一种提高汽车车身稳定安全性的装置及控制方法
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于车辆安全控制领域,尤其涉及到一种能提高汽车车身稳定安全性的装置及控制方法。
背景技术
目前,车辆电子稳定控制系统(ESP)是近些年刚刚发展起来的一种电子装置,是对制动防抱死和牵引力控制功能的继承与进一步扩展,即在防抱死制动系统(ABS)和牵引力控制系统(TCS)等技术的基础上,通过ECU系统控制各个车轮力和发动机的动力输出以保证车辆极限情况下的稳定性。然而,由于控制对象为车轮力和发动机的动力输出,因此在ESP系统工作时必然对车辆的动力性产生干扰,并且在车轮轮胎发生意外时(如爆胎或其他原因产生的气压剧烈变化)很容易削减ESP系统的作用甚至失效。为了减轻ESP系统工作时执行器的工作强度同时拓宽系统安全的极限条件,中国专利申请号为201810916515.4的文献中提出了一种喷气式车身稳定辅助系统,即根据车辆在行驶过程中的横摆角速度和质心侧偏角状态提供维持车身稳定所需的附加力矩,利用高压气体的反冲作用来辅助车身稳定系统的工作。
在实际汽车行驶情况中,由于驾驶环境以及道路环境会实时发生变化,所以汽车车身失去稳定的情况会经常发生,当汽车车身失去稳定时,车身俯仰角、侧倾角会发生变化,极大影响驾驶人以及乘客的情绪变化,可能会引起驾驶人不能做出最优的驾驶操作,从而引起交通事故的产生,降低了车辆行驶过程中的安全性。
发明内容
本发明为了解决上述问题,提出了一种提高汽车车身稳定安全性的装置及其控制方法,根据行驶过程中的车身俯仰角、车身侧倾角的实时变化,控制布置于底盘上的双向风机的旋转方向以及功率大小,将位于底盘的空气升力进行实时定量、定向转移,从而抑制由于汽车车身失去稳定而产生的俯仰、侧倾趋势,从而可以实时调整车身的稳定性,提高汽车行驶中车身稳定安全性,降低汽车在极限条件下的车辆事故率。
本发明所述的一种提高汽车车身稳定安全性的装置采用的技术方案是:其设置在汽车底盘下方,包括左右对称布置在前侧两个轮胎之间的两个前轴气罩、左右对称布置在后侧两个轮胎之间的两个后轴气罩,前轴气罩和后轴气罩的结构相同,每个前轴气罩和每个后轴气罩的底壁上均匀开有与外界大气相通的密布的孔洞,在前轴气罩和后轴气罩之间设有左右对称布置且结构相同的左侧双向风机和右侧双向风机,前轴气罩、后轴气罩、左侧双向风机和右侧双向风机均与底盘固定连接;左侧双向风机通过第一密封管路串接在右侧的前轴气罩和左侧的后轴气罩之间,右侧双向风机通过第二密封管路串接在在左侧的前轴气罩和右侧的后轴气罩之间,输出控制模块的输出端通过控制线连接分别左侧双向风机和右侧双向风机,参数采集模块、信号处理模块和输出控制模块依次连接。
本发明所述的一种提高汽车车身稳定安全性的装置的控制方法采用的技术方案是包括以下步骤:
步骤A:参数采集模块采集到车身俯仰角或车身侧倾角,并输入到信号处理模块;
