一种平移双吸机械手
文献发布时间:2023-06-19 09:29:07
技术领域
本发明专利涉及机械加工设备技术领域,特别涉及一种平移双吸机械手。
背景技术
机械手是机械加工中常用的设备,现有技术下的吸盘式机械手往往会造成工件损坏,尤其是在进行易碎材料的加工过程时,吸盘已经与工件接触时,驱动机构仍然在驱动吸盘运动,造成对工件的压力过大或冲击过大,从而造成工件的损坏。现有技术下为了避免工件的损坏,往往采用更高精度的传感器对机械手进行定位,但是,更高精度的传感器也就意味着更高的价格,导致设备成本的提高,而且现有的机械手大部分都是单一吸附式的,机械手来回反复操作,用时较多,效率不高。
因此,发明一种平移双吸机械手来解决上述问题很有必要。
发明专利内容
本发明专利的目的在于提供一种平移双吸机械手,以解决上述背景技术中提出的问题。
为实现上述目的,本发明专利提供如下技术方案:一种平移双吸机械手,包括机体,所述机体顶部设置有控制器,所述控制器前侧面设置有显示屏,所述显示屏一侧设置有控制按钮,所述机体一侧设置有第一滑轨,所述第一滑轨一侧设置有升降装置,所述升降装置包括电机,所述电机传动轴一端设置有齿轮,所述升降装置一侧设置有第一滑槽,所述升降装置底部设置有第二滑槽,所述第二滑槽底部设置有滑条,所述滑条顶部设置有齿条,所述滑条底部一侧设置有第一电磁铁吸盘,所述滑条底部另一侧设置有第二电磁铁吸盘,所述滑条底部设置有工作台。
优选的,所述第一滑轨顶部设置有气缸,所述气缸底部设置有伸缩杆。
优选的,所述伸缩杆与升降装置一侧固定连接,所述第一滑轨与第一滑槽滑动连接。
优选的,所述滑条顶部设置有第二滑轨,所述第二滑轨与第二滑槽滑动连接。
优选的,所述齿轮与齿条啮合。
优选的,所述机体底部设置有滚轮。
本发明专利的技术效果和优点:本发明专利通过控制器设置好相关的参数,气缸工作带动升降装置上下移动,当升降装置下降时,第一电磁铁吸盘和第二电磁铁吸盘同时通电,第一电磁铁吸盘和第二电磁铁吸盘通电后具有磁性,利用磁性可把工件吸住,避免夹持式损坏工件,吸住工件后,升降装置上升,电机工作,通过齿轮和齿条的作用使滑条水平移动,将工件移动到工作台或放料处上方时,电机停止工作,气缸开始工作,升降装置下降后,第一电磁铁吸盘和第二电磁铁吸盘停止通电,第一电磁铁吸盘和第二电磁铁吸盘失去磁性,工件落在工作台或放料处,然后升降装置上升,电机反向转动,滑条回到原位置,如此反复运行,由于采用了两个电磁铁吸盘,当第一电磁铁吸盘吸住工作台上已加工工件时,第二电磁铁可以同时吸住工作台外的待加工工件,当第一电磁铁吸盘将已加工工件运送到放料处时,第二电磁铁吸盘刚好将待加工工件放到工作台上,然后第一电磁铁吸盘回来将加工好的工件运走,第二电磁铁吸盘继续将待加工工件运送到工作台上,如此操作大大节省了时间,提高了工作效率。
附图说明
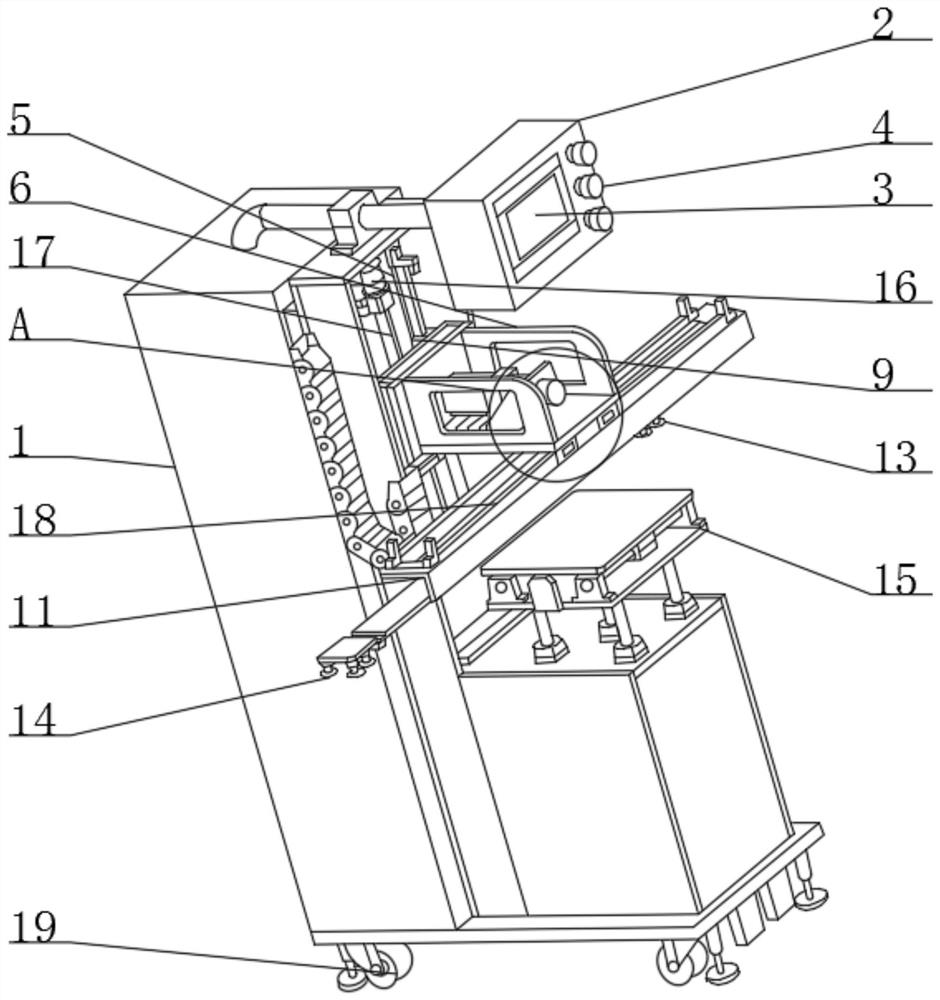
图1为本发明专利的结构示意图;
图2为本发明专利图1的A部放大图;
图3为本发明专利的图2俯视图;
图中:1机体、2控制器、3显示屏、4控制按钮、5第一滑轨、6升降装置、7电机、8齿轮、9第一滑槽、10第二滑槽、11滑条、12齿条、13第一电磁铁吸盘、14第二电磁铁吸盘、15工作台、16气缸、17伸缩杆、18第二滑轨、19滚轮。
