一种全自主移动机器人控制的农药喷洒装置及使用方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及农业用具技术领域,尤其涉及一种全自主移动机器人控制的农药喷洒装置及使用方法。
背景技术
我国是一个农业大国,以占世界 7%的耕地要养活占世界 21%的人口,压力巨大,而传统农业机械在山地丘陵小地块,表现极不好,山地丘陵小地块耕地环境特点,造就了传统农业机械效率低还费人工这一事实,这也加速了大量农村劳动力逃离,大量山地丘陵地区可用耕地荒废,留下来的人们也就更加贫困,为了减少劳动量,提高农业种植的自动化程度和效率,在农药喷洒方面已经开始向自动化方向发展。
常见的无人机喷洒农药在使用过程中存在以下缺点 1、小型作物可以使用无人飞机来完成,但对于山地丘陵地区大型灌木就难以胜任,比如果园喷洒农药需要上下同时喷药,无人飞机难以胜任;而使用传统地面喷洒车进行农药喷洒,人则必须跟随驾驶,飞溅的农药会对人员造成极大的伤害和浪费,既不省人工,也不安全,为此,我们提出一种全自主移动机器人控制的农药喷洒装置及使用方法。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种全自主移动机器人控制的农药喷洒装置及使用方法,其自驱动轮控制器控制器驱动轮转动带动机体进行移动,高压力水泵将药液箱内部药液加压后抽出并经过喷杆排放,控制站用于设定参数,远程记录作业状态和紧急停机,控制系统采用光电距离传感器、GPS 和机器视觉三种方式引导机器移动作业,机器视觉采用卷积神经网络实现,决策核心采用模糊控制以及深度学习技术实现,通过计算机内。
部神经网络视觉程序控制,机器人,实现果园全流程无人喷药作业,通过预设参数可以对机器的移动范围和移动路径进行控制,进而控制农药喷洒范围,喷洒后机器可以自主返回或者遥控返回,返回后,程序开始做数据保存及分析, 记录作业各种参数,以便下次可以不用设定作业目标就可以重复作业,深度自主学习功能使得机器可以逐渐完成真正意义上的自主作业,大大提高了机器的智能化程度,采用机器视觉等多种引导移动作业方式,会使机器更能适应山区复杂地形作业,实现对大型灌木或果园的喷洒作业,节省人工并减少喷药过程对人体的损伤。
本发明提供的具体技术方案如下:
本发明提供的一种全自主移动机器人控制的农药喷洒装置及使用方法,包括轮式全地形机器人构架、控制站和控制系统,所述轮式全地形机器人构架由车头箱和药液箱组成且呈火车串联状,所述车头箱与药液箱之间配合连接有反馈联轴器并通过反馈联轴器相连接,所述车头箱和药液箱两侧底部均安装有自驱动轮且自驱动轮为两个,所述车头箱和药液箱表面均安装有 A 复合光电传感器模块,所述车头箱前下部安装有 C 复合光电传感器模块,所述车头箱顶部中间位置安装有喷杆,所述车头箱顶部靠近药液箱一侧安装有检修盖,所述车头箱内部安装有控制器模块、自驱动轮控制器和电池模块,所述药液箱顶部安装有高压力水泵,所述高压力水泵出水端安装有出水管并通过出水管与喷杆相连接,所述药液箱底部可拆卸连接有卡盖,所述药液箱和车头箱外侧壁均安装有B 复合光电传感器模块。
优选的,所述车头箱和药液箱底部均安装有轮轴,所述自驱动轮之间通过轮轴相连接。
优选的,所述车头箱顶部中间位置固定连接有喷杆支座,所述车头箱通过喷杆支座与喷杆相连接。