步骤B:信号处理模块将俯仰角和车身侧倾角与设定的阈值作比较,当车身俯仰角或车身侧倾角的绝对值大于设定的阈值时,信号处理模块计算出左侧双向风机旋转时产生的主动升力F
步骤C:信号处理模块根据主动升力F
进一步地,步骤B中,信号处理模块首先建立车身俯仰和侧倾方程组,根据方程组建立空间状态方程,再计算出PD反馈控制的系数矩阵,最后计算主动升力F
进一步地,步骤C中,当主动升力F
本发明采用上述技术方案后,具有的有益效果是:
1、本发明工作时,布置在汽车底盘前后轴处左右对称的两个双向风机启动,通过与双向风机密封连接的密封管路及在前后轴处布置的密封气罩,能将应急车辆底盘处的空气进行对侧交叉转移,并且通过控制双向风机的旋转方向以及功率大小,可以实现将位于汽车底盘的空气进行定向、定量的转移,从而产生稳定车身的主动升力,可以减小汽车因失稳而引起的车身俯仰角、车身侧倾角的变化,从而抑制汽车失去稳定产生的俯仰、侧倾趋势,提高汽车车身稳定性,降低了在极限工况条件下的车辆事故率。
2、本发明工作时,信号处理模块根据输入的实时车身俯仰角、侧倾角,利用PD反馈控制(比例-微分反馈控制)实时决策出减小车身俯仰角、侧倾角的主动升力,并且信号处理模块根据计算出的主动升力进而控制布置在汽车底盘上的左右两个双向风机的旋转方向及功率大小,从而可以最大程度上抑制了汽车因车身失稳而产生的俯仰、侧倾趋势,提高汽车车身稳定性,降低了在极限条件下的车辆事故率。
3、本发明结构简单,且具有较好的普适性,可以适用在大多数车型上。
附图说明
图1为本发明所述的一种提高汽车车身稳定安全性的装置安装在汽车底盘上的结构布置图;
图2为图1所示装置的控制框图;
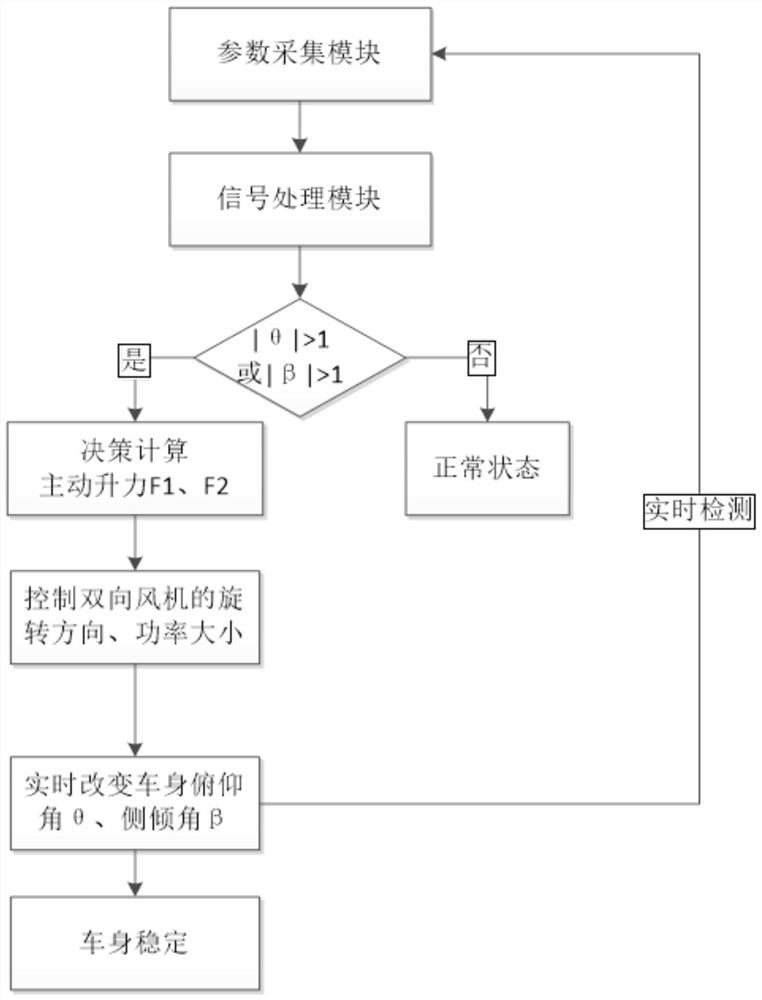
图3为图1所示装置的控制方法流程图;
图4为左、右双向风机正向旋转时汽车俯仰运动模型;
图5为左、右双向风机正向旋转时汽车侧倾运动模型;
图6为信号处理模块计算出主动升力的方法流程图;
图1中:1.底盘;2.左侧双向风机;3.轮胎;4.轮毂;5.后轴气罩;6.螺栓;7.前轴气罩;8.汽车前轴、9.安装板;10.螺栓;11.第一密封管路;12.第二密封管路;13.安装板;14.右侧双向风机;15.螺栓;17.汽车后轴。
具体实施方式
如图1所示,本发明所述的一种提高汽车车身稳定安全性的装置安装在汽车的底盘1的下方,包括两个前轴气罩7、两个后轴气罩5、两个双向风机2、14。两个前轴气罩7在底盘1的前下方,左右各一个,在横向上左右对称布置在前侧的两个轮胎3之间,每个前轴气罩7相对于汽车前轴8的轴心线在纵向上前后对称布置。两个后轴气罩5在底盘1的后下方,左右各一个,在横向上左右对称布置在后侧的两个轮胎3之间,每个后轴气罩5相对于汽车后轴17的轴心线在纵向上前后对称布置。这样,两个前轴气罩7的中心点的横向连线与汽车前轴8的轴心线平行且位于汽车前轴8的轴心线的正下方,两个后轴气罩5的中心点的横向连线与汽车后轴17轴心线平行且位于汽车后轴1的7轴心线的正下方,两个前轴气罩7和后轴气罩5沿着底盘1的纵向中心轴线分别左右对称布置。汽车前侧的轮胎3经轮毂4连接汽车前轴8,后侧的轮胎3经轮毂4连接汽车后轴17。
