发送到图2的显示单元216,以将图像呈现给负责创建障碍物布置地图的作业人员(用户)。即,呈现单元111用作控制地图图像的显示的显示控制单元。
图2是第一实施例的信息处理装置101的硬件配置图。附图标记211表示作为控制与系统总线220连接的各种装置的计算机的CPU。附图标记212表示存储BIOS程序和引导程序的ROM。附图标记213表示用作CPU 211的主存储装置的RAM。
附图标记214表示存储由信息处理装置101处理的计算机程序的外部存储器。输入单元215是键盘、鼠标或机器人控制器等,并且进行与信息等的输入相关的处理。显示单元216根据来自CPU 211的指令将信息处理装置101的计算结果输出到显示装置。显示装置可以是诸如液晶显示装置、投影仪或LED指示器等的任意类型。附图标记217表示I/O接口,其中照相机102和距离传感器105通过该I/O接口连接到信息处理装置101。
图3是示出根据第一实施例的信息处理装置执行的处理的流程图。处理步骤包括初始化步骤S100、位置/姿势历史获取步骤S101、障碍物布置信息获取步骤S102、自动行进可能性信息计算步骤S103、图像生成步骤S104、呈现步骤S105、结束判断步骤S106等。
图3中的各个处理步骤的操作由信息处理装置101中的计算机执行存储器中存储的计算机程序来进行。下面将详细描述各个处理步骤。在步骤S100中,进行初始化。具体地,例如,读取网络上存在的外部存储装置所保持的位置偏差的容许量的设置值。
在步骤S101(历史获取步骤)中,获取由位置/姿势测量单元103测量的移动体100的位置/姿势信息和位置/姿势可靠度信息以及测量时间信息。在步骤S102(布置信息获取步骤)中,获取障碍物布置图像,作为指示障碍物的布置的障碍物布置信息。
在步骤S103(自主行进可能性信息计算步骤)中,计算用于指定移动体100可以自动行进的区域的自动行进可能性信息。自动行进可能性信息包括位置、行进方向、范围和可靠度。位置是由位置/姿势历史获取单元107获取的移动体100的位置。行进方向是移动体100的位置按时间顺序连接的方向。当移动体100正在向前移动时,前进方向是按照时间的升序连接移动体100的位置的方向,并且当移动体100正在向后移动时,前进方向是按照时间的降序连接移动体100的位置的方向。范围是能够可靠地测量移动体100的位置/姿势的范围。
由此,自动行进可能性信息计算单元109计算由位置/姿势历史获取单元107获取的位置按照位置/姿势测量时间的顺序改变的方向作为移动体100可以自动行进的方向。可以测量位置/姿势的范围是以在步骤S101中获取的移动体100的位置为中心并且以位置偏差的容许量为半径的圆的区域。即,移动体100可以自动行进的区域相对于位置/姿势历史获取单元107所获取的位置在预定距离内。稍后将描述可靠度。
在步骤S104(地图图像生成步骤)中,生成示出在步骤S103中计算出的自动行进可能性信息的CG图像,并且生成将CG图像叠加在步骤S102中获取的障碍物布置图像上的地图图像。在步骤S105中,在显示单元216上显示在步骤S104中生成的图像。图4是示出表示在第一实施例中生成的自动行进可能性信息的CG图像的示例的图。在图4中,实线G401、实线G402和实线G403指示障碍物,并且夹在实线G401和实线G402之间的区域以及夹在实线G401和实线G403之间的区域是通路。箭头线G404的线指示移动体可以行进的位置,并且箭头的方向指示移动体可以行进的方向。
在箭头线的背景中的阴影区域G405是移动体能够可靠地行进的区域,并且阴影线的浓度指示可靠度。阴影线的浓度越大,可靠度越高。在步骤S106中,负责创建障碍物布置地图的作业人员(用户)检查在步骤S105中显示的图像,并判断是否结束图3的系列处理。如果作业人员判断为不结束处理,则处理返回到步骤S101。如果作业人员判断为结束处理,则图3的处理结束。
