一种火龙果去皮加工装置
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及一种火龙果去皮加工装置。
背景技术
火龙果(学名:Hylocereus undatus'Foo-Lon')是仙人掌科、量天尺属量天尺的栽培品种,攀援肉质灌木,具气根。火龙果性甘平,主要营养成分有蛋白质、膳食纤维、维生素B2、维生素B3、维生素C、铁、磷、钙、镁、钾等。
火龙果可加工制成的产品有火龙果汁、火龙果酱、火龙果酒等。
现有的火龙果,加工流程为:火龙果去皮,取出果肉,再将果肉进行加工。
然而,现有技术中缺乏完整的火龙果去皮加工装置;如中国专利申请文件CN106472907A公开了一种火龙果汁的加工工艺、CN107183433A公开了一种火龙果果汁及其加工方法、CN107361190A公开了一种火龙果果脯的加工方法、CN105876292A公开了一种火龙果果酱的加工制作方法等,这些专利申请文件均只是给出了加工工艺,但是,却没有给出了相应的加工配套装置。可见,为了实现火龙果加工,则需研制出一种适用于火龙果加工所需的装置。
发明内容
本发明的目的是针对现有技术缺陷,而提供一种火龙果去皮加工装置。
为了实现上述本发明的目的,采取如下技术方案:
一种火龙果去皮加工装置,包括传动部、支撑架、传送托起件、第一支撑架、第一视觉传感器、第二视觉传感器、第二支撑架、切刀驱动件、切刀、第三视觉传感器、第三支撑架、第一推动部、抓取果肉件、滑套、导轨、激光发射器、制浆部;所述传动部安装于支撑架,在其上沿纵向间隔并行设置多个传送托起件;所述第一支撑架、第二支撑架、第三支撑架间隔并行安装于支撑架的侧面;所述第一视觉传感器安装于第一支撑架;所述第二视觉传感器、切刀驱动件并行设置于第二支撑架,所述切刀驱动件具有切刀;所述第一推动部、导轨并行安装于第三支撑架的底部;所述抓取果肉件通过滑套滑动安装于导轨;所述第三视觉传感器并行第一推动部安装于第三支撑架,且位于第一推动部的底部;所述激光接收器安装于传动托起件,所述激光发射器安装于传动部的传动末端,所述激光接收器和激光发射器匹配对应信号连接;所述制浆部安装于第三支撑架,并位于导轨的底部;所述控制模块设置于支撑架的侧面;其中,所述传动部、传送托起件、第一视觉传感器、第二视觉传感器、切刀驱动件、第三视觉传感器、第一推动部、抓取果肉件、激光接收器、激光发射器、制浆部均与控制模块电连接。
工作原理:
所述传动部、传送托起件、第一视觉传感器、第二视觉传感器、切刀驱动件、第三视觉传感器、第一推动部、抓取果肉件、激光接收器、激光发射器制浆部均与控制模块电连接;
起始工作:传动部启动,带动其上的传送托起件移动至第一视觉传感器,第一视觉传感器探测到传送托起件,向控制模块发送信号,控制模块根据该信号控制传动部暂停传送,传送托起件停至初始位置,然后,将火龙果放置传送托起件上,传送托起件托起火龙果,传送托起件放置火龙果后,向控制模块发送信号,控制模块根据该信号控制传动部启动传送;
切除火龙果顶部:传送部带动传送托起件移动至第二视觉传感器,第二视觉传感器即刻向控制模块发送信号,控制模块根据该控制信号控制传动部暂停传送的同时,启动切刀驱动件,切刀驱动件推动切刀向火龙果推进,并将火龙果的顶部进行切除(切除高度为2至3厘米),切除后,切刀驱动件自动复位,第二视觉传感器观测到火龙果已被切除顶部,则向控制模块发送信号,控制模块根据该信号启动传动部,传动部带动传送托起件传动;
