工艺工具及在其内部拍摄图像数据的方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明的实施例是有关于一种工艺工具及在其内部拍摄图像数据的方法。
背景技术
半导体器件制作是用于生成日常电子器件中存在的集成电路(integratedcircuits)的工艺。制作工艺是包括沉积(deposition)步骤、光刻(photolithographic)步骤及化学处理(chemical processing)步骤的多步骤序列,在所述步骤期间在晶圆上逐渐生成电子电路。在沉积步骤期间,可将晶圆加载到室壳体中,且可将材料的薄膜沉积到晶圆上。室壳体可界定真空室,所述真空室提供促进均匀沉积的受控环境,从而向晶圆上产生实质上可靠的薄膜。
发明内容
本发明实施例提供一种工艺工具,包括壳体、晶圆夹盘、载体晶圆、相机以及无线接收器。壳体界定真空室。晶圆夹盘位于壳体中。载体晶圆位于晶圆夹盘上。相机集成在载体晶圆上,其中相机面对壳体的顶部且被配置成以无线方式拍摄壳体内的所关注物体的图像。无线接收器位于壳体外部且被配置成在真空室被密封的同时以无线方式从相机接收图像。
本发明实施例提供一种工艺工具,包括室壳体、所关注物体、晶圆夹盘、载体晶圆以及第一相机。室壳体界定真空室。所关注物体位于真空室的上部部分内。晶圆夹盘位于真空室的下部部分内。载体晶圆设置在晶圆夹盘上,其中载体晶圆的顶表面面对所关注物体的底表面。第一相机位于载体晶圆上且面对所关注物体,其中第一相机被配置成以无线方式测量所关注物体的参数。
本发明实施例提供一种在工艺工具的内部拍摄图像数据的方法,包括将晶圆加载到由真空壳体界定的真空室中,其中晶圆包括相机,且相机集成在晶圆的顶表面上。对真空室进行密封,以使真空室处于操作状态下。在真空室处于操作状态下的同时,使用相机以无线方式拍摄真空壳体的内部的图像数据。以及,将图像数据发送到无线接收器以处理图像数据,其中无线接收器位于真空室外部。
附图说明
结合附图阅读以下详细说明,会最好地理解本公开内容的各个方面。应注意,根据本行业中的标准惯例,各种特征并非按比例绘制。事实上,为论述清晰起见,可任意增大或减小各种特征的尺寸。
图1A、图1B及图1C分别示出在真空室中具有相机的工艺工具的一些实施例的剖视图、俯视图及透视图。
图2A、图2B及图2C分别示出在具有校准标记的真空室中具有相机的工艺工具的一些附加实施例的剖视图、俯视图及透视图。
图3A及图3B示出了用于进行物理气相沉积工艺的靶的一些实施例的剖视图。
图4A、图4B及图4C示出在化学气相沉积工艺中使用的喷淋头的一些实施例的各种视图。
图5、图6、图7、图8A及图8B示出在真空状态下拍摄真空室的二维(twodimensional,2D)图像的方法的一些实施例的剖视图及透视图。
图9示出图5、图6、图7、图8A及图8B所示方法的一些实施例的流程图。
图10、图11、图12、图13A、图13B、图14A及图14B示出在真空状态下拍摄真空室的三维(three dimensional,3D)图像的方法的一些实施例的剖视图及透视图。
图15示出图10、图11、图12、图13A、图13B、图14A及图14B所示方法的一些实施例的流程图。
[符号的说明]
100A、200A、300A、300B、400B、500、600、700、800A、1000、1100、1200、1300A、1400A:剖视图;
100B、200B、400A、400C:俯视图;
100C、200C、800B、1300B、1400B:透视图;
101:真空室;
102:载体晶圆;
104:相机;
106:光源;
108:镜头;
110、210:相机壳体;
112:真空壳体;
114:晶圆夹盘;
116:校准标记;
118:所关注物体;
130:电池源;
140:图像传感器;
150:无线接收器;
206:传感器;
208:发射器;
220:连续延伸线;
302:靶;
302b:底表面;
304:射频(RF)电压;
306:连续直流(DC)电压;
310:可变电容器;
402:喷淋头;
404:孔;
406:腔室;
408:输入管线;
410:残留物;
602、1102:加载;
604、1104:开口;
802a、802b、802c:图像数据/图像;
804:光;
900、1500:方法;
902、904、906、908、910、1502、1504、1506、1508、1510、1512:动作;
1302:校准工艺;
1304:水平线;
1402a、1402b、1402c:图像数据;
AA’、CC’:线;
d
d
d
d
具体实施方式
以下公开内容提供用于实施所提供主题的不同特征的许多不同的实施例或实例。以下阐述组件及布置的具体实例以简化本公开内容。当然,这些仅为实例而非旨在进行限制。举例来说,在以下说明中,在第二特征之上或第二特征上形成第一特征可包括其中第一特征与第二特征被形成为直接接触的实施例,且也可包括其中第一特征与第二特征之间可形成附加特征从而使得第一特征与第二特征可不直接接触的实施例。另外,本公开内容可在各种实例中重复使用参考编号和/或字母。这种重复使用是为了简明及清晰的目的,且自身并不表示所论述的各个实施例和/或配置之间的关系。
