数字光刻系统的多基板处理
文献发布时间:2023-06-19 09:29:07
技术领域
本文描述的实施例大致关于电子元件制造领域,且特别是有关于一种在无掩模光刻系统(maskless lithography system)中同时处理多个基板或单个基板的装置及其相关方法。
背景技术
无掩模光刻,例如直写式数字光刻(direct write digital lithography),经常用来制作使用薄膜晶体管(TFT)来进行操作的平板显示器(FPDS)。多个显示元件通常在单一大面积的矩形薄玻璃板(此处是面板)上制造,之后可将面板分成单独的显示元件,例如计算机监视器屏幕、触控面板元件屏幕、手机屏幕和电视屏幕。典型的直写式数字光刻工艺是使用一个或多个光刻曝光光源(例如,紫外光(UV)光源),将辐射引导和/或聚焦到沉积于面板表面上的光敏光阻层的表面上方或下方。面板通常设置并固定在运动台上,运动台可以在光刻曝光光源下方移动面板,从而在光阻层中形成所需的图案。对于大面积面板,直写式数字光刻处理系统包括多个光刻曝光光源,当承载面板的运动台在光刻曝光光源下方移动时,每个光刻曝光光源被配置用来在一部分的面板上进行图案曝光。有鉴于规模经济的考虑,设计用来加工和处理较大面积基板的处理系统,通常较优于较小处理系统。
然而,使较大处理系统适于制造平板显示器的相同规模经济,导致相同的处理系统并不适于用来处理较小的基板,例如芯片级半导体元件封装方案中所使用的基板。这是因为这种处理系统通常配置为一次仅处理一个基板,使得处理系统的尺寸和成本不利于处理较小基板。
因此,需要一种在直写式数字光刻系统中同时处理多个基板的装置及方法。
发明内容
本文所述的实施例一般是关于电子元件制造领域,特别是有关于在无掩模光刻系统,例如数字直写式光刻系统中同时处理多个基板的方法以及与其相关的装置。
在一个实施例中,一种处理多个基板的方法,包括将多个基板定位在处理系统的基板载体上。此处,所述处理系统包括基座、设置在基座上的运动台(motion stage)、设置在运动台上的基板载体、设置在基座的表面上方并与基座的表面分离的桥接器(bridge)、以及设置在桥接器上的多个光学模块。此方法还包括:将基板载体定位在多个光学模块的下方,对多个基板中的每一个基板进行独立的水平校准(leveling),判定多个基板中每一个基板的偏移信息,根据多个基板中每一个基板的偏移信息产生图案化指令,使用多个光学模块对多个基板中的每一个基板进行图案化。
在另一实施例中,基板载体包括多个载体模块。每个载体模块包括:底板(baseplate)、设置在底板上的多个Z方向致动器(Z direction-actuators)以及设置在多个Z方向致动器上方的承载板。
在又一个实施例中,一种处理系统包括基座、设置在基座上的运动台、设置在运动台上的基板载体,所述基板载体包括多个载体模块、设置在基座的表面上方并与基座的表面分离的桥接器、以及设置在桥接器上的多个光学模块。
附图说明
为了对本公开的上述特征有更佳的了解,下文特举更具体的实施例,对以上概述的公开内容进行详细说明,一些实施例绘示于附图中。然而,应注意的是,附图仅是本公开的特定实施例的例示,并非用以限制其范围,上述公开仍可适用于其他同等有效的实施例。
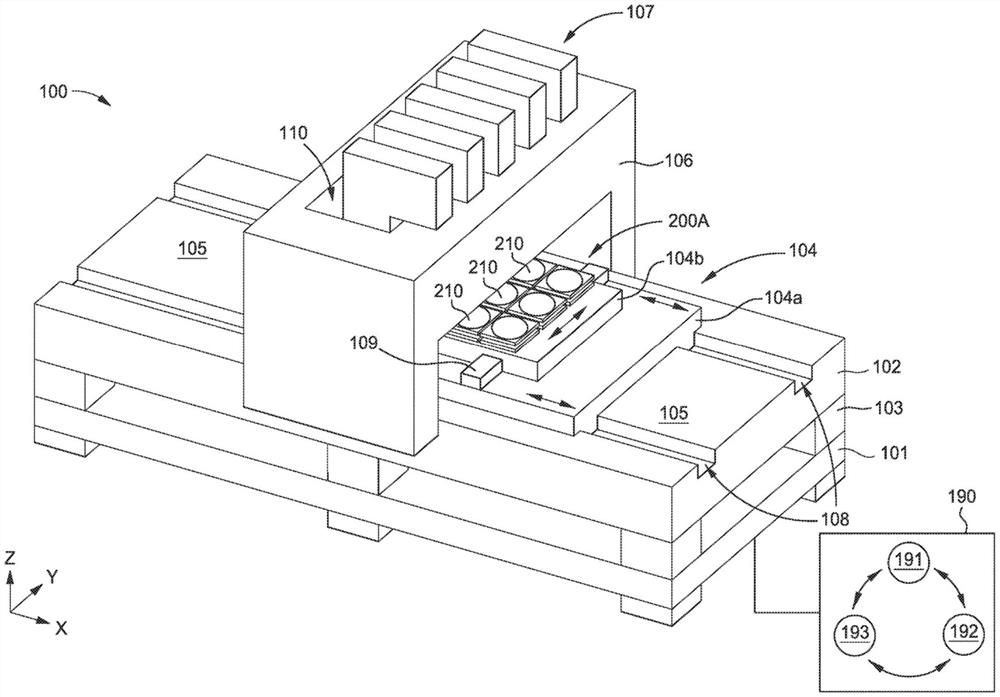
图1A是根据一个实施例的处理系统的等角视图,所述处理系统配置用来同时处理设置在多基板载体上的多个基板。
图1B根据一个实施例绘示基板与设置在其上方的光学模块的相对位置。
