一种介入二尖瓣膜输送系统定位装置
文献发布时间:2023-06-19 09:24:30
技术领域
本申请涉及医疗器械技术领域,尤其涉及一种介入二尖瓣膜输送系统定位装置。
背景技术
人体的二尖瓣膜原生结构是类马鞍形的不规则椭圆形,其前环比后环高,不在同一平面上。此种特殊的生理结构导致在进行经导管二尖瓣置换手术时,用于置换的瓣膜在释放过程中需要尽可能去匹配原生二尖瓣膜的结构而存在一个天然的倾斜角度,若是用于置换的人工瓣膜不能和原生结构很好的匹配,就容易出现瓣膜固定不住、瓣周漏等问题从而导致手术失败。而现有的技术中,此倾斜角度往往需要依靠术者的经验,配合体外影像等手段来控制,导致经导管二尖瓣置换手术难度高,对于术者的手术经验和体力也是很大挑战。
发明内容
本申请提供了一种介入二尖瓣膜输送系统定位装置,用于在手术过程中,方便医生对介入二尖瓣膜系统进行定位。
本申请实施例提供了一种介入二尖瓣膜输送系统定位装置,所述定位装置包括:
基座;
固定座,所述固定座用于安装介入二尖瓣膜输送系统;
调整座,所述调整座包括第一调节装置,所述固定座通过所述第一调节装置安装于所述基座;
所述第一调节装置用于改变所述固定座与所述基座的相对位置。
在一种可能的实施方式中,所述第一调节装置包括第一连接部、第二连接部和第一测量装置。
沿所述定位装置的长度方向,所述固定座的相对两端分别通过所述第一连接部和所述第二连接部与所述基座连接,所述第一连接部和/或所述第二连接部为可伸缩结构,所述第一测量装置用于测量所述固定座的角度位置。
在一种可能的实施方式中,所述第一连接部与所述第二连接部分别沿所述定位装置的高度方向延伸,所述固定座能够相对于所述第一连接部转动,所述第二连接部为可伸缩结构,所述第一测量装置安装于所述固定座;
当所述第二连接部的长度改变时,所述固定座与所述基座之间的夹角也随之改变。
在一种可能的实施方式中,所述固定座通过连接杆与所述第二连接部连接,且所述固定座能够相对于所述连接杆运动。
在一种可能的实施方式中,所述第一连接部和所述第二连接部中,为可伸缩结构的一者或二者设置有无级变速装置。
在一种可能的实施方式中,所述固定座能够围绕所述第一连接部的轴线或所述第二连接部的轴线转动。
在一种可能的实施方式中,所述调整座还包括第二调节装置,所述第二调节装置包括驱动部和第二测量装置,所述驱动部与所述固定座连接,用于驱动所述固定座相对于自身轴线转动;
所述第二测量装置用于测量所述固定座的转动角度。
在一种可能的实施方式中,所述基座设置有滑轨,所述固定座安装于所述滑轨,且能够沿所述滑轨相对于所述基座运动。
在一种可能的实施方式中,所述固定座包括至少一个夹持部,所述夹持部用于夹持介入二尖瓣膜输送系统。
本申请实施例提供了一种介入二尖瓣膜输送系统定位装置,其中,介入二尖瓣膜输送系统定位装置包括基座、调整座和第一调节装置,调整座用于安装介入二尖瓣膜输送系统,调整座通过第一调节装置安装于定位装置,通过第一调节装置可以改变固定座与基座的相对位置,从而达到对介入二尖瓣膜输送系统定位的目的。通过这样的方式不仅便于对介入二尖瓣膜输送系统进行定位,同时还能够提升定位的准确性,降低瓣膜置换手术的风险。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
附图说明
图1为本申请所提供的介入二尖瓣膜输送系统定位装置的一种实施例的结构示意图;
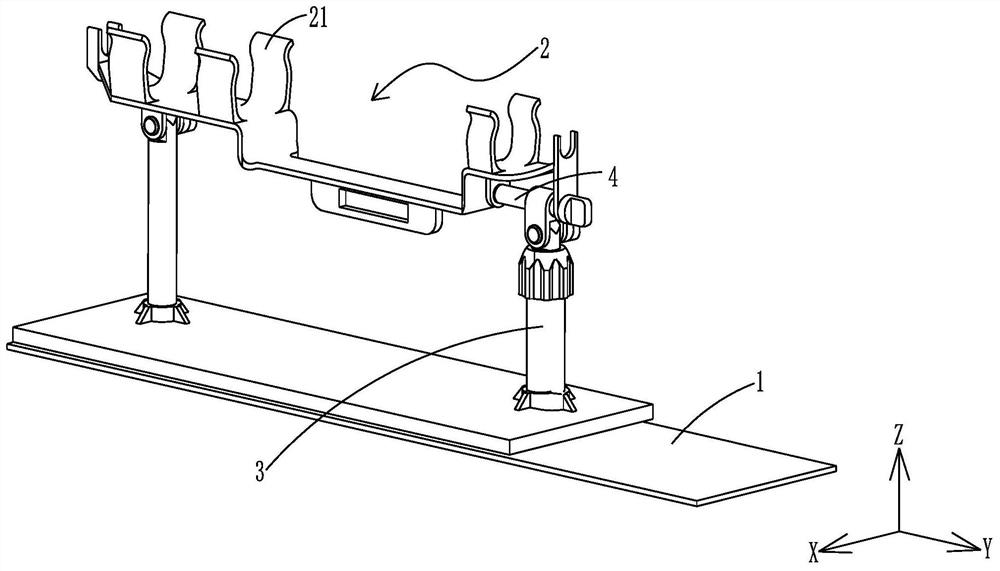
图2为本申请所提供的介入二尖瓣膜输送系统定位装置的另一实施例的结构示意图;
图3为图2的爆炸图。
附图标记:
1-基座;
11-滑轨;
2-固定座;
21-夹持部;
3-调整座;
31-第一调节装置;
311-第一连接部;
312-第二连接部;
312a-第一连接段;
312b-第二连接段;
313-第一测量装置;
314-无级变速装置;
4-连接杆;
5-导向部。
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
具体实施方式
为了更好的理解本申请的技术方案,下面结合附图对本申请实施例进行详细描述。
应当明确,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本申请保护的范围。