优选的,所述B 复合光电传感器模块和C 复合光电传感器模块内部均镶嵌有无线电天线和光电测距传感器。
优选的,所述 A 复合光电传感器模块内部镶嵌有无线电天线和光学成像传感器。
优选的,所述控制站用于设定参数,远程记录作业状态和紧急停机,所述控制系统采用光电距离传感器、GPS 和机器视觉三种方式引导机器移动作业, 所述机器视觉采用卷积神经网络实现,决策核心采用模糊控制以及深度学习技术实现。
优选的,所述的一种全自主移动机器人控制的农药喷洒装置具体使用方法操作包含如下步骤:
S1、开机:使用容器配置药液,配置完成后转移到药液箱内部,系统开机, 程序初始化,A 复合光电传感器模块、B 复合光电传感器模块和C 复合光电传感器模块开机自检,自驱动轮自检,机器自身电子陀螺仪初始化,GPS 信号状态自检,机器视觉自检,确定所在环境各种参数。
S2、预设目标:通过控制站对机器人的作业区域以及大致的移动路径进行设定。
S3、正式作业:机器人通过 A 复合光电传感器模块、B 复合光电传感器模块和C复合光电传感器模块感知周围环境,以调整左右距离和左右方向,开启高压力水泵,电池模块为高压力水泵供电运转,高压力水泵运转通过出水管将药液箱内部药液排出至喷杆内部并喷出,自驱动轮控制器运转控制自驱动轮转动以驱使机体进行移动,移动过程中喷杆进行喷洒作业,当作业过程中遇到设备异常以及环境条件超出设计范围,如移动路径上出现不能逾越和绕开的大坑等状况时,机器会自动停机报警。
S4、结束作业:当预设范围或路径行驶完整后,机器人可以自主返回或遥控返回,返回后进行关机,程序开始做数据保存及分析,记录此次作业的各种参数,包括GPS 位置参数以及移动路径的环境参数等,以便下次可以不用设定作业目标就可以重复作业,且机器人会调用之前的作业数据进行完善本次作业动作,逐渐完成真正意义上的自主作业。
本发明的有益效果如下:
本发明其自驱动轮控制器控制器驱动轮转动带动机体进行移动,高压力水泵将药液箱内部药液加压后抽出并经过喷杆排放,控制站用于设定参数,远程记录作业状态和紧急停机,控制系统采用光电距离传感器、GPS 和机器视觉三种方式引导机器移动作业,机器视觉采用卷积神经网络实现,决策核心采用模糊控制以及深度学习技术实现,通过计算机内部神经网络视觉程序控制,机器人,实现果园全流程无人喷药作业,通过预设参数可以对机器的移动范围和移动路径进行控制,进而控制农药喷洒范围,喷洒后机器可以自主返回或者遥控返回,返回后,程序开始做数据保存及分析,记录作业各种参数,以便下次可以不用设定作业目标就可以重复作业,深度自主学习功能使得机器可以逐渐完成真正意义上的自主作业,大大提高了机器的智能化程度,采用机器视觉等多种引导移动作业方式,会使机器更能适应山区复杂地形作业,实现对大型灌木或果园的喷洒作业,节省人工并减少喷药过程对人体的损伤。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下, 还可以根据这些附图获得其他的附图。
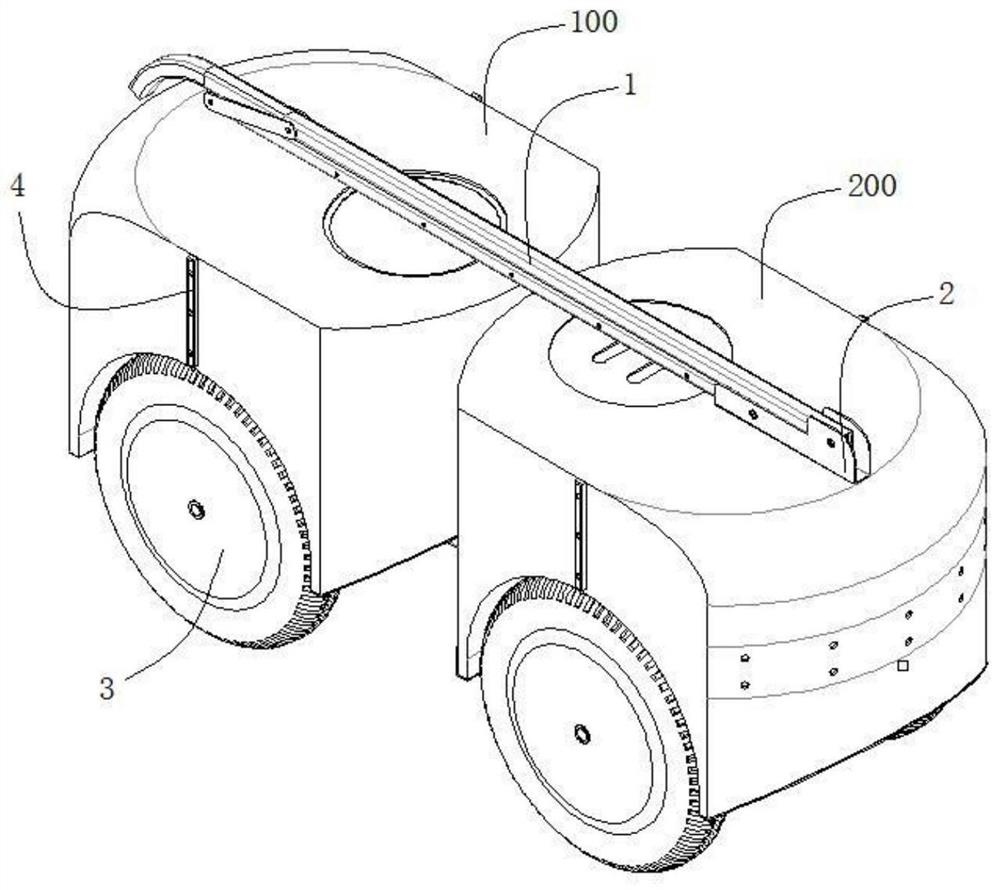
图1 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架立体图;
图2 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架左视图;