图2A是根据一个实施例的图1A所绘示的基板载体的等角视图。
图2B是根据一个实施例沿图2A的切线2B-2B的载体模块的剖面示意图,且图中还包括设置在载体模块的基板接收表面上的基板。
图2C是根据一个实施例的同时处理多个基板的方法的流程图。
图3A是根据一个实施例的与图2A所示的基板载体一起使用的面板转接板的等角视图。
图3B是沿着图3A的切线3B-3B的基板载体的等角剖面示意图,进一步包括设置在基板载体上的转接板和设置在转接板上的面板。
图3C是图3B的部分放大视图。
为了便于理解,在可能的情况下,使用相同的元件标号来表示附图中相同的元件。可以预期的是,一个实施例的元件和特征可以被有利地并入其他的实施例之中而无须赘述。
具体实施方式
本文所述的实施例一般是关于电子元件制造领域,特别是有关于在无掩模光刻系统,例如数字直写式光刻系统中同时处理多个基板的方法以及与其相关的装置。同时处理多个基板可以使基板处理吞吐量(每个处理系统单位时间所处理的基板)增加,可以有利地降低了基板的处理循环时间和基板的处理成本。本文所述的另一实施例提供一种配置用来处理大面积面板的基板载体,使处理系统在多基板处理配置和单一基板处理配置之间需要相对较小的转换时间(conversion time)。
图1A是根据一个实施例的处理系统的等角视图,此处所述处理系统100是配置用来同时处理设置在多基板载体上的多个基板的直写式光刻系统。图1B绘示位于光学模块107下方的基板210,其中,基板210的实际平面A偏离了用于光学模块曝光的所需平面B。
处理系统100具有支架101、基座102、运动台104以及基板载体200A。基座102设置在支架101上,并通过插入其间的多个隔振器(vibration isolators)103与支架101振动隔离。运动台104设置在平坦的基座表面105上方。基板载体200A设置在运动台104上方。处理系统100还包括连接到基座102的桥接器106,其中,桥接器106跨越基座表面105并且与基座表面105分离足够的高度,以容许运动台104以及其上设置有一个或多个基板210的基板载体200A可以从二者之间通过。在其他实施例中,桥接器106的支撑件设置在基座表面105上方,并且桥接器106跨越基座表面105的位于支撑件之间的部分。
在本实施例中,运动台104是X-Y线性平移运动台,其具有设置在基座表面105上并且可在X方向上相对于基座表面105移动的第一平台104a,以及设置在第一平台104a上并可在Y方向上相对于第一平台104a移动的第二平台104b。此处,X方向基本上垂直于桥接器106的跨越方向,且Y方向基本上是平行于桥接器106的跨越方向,因此基本上垂直于X方向。在一些实施例中,第一平台104a和第二平台104b中的一个或两个是一种空气轴承平台(airbearing stages)。运动台104还包括沿X方向延伸的一个或多个线性导引件,例如设置在基座表面105中的一个或多个平行通道108,或者连接到基座表面105或以其他方式设置在基座表面105上的平行轨道或轨线(未绘示)。第一线性马达(未绘示)沿着线性导引件在X方向上移动运动台104,第二线性马达(未绘示)沿着一个或多个第二导引件在Y方向上移动第二平台104b,第二导引件例如是连接到或设置在第一平台104a上或内的线性轨道109、轨线或通道。通常,第一平台104a和第二平台104b的横向位置(即X-Y位置)以及设置在第一平台104a和第二平台104b上方的基板载体200A的横向位置,是使用光学编码器(未绘示)和干涉仪(未绘示)系统来加以判定。
