一种自动化天车、自动化控制系统及方法
文献发布时间:2023-06-19 09:30:39
技术领域
本发明实施例涉及自动控制技术领域,特别涉及一种自动化天车、自动化控制系统及方法。
背景技术
自动物料搬送系统(Automatic Material Handling System,AMHS)也被称为天车系统,自动物料搬送系统由多个运行于轨道上的自动化天车组成,这种搬送系统广泛应用于机场的货物运输、自动化工厂的物料运输等。自动物料搬送系统中为避免两个自动化天车相撞而损坏,在自动化天车上设置有缓冲器,用于在两个自动化天车相撞时,能够缓冲两个自动化天车之间的冲撞力,从而保护天车本体不受损坏。
然而,发明人发现现有技术中至少存在如下问题:若两个天车相撞时速度过快,不仅会导致缓冲器损坏,还有可能引起自动化天车本体的损坏,不仅维修时间较长、且维修成本较高。
发明内容
本发明实施方式的目的在于提供一种自动化天车、自动化控制系统及方法,能够避免天车相撞而造成损坏,避免由于自动化天车损坏而造成的维修时间和维修成本的浪费。
为解决上述技术问题,本发明的实施方式提供了一种自动化天车,包括:天车本体;安装于天车本体至少一端的磁体。
本发明的实施方式还提供了一种自动化控制系统,包括:滑轨,以及,设置于滑轨上的至少两个上述的自动化天车;相邻两自动化天车中,在自动化天车的运行方向上,前方自动化天车的后端设置有第二磁体,后方自动化天车的前端设置有第一磁体,第一磁体和第二磁体的磁性相同。
本发明的实施方式还提供了一种自动化控制方法,应用于上述的自动化天车,自动化控制方法包括:检测所受阻力的大小;若阻力大于第一预设值,则触发报警器报警。
本发明实施方式相对于现有技术而言提供了一种自动化天车,包括天车本体和安装于天车本体至少一端的磁体。在自动物料搬送系统中使用本实施方式的自动化天车,当自动化天车上的传感器损坏而两个自动化天车的距离过近时,两个自动化天车上的磁体的磁场会相互影响,从而产生排斥力,且两个自动化天车的距离越近,所产生的排斥力越大,从而避免了两个自动化天车相撞而损坏,也就避免了由于自动化天车损坏而造成的维修时间和维修成本的浪费。
另外,还包括:安装于天车本体的控制器、马达编码器以及警报器;马达编码器和警报器均连接控制器;马达编码器用于检测天车本体所受阻力的大小;控制器用于在阻力大于第一预设值时,触发警报器报警。该方案中控制器在阻力大于第一预设值时,触发警报器报警,从而提醒操作人员有两个自动化天车距离过近,从而避免两个自动化天车相撞。
另外,还包括:安装于天车本体一端的传感器,传感器连接控制器;传感器用于检测天车本体与另一自动化天车的距离;控制器还用于在距离小于第二预设值时,控制天车本体停止移动。该方案中若天车本体与另一自动化天车的距离小于第二预设值,则控制该自动化天车的天车本体停止移动,另一自动化天车继续移动,从而保持两个自动化天车之间的距离永远不小于第二预设值,维持各自动化天车之间的安全距离。
另外,磁体为永磁体或软磁体。
另外,天车本体包括:走行部、设置于走行部下方的本体部、连接走行部和本体部的连接部、以及分别设置于本体部前端和后端的突出部;至少一个突出部上安装有磁体。
另外,磁体为多个,多个磁体均匀安装在突出部上,且多个磁体的极性相同的一端均朝向同一方向。
另外,磁体呈条状。
另外,第二磁体与第一磁体的水平高度一致。
另外,还包括:无线连接自动化天车的遥控器,遥控器用于向自动化天车发送控制指令;自动化天车根据控制指令进行动作。
另外,第一预设值为22牛。
另外,还包括:检测自动化天车的天车本体与另一自动化天车的距离;若距离小于第二预设值,则控制天车本体停止移动。
另外,第二预设值为0.5米。
另外,还包括:接收来自遥控器的控制指令;根据控制指令进行动作。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
图1是根据本发明第一实施方式的自动化天车的主视图;
图2是根据本发明第一实施方式的自动化天车的左视图;
图3是根据本发明第一实施方式的自动化天车的磁体在突出部的结构示意图;
图4是根据本发明第二实施方式的自动化控制系统的结构示意图;
图5是根据本发明第三实施方式的自动化控制方法的流程示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本申请所要求保护的技术方案。
自动物料搬送系统中为避免两个天车相撞而损坏,在自动化天车的两端安装缓冲器,若两个自动化天车距离过近而相撞,缓冲器虽然可以在两个自动化天车相撞时起到缓冲作用,但若相撞时自动化天车速度过大,则容易造成天车本体的损坏。而自动化天车损坏则需要维修人员登高将损坏的自动化天车取出,操作难度较大,不仅浪费产线上的工作时间,维修时间也较长,且维修天车本体的成本较高。
针对于此,本发明的第一实施方式涉及一种自动化天车,如图1、图2和图3所示,自动化天车1包括:天车本体11、以及安装于天车本体11至少一端的磁体12。
具体地说,天车本体11的至少一端安装有磁体12,也即是说,天车本体11的一端仅安装有磁体12,或者天车本体11的两端均安装有磁体12。在自动物料搬送系统中使用本实施方式中的自动化天车1,当两个自动化天车1的距离过近时,两个自动化天车1上的磁体12的磁场会相互影响,从而产生排斥力,且两个自动化天车1的距离越近,所产生的排斥力越大,从而避免了两个自动化天车1相撞而损坏,也就避免了由于自动化天车1损坏而造成的维修时间和维修成本的浪费。
