晶圆搬送装置、故障救援系统及故障救援方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及自动搬运技术领域,特别涉及一种晶圆搬送装置、故障救援系统及故障救援方法。
背景技术
自动物料传送系统(AMHS,Automated Material Handling System)一般具有多个晶圆搬送装置(OHT,Overhead Hoist Transport),该晶圆搬送装置用于抓放物件并带动所述物件沿工作轨道移动。当在工作轨道上行走的晶圆搬送装置发生故障而导致无法自主行走时,会导致整个自动物料传送系统无法正常运转。
目前,当晶圆搬送装置发生故障而无法自主行走时,工作人员需要先进行登高作业,通过外接电源解锁发生故障的晶圆搬送装置的走行马达的刹车,再将发生故障手动拖行至维修站,当维修站距离故障发生点较远时,拖行时间相应较久,影响了自动物料传送系统的运转效率。
发明内容
本发明实施例提供一种晶圆搬送装置、故障救援方法及故障救援系统,实现通过另一晶圆搬送装置带动发生故障的晶圆搬送装置行走,提高自动物料传送系统的运转效率,节省人力成本。
本发明实施例提供一种晶圆搬送装置,包括:搬送车;连接件,连接件设置于搬送车上,且连接件相对于搬送车可移动;配合件,配合件设置于搬送车上,用于与另一搬送车上的连接件固定连接。
另外,连接件包括连接部件以及驱动部件,驱动部件用于驱动连接部件移动,以使连接部件与另一晶圆搬送装置的配合件固定连接。
另外,固定连接方式包括卡扣式连接或者磁吸式连接。
另外,连接部件包括端部连接件和连接杆;连接杆与驱动部件连接且可动地设置于搬送车上;端部连接件固定于连接杆远离驱动部件的一端,且端部连接件适于与另一晶圆搬送装置的配合件固定连接。
另外,端部连接件与配合件中的一者具有凹陷部,另一者具有适于与凹陷部相卡合的凸起部。
另外,端部连接件用于与配合件固定连接的端面具有第一磁性,配合件具有第二磁性,且第二磁性与第一磁性相反。
另外,连接部件还包括转动轴,驱动部件驱动转动轴转动,以带动连接杆相对于搬送车转动,从而使端部连接件与另一晶圆搬送装置的配合件固定连接。
另外,连接杆包括可伸缩杆,驱动部件驱动可伸缩杆伸长,以带动连接杆相对于搬送车移动,从而使端部连接件与另一晶圆搬送装置的配合件固定连接。
另外,该晶圆搬送装置还包括测距传感器,用于检测相邻两台搬送车之间的距离,当相邻搬送车之间的距离等于预设距离时,驱动部件驱动连接部件与另一晶圆搬送装置的配合件固定连接。
另外,连接部件设置于搬送车的与搬送车行走方向相同或相反的侧壁表面。
另外,该晶圆搬送装置包括:走行马达,用于驱动搬送车移动,且走行马达与配合件电连接;输电装置,输电装置与连接部件电连接,当连接部件与另一晶圆搬送装置的配合件固定连接时,输电装置经由连接部件以及配合件向走行马达供电。
本发明实施例还提供一种故障救援系统,包括:至少两台本发明实施例中任一项的晶圆搬送装置,且至少一台晶圆搬送装置的搬送车在工作轨道上行走;故障检测模块,当在所述工作轨道上行走的所述晶圆搬送装置发生故障时,用于检测发生故障的所述晶圆搬送装置的故障类型,所述故障类型包括系统可修复故障或系统不可修复故障;调度模块,当所述故障类型为系统可修复故障时,用于调度另一晶圆搬送装置;控制模块,用于控制晶圆搬送装置在工作轨道上行走,且用于控制一晶圆搬送装置的连接件与另一晶圆搬送装置的配合件固定连接。