桥接器106承载多个光学模块107,光学模块107设置穿过桥接器106之中的开口110。多个光学模块107被定位成面向基座表面105,因此,当运动台104在桥接器106和基座表面105之间行进时,光学模块107会面对设置在基板载体200A上方的多个基板210。通常,设置在第二平台104b和基板载体200A之间的多个Z方向调节器(未绘示)可以用来促进基板载体200A相对于桥接器106和由桥接器106所承载的多个光学模块107的水平校准。
在一些实施例中,每一个光学模块107具有聚集传感器(focus sensor)、水平传感器(level sensor)、图像传感器以及光刻曝光光源其中之一者或多者。通常,聚集传感器用于判定基板的Z方向位置,即,当基板210位于光学模块107下方时,基板210的表面与光学模块107之间的垂直距离D(如图1B所绘示)。水平传感器可以用于通过测量基板平面A的倾角(tilt angle)θ和斜角(tip angle)α来判定基板平面A与预设X-Y平面B的偏差,其中,倾角θ是基板210相对于预设X-Y平面B绕Y轴的旋转位置偏差,斜角α是基板210相对于预设X-Y平面B绕X轴的旋转位置。
在一些实施例中,水平传感器包括光学传感器(未绘示),例如干涉仪。光学传感器用来沿着第一轴(例如X轴)和与第一轴垂直的第二轴(例如Y轴)映射(map)出相应基板的表面和/或层厚度轮廓。通常,光学传感器测量从光学传感器到设置于基板210上方的透明(部分反射)层(例如,光阻层)的表面的距离,以及测量从光学传感器到设置于基板210下方的层的反射或部分反射表面的距离。在每一次测量之后,运动台104以及设置在运动台104上方的多个基板210会在X方向和Y方向上移动,以沿着每一个对应的轴从多个测量位置获取测量值,进而形成X轴和Y轴表面轮廓信息。表面轮廓信息包括从光学传感器(及光学模块107)到基板210表面或基板层表面的距离。在一些其他的实施例中,轮廓检查系统(未绘示)用来在基板载体200A于多个光学模块107下方移动以进行基板处理之前,判定设置在基板载体200A上的每个基板210的表面轮廓。
垂直距离D、倾角θ和斜角α以及/或者轮廓信息(此处统称为位置信息)被传送到系统控制器190。系统控制器190在进一步处理之前,会使用位置信息来调整每一个基板210的Z方向位置(即,垂直距离D)和水平位置(θ,α)。图2A至图2C进一步绘示用于调整设置在基板载体200A上的多个基板210的每一者的Z方向位置和水平位置的装置和方法。
图像传感器,例如照相机,用于检测一个或多个形成在基板210的图案化表面之中或上方的基准特征(fiducial features)(未绘示),例如,对准标记。系统控制器190可以使用对准标记以判定图案偏移信息,例如X-Y水平偏移和旋转偏移之一者或二者,又例如,基板表面上形成的图案与预设的旋转位置相对比绕Z轴的旋转位置(即,旋转角度φ),其中,Z轴设置穿过基板的中心。
光刻曝光光源将电磁辐射(例如,一个或多个紫外光(UV)激光束)引导和/或聚焦到沉积于基板上的光阻层的表面上方或下方,以在光阻层中形成图案。
系统控制器190包括可编程中央处理器(CPU)191,其可与存储器192(例如,非易失性存储器)和支持电路193一起操作。支持电路193通常连接到CPU191,并且包括可以连接到处理系统100的各种元件的高速缓冲存储器、时钟电路、输入/输出子系统、电源等,以及上述的组合,以便于控制积层制造(additive manufacturing process)。CPU191是运用于工业设备中任何一种形式的通用计算器处理器之一,例如可编程逻辑控制器(PLC),用于控制处理系统100中的各种元件和子处理器。连接到CPU191的存储器192是非瞬时的,并且通常是,例如随机存取存储器(RAM)、只读存储器(ROM)、软盘驱动器、硬盘或任何其他形式、近端或远程的数字存储装置中的一个或多个。