此外,为易于说明,本文中可能使用例如“在…之下(beneath)”、“在…下方(below)”、“下部的(lower)”、“在…上方(above)”、“上部的(upper)”等空间相对性用语来阐述图中所示一个元件或特征与另一(其他)元件或特征的关系。除图中所绘制的取向以外,所述空间相对性用语还旨在囊括器件在使用或操作中的不同取向。装置可具有另外的取向(旋转90度或处于其他取向),且本文中所用的空间相对性描述语可同样相应地作出解释。
在半导体制作期间,举例来说可通过化学气相沉积(chemical vapordeposition,CVD)或物理气相沉积(physical vapor deposition,PVD)来进行将新材料沉积到晶圆上。CVD利用晶圆表面上的一种或多种前驱物(precursor(s))的化学反应和/或分解来将膜沉积到晶圆表面上。另一方面,PVD不使用一种或多种前驱物的化学反应和/或分解。而是,使要沉积的材料蒸发且接着凝结在晶圆表面上以将膜沉积到晶圆表面上。在CVD及PVD二者中,使用受控环境在晶圆之上产生均匀的膜。在许多实施例中,通过将晶圆加载到界定真空室的真空壳体中来实现受控环境。真空状态可将晶圆的表面能量改变成更适合于沉积,提供用于进行沉积的低压环境,并降低促进沉积所需的温度。
随着时间的推移,真空室中的结构中可能出现缺陷。在一些CVD工艺中,举例来说,包括多个孔作为前驱物输出端的喷淋头(shower head)将前驱物喷射到真空室中。前驱物发生化学反应和/或分解以在晶圆上沉积膜。随着时间的推移,喷淋头的一些部分被堵塞或包含不需要的残留物,由此所沉积的膜中可能具有污染物或在晶圆之上的厚度不均匀。在PVD工艺中,举例来说,在晶圆之上可布置有靶(target)。靶的材料(例如靶材料)可部分地通过气体的轰击沉积到晶圆上。随着时间的推移,靶可能会变成有缺陷的。靶缺陷可包括例如侵蚀、剥离和/或破裂。举例来说,靶缺陷可能导致电弧放电(arcing)和/或其他故障状态。此外,如果靶包括有缺陷的轮廓,则晶圆之上的所沉积的膜也可能为有缺陷的。举例来说,所沉积的膜在晶圆上的一些区域中可能比其他区域厚。因此,为防止和/或检测真空室中的缺陷结构,应对真空室进行监测。然而,由于当真空壳体处于操作状态(例如,真空状态、温度状态和/或压力状态)下时真空壳体被密封,因此难以对真空室进行监测。
本公开的各种实施例提供用于当真空室处于操作状态下时对真空室进行监测的工艺工具及方法。在一些实施例中,将包括相机的晶圆加载到界定真空室的真空壳体中。相机面对真空室的上部部分。接着对真空壳体进行密封,并将真空室置于真空状态和/或其他操作状态(例如压力状态或温度状态)下。在真空室处于操作状态下的同时,相机接着以无线方式拍摄真空室的图像数据。位于真空壳体外部的无线接收器被配置成以无线方式接收及处理从相机获取的图像数据。在一些实施例中,相机是飞行时间(time of flight,ToF)相机,所述ToF相机用于基于从ToF相机发射的辐射从所关注物体反射出来并返回到ToF相机所花费的时间来确定真空室中的所关注物体的3D图像轮廓。在其他实施例中,相机可为互补金属氧化物半导体(complementary metal oxide semiconductor,CMOS)图像传感器,例如可见于手机中用以拍摄所关注物体的2D图像的CMOS图像传感器。所关注物体可为例如PVD靶、CVD喷淋头或真空室中的一些其他合适的结构。
因此,前述方法可用于包括真空室(例如,PVD室、CVD室、刻蚀室、退火室、植入室、炉室等)的工艺工具中,以使得真空室中的缺陷可减轻。这转而允许良率提高及产生更可靠的器件(例如,晶圆验收测试性能高的器件)。举例来说,在一些实施例中,前述方法用于执行真空壳体的常规检查。举例来说,在一些实施例中,第一晶圆可在处于操作状态下的真空室内经历工艺(例如,CVD、PVD、刻蚀、退火、植入等)。在从真空室移除第一晶圆之后,可将包括相机的第二晶圆加载到真空室中以在处于操作状态下的真空室内确定所关注物体的状态,从而对真空室内的任何缺陷进行诊断。当提前在真空壳体中检测到缺陷时,可在将来识别、修复及防止缺陷的成因。
图1A示出工艺工具的一些实施例的剖视图100A,所述工艺工具包括在真空壳体内集成在载体晶圆上的相机,从而以无线方式拍摄真空壳体内的2D图像。
工艺工具包括界定真空室101的真空壳体112。在一些实施例中,晶圆夹盘114位于真空室101内且位于真空壳体112的下部部分之上。晶圆夹盘114被配置成固持载体晶圆102。在一些实施例中,晶圆夹盘114是静电夹盘(electrostatic chuck),所述静电夹盘使用第一电压偏压来静电固持到载体晶圆102上并使用第二电压偏压来释放载体晶圆102。在一些实施例中,所关注物体118可布置在真空室101内且布置在真空壳体112的上部部分附近。在一些实施例中,工艺工具可用于进行例如物理气相沉积(PVD)。因此,所关注物体118可为用于进行包含靶的材料的膜的沉积的靶,如图3A所示。在其他实施例中,工艺工具可用于进行例如化学气相沉积(CVD)。因此,所关注物体118可为包括用于释放用于进行膜的沉积的气体的孔的喷淋头,如图4A所示。在又一些实施例中,所关注物体118可为真空室101内用于进行例如刻蚀(etching)、退火(annealing)、植入(implantation)或加热(heating)的任何特征。