取火龙果果肉:传送部带动传送托起件移动至第三视觉传感器,第三视觉传感器探测到传送托起件带火龙果传送至与其对应位置,则向控制模块发送信号,控制模块根据该信号控制传送部暂停移动的同时,第三视觉传感器实时观测抓取果肉件的抓取动作,并同时与控制模块进行信号实时交互;传送托起件箍套火龙果的外壳,抓取果肉件沿火龙果壳的内侧面插入,抓取果肉件下降至预定行程时,抓取果肉向上提取,第三视觉传感器观测到抓取果肉件将果肉提出果壳,保持提取状态,则向控制模块发送信号,控制模块根据该信号控制传动部启动传动和第一推动部推动抓取果肉件向制浆部移动,当第一推动部伸长至预定行程时,则向控制模块发送信号,控制模块再根据该信号控制抓取果肉件解除抓取动作,即抓取果肉件打开,火龙果肉掉落至制浆部,火龙果果肉在制浆部内被粉碎制浆;
去除果壳;传动部带动传送托起件移动至传动部的传动末端,传送托起件上的激光接收器接收至激光发射器上的信号时,激光接收器则向控制模块发送信号,控制模块根据该信号控制传送托起件解除抱箍果壳的动作,果壳在自身重力作用下,向下掉落,与传送托起件脱离。以上述操作动作进行重复循环,完成火龙果加工。作为本领域的公知常识,本方案使用的控制模块及其与之相连的各装置的动作控制属于成熟的单片机技术,可以轻易的从市场上购买得到,经简单调试后即可使用。
作为技术方案的进一步改进,所述果肉抓取件包括第二推动部、抓取支架、第三推动部支架、第三推动部、抓取件、第一支撑杆和第二支撑杆;所述第二推动部具有推动杆;所述抓取支架安装于该推动杆上;所述第三推动部安装于抓取支架内;所述第二支撑杆安装于抓取支架外侧;所述抓取件铰接于第二支撑杆;所述第一支撑杆的一端与第三推动部铰链连接,其另一端与抓取件铰链连接;其中,所述第二推动部、第三推动部和控制模块电连接。
作为技术方案的进一步改进,所述传送托起件包括支撑座、支撑杆、旋转筒体、限位筒、压力传感器、抱箍件、松紧部和驱动电机;所述支撑座和限位筒通过支撑杆连接;所述旋转筒体的一端插入限位筒内,并与限位筒转动连接;所述旋转筒体的另一端插入支撑座,并与支撑座转动连接;所述驱动电机安装于支撑座,且该驱动电机与旋转筒体传动连接;该驱动电机驱动该旋转筒体旋转;所述压力传感器安装于旋转筒体的顶部;所述松紧部的一端安装于旋转筒体内,其另一端依次贯穿旋转筒体的顶部及压力传感器,且该端上安装有抱箍件。
作为技术方案的进一步改进,所述松紧部包括第一夹体、第二夹体、第一推拉杆、第二推拉杆、导向筒和伸缩驱动部;所述第一夹体、第二夹体分别铰接于旋转筒体的内侧面,且相互对齐;所述第一推拉杆的一端铰接于第一夹体,其另一端连接于导向筒的一侧;所述第二推拉杆的一端铰接于第二夹体,其另一端连接于导向筒的另一侧;所述导向筒与伸缩驱动部连接;所述伸缩驱动部安装于旋转筒体内;其中,所述伸缩驱动部和控制模块电连接。
作为技术方案的进一步改进,所述制浆部包括盛料件、搅拌刀、搅拌轴和搅拌驱动电机;所述盛料件设有敞口的可容置空间;所述搅拌轴的一端贯穿于盛料件的底部延伸至所述可容置空间,其另一端与搅拌驱动电机传动连接;所述搅拌刀安装于该搅拌轴;其中,所述搅拌驱动电机和控制模块电连接。
作为技术方案的进一步改进,本发明火龙果去皮加工装置还包括电磁阀、抽料泵、过滤器;所述电磁阀的一端与制浆部连接,其另一端和抽料泵的一端连接;所述抽料泵的另一端连接过滤器;其中,所述电磁阀、抽料泵和控制模块电连接。
作为技术方案的进一步改进,本发明火龙果去皮加工装置还包括触摸显示器和显示器支架;所述触摸显示器安装于显示器支架;所述显示器支架安装于支撑架侧面;其中,所述触摸显示器和控制模块电连接。
作为技术方案的进一步改进,本发明火龙果去皮加工装置还包括第一定位传感器和第二定位传感器;所述第一定位传感器、第二定位传感器相对应安装于导轨;其中,所述第一定位传感器、第二定位传感器和控制模块电连接。