由位置/姿势测量地图生成单元104生成的用于位置/姿势测量的地图具体包括拍摄图像、在摄像时照相机的位置/姿势、从拍摄图像检测到的图像特征在拍摄图像中的二维位置、以及图像特征的三维位置。图像特征是指示图像中诸如角等的几何结构的特征点。拍摄图像、摄像时的位置/姿势、从拍摄图像检测到的图像特征以及特征的三维位置的集合被称为关键帧。
由位置/姿势测量单元103进行的位置/姿势测量包含进行束调整和估计移动体的位置/姿势。在束调整中,计算投影点与图像特征的位置之间的差之和(残差),其中投影点是位置/姿势测量地图生成单元104所保持的图像特征的三维位置在与关键帧相对应的预定二维区域上的投影,并且该图像特征的位置是从自动行进期间的拍摄图像检测到的。然后,测量使残差最小的照相机的位置/姿势。残差也用于稍后将描述的可靠度的计算。因为涉及关键帧和束调整的方法的示例的详细描述包括在“Raul Mur-Artal,et.al,ORB-SLAM:A Versatile and Accurate Monocular SLAM System.IEEE Transactions on Robotics,2015”中,所以这里省略了该示例的描述。
基于位置/姿势测量单元103已测量位置/姿势时获得的残差来计算位置/姿势测量的可靠度。具体地,残差越小,可靠度越高,并且残差越大,可靠度越低。例如,可靠度是与残差的平方成反比的值。即,自动行进可能性信息计算单元109基于移动体的历史信息来计算移动体的位置/姿势测量的可靠度。
此外,基于从移动体可以自动行进的区域中的拍摄图像检测到的图像特征与从用于计算位置/姿势的历史信息的拍摄图像检测到的多个图像特征之间的一致度来计算可靠度。由此,根据第一实施例,可以显示能够可靠地测量位置和姿势的路径的位置和方向。
虽然以上假设障碍物布置信息是图像,但其仅需要指示障碍物的布置,并且不限于图像。例如,障碍物布置信息可以由三维点群或占据栅格地图(occupancy grid map)来表示。占据栅格地图是场景被划分成栅格单元且各栅格单元保持在网格单元中存在障碍物的概率的地图。
此外,只要能够表现位置/姿势的可靠度,任意事物都可以用作位置/姿势测量的可靠度。例如,当位置/姿势测量单元103测量位置/姿势时,可以基于在自动行进期间从拍摄图像检测到的图像特征的数量或图像特征的位置分布来计算位置/姿势测量的可靠度。可以判断为,特征点的数量越多或特征点的空间分布越广,可靠度就越高。相反,可以判断为,特征点的数量越少或特征点的空间分布越偏向,可靠度越低。如上所述,在第一实施例中,基于从用于计算位置/姿势的历史信息的拍摄图像检测到的图像特征的数量来计算移动体可以自动行进的区域。
在上述步骤S103中,可以测量位置/姿势的范围是圆形,但范围不限于圆形,并且可以是椭圆形或矩形等。此外,虽然上面已经描述了位置、方向、范围和可靠度全部显示的情况,但是可以显示方向以及位置和范围至少之一,或者可以仅显示位置和方向。可替代地,可以仅显示方向、范围和可靠度。在任意情况下,第一实施例的优点是移动体的路径设置非常容易。
第二实施例
在第一实施例中,可以将能够观察到用于位置/姿势测量的地图所保持的图像特征的照相机的位置范围设置为移动体可以自动行进的范围。即,在第二实施例中,首先,在用于位置/姿势测量的地图所保持的摄像时的照相机的位置附近,以预定间隔(L)设置虚拟照相机的多个位置。接下来,判断从虚拟照相机的各个设置位置是否能够观察到用于位置/姿势测量的地图所保持的图像特征。
具体地,基于用于位置/姿势测量的地图所保持的摄像时的照相机的位置和照相机的姿势,将用于位置/姿势测量的地图所保持的三维图像特征投影到二维图像平面上,并判断在投影图像中是否能够观察图像特征。当图像中的投影图像特征的位置在照相机的拍摄图像区域内、即在照相机的视角内时,判断为能够观察图像特征。