本发明实施例还提供了一种故障救援方法,包括:提供至少两台本发明实施例中任一项的晶圆搬送装置,且至少一台晶圆搬送装置的搬送车在工作轨道上行走;当在工作轨道上的晶圆搬送装置发生故障,且故障类型为系统不可修复故障时,调度另一晶圆搬送装置进入工作轨道,且控制另一晶圆搬送装置的连接件与发生故障的晶圆搬送装置的配合件固定连接,以带动发生故障的晶圆搬送装置在工作轨道上行走。
另外,当另一晶圆搬送装置与发生故障的晶圆搬送装置之间的距离等于预设距离时,控制另一晶圆搬送装置的连接件与发生故障的晶圆搬送装置的配合件固定连接。
另外,连接件包括连接部件和驱动部件,晶圆搬送装置包括走行马达和输电装置,走行马达与配合件电连接,输电装置与连接部件电连接,当另一晶圆搬送装置的连接部件与发生故障的晶圆搬送装置的配合件固定连接时,控制输电装置经由连接部件以及配合件向走行马达供电。
与现有技术相比,本发明实施例提供的技术方案具有以下优点:
本发明实施例提供一种晶圆搬送装置,晶圆搬送装置包括搬送车及设置于搬送车上的连接件和配合件,连接件和配合件适于固定连接,从而使得在工作轨道上运行的晶圆搬送装置发生故障而无法自主行走时,可以调度另外任意一台晶圆搬送装置与发生故障的晶圆搬送装置形成固定连接,带动发生故障的晶圆搬送装置前往维修站,从而避免因为一台晶圆搬送装置发生故障,导致整个自动物料传送系统无法正常运转。也就是说有利于实现晶圆搬送装置的自动救援,提高自动物料传送系统的运转效率,节省人力成本。
另外,采用卡扣式连接或磁吸式连接可以保证连接件与配合件固定连接的紧密性,避免连接件与配合件相互脱离。
另外,连接件中的连接杆包括可伸缩杆,使得连接件能够在实现较远距离的固定连接的同时,占据较小的空间位置。
另外,走行马达与配合件电连接,输电装置与连接部件电连接,使得输电装置能够经由连接部件以及配合件向走行马达供电,解锁走行马达的刹车。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的部件表示为类似的部件,除非有特别申明,附图中的图不构成比例限制。
图1是本发明一实施例提供的一种晶圆搬送装置的结构示意图;
图2是本发明又一实施例提供的一种晶圆搬送装置的结构示意图;
图3是本发明另一实施例提供的一种晶圆搬送装置的结构示意图;
图4是本发明另一实施例提供的一种晶圆搬送装置的结构示意图;
图5是本发明另一实施例提供的一种晶圆搬送装置的结构示意图;
图6为本发明另一实施例提供的一种故障救援系统的功能结构示意图;
图7为本发明另一实施例提供的一种故障救援方法的流程示意图。
具体实施方式
由背景技术可知,现有自动物料传送系统中,当在工作轨道上走行的晶圆搬送装置发生故障而无法自主走行时,会严重影响自动物料传送系统的运转效率。
为解决上述问题,本发明实施例提供了一种晶圆搬送装置,晶圆搬送装置包括搬送车;连接件,连接件设置于搬送车上,且连接件相对于搬送车可移动;配合件,配合件设置于搬送车上,用于与另一搬送车上的连接件固定连接。由于连接件与配合件适于固定连接,从而使得在工作轨道上行走的晶圆搬送装置发生故障时,可以调度另外任意一台晶圆搬送装置与发生故障的晶圆搬送装置形成固定连接,带动发生故障的晶圆搬送装置前往维修站,避免发生故障的晶圆搬送装置堵塞工作轨道,提高自动物料传送系统的运转效率,节省人力成本。
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施例进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施例中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施例的种种变化和修改,也可以实现本申请所要求保护的技术方案。