作为技术方案的进一步改进,本发明火龙果去皮加工装置还包括果皮导料槽、果顶导料槽;所述果顶导料槽对应于切刀驱动件安装于支撑架;所述果皮导料槽设置于传动部的传动方向末端,并固定安装于支撑架。
本发明相对于现有技术所具有的进步:
1.本发明能实现火龙果取出果肉和去除果皮的生产工艺;定位部用于控制放置火龙果,削皮部用于对火龙果实现削皮,果肉切片部用于对削皮后的火龙果肉进行切片;而切片所得的果肉片滑落至导料传动部,导料传动部将果肉片及时传送至进料传动部,进料传动部将果肉片送至烘干机,烘干机对果肉片进行烘干;克服现有火龙果加工果肉堆积的问题;能有效提高果肉片的完整性,进一步提高火龙果果肉片的品质。
2.本发明传送托起件能通过松紧部对火龙果的果壳外表面进行抱箍;而且传送托起件上的旋转筒体在安装于支撑座上的驱动电机驱动旋转,能有利于火龙果果肉切除工作;松紧部的工作方式为:在起始位置时,松紧部实现抱箍火龙果的果壳外表面,随着传动部传动,当传动至传动部末端时,传送托起件上的激光接收器接收到安装于支撑架上的激光发射器发送的信号,激光接收器将信号传送至控制模块,控制模块控制松紧部松开火龙果的果壳,实现去除果壳目的。
3.本发明的抓取果肉件在第一推动部和滑套作用下沿导轨滑动,抓取果肉件对齐削顶后的火龙果沿内侧面插入果肉内,抓取火龙果的果肉;而在抓取果肉件抓取火龙果果肉时,传送托起件旋转,辅助抓取果肉件将火龙果果皮和果肉分离。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
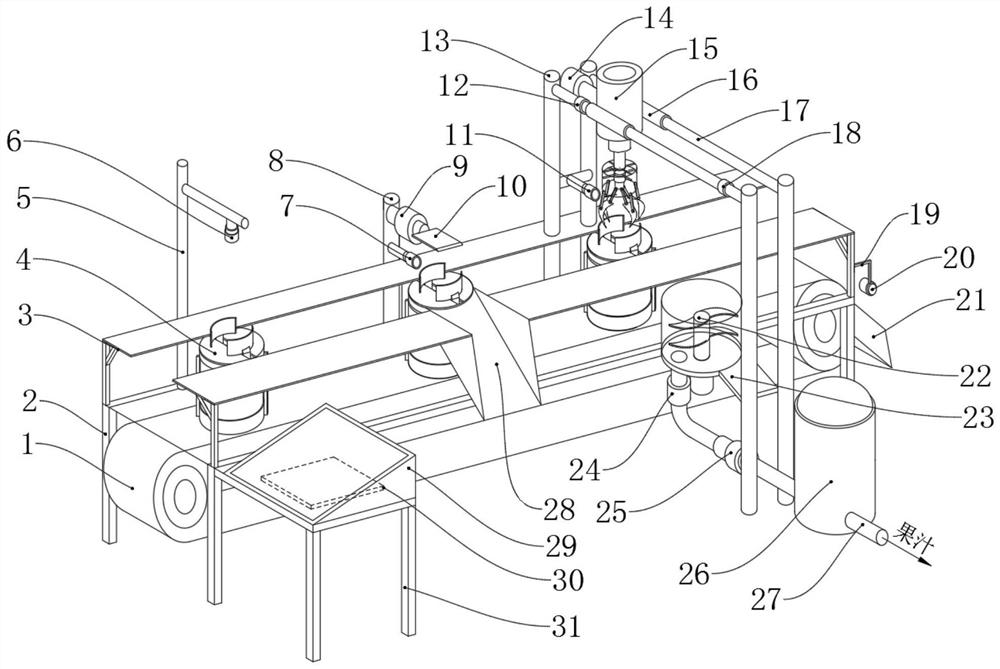
图1为本发明一种火龙果去皮加工装置的结构示意图;
图2为取果肉部的结构示意图;
图3为抓取果肉件的结构示意图;
图4为传送托起件的结构示意图;
图5为图4的内部结构示意图;
图6为松紧件的结构示意图;
图7为制浆及过滤的结构示意图;
图8为制浆部的结构示意图;
图9为切刀驱动件和切刀的结构示意图;
图中各部件名称及序号:1-传动部,2-支撑架,3-支撑台,4-传送托起件,41-支撑座,42-支撑杆,43-旋转筒体,44-限位筒,45-压力传感器,46-抱箍件,47-松紧部,471-第一夹体,472-第二夹体,473-第一铰接孔,474-第二铰接孔,475-第一推拉杆,476-第二推拉杆,478-导向筒,479-伸缩驱动部,48-导向槽,49-松紧部支架,410-驱动电机,5-第一支撑架,6-第一视觉传感器,7-第二视觉传感器,8-第二支撑架,9-切刀驱动件,10-切刀,101-刀刃,102-斜面板,11-第三视觉传感器,12-第一定位传感器,13-第三支撑架,14-第一推动部,15-抓取果肉件,151-第二推动部,152-抓取支架,153-第三推动部支架,154-第三推动部,155-抓取件,156-第一支撑杆,157-第二支撑杆,16-滑套,17-导轨,18-第二定位传感器,19-激光发射器架,20-激光发射器,21-果皮导料槽,22-制浆部,221-盛料件,222-搅拌刀,223-搅拌驱动电机,224-搅拌轴,23-制浆部支架,24-电动阀,25-抽料泵,26-过滤器,27-滤液排放管,28-果顶导料槽,29-触摸显示器,30-控制模块,31-显示器支架,32-激光接收器。
具体实施方式
为了使本技术领域的人员更好的理解本申请中的技术方案,下面将结合附图和实施例来对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请的一部分实施例,基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