当被判断为能够观察的图像特征的数量等于或大于预设阈值时,以照相机的各个位置为中心且具有直径L的圆形区域被设置为移动体可以自动行进的范围。当被判断为能够观察的图像特征的数量小于阈值时,以照相机的各个位置为中心且具有直径L的圆形区域被设置为移动体不能自动行进的范围。
代替使用由位置/姿势历史获取单元获取的可靠度,可以基于通过上述方法计算出的能够观察的图像特征的数量和分布来计算包括在自动行进可能性信息中的可靠度。在该情况下,特征点的数量越多或特征点的分布越广,可靠度就越高。相反,特征点的数量越少或特征点的空间分布越偏向,可靠度越低。
第三实施例
虽然在第一实施例和第二实施例中计算移动体可以自动行进的位置的范围作为移动体可以自动行进的范围,但是在第三实施例中,计算移动体的以该姿势可以自动行进的姿势的范围作为移动体可以自动行进的范围,并将该范围显示在画面上。在计算方法中,首先,针对摄像时照相机的各个位置来设置虚拟照相机的多个姿势。
照相机的姿势由侧倾、俯仰和横摆来表现,并且以预定旋转角间隔(D)设置针对侧倾、俯仰和横摆的中的各个的多个旋转角。然后,针对各个所设置的姿势,使用第二实施例中描述的方法来判断用于位置/姿势测量的地图所保持的图像特征是否能够观察。当被判断为能够观察的图像特征的数量等于或大于预设阈值时,将以侧倾、俯仰和横摆中的各个的姿势为中心的旋转角范围-D/2至+D/2设置为移动体可以自动行进的姿势范围。当被判断为能够观察的图像特征的数量小于阈值时,将以侧倾、俯仰和横摆中的各个的姿势为中心的旋转角范围-D/2至+D/2设置为移动体不能自动行进的姿势范围。
姿势范围可以被限制在已经预先设置的预定范围内。在该情况下,以摄像时照相机的姿势为中心的预定姿势范围被设置为移动体可以自动行进的姿势范围。虽然在上面的描述中,将姿势范围计算为移动体可以自动行进的范围,但是可以将位置范围和姿势范围的对计算为移动体可以自动行进的范围。在该情况下,在第二实施例中描述的虚拟照相机的多个位置中的各个位置处计算第三实施例中描述的姿势范围。
图5是示出将示出自动行进可能性信息的CG图像叠加在障碍物布置图像上的图像的示例的图。即,图5示出了当将移动体可以自动行进的范围设置为位置和姿势的范围时、将示出自动行进可能性信息的CG图像叠加到在步骤S104中生成的障碍物布置图像的图像的示例。G401至G405表示与第一实施例中所描述的相同。G901表示在移动体可以自动行进的范围内用户经由输入单元215已经指定的位置。
G902表示指示移动体在点G901处可以自动行进的姿势范围的GUI。G903表示在侧倾、俯仰和横摆这三个旋转角中的用户经由输入单元215已经指定的两个(侧倾和横摆)旋转角。G904表示移动体以所指定的侧倾和横摆的旋转角可以自动行进的俯仰的范围。在GUIG902中,阴影线的浓度指示随着阴影线的浓度的增加而增加的可靠度。
第四实施例
在第四实施例中,基于自动行进可能性信息和障碍物布置信息,进一步搜索移动体可以自动行进所穿过的路径。假设路径的开始点、经过点(waypoint)和目的地点是由用户预定的位置。
图6是示出根据第四实施例的信息处理装置的示例性配置的功能框图。图6所示的一些功能框通过使信息处理装置中包括的计算机执行存储在作为存储介质的存储器中的计算机程序来实现。然而,一些或全部功能框也可以通过硬件实现。专用电路(ASIC)或处理器(诸如可重构处理器或DSP等)等可以用作硬件。
图6所示的功能框不必合并到相同的壳体中,并且信息处理装置可以由通过信号线彼此连接的分离的装置来构建。在图6中,信息处理装置200包括位置/姿势历史获取单元107、障碍物布置信息获取单元108、自动行进可能性信息计算单元109和路径搜索单元201,并且信息处理装置200连接到保持单元202。虽然图6中未示出,但是也可以在信息处理装置200中设置图1中的图像生成单元110和呈现单元111,并且呈现单元111可以经由图像生成单元110呈现路径搜索单元201找到的路径(显示该路径的图像)。