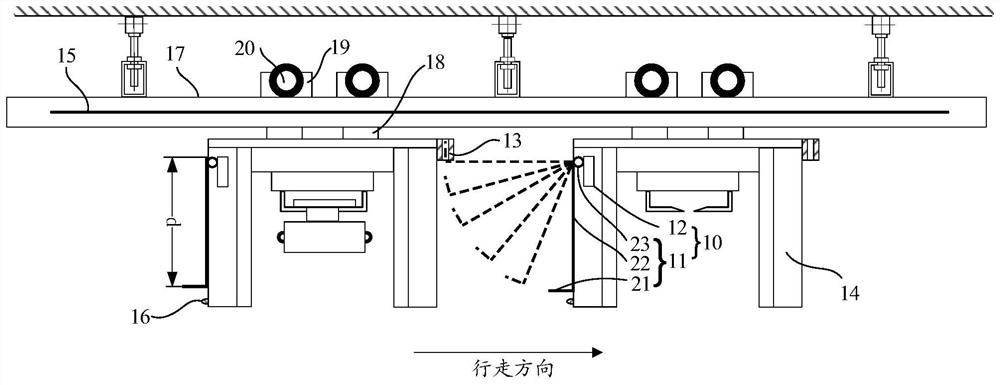
图1为本发明一实施例提供的一种晶圆搬送装置的结构示意图,为了便于图示和说明,图1中示出了两台晶圆搬送装置。
参照图1,晶圆搬送装置包括:搬送车14以及设置于搬送车14上的连接件10及配合件13,连接件10相对于搬送车14可移动,配合件13设置于搬送车14上,用于与另一搬送车14上的连接件10固定连接。
以下将结合附图对本实施例提供的晶圆搬送装置进行详细说明。
轨道17悬挂在支撑部(未标示)上,晶圆搬送装置位于轨道17上,搬送车14用于半导体制造过程运送晶圆盒(wafer box)。在本实施例中,轨道17内铺设有励磁线15,晶圆搬送装置包括无线磁感应取电装置18,还包括设置在轨道17上的走行马达19及走行轮20,无线磁感应取电装置18与走行马达19电连接,无线磁感应取电装置18从励磁线15上取电,并向走行马达19供电,走行马达19驱动走行轮20,以使搬送车14沿轨道17移动。此外,走行马达19还与配合件13电连接。
本实施例中,连接件10包括连接部件11以及驱动部件12,驱动部件12用于驱动连接部件11移动,以使连接部件11与另一晶圆搬送装置的配合件13配合连接。
具体地,连接部件11包括端部连接件21、连接杆22及转动轴23,连接杆22与转动轴23连接且可动地设置于搬送车14上,端部连接件21固定于连接杆22远离驱动部件12的一端,且端部连接件21适于与另一晶圆搬送装置的配合件13固定连接。
在本实施例中,驱动部件12驱动转动轴23转动,以带动连接杆22相对于搬送车14转动。驱动部件12可以为驱动马达。连接杆22及端部连接件21可以为圆柱形或者其他任意形状。
本发明实施例中,在初始状态下,连接部件11设置于搬送车14的与搬送车14行走方向相同或相反的侧壁表面。在其他实施例中,连接部件可以设置在搬送车的任意侧壁表面,能实现与另一搬送车配合件的固定连接即可。
在本实施例中,配合件13为中空圆柱状,且中空区域内径大于或等于端部连接件的圆柱直径,以便使一搬送车14的端部连接件21能够处于另一搬送车14的配合件13的中空区域内,进而为实现配合件13与端部连接件21固定连接提供基础。当配合件13与端部连接件21固定连接时,连接件10所在搬送车14的行走能够带动配合件13所在搬送车,从而将其移至指定位置。
需要说明的是,在端部连接件21设置在配合件13的中空区域内的过程中,为了防止端部连接件21受到重力作用而掉落,可以通过驱动部件12持续向连接件10提供动力,从而防止端部连接件21从配合件13内脱离。
为了更好的对晶圆搬送装置进行说明,图1中使用实线表示连接部件11的初始状态,使用虚线表示连接部件11移动过程中以及与配合件13固定连接时的状态。
如图1所示,左侧晶圆搬送装置发生故障而无法自主行走时,右侧晶圆搬送装置启动救援功能,带动发生故障的晶圆搬送装置至指定位置。本实施例中,晶圆搬送装置还包括,测距传感器16,测距传感器16用于检测两台搬送车14之间的距离,当相邻搬送车14之间的距离等于预设距离时,驱动部件24驱动连接部件11与另一晶圆搬送装置的配合件13固定连接。
在本实施例中,工作人员提前设定预设距离L,预设距离L大于连接杆的长度d,当一晶圆搬送装置向另一晶圆搬送装置行走时,测距传感器16检测两台搬送车14之间的距离。当测距传感器16检测到两台搬送车之间的距离等于预设距离L时,驱动部件12开始驱动转动轴23转动,以带动连接杆22相对于搬送车14转动,从而使得端部连接件21与另一晶圆搬送装置的配合件13固定连接。