前轴气罩7和后轴气罩5的结构相同,其形状都是长方体。前轴气罩7和后轴气罩5的顶面都通过螺栓6与底盘1进行固定连接。
在前轴气罩7和后轴气罩5之间设置左侧、右侧双向风机2、14,左侧双向风机2和右侧双向风机14一左一右对称布置。左侧、右侧双向风机2、14的外壳通过螺丝固定连接在底盘1上。其中,左侧双向风机2通过第一密封管路11串接在右侧的前轴气罩7和左侧的后轴气罩5之间,左侧双向风机2的进出口通过第一密封管路11连接在右侧的前轴气罩7和左侧的后轴气罩5之间,左侧双向风机2通过其进出口串接在第一密封管路11上。右侧双向风机14通过第二密封管路12串接在在左侧的前轴气罩7和右侧的后轴气罩5之间,右侧双向风机14的进出口通过第二密封管路12连接在左侧的前轴气罩7和右侧的后轴气罩5之间,右侧双向风机14通过其进出口串接在第二密封管路12上。连接于前轴气罩7和左侧、右侧双向风机2、14之间的第一密封管路11和第二密封管路12在空间形成交叉状,该交叉处向底盘1方向弯曲。而连接于后轴气罩5和左侧、右侧双向风机2、14之间的第一密封管路11和第二密封管路12在空间相平行。
前轴气罩7和后轴气罩5与第一密封管路11和第二密封管路12连接时,都通过安装板9和螺栓10固定连接。第一密封管路11和第二密封管路12的前端通过安装板9和螺栓10连接于前轴气罩7的后侧壁的正中间处,第一密封管路11和第二密封管路12的后端通过安装板9和螺栓10连接于后轴气罩5的前侧壁的正中间处。
左侧双向风机2的进出口和第一密封管路11和之间通过安装板13和螺栓15固定连接,右侧双向风机14的进出口和第二密封管路12之间也通过相应的安装板13和螺栓15固定连接。
每个前轴气罩7和每个后轴气罩5的底壁上均匀开有密布的孔洞,使前轴气罩7和后轴气罩5内部与外界大气相通。
当左侧、右侧双向风机2、14正向旋转工作时,气流方向为从后往前的方向传递,当左侧、右侧双向风机2、14反向旋转工作时,气流方向为从前往后的方向传递。气流通过与双向风机2、14密封连接的第一、第二密封管路11、12以及在前后轴处布置的前轴气罩7和后轴气罩5,能将车辆底盘1处的空气进行对侧交叉转移,从而达到空气升力主动转移的目的。
如图2示,汽车自身安装有依次连接的参数采集模块、信号处理模块和输出控制模块,将输出控制模块的输出端通过控制线连接图1中的左侧双向风机2和右侧双向风机14。在实际汽车行驶的过程中,当汽车失去稳定时,车身俯仰角θ、车身侧倾角β会发生变化,参数采集模块便采集实时的车身俯仰角θ、车身侧倾角β,并将车身俯仰角θ、车身侧倾角β信号发送到信号处理模块,信号处理模块对车身俯仰角θ、车身侧倾角β进行判断,根据判断结果得出汽车的实时运行状态。信号处理模块为数字信号处理器DSP或车载电子控制单元ECU,将通过传感器获取的信号参数,通过电路连接关系与设置在印刷电路板上的DSP芯片进行电信号连接,输出控制模块,将处理过后的信号参数通过电信号或电压信号的形式传递给布置于汽车底盘1上的双向风机。