位置/姿势历史获取单元107获取位置/姿势历史。虽然在第一实施例中从位置/姿势测量单元103获取位置/姿势历史,但是在第四实施例中从保持单元202获取位置/姿势历史。与第一实施例中所描述的相同,位置/姿势历史与位置/姿势信息、位置/姿势可靠度信息和测量时间信息等的历史一起存储。
障碍物布置信息获取单元108获取障碍物布置信息。虽然在第一实施例中从障碍物布置信息生成单元106获取障碍物布置信息,但是在第四实施例中从保持单元202获取障碍物布置信息。与第一实施例中所描述的相同,障碍物布置信息是示出障碍物布置状态的障碍物布置图像。
自动行进可能性信息计算单元109与在第一实施例中描述的自动行进可能性信息计算单元相同。路径搜索单元201基于位置/姿势历史和障碍物布置信息来搜索移动体可以自动行进的路径。保持单元202保持位置/姿势测量历史和障碍物布置信息。
图7是示出根据第四实施例的处理过程的流程图。处理步骤包括初始化步骤S200、位置/姿势历史获取步骤S201、障碍物布置信息获取步骤S202、自动行进可能性信息计算(自主行进可能性信息获取)步骤S203和路径搜索步骤S204。图7中的各个处理步骤的操作由信息处理装置200中的计算机执行存储在存储器中的计算机程序来进行。下面将详细描述各个处理步骤。
在步骤S200中,进行初始化。具体地,读取由外部存储装置保持的位置偏差的容许量的设置值。在步骤S201中,位置/姿势历史获取单元107从保持单元202获取为生成用于移动体的位置/姿势测量的地图而计算出的位置/姿势、位置/姿势的可靠度和测量时间。
在步骤S202中,从保持单元202获取障碍物布置信息。在步骤S203中,获取(作为由移动体计算出的自动行进可能性信息的)移动体能够自动行进的位置、方向和范围及其可靠度。在步骤S204中,路径搜索单元201基于在步骤S202中获取的障碍物布置信息和在步骤S203中计算出的自动行进可能性信息,搜索移动体可以自动行进且预设了开始点、经过点和目的地点的路径。这里,步骤S204用作用于基于自动行进可能性信息和障碍物布置信息来搜索移动体的行进路径的路径搜索单元(路径搜索步骤)。
在搜索方法中,例如,首先,针对要通过的各个点,从开始点、经过点群和目的地点中按照经过的顺序逐一选择与要通过的点相邻的点对,并且搜索在连接点对的区间中移动体可以自动行进的路径。使用已知的算法,例如A-star算法来进行搜索。A-star算法是利用节点来表现路径并搜索从开始点到目的地点的最短路径的算法。
在第四实施例中,将障碍物布置图像划分为多个栅格单元,并且将各个栅格单元视为节点。各个节点处的前进方向被限制为在上、下、左、右、斜右上、斜右下、斜左上和斜左下这八个方向中的接近移动体可以自动行进的方向的两个方向。将各自包括障碍物或移动体不能自动行进的区域的栅格单元设置为移动体不能前进的栅格单元。然后,通过连接点对之间的路径,搜索被限制到移动体可以自动行进的区域和方向的从开始点通过经过点并到达目的地点的路径。
图8是示出根据第四实施例的路径搜索结果的示例的图。图8中的黑色箭头指示通过搜索而获得的路径,并且各个箭头的背景中的阴影线指示移动体可以自动行进的范围。因而,作为显示控制单元的呈现单元111控制地图图像和移动体的行进路径的显示。可以在不进行显示的情况下基于找到的路径直接控制移动体100的移动方向和移动量。通过进行上述方法,可以设置能够可靠地测量位置/姿势的路径。