实施例1:
如图1至8所示,一种火龙果去皮加工装置,包括传动部1、支撑架2、传送托起件4、第一支撑架5、第一视觉传感器6、第二视觉传感器7、第二支撑架8、切刀驱动件9、切刀10、第三视觉传感器11、第三支撑架13、第一推动部14、抓取果肉件15、滑套16、导轨17、激光发射器20、制浆部22;所述传动部1安装于支撑架2,在其上沿纵向间隔并行设置多个传送托起件4;所述第一支撑架5、第二支撑架8、第三支撑架13间隔并行安装于支撑架2的侧面;所述第一视觉传感器6安装于第一支撑架5;所述第二视觉传感器7、切刀驱动件9并行设置于第二支撑架8,所述切刀驱动件9具有切刀10;所述第一推动部14、导轨17并行安装于第三支撑架13的底部;所述抓取果肉件15通过滑套16滑动安装于导轨17;所述第三视觉传感器13并行第一推动部14安装于第三支撑架13,且位于第一推动部14的底部;所述激光接收器32安装于传动托起件4,所述激光发射器20安装于传动部1的传动末端,所述激光接收器32和激光发射器20匹配对应信号连接;所述制浆部22安装于第三支撑架13,并位于导轨17的底部;所述控制模块30设置于支撑架2的侧面;其中,所述传动部1、传送托起件4、第一视觉传感器6、第二视觉传感器7、切刀驱动件9、第三视觉传感器11、第一推动部14、抓取果肉件15、激光接收器32、激光发射器20、制浆部22均与控制模块030电连接。
具体的工作方式:
所述传动部1、传送托起件4、第一视觉传感器6、第二视觉传感器7、切刀驱动件9、第三视觉传感器11、第一推动部14、抓取果肉件15、激光接收器32、激光发射器20、制浆部22均与控制模块电连接;
起始工作:传动部1启动,带动其上的传送托起件4移动至第一视觉传感器6,第一视觉传感器6探测到传送托起件4,向控制模块30发送信号,控制模块30根据该信号控制传动部1暂停传送,传送托起件4停至初始位置,然后,将火龙果放置传送托起件4上,传送托起件4托起火龙果,传送托起件4放置火龙果后,向控制模块30发送信号,控制模块30根据该信号控制传动部1启动传送;
切除火龙果顶部:传送部1带动传送托起件4移动至第二视觉传感器7,第二视觉传感器7即刻向控制模块30发送信号,控制模块30根据该控制信号控制传动部1暂停传送的同时,启动切刀驱动件9,切刀驱动件9推动切刀10向火龙果推进,并将火龙果的顶部进行切除,切除高度为2至3厘米,切除后,切刀驱动件9自动复位,第二视觉传感器7观测到火龙果已被切除顶部,则向控制模块30发送信号,控制模块30根据该信号启动传动部1,传动部1带动传送托起件4传动;
取火龙果果肉:传送部1带动传送托起件4移动至第三视觉传感器11,第三视觉传感器11探测到传送托起件4带火龙果传送至与其对应位置,则向控制模块30发送信号,控制模块30根据该信号控制传送部1暂停移动的同时,第三视觉传感器11实时观测抓取果肉件15的抓取动作,并同时与控制模块30进行信号实时交互;传送托起件4箍套火龙果的外壳,抓取果肉件15沿火龙果壳的内侧面插入,抓取果肉件下15降至预定行程时,控制模块根据该预定行程控制传送托起件4旋转,辅助抓取果肉件15切割果肉,使得果肉和果皮分离,抓取果肉件15向上提取果肉复位,并保持抓取状态;第三视觉传感器11观测到抓取果肉件15将果肉提出果壳,保持提取状态,则向控制模块30发送信号,控制模块30根据该信号控制传动部1启动传动和第一推动部14推动抓取果肉件15向制浆部22移动,当第一推动部14伸长至预定行程时,则向控制模块30发送信号,控制模块30再根据该信号控制抓取果肉件15解除抓取动作,即抓取果肉件打开,火龙果肉掉落至制浆部22,火龙果果肉在制浆部22内被粉碎制浆;