图3 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架后视图;
图4 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架俯视图;
图5 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架仰视图;
图6 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架左视图中的B-B 剖视图;
图7 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架多节安装示意图;
图8 为本发明的一种全自主移动机器人控制的农药喷洒装置的轮式全地形机器人构架的喷杆展开后结构示意图;
图9 为本发明的一种全自主移动机器人控制的农药喷洒装置的反馈联轴器旋转示意图A;
图 10 为本发明的一种全自主移动机器人控制的农药喷洒装置的反馈联轴器旋转示意图B;
图 11 为本发明的一种全自主移动机器人控制的农药喷洒装置的反馈联轴器旋转示意图C;
图 12 为本发明的一种全自主移动机器人控制的农药喷洒装置及使用方法的控制系统结构框图;
图 13 为本发明的一种全自主移动机器人控制的农药喷洒装置及使用方法的控制系统程序框图。
图中:100、药液箱;200、车头箱;1、喷杆;2、喷杆支座;3、自驱动轮;4、B 复合光电传感器模块;5、轮轴;6、反馈联轴器;7、卡盖;8、A 复合光电传感器模块;9、C 复合光电传感器模块;10、检修盖;11、控制器模块;12、自驱动轮控制器;13、电池模块;14、出水管;15、高压力水泵。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述,显然,所描述的实施例仅仅是本发明一部分实施例, 而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例 1
一种全自主移动机器人控制的农药喷洒装置及使用方法,包括轮式全地形机器人构架、控制站和控制系统,所述轮式全地形机器人构架由车头箱 200 和药液箱 100 组成且呈火车串联状,所述车头箱 200 与药液箱 100 之间配合连接有反馈联轴器 6 并通过反馈联轴器 6 相连接,所述车头箱 200 和药液箱 100 两侧底部均安装有自驱动轮 3 且自驱动轮 3 为两个,所述车头箱 200 和药液箱 100 表面均安装有A 复合光电传感器模块8,所述车头箱 200 前下部安装有C 复合光电传感器模块 9,所述车头箱 200 顶部中间位置安装有喷杆 1,所述车头箱200 顶部靠近药液箱 100 一侧安装有检修盖 10,所述车头箱 200 内部安装有控制器模块 11、自驱动轮控制器 12 和电池模块 13,所述药液箱 100顶部安装有高压力水泵 15,所述高压力水泵 15 出水端安装有出水管 14 并通过出水管14与喷杆 1 相连接,所述药液箱 100 底部可拆卸连接有卡盖 7,所述药液箱 100和车头箱 200 外侧壁均安装有B 复合光电传感器模块 4。
优选的,所述车头箱 200 和药液箱 100 底部均安装有轮轴 5,所述自驱动轮 3之间通过轮轴 5 相连接。