虽然在上述描述中将A-star算法应用于路径搜索,但是只要能够从预设开始点到预设目的地点搜索移动体可以自动行进的路径就足够了,并且例如可以应用诸如Dijkstra方法等的其他路径搜索方法。上面还描述了对开始点、经过点和目的地点进行预先设置并对从开始点通过经过点到目的地点的路径进行搜索的方法。然而,也可以在不设置经过点的情况下搜索从开始点到目的地点的路径。
虽然已经在上面描述了对开始点、经过点和目的地点进行预先设置并对从开始点通过经过点到目的地点的路径进行搜索的方法,但是也可以设置指示近似地点而非点的区域。在该情况下,可以将在设置区域内且移动体可以自动行进的范围内的预定位置(例如,自动行进可能性信息中包括的可靠度最高的位置)设置为点,并且可以使用第四实施例中描述的方法来搜索路径。
此外,在第四实施例中,用户可以基于自动行进可能性信息和障碍物布置信息,手动输入并设置移动体可以自动行进的路径。具体地,在步骤204中,用户参考叠加了示出自动行进可能性信息的CG图像的障碍物布置图像,并且经由输入单元215输入经过点和经过的顺序。因此,可以设置从预定开始点起按照经过的顺序通过所输入的经过点而到达预定目的地点的路径。
此外,例如,当用户已经输入了具有与移动体可以自动行进的位置或方向不对应的经过点和经过的顺序时,可以通知用户“这些不是移动体可以自动行进的位置或方向”。与经过点相同地,用户可以经由输入单元215输入开始点和目的地点。
可以仅基于自动行进可能性信息来搜索移动体可以自动行进的路径。具体地,在步骤204中,仅将各自包括移动体不能自动行进的区域的栅格单元设置为移动体不能前进的栅格单元。这使得能够仅基于自动行进可能性信息来搜索移动体可以自动行进的路径。
除了自动行进可能性信息和障碍物布置信息之外,还可以基于针对路径的搜索条件来搜索移动体可以自动行进的路径。具体地,将可靠度阈值设置为搜索条件,并且搜索具有比阈值更高的可靠度的路径。这使得能够搜索能够更可靠地进行位置/姿势测量的路径。
例如,图6的路径搜索单元201基于自动行进可能性信息和障碍物布置信息来搜索移动体可以自动行进的路径,并且还基于作为搜索条件的预定可靠度来搜索路径。
然后,在图7的步骤S204中,基于在步骤S202中获取的障碍物布置信息、在步骤S203中计算出的自动行进可能性信息以及作为搜索条件的可靠度阈值,搜索移动体可以自动行进的路径。假设障碍物布置信息是图像(障碍物布置图像)。即,首先,针对要通过的各个点,从开始点、经过点群和目的地点中按照经过的顺序逐一选择与要通过的点相邻的点对,并且对在连接点对的区间中移动体可以自动行进的所有路径进行搜索。例如,使用被称为广度优先搜索(Breadth-first search)的现有方法作为全搜索方法。
这里,将障碍物布置图像划分为多个栅格单元,并且各个栅格单元被视为节点,对包括点的节点之间的所有路径进行搜索。各个节点处的前进方向被限制为在上、下、左、右、斜右上、斜右下、斜左上和斜左下这八个方向中的接近移动体可以自动行进的方向的两个方向。此外,不仅将各自包括障碍物或移动体不能自动行进的区域的栅格单元设置为移动体不能前进的区域,而且还将可靠度比预定阈值更低的区域设置为移动体不能前进的区域。
然后,通过连接点对之间的路径,搜索从开始点通过经过点并到达目的地点的路径,该路径限于移动体可以自动行进的区域和方向,并且可靠度高于预定阈值。通过这样做,可以搜索从开始点通过经过点并到达目的地点的路径,该路径限于移动体可以自动行进并且可靠度高于阈值的区域和方向。
在上述路径搜索步骤S204中描述的路径搜索中,如果不存在满足搜索条件的路径,则可以提供该事实的通知。即,可以设置通知单元以在不存在移动体可以自动行进的路径的情况下通知用户。虽然上面已经描述了对移动体可以自动行进的通过可靠度高于阈值的位置的路径进行搜索的方法,但是也可以搜索移动体能够以高于阈值的平均可靠度自动行进的路径。