去除果壳;传动部1带动传送托起件4移动至传动部1的传动末端,传送托起件4上的激光接收器32接收至激光发射器20上的信号时,激光接收器32则向控制模块30发送信号,控制模块30根据该信号控制传送托起件4解除抱箍果壳的动作,果壳在自身重力作用下,向下掉落,与传送托起件4脱离。以上述操作动作进行重复循环,完成火龙果加工。
本发明火龙果去皮加工装置进入正常生产加工状态后,传动部的启、停由第三视觉传感器向控制模块发送相对应的控制指令。
本发明的第一视觉传感器和第二视觉传感器、第二视觉传感器和第三视觉传感器的间距均是等于相邻两个传动托起件的间距;传动部的每一次传动的距离为一个传动托起件之间的间距。
实施例2:
与实施例1相比,区别之处在于:给出了果肉抓取件的一种结构形式。
如图3所示,所述果肉抓取件15包括第二推动部151、抓取支架152、第三推动部支架153、第三推动部154、抓取件155、第一支撑杆156和第二支撑杆157;所述第二推动部151具有推动杆;所述抓取支架152安装于该推动杆上;所述第三推动部154安装于抓取支架152内;所述第二支撑杆157安装于抓取支架152外侧;所述抓取件155铰接于第二支撑杆157;所述第一支撑杆156的一端与第三推动部154铰链连接,其另一端与抓取件155铰链连接;其中,所述第二推动部151、第三推动部154和控制模块30电连接。
工作方式:
第二推动部151根据控制模块内预先设定的行程路线工作,第二推动部151带动抓取支架152以及安装于抓取支架152上的各部件移动;
第二推动部151带动抓取支架152向下移动至设定行程时,向控制模块30发送控制指令,控制模块根据该控制指令控制第三推动部154启动,第三推动部154向上拉动第一支撑杆156,第一支撑杆156带动抓取件155相对于第二支撑杆157向上摆动,抓取件155抓取火龙果果肉的同时,控制模块30根据第二推动部151的下降行程控制传送托起件4旋转,进而能使得抓取件155切割果肉,果肉和果皮分离;并在第二推动部151驱动下,抓取件155跟随抓取支架152复位,抓取件155抓取果肉上移,使得果肉和果壳脱离;控制模块30控制第一推动部14推动抓取果肉件15在滑套16作用下沿导轨17滑动至制浆部22的上方,第一推动部14移动至设定行程路线时,向控制模块30发送信号指令,控制模块根据该信号指令控制赚钱果肉件15上的第三推动部154向下推动第一支撑杆156,第一支撑杆156推动抓取件155相对于第二支撑杆157向下摆动,使得抓取件155呈打开状态,火龙果果肉在自身重力作用下掉落制浆部22的同时,第一推动部14带动抓取果肉件15复位。
实施例3:
与实施例1或2相比,区别之处在于:给出了传送托起件的一种结构形式。
如图4-6所示,所述传送托起件4包括支撑座41、支撑杆42、旋转筒体43、限位筒44、压力传感器45、抱箍件46、松紧部47和驱动电机410;所述支撑座41和限位筒44通过支撑杆42连接;所述旋转筒体43的一端插入限位筒44内,并与限位筒44转动连接;所述旋转筒体43的另一端插入支撑座41,并与支撑座41转动连接;所述驱动电机410安装于支撑座41,且该驱动电机410与旋转筒体43传动连接;该驱动电机410驱动该旋转筒体43旋转;所述压力传感器45安装于旋转筒体43的顶部;所述松紧部47的一端安装于旋转筒体43内,其另一端依次贯穿旋转筒体43的顶部及压力传感器45,且该端上安装有抱箍件46。
所述传送托起件4的顶部开设有导向槽48,该导向槽48用于松紧部47可在传送托起件4的顶部横向滑动,利于松紧部控制抱箍件抱箍火龙果。
