一种万向轮及装有该万向轮的叉臂和车辆搬运机器人
文献发布时间:2023-06-19 09:23:00
技术领域
本发明属于万向轮技术领域,涉及一种用于车辆搬运机器人的万向轮、装有该万向轮的 叉臂和车辆搬运机器人。
背景技术
随着工业、物流系统的迅速发展,机器人的应用范围也在不断扩展,体积和结构也趋于多 样化发展。其中,车辆搬运机器人能够更有效的利用停车场的空间,节省车辆驾驶员寻找停 车位和寻找车辆的时间,是解决城市停车难的有效手段之一,也能够提高人们的时间利用效 率。将叉臂伸入到车辆底部,通过叉臂向车轮施加水平挤压力,最终托起车辆并带着车辆向 目的地移动,这是叉臂式车辆搬运机器人的工作流程。其叉臂需要伸入到车底空间,并托起 车辆的车轮,因此,叉臂的工作环境是非常低的,而且越低越容易托起车辆。为了带着车辆 移动,并保持整体平衡,叉臂上需要安装轮子,并且是能够主动控制方向、承载较高的万向 轮。但是,传统脚轮安装高度是轮子高度的1.5~2.5倍,不利于叉臂降低高度,某些适用于 低空间的万向轮不具备主动控制方向的能力或承载能力不足。
发明内容
鉴于现有技术中存在上述技术问题,本发明的目的在于提供一种能够有效降低车体高度 的车辆搬运机器人用的万向轮,其可以通过电机带动转向结构,使其具有主动控制滚动方向 的能力,还能够承受高负载的压力。本发明的目的还在于提供安装有上述万向轮的叉臂和车 辆搬运机器人。本发明采用的技术方案如下所述:
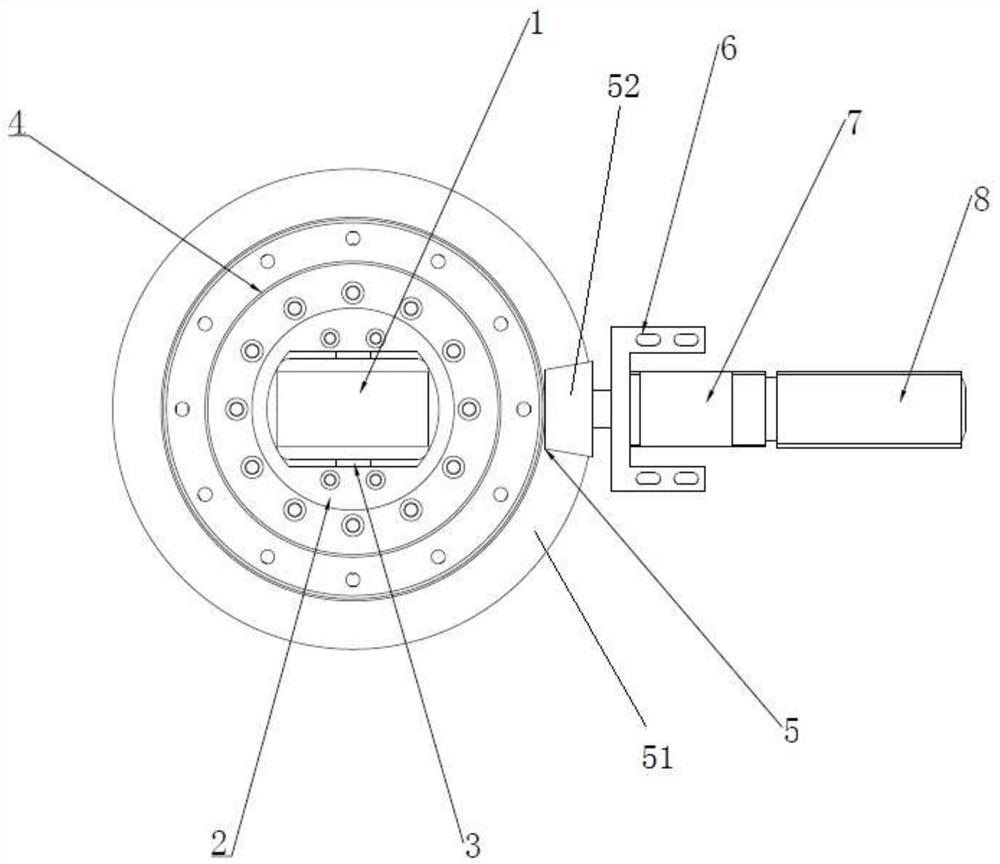
本发明提供一种万向轮,所述万向轮包括轮子1、轮毂2、轮轴3、旋转体4、锥齿轮组5和电机8。所述轮子1安装在轮轴3上,所述轮轴3安装在轮毂2内,所述轮毂2位于旋转 体4的中心孔内。所述锥齿轮组5包括水平放置的环状齿轮51和由电机8驱动的小齿轮52。 所述旋转体4的内圈和环状齿轮51内侧分别于轮毂2固定连接。
进一步地,所述旋转体为交叉滚子轴承。
进一步地,所述电机8通过减速器7驱动小齿轮52。
进一步地,所述电机8安装在电机固定架6上。
进一步地,所述锥齿轮组5为弧齿螺旋锥齿轮。
进一步地,所述小齿轮52的中心轴与环状齿轮51的中心轴的夹角为90°。
进一步地,所述轮轴3通过固定块9固定安装在轮毂2内。
在上述万向轮使用时,所述旋转体4的外圈固定安装在设备的底座上。电机8未启动时, 旋转体4的内圈与外圈相对静止,万向轮不能随意转动。当电机8启动,且电机8带动小齿 轮52转动,小齿轮52带动环状齿轮51转动角度α时,环状齿轮51带动旋转体4的内圈和轮毂2转动角度α,而旋转体4的外圈由于固定在设备底座上,不会发生转动。其中,角度 α的范围是0°≤α≤360°。并且,调整电机8的速率和运行时间可以随意控制α的大小, 实现任意方向转动轮子的滚动方向的目的。
本发明还提供一种车辆搬运机器人用叉臂,所述叉臂安装有上述万向轮。
本发明还提供一种车辆搬运机器人,所述车辆搬运机器人安装有上述叉臂或万向轮。
本发明具有以下有益效果:
1、本发明万向轮结构采用新型结构,安装高度低,可直接安装在车辆搬运机器人的叉臂 上,降低叉臂安装高度,简化结构,从而降低车辆搬运机器人整体高度。
2、交叉滚子轴承和锥齿轮组具有高承载的优点,能够承载器车辆搬运机器人搬运车辆时 的重量,不容易损坏,提高了万向轮的使用寿命。