通常,存储器192的形式是包含指令的计算机可读取储存介质(例如,非易失性存储器),当指令被CPU191执行时,便可进行处理系统100的操作。存储器192中的指令是“程序产品”的形式,例如用来实现本说明书所述方法的程序。程序代码可以符合许多不同程序语言中的任何一种。在一个实施例中,本公开内容可以通过储存于计算机可读取储存介质上、并与计算机系统一起使用的程序产品来实现。程序产品的程序可以定义实施例的功能(包括此处所描述的方法)。
例示的计算机可读取储存介质包括但不限于:(i)储存永久信息的不可写入储存介质(例如计算机内建的只读存储器元件,例如可被光盘(CD-ROM)驱动器读取的光盘、闪存、只读存储器芯片或任何类型的固态非易失性半导体存储器;(ii)储存可变信息的可写入储存介质(例如,软盘驱动器或硬盘驱动器中的磁盘或任何类型的固态随机存取半导体存储器)。当计算机可读取储存介质携带有引导本文所述方法的功能的计算机可读取指令时,这种计算机可读取储存介质即是本说明书所公开的实施例。
图2A是根据一个实施例的图1A所示的多基板载体,即基板载体200A的等角视图,基板载体200A包括多个载体模块200B。图2B是沿图2A的切线2B-2B的载体模块200B的剖面示意图,且图中还包括设置在载体模块200B的基板接收表面207上的基板210。通常,每一个载体模块200B被定位且固定地连接到运动台上,例如图1A中所描述的运动台104的第二平台104b上,以便于在直写式光刻工艺期间同时处理多个基板,例如,同时对多个基板进行图案化。
此处,基板载体200A包括多个载体模块200B,每一个载体模块200B具有底板201、设置在底板201上的多个Z方向致动器205以及设置在多个Z方向致动器205上的承载板202。此处,每一个承载板202彼此独立,因此由于多个Z方向致动器205的致动而传递至一个承载板202的运动不会将运动传递到相邻的承载板202。此处,每一个载体模块200B的具有单独且独立的底板201。在其他实施例中,多个承载模块200B共享共同的底板(未绘示)。多个升降销203可移动地穿设于承载板202中对应的多个第一升降销开口213内,用以促进基板210的搬运与转移,使基板210能够移出和移入承载板202的基板接收表面207。当升降销203延伸高过承载板202时,通过让基板201在承载板202上方进行定位,可以使机械手臂搬运器(robot handler)将基板210摆放到升降销203上,或者将基板210从升降销203上移除。
在此,多个升降销203设置在升降销板209上,升降销板209设置在延伸穿过底板201的轴杆215上,如图2B所绘示。升降致动器214连接到轴杆215上,用来升高或降低轴杆215,进而升高或降低多个升降销203。当轴杆215处于抬升位置(未绘示)时,升降销203延伸高过承载板202的基板接收表面207以将基板210抬起,使机械手臂搬运器(未绘示)能够拾起(access to)基板210。当轴杆215处于降低位置时,升降销203与基板接收表面207齐平或位于其下方,并且使基板210直接搁置在基板接收表面207上。在此,基板接收表面207从承载板202的正面表面208向下凹陷,并且向内设置于其中,使得当基板设置在基板接收表面207上时,正面表面208围绕基板210。基板210是使用真空源212(例如专用真空泵)固定在基板接收表面207。真空源212通过设置在承载板202中的一个或多个真空导管206与设置在基板接收表面207中的多个第一真空开口211流体连通。