本实施例中,晶圆搬送装置还可以包括:输电装置,输电装置与连接部件11电连接,连接部件11与另一晶圆搬送装置的配合件13固定连接时,输电装置经由连接部件11以及配合件13向走行马达19供电。需要说明的是,在本实施例中,输电装置为无线磁感应取电装置18,无线磁感应取电装置18通过连接部件11及配合件13向走行马达19供电。此外,在本实施例中,无线磁感应取电装置18还为驱动部件12供电,驱动部件12驱动连接部件11转动。在其他实施例中,输电装置也可以为内置于搬送车的独立电源,独立电源无需取电。
当走行马达的刹车锁定时,通过救援晶圆搬送装置的连接部件11和故障晶圆搬送装置的配合件13向故障晶圆搬送装置的走行马达19供电以解锁走行马达的刹车,使得救援晶圆搬送装置能够带动故障晶圆搬送装置到达维修站,从而节省人力成本,提高物料系统运输效率。
需要说明的是,当晶圆搬送装置出现驱动故障、卡盘故障、传感器异常等故障时,会造成走行马达的刹车锁定防止晶圆搬送装置在轨道上溜车或撞车,影响自动物料传送系统的正常运转。需要说明的是,当晶圆搬送装置发生故障时,无线磁感应取电装置无法解锁走行马达的刹车。现有技术中,采用外接的其他电路解锁走行马达的刹车。
图2为本发明又一实施例提供的一种晶圆搬送装置的结构示意图。
与上一实施例相同或者相应的特征,可参考上一实施例的相应说明,以下不做赘述。
本实施例与上一实施例的不同在于,在本实施例中,连接部件与配合件的固定连接方式为卡扣式连接。具体地,端部连接件32与另一晶圆搬送装置的配合件31的固定连接方式为卡扣式连接,其中,端部连接件32具有凸起部321,配合件31具有适于与凸起部321相卡合的凹陷部311。凸起部321可以为弹性材料或弹性结构,例如橡胶或弹簧片。
采用卡扣式连接能够实现端部连接件32和配合件31的紧密连接。在端部连接件32和配合件31相卡合后,可以不需要驱动部件33为端部连接件32提供驱动力,避免了端部连接件32与配合件31的脱离。也就是说,采用卡扣式连接能够降低拖行发生故障的晶圆搬送装置的电力消耗,节约资源。
需要说明的是,端部连接件与所述配合件中的一者具有凹陷部,另一者具有适于与所述凹陷部相卡合的凸起部即可。相应的,在其他实施例中,可以为配合件具有凸起部,端部连接件具有适于与凸起部相卡和的凹陷部。
还需要说明的是,在其他实施例中,连接件与配合件的固定连接方式也可以为磁吸式连接。具体地,参考图3,图3为本实施例提供的另一种晶圆搬送装置的结构示意图,端部连接件42与配合件41的固定连接方式为磁吸式连接。其中,端部连接件42用于与另一晶圆搬送装置配合件41固定连接的端面具有第一磁性,另一晶圆搬送装置的配合件41具有第二磁性,且第一磁性与第二磁性相反。
具体来说,一晶圆搬送装置的端部连接件的端面的磁性为N,相应的,另一晶圆搬送装置的配合件的磁性为S。
采用磁吸式连接,使得连接件与配合件的结构更为简单,且通过磁吸式连接方式可以有效的解决端部连接件受到重力掉落的问题。
图4为本发明另一实施例提供的一种晶圆搬送装置的结构示意图。
与前述实施例不同的是,前述实施例中,连接部件相对于搬送车可移动的实现方式为转动,本实施例中,连接部件相对于搬送车可移动的实现方式为在平行于晶圆搬送装置行走方向上伸长。
参考图4,在本实施例中,连接部件包括端部连接件51和连接杆53。其中,连接杆53为可伸缩杆。驱动部件54驱动可伸缩杆伸长,并且使连接杆53相对于搬送车50移动,从而使端部连接件51与另一晶圆搬送装置的配合件52固定连接。
可伸缩杆相较于传统直杆而言,能够在实现较远距离的固定连接的同时,占据较小的空间位置。