在本申请实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。在本申请实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
应当理解,本文中使用的术语“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
需要注意的是,本申请实施例所描述的“上”、“下”、“左”、“右”等方位词是以附图所示的角度来进行描述的,不应理解为对本申请实施例的限定。此外,在上下文中,还需要理解的是,当提到一个元件连接在另一个元件“上”或者“下”时,其不仅能够直接连接在另一个元件“上”或者“下”,也可以通过中间元件间接连接在另一个元件“上”或者“下”。
人体的二尖瓣膜原生结构是类马鞍形的不规则椭圆形,其前环比后环高,不在同一平面上。此种特殊的生理结构导致在进行经导管二尖瓣置换手术时,用于置换的瓣膜在释放过程中需要尽可能去匹配原生二尖瓣膜的结构而存在一个天然的倾斜角度,若是用于置换的人工瓣膜不能和原生结构很好的匹配,就容易出现瓣膜固定不住、瓣周漏等问题从而导致手术失败。而现有的技术中,此倾斜角度往往需要依靠术者的经验,配合体外影像等手段来控制,导致经导管二尖瓣置换手术难度高,对于术者的手术经验和体力也是很大挑战。
鉴于此,本申请实施例提供了一种介入二尖瓣膜输送系统定位装置,用于解决现有技术中,对于介入二尖瓣膜系统定位不便的问题。
如图1和图2所示,本申请实施例提供了一种介入二尖瓣膜输送系统的定位装置,该定位装置包括基座1、固定座2和调整座3,调整座3包括第一调节装置31,固定座2通过第一调节装置31安装于基座1,第一调节装置31能够驱动固定座2相对于基座1运动,当介入二尖瓣膜输送系统安装于固定座2时,可以通过第一调节装置31改变固定座2相对于基座1的位置,从而对介入二尖瓣膜输送系统进行定位,以使介入二尖瓣膜输送系统能够到达预设的位置。
相较于医生凭借手感和经验对介入二尖瓣膜输送系统进行定位的方式,通过本申请实施例所提供的定位装置可以实现对介入二尖瓣膜输送系统进行较为精准的定位,通过第一调节装置31以改变固定座2相对于基座1的位置,从而改变介入二尖瓣膜输送系统的位置,便于对介入二尖瓣膜输送系统进行定位。在实际使用时,更加方便,同时还能够降低对医生的操作技术以及熟练度的要求,降低手术风险。
如图2所示,在一种可能的实施方式中,第一调节装置31包括第一连接部311、第二连接部312和第一测量装置313,沿定位装置的长度方向,固定座2的相对两端分别通过第一连接部311和第二连接部312与基座1连接,第一连接部311和第二连接部312中的任意一者或两者,为可伸缩结构,第一测量装置313用于测量固定座2的位置。
具体地,在实际使用时,可以通过调节第一连接部311和/或第二连接部312的长度,以使固定座2的位置发生变化,从而达到调节介入二尖瓣膜输送系统位置的目的,从而使介入二尖瓣膜输送系统处于预设位置,节省定位介入二尖瓣膜输送系统所需的时间。
第一连接部311和第二连接部312为可伸缩结构,这样的设计具有结构简单,便于操作优点,第一测量装置313为角度显示装置,具体可以为水平角度仪,具体地,可以为液体气泡式水平仪、激光水平仪等。第一测量装置313可以用于测量固定座2的当前角度,进而测量出介入二尖瓣膜输送系统的倾斜角度。
如图2所示,在一种可能的实施方式中,第一连接部311和第二连接部312沿定位装置的高度方向延伸。固定座2与第一连接部311之间具有预设的夹角,且安装之间能够相对于第一连接部311转动,以改变安装之间与第一连接部311之间的夹角。第二连接部312为可伸缩结构,第一测量装置313安装于固定座2。在实际使用时,可以通过调节第二连接部312以使固定座2的一端的位置发生变化,与此同时,由于固定座2与第二连接部312连接的一端的位置发生变化,因此固定座2会相对于第一连接部311转动,从而改变介入二尖瓣膜输送系统的与基座1之间的夹角(即介入二尖瓣膜输送系统的倾斜角度),从而使介入二尖瓣膜输送系统呈预设的角度。具体的倾斜角度可以通过水平角度仪进行测量。