图2C是根据一个实施例的同时处理多个基板的方法的流程图。在步骤231中,方法230包括将多个基板定位在基板处理系统的多基板载体上。在此,基板处理系统包括:基座、设置在基座上的运动台、设置在运动台上的基板载体、设置在基座表面上并与基座表面分离的桥接器、以及设置在桥接器上的多个光学模块。在一些实施例中,基板处理系统是图1A所述的处理系统,且/或多基板载体是图2A至图2B中所述的基板载体200A。在一些实施例中,基板是晶圆,例如在半导体元件制造工艺或半导体元件封装工艺中所使用的硅晶圆,其中,每一个晶圆可以具有直径为150毫米(mm)、200毫米、300毫米、450毫米或任何其他合适的尺寸的圆形表面。在其他实施例中,多个基板是矩形或圆形面板,例如玻璃或塑料面板,或是具有多个切割元件(singulated device)嵌入于其中以作为扇出型晶圆级封装(FOWLP)方案的一部分的重构基板(reconstituted substrates)。在一些实施例中,方法230包括在将每一个基板定位在基板支撑件上之前,将每一个基板预先对准至预设的方向。在一些实施例中,在连接于处理系统的预对准平台上进行每一个基板的预先对准,在此,每一个基板分别位于多基板载体的对应承载板上。
在步骤232和233中,方法230分别包括测量多个基板中每一个基板的倾角和斜角,并且根据测量到的倾角和斜角,使用设置在对应基板载体下方的一个或多个Z方向致动器,独立地对每一个基板进行水平校准。在一些实施例中,方法230还包括判定基板与位于基板上方的光学模块之间的垂直距离,并使用一个或多个Z方向致动器来调整承载板的高度,从而调整设置在承载板上方的基板的高度。此处,三个Z方向致动器205与承载板上的基板的中心点等距地间隔开,且每一个Z方向致动器205设置成与另外两个Z方向致动器205绕中心点呈120度角。因此,通过Z方向致动器205相对于Z方向的移动,可以使承载板所承载的基板上表面实现沿着倾角θ和斜角α的预设定向。在一些实施例中,聚焦传感器用来判定基板和光学模块之间的垂直距离。
在步骤234中,方法230包括判定多个基板中每一个基板的偏移信息。通常,偏移信息包括形成在基板表面之中或上方的第一图案的X-Y水平偏移和旋转偏移其中之一者或两者。在一些实施例中,方法230还包括将偏移信息与预设值(例如,控制限度)进行比较,如果偏移信息超过预设值,则重新对准基板。此处,重新对准基板包括,将基板返回到连接至处理系统的预对准平台,将基板旋转到预设的方向,以及将重新对准的基板放回到承载板的相同或不同基板接收表面上。
在步骤235中,方法230包括根据多个基板中每一个基板的偏移信息来产生图案化指令。在一些实施例中,图案化指令可以补偿多个基板中每一个基板的X-Y水平偏移和旋转偏移其中之一者或二者,进而能够同时图案化多个具有彼此不同X-Y水平偏移和旋转偏移的基板。
在步骤236中,方法包括图案化多个基板中的每一个基板,藉以在其上形成曝光图案。通常,图案化多个基板中的每一个基板以形成曝光图案的步骤,包括在多个光学模块下方移动运动台,所述光学模块将电磁辐射引导或聚焦到设置在基板上方的光阻层的表面上方或下方,藉以在其中形成曝光图案。在一些实施例中,电磁辐射是紫外光,光阻层是紫外光敏光阻层。在一些实施例中,图案化多个基板包括,同时将两个或更多个基板暴露于来自多个光学模块的电磁辐射,藉以在其上形成曝光图案。