在一些实施例中,相机104集成在载体晶圆102的顶表面上。在一些实施例中,相机104分别包括位于相机壳体110上或相机壳体110内的镜头108及图像传感器140。在一些实施例中,图像传感器140在每一相机104上位于镜头108下方。在一些实施例中,从剖视图100A观察,镜头108可表现出矩形形状,而在其他实施例中,从剖视图100A观察,镜头108可表现出圆形或半圆形形状。在一些实施例中,载体晶圆102在晶圆夹盘114上为实质上平面的以使镜头108具有与彼此实质上齐平或共面的顶表面。在一些实施例中,图像传感器140是互补金属氧化物半导体(CMOS)图像传感器,例如蜂窝器件(cellular devices)上使用的CMOS图像传感器。在一些实施例中,相机104还包括光源106(例如闪光灯)。在其他实施例中,相机104不包括光源106。在这些其他实施例中,可将单独的光源集成到载体晶圆102上并与相机壳体110间隔开,或者可将单独的光源耦合到真空室101内的真空壳体112。在一些实施例中,载体晶圆102及相机104被配置成使每一相机104的镜头108面对真空壳体112内要拍摄的期望特征。举例来说。在一些实施例中,对所关注物体118的状态进行监测,且因此,每一相机104的镜头108面对所关注物体118并直接位于所关注物体118下方。
在一些实施例中,集成到载体晶圆102上的相机104的数目取决于要拍摄的所关注物体118的大小对于一个相机104来说是否过大。举例来说,在一些实施例中,仅将一个相机104集成到载体晶圆102上,而在其他实施例中,将多个相机104集成到载体晶圆102上。相机104分别被配置成使用镜头108从真空壳体112内部以无线方式拍摄图像数据,并且以无线方式将图像数据发送到真空壳体112外部的无线接收器150。接着可在存在操作状态(例如,真空状态、温度状态、压力状态等)的同时使用图像数据确定真空壳体112内部的所关注物体118的状态。相机104以无线方式拍摄及发送图像数据,这是因为真空壳体112被封闭且被真空密封以实现操作状态。
在一些实施例中,真空室101是暗的,因此光源106被配置成在相机104拍摄图像数据的同时激活。无线接收器150被配置成处理来自相机104的图像数据以确定和/或显示最终图像。举例来说,如果使用多个相机104,则无线接收器150可使用软件来对来自图像数据的所述多个图像进行编译并使所述多个图像交叠以确定和/或显示最终图像,在一些实施例中,所述最终图像可包括处于操作状态下的所关注物体118的2D图像。所述操作状态可影响所关注物体118的2D图像。举例来说,所关注物体118可当在真空室101中处于温度状态下时表现出不同的缺陷/特性,这是因为所关注物体118在不同温度下的热膨胀。此外,举例来说,所关注物体118可能在真空室101中在真空状态下表现出不同的缺陷/特性,这是因为所关注物体118在真空下的表面能量不同。因此,通过在真空室101内在处于操作状态下的同时以无线方式拍摄所关注物体118的2D图像,可更好地诊断所关注物体118的缺陷。
图1B示出真空室内的包括相机的载体晶圆的一些实施例的俯视图100B。图1B的俯视图100B对应于图1A的沿线AA’截取的剖视图100A。
在一些实施例中,电池源130可集成在载体晶圆102上,且可被配置成为相机104供电。因此,电池源130可耦合到相机104。在一些实施例中,每一相机104耦合到同一电池源130,而在其他实施例中,每一相机104可具有其自己的电池源130。
在一些实施例中,相机104与载体晶圆102的中心均匀地间隔开且彼此均匀地间隔开。在一些实施例中,相机104可比靠近载体晶圆102的中心更靠近载体晶圆102的边缘。在其他实施例中,相机104可比靠近载体晶圆102的边缘更靠近载体晶圆102的中心。在其他实施例中,相机104可不与彼此均匀地间隔开或者与载体晶圆102的中心均匀地间隔开。在一些实施例中,只有一个相机104位于载体晶圆102上并布置在载体晶圆102的中心。在其他实施例中,只有一个相机104位于载体晶圆102上并远离载体晶圆102的中心布置。然而,一个或多个相机104布置在载体晶圆102上以在处于操作状态下的同时以无线方式拍摄真空壳体112内的期望特征的图像。在一些实施例中,从俯视图100B观察,镜头108和/或光源106可表现出圆形形状。在其他实施例中,镜头108和/或光源106可表现出除圆形之外的形状(例如,矩形、三角形等)。
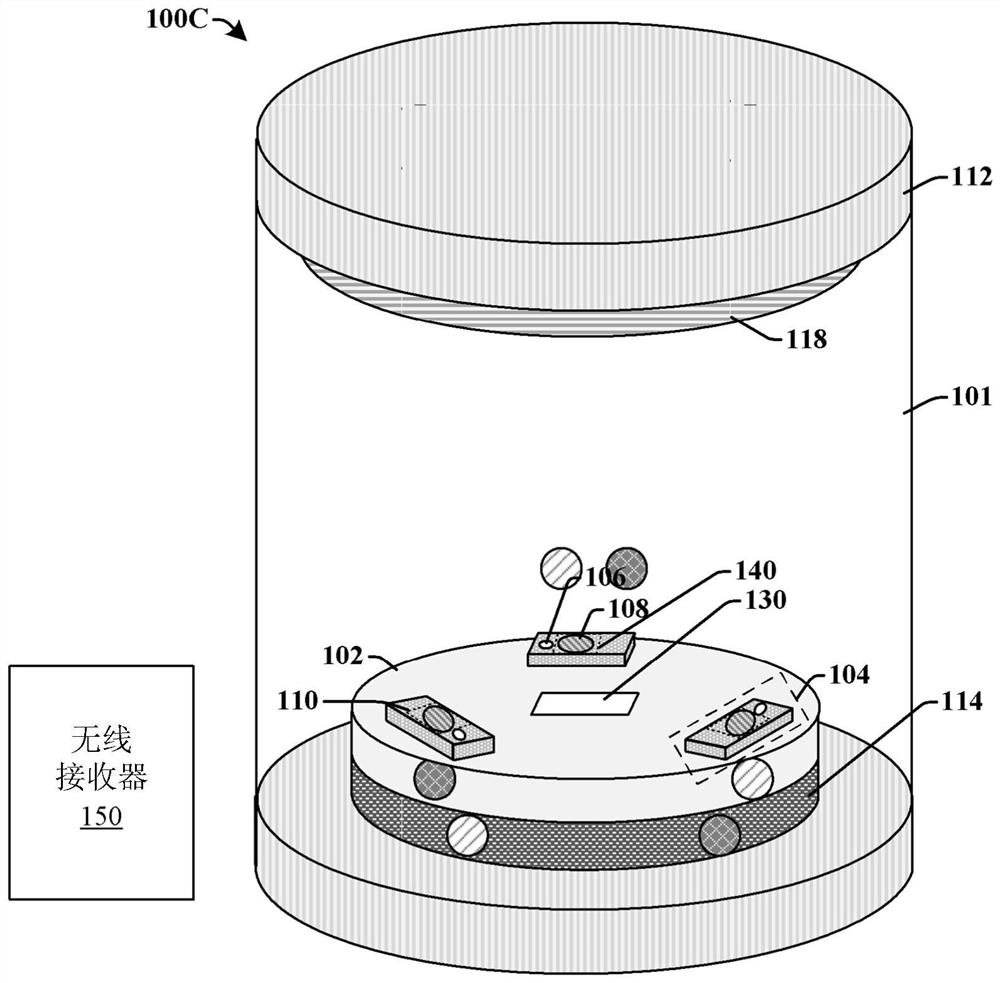
图1C示出真空室内的包括相机的载体晶圆的一些实施例的透视图100C。透视图100C对应于图1A的剖视图100A。