通过这样的设计能够较为便捷的对介入二尖瓣膜输送系统的倾斜角度进行调整,以使介入二尖瓣膜输送系统处于预设的切入角度,在实际使用时,医生可以较为便捷、精准的对介入二尖瓣膜输送系统进行调节,从而便于医生对介入二尖瓣膜输送系统进行定位。
具体地,如图3所示,第二连接部312可以包括第一连接段312a和第二连接段312b,第一连接段312a和第二连接段312b滑动连接,在一种可能的实施方式中,第一连接段312a与第二连接段312b套接,这样的设计不仅使第二连接部312为可伸缩结构,同时套接的方式还能够对第一连接部311和第二连接部312相对运动的时候进行导向,提升第二连接部312在进行伸缩变化时,第一连接部311和第二连接部312相对运动的稳定性。
如图2所示,在一种可能的实施方式中,该定位装置还包括连接杆4,固定座2通过连接杆4与第二连接部312连接,且固定座2能够相对于连接杆4运动。
由于在第二连接部312的进行伸缩变化的过程中,第一连接部311与固定座2连接的端部与第二连接部312与安装之间连接的端部之间的距离会发生变化,当第二连接部312伸长时,该距离会增加,容易导致固定座2与第一连接部311或第二连接部312脱离,通过在固定座2与第二连接部312之间增设连接杆4,可以用于提升固定座2与第二连接部312连接的稳定性,当第二连接部312伸长时,所述第二连接部312的长度变化,固定座2靠近第二连接部312的一端沿连接杆4朝向远离第二连接部312的方向运动,连接杆4能够用于补足第一连接部311与固定座2相连的一端和第二连接部312与安装之间相邻的一端之间的距离变化,从而降低固定座2从第二连接部312脱落的可能。
如图3所示,在一种可能的实施方式中,第一连接部311和/或第二连接部312具有无级变速装置314。
无级变速装置314具有传动效率高,传动准确度高的优点,更加符合实际需求。具体地,无级变速装置可以设置在第一连接部311和第二连接部312中为可伸缩结构的一者或两者,从而提升调节的准确性。
在一种可能的实施方式中,该调整座3还包括第二调节装置,第二连接装置与固定座2连接,用于驱动固定座2相对于自身轴线转动。
通过这样的设计能够更加便于对介入二尖瓣膜输送系统进行定位,不仅能够改变瓣膜输入装置与基座1的空间位置,还能够改变介入瓣膜与基座1的相对位置,更加便于医生对介入二尖瓣膜输送系统进行定位,提高定位的精准度。
在一种可能的实施方式中,固定座2能够围绕第一连接部311的轴线或第二连接部312的轴线转动。
通过这样的设计能够进一步改变介入二尖瓣膜输送系统与基座1之间的相对位置,便于医生对介入二尖瓣膜输送系统进行定位。定位装置还可以设置有第二测量装置,第二测量装置用于测量固定座的旋转角度。
如图3所示,在一种可能的实施方式中,基座1设置有滑轨11,固定座2安装于滑轨11,且固定座2能够沿滑轨11相对于固定座2运动。
通过这样的设计能够便于医生对介入二尖瓣膜输送系统的位置进行调整。具体地,如图3所示,该定位装置还可以包括导向部5,固定座2与导向部5连接,且能够沿导向部5运动,当固定座2沿滑轨11运动时,导向部5能够对固定座2的运动进行导向,提升固定座2运动的稳定性。
如图3所示,在一种可能的实施方式中,固定座2包括至少一个夹持部21,夹持部21用于夹持介入二尖瓣膜输送系统。
通过这样的方式能够提升介入二尖瓣膜输送系统与固定座2连接的稳定性,进而提升介入瓣膜安装之间的定位精准度。
本申请实施例提供了一种介入二尖瓣膜输送系统的定位装置,其中,介入二尖瓣膜输送系统的定位装置包括基座1、调整座3和第一调节装置31,调整座3用于安装介入二尖瓣膜输送系统,调整座3通过第一调节装置31安装于定位装置,通过第一调节装置31可以改变固定座2与基座1的相对位置,从而达到对介入二尖瓣膜输送系统定位的目的。通过这样的方式不仅便于对介入二尖瓣膜输送系统进行定位,同时还能够提升定位的准确性,降低瓣膜置换手术的风险。
以上所述仅为本申请的优选实施例而已,并不用于限制本申请,同时,本申请所述的介入二尖瓣膜输送系统定位装置,也同样能够适用于其他有特殊操作角度要求的瓣膜置换手术。
对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 一种介入二尖瓣膜输送系统定位装置
- 二尖瓣介入瓣膜及输送系统