在该情况下,假设仅将各自包括障碍物或移动体不能自动行进的区域的栅格单元作为移动体不能前进的栅格单元,对路径进行搜索,并且基于各个路径上的可靠度值来获得平均可靠度。然后,提取平均可靠度比可靠度阈值更高的路径,作为移动体可以自动行进的并且具有比阈值更高的可靠度的路径。
第五实施例
在上述实施例的步骤S204中,已经描述了对从开始点通过经过点并到达目的地点的路径进行搜索的方法,该路径限于移动体可以自动行进的区域和方向。在第五实施例中,对从开始点通过经过点并到达目的地点而不限于移动体可以自动行进的区域和方向的多个路径进行搜索,并从多个找到的路径中选择限于移动体可以自动行进的区域和方向的路径。下面,将描述第五实施例中的步骤S204的处理。
在步骤S204中,首先,对从开始点通过经过点并到达目的地点而不限于移动体可以自动行进的区域和方向的多个路径进行搜索。具体地,假设各个节点处的前进方向是上、下、左、右、斜右上、斜右下、斜左上和斜左下这八个方向,进行与第二实施例和第三实施例的步骤S204中相同的处理。然后,从多个找到的路径中选择限于移动体可以自动行进的区域和方向的路径。由此,路径搜索单元201可以基于自动行进可能性信息、障碍物布置信息和自动行进可能性信息的可靠度,搜索或选择移动体可以自动行进的路径。
此外,在上述实施例中,可以允许用户任意设置路径,然后可以基于自动行进可能性信息来校正预先已任意设置的移动体的路径,使得该路径成为移动体可以自动行进的路径。即,首先,检查由用户任意设置的路径的开始点和目的地点是否在移动体可以自动行进的范围内,如果开始点和目的地点在范围外,则移动开始点和目的地点以使开始点和目的地点落入范围内。例如,将各个点移动到点与范围的边界线之间的距离最小的该边界线上的位置。
接下来,进行与图7的步骤204中相同的处理以搜索限于移动体可以自动行进的区域和方向的、从开始点到达目的地点的路径。接下来,从找到的路径中提取经过用户任意设置的路径附近的路径。具体地,提取通过搜索找到的路径,其中该路径从其路径线到由用户任意设置的路径的经过点的距离在预定范围内。提取出的路径可以被确定为校正后的路径。
图1的AMR(自主行进机器人装置)具有用于使AMR移动(行进)的诸如马达和发动机等的驱动装置以及用于改变AMR的移动方向的移动方向控制装置。AMR还具有用于控制驱动装置的驱动量和移动方向控制装置的移动方向的移动控制单元。
移动控制单元在内部包括作为计算机的CPU和存储计算机程序的存储器,并通过与其他装置进行通信来控制例如信息处理装置101,并且从信息处理装置101获取位置/姿势信息和行进路径信息等。AMR被配置成基于由信息处理装置101找到的行进路径通过移动控制单元来控制AMR的移动方向、移动量和移动路径。此外,上述实施例中的单元可以包括离散的电子电路,或者一些或全部单元可以由诸如FPGA或CPU等的处理器或计算机程序来构建。
虽然参照示例性实施例描述了本发明,但是应当理解,本发明不限于所公开的示例性实施例。所附权利要求的范围将被给予最广泛的解释,以涵盖所有这样的修改和等效结构和功能。此外,作为根据实施例的控制的一部分或全部,可以通过网络或各种存储介质将实现上述实施例的功能的计算机程序供给至信息处理装置。然后,信息处理装置的计算机(或CPU或MPU等)可以被配置为读取和执行程序。在这样的情况下,程序和存储该程序的存储介质配置了本发明。
本申请要求2021年7月29日提交的日本专利申请2021-124647的优先权,该申请通过引用整体并入本文。
- 信息处理装置、信息处理装置中的方法和存储介质
- 信息处理装置、信息处理装置的控制方法和存储介质
- 电能计量装置的信息处理方法、装置、终端及存储介质
- 图案形成装置、决定方法、存储介质与信息处理装置
- 信息处理装置、存储介质及信息处理方法
- 一种自主行进式集装箱盒装货物自动抓取卸货装置、方法及存储介质
- 机器人行进路线调整方法、装置、机器人和存储介质