在一些实施例中,晶圆夹盘114可在真空壳体112的底表面上实质上居中。相似地,在一些实施例中,载体晶圆102可在所关注物体118下方居中且直接位于所关注物体118下方。在一些实施例中,载体晶圆102的表面积可小于、大于或等于所关注物体118的表面积。在一些实施例中,从载体晶圆102的底表面及相机104的顶表面测量的厚度可介于近似5毫米与近似7毫米之间的范围内。举例来说,在一些实施例中,从载体晶圆102的底表面及相机104的顶表面测量的厚度可大约等于移动电话的厚度,例如(举例来说)6毫米。在一些实施例中,载体晶圆102与所关注物体118之间的距离取决于根据所使用的工艺工具(例如,CVD、PVD、刻蚀室、炉室等)而定的参数。在一些实施例中,真空壳体112是圆柱形的,而在其他实施例中,真空壳体112具有一些其他合适的形状。
图2A示出工艺工具的一些实施例的剖视图200A,所述工艺工具包括在真空壳体内集成在载体晶圆上的相机,从而以无线方式拍摄真空壳体内的3D图像。
图2A的剖视图200A中的工艺工具包括与图1A的剖视图100A中的工艺工具相似的特征。在一些实施例中,相机104可为飞行时间(ToF)相机。在这种实施例中,相机104可包括布置在相机壳体210中的传感器206及发射器208。ToF相机可提供微米或小于微米的分辨率。举例来说,在一些实施例中,相机104可为12毫米乘8毫米且具有3微米分辨率的ToF相机。从剖视图200A观察,发射器208及传感器206可例如表现出圆形形状。发射器208被配置成朝所关注物体118发射辐射,且可例如为激光器或一些其他合适的辐射发射器。传感器206被配置成在辐射从所关注物体118反射并行进返回到相机104之后接收辐射。在一些实施例中,在收集数据之前校准相机104。因此,在一些实施例中,将校准标记116固定到真空壳体112内部。校准标记116被布置成使校准标记116不直接位于相机104与所关注物体118之间。换句话说,在一些实施例中,每一校准标记116相对于真空室101具有最内点,所述最内点与垂直于晶圆夹盘114的连续延伸线220相交,其中连续延伸线220不与所关注物体118或载体晶圆102相交。
在一些实施例中,相机104被配置成测量发射辐射与接收所反射的辐射之间所花费的时间以确定所关注物体118距相机104的距离。发射器208及传感器206分别发射及接收许多辐射脉冲以使得可收集所关注物体118的整个区域的3D深度轮廓。在一些实施例中,相机104将时间转换成距离,且接着以无线方式将距离数据发送到真空壳体112外部的无线接收器150,而在其他实施例中,相机104将时间数据发送到真空壳体112外部的无线接收器150以使用软件进行处理。在一些实施例中,用于将辐射的发射与辐射的接收之间的时间t转换成距离d的方程式可为
图2B示出真空室内的包括相机的载体晶圆的一些实施例的俯视图200B。图2B的俯视图200B对应于图2A的沿线AA’截取的剖视图200A。
在一些实施例中,如在图1B的俯视图100B中所述的电池源130也可位于图2B的俯视图200B中的载体晶圆102上。在一些实施例中,从俯视图200B观察,发射器208及传感器206可表现出圆形形状。从俯视图200B观察,对于三个相机104来说存在六个校准标记116。校准标记116的总数目对相机104的总数目的比率是多对一,或者换句话说,大于一以使每一相机104可使用多个校准标记116来验证校准。举例来说,在一些实施例中,每一相机104使用3个或更多个校准标记116来进行校准。在其他实施例中,每一相机104可使用2个校准标记116来进行校准。在一些实施例中,从俯视图200B观察,校准标记116具有三角形形状,但是应理解,校准标记116可表现出其他形状。校准标记116被固定到真空壳体112,且在一些实施例中,校准标记116彼此均匀地间隔开。在其他实施例中,校准标记116可不彼此均匀地间隔开。
此外,如针对图1B的俯视图100B中的相机104所述,在一些实施例中,相机104可在载体晶圆102上采取各种布置从而以无线方式拍摄处于真空状态下的真空壳体112内的期望特征。
图2C示出真空室内的包括相机的载体晶圆的一些实施例的透视图200C。透视图200C对应于图2A的剖视图200A。
图2C的透视图200C中的工艺工具包括与图1C的透视图100C中的工艺工具相似的特征,只是图2C所示相机104包括传感器206及发射器208且校准标记116被固定到真空壳体112。在一些实施例中,从透视图200C观察,发射器208及传感器206表现出球形。在一些实施例中,校准标记116用于校准相机104以使相机104可从相同的参考水平高度收集所关注物体118的3D深度轮廓。因此,校准标记116在真空壳体112中位于已知位置处。举例来说,在一些实施例中,校准标记116分别位于距真空壳体112的下表面第二距离d
图3A示出真空室的一些实施例的剖视图300A,所述真空室包括用于进行物理气相沉积(PVD)工艺的靶。