3、通过电机驱动,能够通过控制电机的转动速率、运行时间等控制万向轮的滚动方向, 保证车辆搬运机器人在运行过程中不会因轮子滚动方向不一致引起颠簸而造成车辆掉落的问 题。
附图说明
图1为本发明的实施例中万向轮的结构示意图;
图2为本发明的实施例中万向轮的剖视图;
图3为本发明的实施例中叉臂的结构示意图;
图4为本发明的实施例1中车辆搬运机器人的结构示意图;
图5为本发明的实施例2中车辆搬运机器人的结构示意图;
其中,1为轮子,2为轮毂,3为轮轴,4为旋转体,5为锥齿轮组,51为环状齿轮,52 为小齿轮,6为电机固定架,7为减速器,8为电机,9为固定块。
具体实施方式
为了更清楚地说明本发明的技术方案,下面将结合具体实施例和附图进行说明,显而易 见地,下面描述中的实施例仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不 付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
实施例1
如图1和2所示,本实施例所述万向轮包括轮子1、轮毂2、轮轴3、旋转体4、锥齿轮组5和电机8。所述轮子1安装在轮轴3上,所述轮轴3安装在轮毂2内。所述锥齿轮组5 包括水平放置的环状齿轮51和由电机8驱动的小齿轮52。所述轮毂2位于旋转体4的中心 孔内,且轮毂2和旋转体4的内圈固定连接在环状齿轮51内侧。所述旋转体4为交叉滚子轴 承。所述电机8通过减速器7驱动小齿轮52,并安装在电机固定架6上。所述锥刺轮组为弧 齿螺旋锥齿轮。所述小齿轮52的中心轴与环状齿轮51的中心轴的夹角为90°。所述轮轴3 通过固定块9固定安装在轮毂2内。
在上述万向轮使用时,所述旋转体4的外圈固定安装在设备的底座上。电机8未启动时, 旋转体4的内圈与外圈相对静止,万向轮不能随意转动。当电机8启动,且电机8带动小齿 轮52转动,小齿轮52带动环状齿轮51转动角度α时,环状齿轮51带动旋转体4的内圈和轮毂2转动角度α,而旋转体4的外圈由于固定在设备底座上,不会发生转动。其中,角度 α的范围是0°≤α≤360°。并且,调整电机8的速率和运行时间可以随意控制α的大小, 实现任意方向转动轮子的滚动方向的目的。
如图3所示,本实施例所述车辆搬运机器人用叉臂,所述叉臂安装有上述万向轮。
如图4所示,本实施例所述车辆搬运机器人,所述车辆搬运机器人安装有上述叉臂或万 向轮。
实施例2
如图1和图2所示,本实施例中的万向轮与实施例1中万向轮具有相同的结构。
如图3所示,本实施例所述车辆搬运机器人用叉臂,所述叉臂安装有上述万向轮。
如图5所示,本实施例所述车辆搬运机器人,所述车辆搬运机器人安装有上述叉臂或万 向轮。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些 实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理 可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被 限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的 范围。