由于在实际汽车行驶的过程中,车身俯仰角θ、车身侧倾角β极限变化角度不会过大,所以在信号处理模块中车身俯仰角θ、车身侧倾角β的阈值设定为1°,信号处理模块将车身俯仰角θ、车身侧倾角β与阈值作比较,当实时的车身俯仰角θ或车身侧倾角β的绝对值大于信号处理模块设定的阈值1°时,信号处理模块开始决策计算减小车身俯仰角θ、车身侧倾角β的左侧双向风机2旋转时产生的主动升力F
如图3所示,当参数采集模块采集到车身俯仰角θ或车身侧倾角β的绝对值大于1°时,信号处理模块根据实时的车身俯仰角θ和车身侧倾角β,利用PD反馈调节(比例-微分反馈控制)决策计算减小车身俯仰角θ、车身侧倾角β的主动升力F
如图6所示,在本发明中,信号处理模块计算出俯仰主动升力F
首先建立车身俯仰、侧倾方程组:
由图4和图5所示,当左、右双向风机2、14均正向工作时,车身俯仰运动方程、侧倾运动方程如下所示:
其中,
z
I
I
θ为车身俯仰角,单位为rad;
β为车身侧倾角,单位为rad;
a
a
z
f
k
c
l
l
m
h
h
g为重力加速度,单位为m
B
b为主动升力作用点的横向距离,单位为m;
F
l
l
然后建立空间状态方程:
由方程组(1),建立空间状态方程,选取车身质心垂向位移Z
则状态空间方程可以写为:
其中:
U
则可以得到状态空间方程(3)向量矩阵A和B
A=[A
再计算PD反馈控制(比例-微分反馈控制)的系数矩阵KD:
利用向量矩阵A、B
在MATLAB环境中,LQG控制算法(线性二次高斯控制算法)的计算公式如下所示:
(KK,S,E)=LQR(A,B
式中:KK为反馈增益矩阵;
S为Riccati方程的解;
E为系统的特征值;
Q为状态变量的加权矩阵;
R为控制变量的加权矩阵;
N为零矩阵。
在MATLAB环境中,由公式(6)即可得到反馈增益矩阵KK,经过计算得到的矩阵KK、矩阵KD如下所示:
式中:KK
最后,计算出主动升力F
信号处理模块根据得到的实时车身俯仰角θ、车身侧倾角β,主动升力F
由于图4、图5是当布置于汽车底盘1上的左侧双向风机2和右侧双向风机14正向旋转时的受力分析,即当信号处理模块决策计算出的主动升力F
根据主动升力F
表1根据F
表2根据F
由表1、表2可得:信号处理模块能够根据计算出的主动升力F
需要说明的是:一般情况下,如图3示,只有当实时的车身俯仰角θ或车身侧倾角β的绝对值大于1°时,信号处理模块对输入的实时信号进行处理,并向输出控制模块发送分析处理信号,但当实时的车身俯仰角θ、车身侧倾角β都小于等于1°时,信号处理模块判断汽车处于正常状态,信号处理模块仍然对输入的实时信号进行处理,但不向输出控制模块发送分析处理信号,此时,输出控制模块不会启动布置于底盘1上的左、右双向风机2、14。
- 一种提高汽车车身稳定安全性的装置及控制方法
- 一种提高汽车车身稳定安全性的装置及控制方法