在一些实施例中,使用靶302作为真空室(例如真空室101)中的所关注物体(例如,图1A所示所关注物体118),所述真空室可为PVD室。来自靶302的材料可通过物理轰击蒸发并再沉积在晶圆上。晶圆可搁置在晶圆夹盘114上。在一些实施例中,使用可变电容器310向晶圆夹盘114施加电压偏压,此转而向晶圆施加偏压。在一些实施例中,靶302可具有底表面302b,底表面302b是实质上平面的且面对真空室(图1A所示101)中的晶圆夹盘(图1A所示114)。在一些实施例中,向靶302施加连续直流(direct current,DC)电压306以促进PVD。举例来说,在一些实施例中,使用可变电容器310向晶圆夹盘114及靶302施加偏压,以使来自靶302的材料被静电吸引到由晶圆夹盘114固持的晶圆。在一些实施例中,还向靶302施加射频(radio frequency,RF)电压304,以进一步控制偏压并防止电荷积聚在靶302上。
图3B示出真空室的一些实施例的剖视图300B,所述真空室包括在PVD工艺中使用之后被损坏的靶。
图3B的剖视图300B示出与图3A的剖视图300A相同的特征,只是靶302的底表面302b包括损坏。在一些实施例中,由于真空室101的真空状态、可变电容器310、连续DC电压306、RF电压304和/或PVD工艺的其他参数(例如,压力、温度等),靶302可包括底表面302b上的损坏。举例来说,靶302的底表面302b的损坏可包括侵蚀、剥离及破裂。损坏可能导致靶302具有不均匀的厚度,可能导致电弧放电,和/或可能导致一些其他故障状态。在一些实施例中,当存在对靶302的损坏时,所沉积的膜可能不均匀。为识别靶302的损坏的成因,应在真空状态下对靶302进行分析。接着,可调整PVD工艺的参数以防止靶302的将来损坏。
图4A示出在化学气相沉积(CVD)工艺中使用的喷淋头的一些实施例的俯视图400A。
在一些实施例中,使用喷淋头402作为真空室(例如图1A所示101)中的所关注物体(例如图1A所示118),所述真空室可为CVD室。喷淋头402包括多个孔404以将气体释放到真空室(图1A所示101)中,从而用于将膜沉积到晶圆上。喷淋头402的孔404面对晶圆夹盘(图1A所示114)。
图4B示出图4A所示喷淋头的一些实施例的沿线CC’截取的剖视图400B。
在一些实施例中,气体反应物(即,前驱物)经由输入管线408进入喷淋头402的腔室406。气体反应物接着离开腔室406并通过用于进行CVD的孔404进入真空室(图1A所示101)。孔404可均匀地分布气态反应物,以使膜均匀地沉积到晶圆上。
图4C示出在CVD室中使用之后被损坏的喷淋头的一些实施例的俯视图400C。
图4C的俯视图400C示出与图4A的俯视图400A相同的特征,其中在喷淋头402上添加了残留物410。在一些实施例中,由于CVD工艺的参数,残留物410可能积聚在喷淋头402上。在一些实施例中,残留物410可能堵塞喷淋头402上的孔404中的一些孔404。当孔404被堵塞时,气态反应物的分布不均匀,且可能出现膜在晶圆上的不均匀沉积。为识别喷淋头402上的残留物410的损坏的成因,可通过相机104(参见例如图1A)在真空状态和/或其他操作状态下对喷淋头402进行分析。接着,可调整CVD工艺的参数以防止喷淋头402上存在残留物410。
图5、图6、图7及图8A分别示出在操作状态(例如,真空状态、温度状态、压力状态等)下拍摄真空壳体内部的图像的方法的一些实施例的剖视图500、600、700及800A,且图8B示出在操作状态下拍摄真空壳体内部的图像的方法的一些实施例的透视图800B。举例来说,这种方法可对应于和/或涉及用于图1A到图1C所示实施例的方法。尽管针对一种方法阐述了图5、图6、图7、图8A及图8B,然而应理解,图5、图6、图7、图8A及图8B中所公开的结构并非仅限于这种方法而是可独立于所述方法独立地作为结构。
如图5的剖视图500所示,真空壳体112包围晶圆夹盘114、光源106及所关注物体118。真空壳体112界定真空室101。在一些实施例中,真空室101可为用于进行沉积(例如,CVD、PVD等)、刻蚀、加热(例如,退火)、植入或使用真空室的半导体制造过程中的另一工艺的室。在一些实施例中,光源106可处于真空壳体112内,而在其他实施例中,光源106可不位于真空壳体112内。举例来说,在一些实施例中,可不需要光源106,且由此省略光源106。在一些实施例中,光源106可位于真空壳体112内的不同特征上(参见图1A所示光源106)。在一些实施例中,晶圆夹盘114在所关注物体118下方实质上居中。在一些实施例中,所关注物体118可具有由于在所关注物体118上存在缺陷(例如残留物积聚、侵蚀、剥离及破裂)而并非平面的底表面。在其他实施例中,所关注物体118可具有实质上均匀且无缺陷的底表面,在一些实施例中,所述底表面可由为平面的底表面表示。
如图6的剖视图600所示,通过真空壳体112中的开口604在真空壳体112内部加载602载体晶圆102。载体晶圆102可具有包括相机104的顶表面,且可将载体晶圆102的底表面加载602到晶圆夹盘114上。在一些实施例中,相机104包括位于相机壳体110内的图像传感器140及镜头108。此外,在一些实施例中,将具有相机104的载体晶圆102的大小设定成相似于在真空壳体112中在上面可沉积层的半导体晶圆。因此,可使用与半导体晶圆相同的传输器件将载体晶圆102加载602到真空室101中且载体晶圆102适当地适配在晶圆夹盘114上。