具体实施方式
下面将结合本发明专利实施例中的附图,对本发明专利实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明专利一部分实施例,而不是全部的实施例。基于本发明专利中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明专利保护的范围。
本发明专利提供了如图1-3所示的一种平移双吸机械手,包括机体1,所述机体1顶部设置有控制器2,所述控制器2前侧面设置有显示屏3,所述显示屏3一侧设置有控制按钮4,所述机体1一侧设置有第一滑轨5,所述第一滑轨5一侧设置有升降装置6,所述升降装置6包括电机7,所述电机7传动轴一端设置有齿轮8,所述升降装置6一侧设置有第一滑槽9,所述升降装置6底部设置有第二滑槽10,所述第二滑槽10底部设置有滑条11,所述滑条11顶部设置有齿条12,所述滑条11底部一侧设置有第一电磁铁吸盘13,所述滑条11底部另一侧设置有第二电磁铁吸盘14,避免损坏工件,提高工作效率,节约时间,所述滑条11底部设置有工作台15。
所述第一滑轨5顶部设置有气缸16,所述气缸16底部设置有伸缩杆17,所述伸缩杆17与升降装置6一侧固定连接,所述第一滑轨5与第一滑槽9滑动连接,所述滑条11顶部设置有第二滑轨18,所述第二滑轨18与第二滑槽10滑动连接,所述齿轮8与齿条12啮合,所述机体1底部设置有滚轮19。
本实用工作原理:启动装置,电机7、气缸16、第一电磁铁吸盘13和第二电磁铁吸盘14均与控制器2电性连接,通过控制器2设置好相关的参数,气缸16工作带动升降装置6上下移动,当升降装置6下降时,第一电磁铁吸盘13和第二电磁铁吸盘14同时通电,第一电磁铁吸盘13和第二电磁铁吸盘14通电后具有磁性,利用磁性可把工件吸住,吸住工件后,升降装置6上升,电机7工作,通过齿轮8和齿条12的作用使滑条11水平移动,将工件移动到工作台15或放料处上方时,电机7停止工作,气缸16开始工作,升降装置6下降后,第一电磁铁吸盘13和第二电磁铁吸盘14停止通电,第一电磁铁吸盘13和第二电磁铁吸盘14失去磁性,工件落在工作台15或放料处,然后升降装置6上升,电机7反向转动,滑条11回到原位置,如此反复运行,由于采用了两个电磁铁吸盘,当第一电磁铁吸盘13吸住工作台上已加工工件时,第二电磁铁吸盘14可以同时吸住工作台15外的待加工工件,当第一电磁铁吸盘13将已加工工件运送到放料处时,第二电磁铁吸盘14刚好将待加工工件放到工作台15上,然后第一电磁铁吸盘13回来将加工好的工件运走,第二电磁铁吸盘14继续将待加工工件运送到工作台15上,如此操作大大节省了时间,提高了工作效率。
最后应说明的是:以上所述仅为本发明专利的优选实施例而已,并不用于限制本发明专利,尽管参照前述实施例对本发明专利进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明专利的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明专利的保护范围之内。
- 一种平移双吸机械手
- 一种双Z轴高度补偿式平移上下料机械手