为了便于松紧部安装于旋转筒体内,在旋转筒体43内安装有松紧部支架49,该松紧部支架49用于安装松紧部47。
传送托起件的工作方式:
传送托起件4在第一视觉传感器6作用下,控制传动部1暂停传送,传送托起件4处于起始位置;然后,向传送托起件4上放入火龙果,火龙果呈竖直放置,火龙果对压力传感器45有挤压作用,压力传感器45探测到压力则向控制模块30发送控制信号,控制模块30根据该信号控制松紧部47抱箍火龙果果壳,第一视觉传感器6探测到火龙果已被完整放置于传送托起件4则向控制模块发送信号,控制模块30根据该信号控制传动部1启动传送。
所述第一视觉传感器6具有至少两个作用:
一是,本发明初次工作启动时,用于判定传动部上的传送托起件是否已停至起始位置;若传送托起件已位于起始位置,则第一视觉传感器6向控制模块30发送信号,控制模块30根据该信号控制传动部1暂停传送,便于向传送托起件4上放置火龙果;进入正常加工工作。
二是,视觉检测传送托起件上是否已有芒果,若是传送托起件上没有芒果,而此时传动部启动传动,则第一视觉传感器6即刻向控制模块30发送警报信号,控制模块30自主控制传动部停止工作。
旋转筒体43、驱动电机410的工作方式:
驱动电机410和抓取果肉件15协同作用,抓取果肉件15用于抓取火龙果果肉,其行走的行程路线预先设定于控制模块30内,抓取果肉件15的行程路线可分为下降路线和上升复位路线;当控制模块30控制抓取果肉件15下降至下降路线的最低点时,向渠道电机410发送控制指令,控制驱动电机410启动工作,驱动电机410驱动旋转筒体43发送旋转,旋转筒体43带动松紧部47旋转,松紧部47带动火龙果旋转,实现抓取果肉件15切割果肉动作,果肉和果皮分离。
实施例4:
与实施例3相比,区别之处在于:给出了松紧部的一种结构形式。
所述松紧部47包括第一夹体471、第二夹体472、第一推拉杆475、第二推拉杆476、导向筒478和伸缩驱动部479;所述第一夹体471、第二夹体472分别铰接于旋转筒体43的内侧面,且相互对齐;所述第一推拉杆475的一端铰接于第一夹体471,其另一端连接于导向筒478的一侧;所述第二推拉杆476的一端铰接于第二夹体472,其另一端连接于导向筒478的另一侧;所述导向筒478与伸缩驱动部479连接;所述伸缩驱动部479安装于旋转筒体43内;其中,所述伸缩驱动部479和控制模块30电连接。
而为了便于第一夹体471、第二夹体472铰接于旋转筒体43,第一夹体471上设有第一铰接孔473,利用第一铰接孔473与旋转筒体43进行铰接,能利于第一夹体471相对于旋转筒体43摆动;第二夹体472上设有第二铰接孔474,利用第二铰接孔474与旋转筒体43进行铰接,能利于第二夹体472相对于旋转筒体43摆动。
所述伸缩驱动部479与控制模块30电连接,伸缩驱动部479可采用液压缸、气压缸或丝杠机构等可实现直线往复运动的机构。
为了便于在旋转筒体43能安装伸缩驱动部479,旋转筒体43内安装有松紧部支架49,松紧部支架49用于支撑固定伸缩驱动部479。
松紧部的工作方式:
夹紧工作:伸缩驱动部479下拉导向筒478,导向筒478带动第一推拉杆475、第二推拉杆476向下移动,从而第一推拉杆475、第二推拉杆476分别对应带动第一夹体471、第二夹体472相向摆动,第一夹体471、第二夹体472之间的间距变小;实现夹紧工作;
松开工作:伸缩驱动部479上推导向筒478,导向筒478带动第一推拉杆475、第二推拉杆476向上移动,从而第一推拉杆475、第二推拉杆476分别对应向下推动第一夹体471、第二夹体472背向摆动,第一夹体451、第二夹体452之间的间距变大;实现松开工作。