如图7的剖视图700所示,将载体晶圆102固定到晶圆夹盘114上。在一些实施例中,晶圆夹盘114是静电夹盘,且载体晶圆102被静电固持到晶圆夹盘114上。此外,对真空壳体112进行密封以界定真空室101,且在真空壳体112内部施加真空状态和/或其他操作状态。
如图8A的剖视图800A所示,将光源106无线控制成朝所关注物体118发射光804,且相机104分别以无线方式被控制成拍摄所关注物体118的图像数据802a、802b、802c。相机104可接着将图像数据发送到位于真空壳体112外部的无线接收器150以用于进行图像数据处理。举例来说,在一些实施例中,无线接收器150接收所关注物体118的多个交叠的图像,并对所述多个交叠的图像进行集成以在真空状态下产生所关注物体118的最终单个图像。在一些实施例中,相机104的图像传感器140是CMOS图像传感器并产生所关注物体118的2D图像。
图8B示出对应于图8A的剖视图800A的透视图800B。在一些实施例中,相机104分别同时拍摄图像802a、802b、802c。相机104的数目及相机104的布置分别被设计成拍摄示出真空壳体112内部的所关注物体118或所关注物体118的一部分的图像。举例来说,在所示实施例中,使用三个相机104拍摄所关注物体118的整个区域。
在相机104拍摄图像802a、802b、802c之后,可从真空室101移除载体晶圆102且可继续进行产生。通过在真空状态和/或其他操作状态下快速以无线方式检查真空室101的状态,可提前拍摄真空室101内的缺陷并对所述缺陷进行修复。
图9示出对应于图5、图6、图7、图8A及图8B的方法900的一些实施例的流程图。
尽管方法900在以下被示出及阐述为一系列动作或事件,然而应理解,这些动作或事件的所示次序并非被解释为限制意义。举例来说,可采用与除了本文中所示出和/或所阐述的动作或事件之外的其他动作或事件不同的次序和/或可同时进行一些动作。另外,可能并非需要所有所示出的动作来实施本文中的说明的一个或多个方面或实施例。此外,可采用一个或多个单独的动作和/或阶段施行本文中所绘制的动作中的一者或多者。
在动作902处,将晶圆加载到真空壳体中。晶圆包括面对真空壳体内部的所关注物体的相机。图6示出与动作902对应的一些实施例的剖视图600。
在动作904处,对真空壳体进行密封。
在动作906处,调整真空室的设置以使真空壳体在真空状态和/或其他操作状态下界定真空室。图7示出与动作904及906对应的一些实施例的剖视图700。
在动作908处,在处于真空状态和/或其他操作状态下的同时,使用相机以无线方式拍摄所关注物体的图像数据。
在动作910处,以无线方式将图像数据从相机发送到无线接收器以进行处理,其中无线接收器位于真空壳体外部。图8A及图8B分别示出与动作908及910对应的一些实施例的剖视图800A及透视图800B。
图10、图11、图12、图13A及图14A分别示出在真空状态下拍摄真空壳体内部的图像的方法的一些实施例的剖视图1000、1100、1200、1300A及1400A,且图13B及图14B分别示出在真空状态下拍摄真空壳体内部的图像的方法的一些实施例的透视图1300B及1400B。举例来说,这种方法可对应于和/或涉及用于图2A到图2C所示实施例的方法。尽管针对一种方法阐述了图10、图11、图12、图13A、图13B、图14A及图14B,然而应理解,图10、图11、图12、图13A、图13B、图14A及图14B中所公开的结构并非仅限于这种方法而是可独立于所述方法独立地作为结构。
如图10的剖视图1000所示,真空壳体112包围晶圆夹盘114、所关注物体118及校准标记116。所关注物体118可为用于进行膜沉积的材料或者可为真空壳体112内部的一些其他特征。真空壳体112界定真空室101。在一些实施例中,真空室101可为用于进行沉积(例如,CVD、PVD等)、刻蚀、加热(例如,退火)、植入或使用真空室101的半导体制造过程中的另一工艺的室。在一些实施例中,晶圆夹盘114在所关注物体118下方实质上居中。在其他实施例中,所关注物体118可偏离晶圆夹盘114的中心。
在一些实施例中,校准标记116被固定到真空壳体112的内部。校准标记116布置在晶圆夹盘114与所关注物体118之间的水平高度处。换句话说,晶圆夹盘114可位于距真空室101底部的第一距离d
如图11的剖视图1100所示,通过真空壳体112中的开口1104在真空壳体112内部加载1102载体晶圆102。载体晶圆102可具有包括相机104的顶表面,且可将载体晶圆102的底表面加载1102到晶圆夹盘114上。在一些实施例中,相机104是飞行时间(ToF)相机且包括相机壳体210内的传感器206及发射器208。在一些实施例中,将具有相机104的载体晶圆102的大小设定成相似于在真空壳体112中在上面可沉积层的半导体晶圆。因此,可使用与半导体晶圆相同的传输器件将载体晶圆102加载1102到真空室101中且载体晶圆102适当地适配在晶圆夹盘114上。
如图12的剖视图1200所示,将载体晶圆102固定到晶圆夹盘114上。在一些实施例中,晶圆夹盘114是静电夹盘,且载体晶圆102被静电固持到晶圆夹盘114上。此外,对真空壳体112进行密封以界定真空室101,且在真空壳体112内部应用真空状态和/或其他操作状态。相机104布置在距真空室101的底部第四距离d