图3A是根据一个实施例的与基板载体200A一起使用的转接板300的等角视图。图3B是沿着图3A的切线3B-3B的基板载体200A的等角剖面示意图,其进一步包括设置在基板载体200A上的转接板300和设置在转接板300上的面板310。图3C是图3B的部分放大视图。
在此,转接板300具有第一侧面301和与第一侧面301相对的第二侧面302。第一侧面301在面板处理期间承载单一面板310基板,并且包括形成第一侧面301的周边的第一框架表面308以及面板接收表面307,此处的面板接收表面307是矩形表面,从第一框架表面308向下凹陷,并向内设置于其中。第二侧面302装设于基板载体200A上,并且包括分别与基板载体200A的突出表面和凹陷表面对应的多个契合表面,并且还包括形成第二侧面302的周边的第二框架表面316。多个契合表面包括一个或多个凹陷表面315以及多个突出表面317,凹陷表面315具有与基板载体200A的正面表面208配合的尺寸和位置,突出表面317具有与基板载体200A的多个基板接收表面207配合的尺寸和位置。此处,一个或多个凹陷表面315从多个突出表面317和第二框架表面316两者向内凹入,使得当转接板300被定位在基板载体200A上方时,第二框架表面316围绕基板载体200A的周边。
当转接板300定位在基板载体200A上时,穿过转接板300形成的多个第二升降销开口313被定位成与穿过每一个承载板202形成的多个第一升降销开口213对齐。每一个载体模块200B的多个升降销203可移动地设置并穿过对应的第一升降销开口213,并进一步穿过对应的多个第二升降销开口313。当升降销203处于抬升位置时,它们将面板310从面板接收表面307抬升起来以使机械手臂搬运器(未绘示)能够拾取处理面板310,并且可被定位成从机械手臂搬运器接收另一个待处理的面板。当升降销203处于降低位置时,升降销203的上端与面板接收表面307齐平或位于其下方,并且面板310直接搁置在面板接收表面307上。通常,使用真空源212将面板310固定在面板接收表面307。真空源212与设置并穿过转接板300的多个第二真空开口311流体连通,其中,当转接板300被定位在基板载体200A上时,每一个第二真空开口311会对准(配准)对应的第一真空开口并与所述第一真空开口流体连通。
在一些实施例中,在转接板300被定位在多个Z方向致动器205上方之前或之后,这些Z方向致动器205放置在起始位置(未被致动位置)。在一些实施例中,在基板载体200A和第二平台104b(如图1A所绘示)之间设置的多个Z方向调整器(未绘示)用来调整基板载体200A水平位准(即,斜角和倾角)以及Z方向位置,从而调整转接板300和设置在转接板300上方的面板310的水平位准以及Z方向位置。
在其他实施例中,可以通过使用设置在承载板202下方的Z方向致动器205调整每一个承载板202的水平位准和Z方向位置,从而按预设地调整转接板300以及设置在转接板300上的面板310的水平位准(即,斜角和倾角)及Z方向位置。
本文所述的转接板300能够理想地将处理系统(例如图1A所述的处理系统100)从多基板处理配置转换为大面积面板处理配置,且具有相对最小的处理系统停机时间。
虽然本发明已以较佳实施例公开如上,在不脱离本发明的基本范围内,当得到其它和进一步的实施例,因此本发明的保护范围当由后附权利要求所界定。
- 数字光刻系统的多基板处理
- 光刻系统和在该光刻系统中处理基板的方法