优选的,所述车头箱 200 顶部中间位置固定连接有喷杆支座 2,所述车头箱 200通过喷杆支座 2 与喷杆 1 相连接。
优选的,所述B 复合光电传感器模块 4 和C 复合光电传感器模块 9 内部均镶嵌有无线电天线和光电测距传感器。
优选的,所述 A 复合光电传感器模块 8 内部镶嵌有无线电天线和光学成像传感器。
优选的,所述控制站用于设定参数,远程记录作业状态和紧急停机,所述控制系统采用光电距离传感器、GPS 和机器视觉三种方式引导机器移动作业, 所述机器视觉采用卷积神经网络实现,决策核心采用模糊控制以及深度学习技术实现。
优选的,所述的一种全自主移动机器人控制的农药喷洒装置具体使用方法操作包含如下步骤:
S1、开机:使用容器配置药液,配置完成后转移到药液箱 100 内部,系统开机,程序初始化,A 复合光电传感器模块 8、B 复合光电传感器模块 4 和C 复合光电传感器模块 9开机自检,自驱动轮 3 自检,机器自身电子陀螺仪初始化,GPS 信号状态自检,机器视觉自检,确定所在环境各种参数。
S2、预设目标:通过控制站对机器人的作业区域以及大致的移动路径进行设定。
S3、正式作业:机器人通过A 复合光电传感器模块 8、B 复合光电传感器模块 4和C 复合光电传感器模块 9 感知周围环境,以调整左右距离和左右方向, 开启高压力水泵 15,电池模块 13 为高压力水泵 15 供电运转,高压力水泵 15运转通过出水管 14 将药液箱 100 内部药液排出至喷杆 1 内部并喷出,自驱动轮控制器 12 运转控制自驱动轮3 转动以驱使机体进行移动,移动过程中喷杆 1 进行喷洒作业,当作业过程中遇到设备异常以及环境条件超出设计范围,如移动路径上出现不能逾越和绕开的大坑等状况时,机器会自动停机报警。
S4、结束作业:当预设范围或路径行驶完整后,机器人可以自主返回或遥控返回,返回后进行关机,程序开始做数据保存及分析,记录此次作业的各种参数,包括GPS 位置参数以及移动路径的环境参数等,以便下次可以不用设定作业目标就可以重复作业,且机器人会调用之前的作业数据进行完善本次作业动作,逐渐完成真正意义上的自主作业。
综上所述:本发明提供的一种全自主移动机器人控制的农药喷洒装置及使用方法,其自驱动轮控制器控制器驱动轮转动带动机体进行移动,高压力水泵将药液箱内部药液加压后抽出并经过喷杆排放,控制站用于设定参数,远程记录作业状态和紧急停机,控制系统采用光电距离传感器、GPS 和机器视觉三种方式引导机器移动作业,机器视觉采用卷积神经网络实现,决策核心采用模糊控制以及深度学习技术实现,通过计算机内部神经网络视觉程序控制机器人,实现果园全流程无人喷药作业,通过预设参数可以对机器的移动范围和移动路径进行控制,进而控制农药喷洒范围,喷洒后机器可以自主返回或者遥控返回, 返回后,程序开始做数据保存及分析,记录作业各种参数,以便下次可以不用设定作业目标就可以重复作业,深度自主学习功能使得机器可以逐渐完成真正意义上的自主作业,大大提高了机器的智能化程度,采用机器视觉等多种引导移动作业方式,会使机器更能适应山区复杂地形作业,实现对大型灌木或果园的喷洒作业,节省人工并减少喷药过程对人体的损伤。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种全自主移动机器人控制的农药喷洒装置及使用方法
- 一种机场自主移动机器人、行李货物转运系统及使用方法