如图13A的剖视图1300A所示,无线接收器150位于真空壳体112外部。相机104分别在真空状态下经历校准工艺1302。在一些实施例中,多个校准标记116中的每一个均被安置在相同的水平高度上。或者换句话说,如同水平线1304所示出地一般,这些校准标记116位于真空室101中的相同平面(plane)上。校准工艺1302涉及发射器208朝校准标记116发射辐射以及传感器206接收所反射的辐射。相机104分别经历校准工艺1302,且每一相机104校准到多于一个校准标记116以获得更精确及准确的校准工艺1302。相机104测量发射器208处的辐射发射从校准标记116离开以反射回传感器206所花费的时间。每一校准标记116处于距每一相机104的已知距离处。在一些实施例中,相机104分别将来自校准标记116的时间数据转换成所测量的距离以基于所测量的距离与已知距离的比较确定所需测量中的任何调整。在其他实施例中,相机104将时间数据发送到无线接收器150,且无线接收器150处理时间数据。然而,相机104的校准工艺1302在真空状态和/或其他操作状态下进行。
图13B示出与图13A的剖视图1300A对应的透视图1300B。在一些实施例中,每一相机104使用多于一个校准标记116来进行精确及准确的校准工艺1302。举例来说,在图13B中,相机104中的一者使用三个校准标记116来进行校准工艺1302。在一些实施例中,校准标记116中的一些可用于多于一个相机104,而在其他实施例中,校准标记116中的每一者不在相机104之间共享。然而,校准标记116的总数目对相机104的总数目的比率是多对一,或者换句话说,大于一,以使每一相机104可使用多个校准标记116以确保校准工艺1302是精确及准确的。
此外,在一些实施例中,每一相机104可在分开的非交叠的时间处经历校准工艺1302。举例来说,如图13B所示,相机104中的第一个相机104正在经历校准工艺1302,而其他两个相机104不经历校准工艺1302。接着,相机104中的第二个相机104将经历校准工艺1302,而其他两个相机104不经历校准工艺1302。最后,相机104中的第三个相机104将经历校准工艺1302,而其他两个相机104不经历校准工艺1302。在其他实施例(未示出)中,相机104可同时经历校准工艺1302。
如图14A的剖视图1400A所示,在一些实施例中,相机104中的每一者在真空状态和/或其他操作状态下收集真空室101中的所关注物体118的图像数据1402a、1402b、1402c。在一些实施例中,相机104同时收集图像数据1402a、1402b、1402c。每一相机104通过由发射器208发射许多辐射脉冲并确定在传感器206处接收到所反射的辐射脉冲所花费的时间来收集所关注物体118的区域的图像数据1402a、1402b、1402c。同时,相机104在所关注物体118的整个区域上收集图像数据1402a、1402b、1402c。图像数据可包括时间数据、距离数据或所关注物体118的参数。举例来说,相似于校准工艺(图13A所示1302),在一些实施例中,相机104分别将时间数据转换成距离,且接着以无线方式将距离发送到无线接收器150以进行处理。在其他实施例中,相机104以无线方式将时间数据发送到无线接收器150以进行处理。然而,相机104收集所关注物体118的图像数据1402a、1402b、1402c并以无线方式将图像数据发送到无线接收器150。无线接收器150接着处理图像数据以产生所关注物体118的3D轮廓。
图14B示出与图14A的剖视图1400A对应的透视图1400B。在一些实施例中,校准标记116被布置成使校准标记116不干扰图像数据1402a、1402b、1402c的收集。在相机104收集图像数据1402a、1402b、1402c之后,可从真空室101移除载体晶圆102且可继续进行产生。在一些实施例中,可在无线接收器150完成处理图像数据之前从真空室101移除载体晶圆102,而在其他实施例中,可在无线接收器完成处理图像数据之后移除载体晶圆102。通过利用相机104在真空状态和/或其他操作状态下快速以无线方式检查真空室101的状态,可提前拍摄并修复真空室101内的任何所识别的缺陷。
图15示出与图10、图11、图12、图13A、图13B、图14A及图14B对应的方法1500的一些实施例的流程图。
尽管方法1500在以下被示出及阐述为一系列动作或事件,然而应理解,这些动作或事件的所示次序并非被解释为限制意义。举例来说,可采用与除了本文中所示出和/或所阐述的动作或事件之外的其他动作或事件不同的次序和/或可同时进行一些动作。另外,可能并非需要所有所示出的动作来实施本文中的说明的一个或多个方面或实施例。此外,可采用一个或多个单独的动作和/或阶段施行本文中所绘制的动作中的一者或多者。
在动作1502处,将晶圆加载到真空壳体中。晶圆包括面对真空壳体内部的所关注物体的相机。图11示出与动作1502对应的一些实施例的剖视图1100。
在动作1504处,对真空壳体进行密封。
在动作1506处,调整真空壳体的设置以使真空壳体在真空状态和/或其他操作状态下界定真空室。图12示出与动作1506对应的一些实施例的剖视图1200。