相应的,本实施例中,固定连接方式也可以为磁吸式,图5为本实施例提供的另一种晶圆搬送装置的结构示意图,端部连接件61与另一晶圆搬送装置的配合件62的固定连接方式为磁吸式连接。需要说明的是,连接部件还可以包括转动轴(未图示),转动轴的作用在于:当连接杆伸长后,转动轴带动连接杆转动一定角度,以使端部连接件与另一晶圆搬送装置的配合件固定连接。
相应的,本发明实施例还提供一种故障救援系统,包括前述实施例中至少两台晶圆搬送装置。以下将结合附图对本发明实施例提供的故障救援系统进行详细说明。
图6为本发明实施例提供的一种故障救援系统的功能结构示意图。
如图6所示,在本实施例中,该故障救援系统包括:至少两台晶圆搬送装置,且晶圆搬送装置711的搬送车在工作轨道上走行;故障检测模块72,当在工作轨道上行走的晶圆搬送装置711发生故障时,用于检测故障晶圆搬送装置711的故障类型,故障类型包括系统可修复故障或系统不可修复故障;调度模块73,当故障类型为系统不可修复故障时,用于调度另一救援晶圆搬送装置712;控制模块74,用于控制晶圆搬送装置在工作轨道上走行,且用于控制救援晶圆搬送装置712的连接件与故障晶圆搬送装置711的配合件固定连接。
需要说明的是,在工作轨道上走行的晶圆搬送装置以及未进入轨道的晶圆搬送装置都可以用于调度,调度模块调度的另一晶圆搬送装置的条件参数由工作人员设定,其中包括救援所需时间和晶圆搬送装置的搬送车是否处于运送晶圆盒状态。还需要说明的是,当晶圆搬送装置的连接件和配合件具有磁性且磁性相同时,被调度的另一晶圆搬送装置的磁性与发生故障的晶圆搬送装置的磁性相反。
该故障救援系统能够实现任意两台相邻晶圆搬送装置的固定连接,当在工作轨道上走行的任一晶圆搬送装置发生故障时,除发生故障的晶圆搬送装置以外的任一晶圆搬送装置都能够与发生故障的晶圆搬送装置形成固定连接,进而能够通过控制另一晶圆搬送装置的走行,带动发生故障的晶圆搬送装置走行,避免发生故障的晶圆搬送装置堵塞工作轨道,提高自动物料传送系统的运转效率,节省人力成本。
相应的,本发明实施例还提供一种故障救援方法,包括:提供至少两台前述的晶圆搬送装置,且至少一台晶圆搬送装置在工作轨道上行走;当在所述工作轨道上的所述晶圆搬送装置发生故障时,调度另一所述晶圆搬送装置进入所述工作轨道,且控制另一晶圆搬送装置的连接件与发生故障的所述晶圆搬送装置的配合件固定连接,以带动发生故障的所述晶圆搬送装置在所述工作轨道上行走。以下将结合附图进行详细说明。
如图7所示,步骤S101:晶圆搬送装置发生故障。
其中,晶圆搬送装置在工作轨道上行走。晶圆搬送装置的故障包括驱动故障、卡盘故障、传感器故障等,当晶圆搬送装置出现故障时,会造成走行马达的刹车锁定,晶圆搬送装置停止行走。
步骤S102:检测发生故障的晶圆搬送装置的故障类型。
故障类型包括系统可修复故障和系统不可修复故障。系统可修复故障必须由工作人员去故障发生地处理,系统不可修复故障可以启动救援晶圆搬送装置。
步骤S103:判断故障类型是否属于系统可修复故障。
当故障类型属于系统可修复故障时,执行步骤S104;当故障类型属于系统不可修复故障时时,执行步骤S106。
步骤S104:工作人员去故障发生地进行故障处理。
当故障类型属于系统可修复故障时,工作人员需前往故障发生地,用手持遥控器终端对故障搬运装置进行状态重置,状态复位成功后走行马达自动解锁。
步骤S105:晶圆搬送装置自主行走。
晶圆搬送装置的故障在被修复之后,自主行走至工作轨道或其他轨道位置。
步骤S106:调度用于救援的晶圆搬送装置。
当故障类型属于系统不可修复的故障类型时,系统发送指令调度另一晶圆搬送装置向发生故障的晶圆搬送装置移动。