实施例5:
与实施例1-4任一相比,区别之处在于:给出了制浆部的一种结构形式。
所述制浆部22包括盛料件221、搅拌刀222、搅拌轴224和搅拌驱动电机223;所述盛料件221设有敞口的可容置空间;所述搅拌轴224的一端贯穿于盛料件221的底部延伸至所述可容置空间,其另一端与搅拌驱动电机223传动连接;所述搅拌刀222安装于该搅拌轴224;其中,所述搅拌驱动电机223和控制模块30电连接。
制浆部的工作方式:搅拌驱动电机223带动搅拌轴224旋转,旋转轴224带动安装于其上的搅拌刀222旋转,旋转后的搅拌刀222切割粉碎位于盛料件221内的火龙果果肉,随着搅拌懂啊222旋转击打粉碎,制得火龙果浆。
实施例6:
与实施例1-5任一相比,区别之处在于:增加安装有电磁阀24、抽料泵25、过滤器26。
如图1和7所示,所述电磁阀24的一端与制浆部22连接,其另一端和抽料泵25的一端连接;所述抽料泵25的另一端连接过滤器;其中,所述电磁阀24、抽料泵25和控制模块30电连接。
工作方式:
制浆部22内制得火龙果浆后,控制模块30可向电磁阀24、抽料泵25发送控制指令,控制电磁阀24打开,抽料泵25启动,抽料泵25抽取制浆部22内的火龙果浆,经抽料泵25输送至过滤器26,火龙果浆在过滤器26内进行过滤,滤除不容物质,取得火龙果汁。所得火龙果汁可制成火龙果汁、火龙果饮料、火龙果酒等。
实施例7:
与实施例6相比,区别之处在于:增加安装有触摸显示器29和显示器支架31。
如图1所示,所述触摸显示器29安装于显示器支架31;所述显示器支架31安装于支撑架2侧面;其中,所述触摸显示器29和控制模块30电连接。
触摸显示器29显示传动部1、第一视觉传感器6、传送托起件4、第二视觉传感器7、切刀驱动件9、第三视觉传感器11、第一推动部14、抓取果肉件15、制浆部22、电磁阀24、抽料泵25的工况。
实施例8:
与实施例6或7相比相比,区别之处在于:增加安装有第一定位传感器12和第二定位传感器18。
如图1所示,所述第一定位传感器12、第二定位传感器18相对应安装于导轨17;其中,所述第一定位传感器12、第二定位传感器18和控制模块30电连接。
所述第一定位传感器12、第二定位传感器18用于辅助监测抓取果肉件15在导轨17上滑动的位置,第一定位传感器12用限定抓取果肉件15的初始位置,以便于第一推动部14带动抓取果肉件15复位;第二定位传感器18用于限定抓取果肉件15沿导轨17上滑动的间距的同时,能利于准确测定抓取果肉件15移动至制浆部22的正上方,进而能利于抓取果肉件15将火龙果果肉卸至制浆部22内。
实施例9:
与实施例1-8任一相比,区别之处在于:增加安装有果皮导料槽21、果顶导料槽28。
如图1所示,所述果顶导料槽28对应于切刀驱动件9安装于支撑架2;所述果皮导料槽21设置于传动部1的传动方向末端,并固定安装于支撑架2。
所述果皮导料槽21用于将去除果肉后剩余的火龙果外壳进行集中导向,便于将火龙果外壳进行集中收集。
所述果顶导料槽28用于将切刀切割出的火龙果顶部进行导向排放,便于将切除出的火龙果顶部集中收集。
实施例10:
与实施例1-9任一相比,区别之处在于:给出了切刀的一种结构形式。
如图9所示,所述切刀10具有刀刃101和斜面板102,该刀刃101设置于切刀10的本体,而斜面板102设置于刀刃101和导体连接处。斜面板102能用于推动刀刃101切割火龙果顶部时,将切除出的火龙果顶部推入果顶导料槽28。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之内。
- 一种火龙果去皮加工装置
- 一种火龙果用去皮装置