在动作1508处,使用固定到真空壳体的校准标记来校准相机。图13A及图13B分别示出与动作1508对应的一些实施例的剖视图1300A及透视图1300B。
在动作1510处,在处于真空状态和/或其他操作状态下的同时,使用相机以无线方式拍摄所关注物体的图像数据。
在动作1512处,以无线方式将图像数据从相机发送到无线接收器以进行处理,其中无线接收器位于真空壳体外部。图14A及图14B分别示出与动作1510及1512对应的一些实施例的剖视图1400A及透视图1400B。
因此,在一些实施例中,本公开涉及集成到载体晶圆上的一个或多个相机以及用于在真空室处于真空状态和/或其他操作状态下的同时以无线方式拍摄真空室内部的图像以诊断真空室内的特征的缺陷的相关联的方法。
因此,在一些实施例中,本公开涉及一种工艺工具,所述工艺工具包括:壳体,界定真空室;晶圆夹盘,位于所述壳体中;载体晶圆,位于所述晶圆夹盘上;相机,集成在所述载体晶圆上,其中所述相机面对所述壳体的顶部且被配置成以无线方式拍摄所述壳体内的所关注物体的图像;以及无线接收器,位于所述壳体外部且被配置成在所述真空室被密封的同时以无线方式从所述相机接收所述图像。
在一些实施例中,所述所关注物体处于所述壳体的所述顶部且直接上覆在所述相机上。在一些实施例中,所述所关注物体包括用于进行物理气相沉积的靶材料。在一些实施例中,所述所关注物体是用于进行化学气相沉积的喷淋头。在一些实施例中,更包括被固定到所述壳体的内侧壁的多个校准标记,其中所述校准标记中的每一者布置在距所述晶圆夹盘的中心相同的距离处。在一些实施例中,所述载体晶圆更包括耦合到所述相机的电池源。
在其他实施例中,本公开涉及一种工艺工具,所述工艺工具包括:室壳体,界定真空室;所关注物体,位于所述真空室的上部部分内;晶圆夹盘,位于所述真空室的下部部分内;载体晶圆,设置在所述晶圆夹盘上,其中所述载体晶圆的顶表面面对所述所关注物体的底表面;以及第一相机,位于所述载体晶圆上且面对所述所关注物体,其中所述第一相机被配置成以无线方式测量所述所关注物体的参数。
在一些实施例中,更包括:无线接收器,位于所述室壳体外部,其中所述无线接收器被配置成处理来自所述第一相机的测量值。在一些实施例中,所述第一相机包括互补金属氧化物半导体(CMOS)图像传感器,所述互补金属氧化物半导体(CMOS)图像传感器被配置成以无线方式拍摄所述所关注物体的二维图像。在一些实施例中,更包括:光源,位于所述室壳体内且被配置成当所述第一相机以无线方式测量所述所关注物体的所述参数时以无线方式施加光。在一些实施例中,更包括:第二相机,位于所述载体晶圆上且被配置成以无线方式测量所述所关注物体的第一区域的参数,且其中所述第一相机被配置成以无线方式测量所述所关注物体的第二区域的参数。在一些实施例中,所述第一相机是飞行时间(ToF)相机,所述飞行时间相机包括朝所述所关注物体发射辐射的发射器及接收所述辐射的反射的传感器。在一些实施例中,更包括:校准标记,设置在所述室壳体的内侧壁上,其中所述校准标记中的每一校准标记布置在距所述室壳体的下表面第一距离处,其中所述第一距离是沿着与所述室壳体的所述下表面垂直的线从所述校准标记中的每一校准标记到所述室壳体的所述下表面进行测量,且其中所述校准标记位于所述所关注物体与所述第一相机之间。在一些实施例中,所述校准标记的总数目对所述相机的总数目的比率大于一。
在又一些实施例中,本公开涉及一种在工艺工具的内部拍摄图像数据的方法,所述方法包括:将晶圆加载到由真空壳体界定的真空室中,其中所述晶圆包括相机,所述相机集成在所述晶圆的顶表面上;对所述真空室进行密封,以使所述真空室处于操作状态下;在所述真空室处于所述操作状态下的同时,使用所述相机以无线方式拍摄所述真空壳体的内部的图像数据;以及将所述图像数据发送到无线接收器以处理所述图像数据,其中所述无线接收器位于所述真空室外部。
在一些实施例中,所述相机面对布置在所述真空室的顶部附近的所关注物体,且其中所述图像数据描述所述所关注物体。在一些实施例中,在所述对所述真空室进行密封之后且在所述拍摄所述图像数据之前,所述方法更包括根据在所述真空室中设置在所述真空壳体的侧壁上的校准标记对所述相机进行校准。在一些实施例中,所述拍摄所述图像数据包括计算发射辐射与接收到所述辐射从所述真空壳体的所述内部的反射之间的时间。在一些实施例中,在将所述晶圆加载到所述真空室中之前,从所述真空壳体移除已经过处理的晶圆。在一些实施例中,所述操作状态包括真空状态、温度状态和/或压力状态。
以上概述了若干实施例的特征,以使所属领域中的技术人员可更好地理解本公开内容的各个方面。所属领域中的技术人员应知,他们可容易地使用本公开内容作为设计或修改其他工艺及结构的基础来施行与本文中所介绍的实施例相同的目的和/或实现与本文中所介绍的实施例相同的优点。所属领域中的技术人员还应认识到,这些等效构造并不背离本公开内容的精神及范围,而且他们可在不背离本公开内容的精神及范围的状态下对其作出各种改变、代替及变更。
- 工艺工具及在其内部拍摄图像数据的方法
- 图像拍摄设备、拍摄图像数据记录方法、和拍摄图像数据处理设备及方法