需要说明的是,在工作轨道上走行的晶圆搬送装置以及未进入轨道的晶圆搬送装置都可以用于调度,工作人员设定可以设定调度参数及其优先级,用以确定将要调度的晶圆搬送装置,其中包括救援所需时间和晶圆搬送装置的搬送车是否处在运送晶圆盒状态。
步骤S107:用于救援的晶圆搬送装置移动到指定位置。
上述指定位置为救援晶圆搬送装置的连接件和故障晶圆搬送装置的配合件固定连接时,救援晶圆搬送装置所处的位置,该位置与连接杆的长度有关。
步骤S108:用于救援的晶圆搬送装置与发生故障的晶圆搬送装置固定连接。
当所述另一晶圆搬送装置与所述发生故障的晶圆搬送装置之间的距离等于预设距离时,控制另一晶圆搬送装置的连接件与所述发生故障的晶圆搬送装置的配合件固定连接。
具体地,当用于救援的晶圆搬送装置到达指定位置,即相邻两台搬送车之间的距离等于连接杆的长度时,连接杆相对于搬送车移动,所述移动包括伸长和转动中的一种或两种,当存在伸长和转动两种移动方式时,不对伸长和转动的先后次序和时间间隔进行限制,可以根据实际需要进行调整。
在其他实施例中,用于救援的另一晶圆搬送装置的配合件与发生故障的晶圆搬送装置的连接件固定连接,晶圆搬送装置具有内置电源,内置电源驱动连接杆移动。此外,工作人员可以提前设定预设距离,预设距离大于连接杆的长度,当测距传感器检测到用于救援的晶圆搬送装置与发生故障的晶圆搬送装置之间的距离等于预设距离时,连接杆相对于搬送车开始移动,以使端部连接件与配合件固定连接。
步骤S109:为发生故障的晶圆搬送装置的走行马达供电,解锁走行马达。
具体地,所述连接件包括连接部件和驱动部件,所述晶圆搬送装置包括走行马达和输电装置,所述走行马达与所述配合件电连接,所述输电装置与所述连接部件电连接。
在本实施例中,输电装置为无线磁感应取电装置。当所述另一晶圆搬送装置的所述连接部件与所述发生故障的晶圆搬送装置的所述配合件固定连接时,无线磁感应取电装置通过连接部件及配合件向走行马达供电,解锁走行马达的刹车。
需要说明的是,当故障检测类型为系统不可修复故障时,所述晶圆搬送装置自带的无线磁感应取电装置无法向被锁定的走行马达供电,必须通过外接供电装置解锁走行马达的刹车。
步骤S110:将发生故障的晶圆搬送装置拖至维修站。
故障晶圆搬送装置被解锁后,救援晶圆搬送装置带动故障晶圆搬送装置到达指定维修站,需要说明的是,在实际维修中,发生故障的晶圆搬送装置可以被移动到轨道上的任意地点,最终地点由工作人员设定或软件自动判断。
步骤S111:工作人员去维修站进行故障处理。
当发生故障的晶圆搬送装置被送至维修站后,工作人员去维修站进行维修处理。需要说明的是,工作人员只是一个代称,在实际维修过程中,工作人员还包括用于维修的自动机器人。
本实施例通过的故障救援方法,该故障救援方法能够实现对发生故障的晶圆搬送装置进行高效率的及时救援,同时节省人力成本。当在工作轨道上走行的晶圆搬送装置发生故障导致走行马达锁定,并无法通过系统修复时,调度另一晶圆搬送装置进入工作轨道,另一晶圆搬送装置的连接件与发生故障的晶圆搬送装置的配合件固定连接,从而带动发生故障的晶圆搬送装置移动,避免发生故障的晶圆搬送装置停留在工作轨道影响轨道上其他晶圆搬送装置的正常运行,提高自动物料系统的运转效率。需要说明的是,在其他实施例中,用于救援的另一晶圆搬送装置在工作轨道上走行。
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各自更动与修改,因此本发明的保护范围应当以权利要求限定的范围为准。
- 晶圆搬送装置、故障救援系统及故障救援方法
- 晶圆搬送装置、故障救援系统