值得说明的是,本实施方式中的磁体12可以为永磁体(例如:强力磁铁),也可以为通电时带有磁性的软磁体(例如:通电线圈)。若为永磁体(例如:强力磁铁),虽然无需经常更换强力磁铁,可长时间使用,但在自动化天车1不使用时,磁体12上的磁场会对周围环境中的物体产生干扰;若为软磁体(例如:通电线圈),则在工作时再为通电线圈通电,从而避免在自动化天车1不工作时,通电线圈的磁性对周围环境中的物体产生干扰。
每个自动化天车1还包括:安装于天车本体11的控制器13、马达编码器14以及警报器15;马达编码器14和警报器15均连接控制器13;马达编码器14用于检测天车本体11所受阻力的大小;控制器13用于在阻力大于第一预设值时,触发警报器15报警。
具体地说,每个自动化天车1还包括:安装于天车本体11、并控制天车本体11运动的控制器13,用于检测天车本体11所受阻力大小的马达编码器14,马达编码器14连接控制器13,并将所受阻力的值发送给控制器13,由控制器13来判断所受阻力是否大于第一预设值,并在大于第一预设值时触发警报器15报警。在自动物料搬送系统中使用本实施方式中的自动化天车1,当两个自动化天车1的距离过近时,两个自动化天车1上的磁体12的磁场会相互影响,从而产生排斥力,使得在运动方向上前方自动化天车1受到沿运动方向的推力;后方自动化天车1受到与运动方向相反的阻力,后方自动化天车1的马达编码器14检测自身所受的阻力大小,并将所受阻力发送给控制器14,控制器14在阻力大于第一预设值时,触发警报器15报警,从而提醒操作人员有两个自动化天车1距离过近,操作人员利用遥控终端连接自动化天车1,调整自动化天车1的距离以解除警报,避免两个自动化天车1相撞。
本实施方式中第一预设值可由操作人员根据实际两个自动化天车1的距离到一定值时,自动化天车1所受阻力的大小自行设置。可选地,可以设定在两个自动化天车1的距离为0.2米时,进行报警。假设在两个自动化天车1的距离为0.2米时,自动化天车1所受的阻力大小为22牛,则可将第一预设值设定为22牛,当自动化天车1检测到所受的阻力大于22牛时,即触发报警器15报警。本领域技术人员可以理解,由于磁体12磁力的不同以及距离设定的不同,第一预设值可根据磁体12磁力以及设定距离的不同而发生变化,本实施方式中对第一预设值的大小不作具体限定。
进一步地,每个自动化天车1还包括:安装于天车本体11一端的传感器16,传感器16连接控制器13;传感器16用于检测天车本体11与另一自动化天车的距离;控制器13还用于在距离小于第二预设值时,控制天车本体11停止移动。
具体地说,本实施方式中在每个自动化天车1上至少一端安装有磁体12的同时,在天车本体11的一端安装有传感器16,传感器16检测天车本体11与另一自动化天车(即本实施方式中的前方自动化天车)的距离,并将检测到的距离发送至控制器14,控制器14判断该距离是否小于第二预设值,若距离小于第二预设值,则控制该自动化天车1的天车本体11停止移动,另一自动化天车1继续移动,从而保持两个自动化天车1之间的距离永远不小于第二预设值,维持各自动化天车1之间的安全距离。
本实施方式中第二预设值可由操作人员根据两个自动化天车1的安全距离进行设置,具体第二预设值可以设置为0.5米,从而在传感器16检测到距离小于第二预设值时,控制自动化天车1停止移动,从而保证两个自动化天车之间的安全距离不小于0.5米。
本实施方式中天车本体11包括:走行部111、设置于走行部111下方的本体部112、连接走行部111和本体部112的连接部113、以及分别设置于本体部112前端和后端的突出部114;至少一个突出部114上安装有磁体12。
具体地说,天车本体11包括:用于在滑轨上行走的走行部111、设置于走行部111下方的本体部112,连接走行部111和本体部112的连接部113,走行部111能够带动本体部112沿滑轨移动。走行部111包括:衬板1111、设置于衬板1111上方的变速箱1112、设置于变速箱1112两边的两个走行轮1113、设置于变速箱1112前端的导向轮1114、以及设置于衬板1111下方且用于抵持滑轨的两个防倾斜轮1115。本体部112还包括:位于本体部112中部的移载部1121,在走行部111带动本体部112移动到拾取位置处时,移载部1121向下运动拾取物料后收回,并在走行部111带动本体部112移动到下方位置处时,移载部1121向下运动下放物料。本体部112的前端和后端分别设置有突出部114,在至少一个突出部114上安装有磁体12。
进一步地,如图3所示,本实施方式中的磁体12为多个,多个磁体12均匀安装在突出部114上,且多个磁体12的极性相同的一端均朝向一个方向。通过将多个磁体12均匀分布在突出部114上,且多个磁体12的极性相同的一端均朝向一个方向,使得自动化天车1的突出部114处的磁场更加的均匀,当两自动化天车1距离过近时,自动化天车1受力也更加的均匀,避免了由于受力不均发生倾斜等危险情况。
本实施方式中的磁体12为条状,每个条状磁体12通过固定螺丝固定在突出部114上。
与现有技术相比,本发明实施方式提供了一种自动化天车1,包括:天车本体11、以及安装于天车本体11至少一端的磁体12。在自动物料搬送系统中使用本实施方式的自动化天车1,当两个自动化天车1的距离过近时,两个自动化天车1上的磁体12的磁场会相互影响,从而产生排斥力,且两个自动化天车1的距离越近,所产生的排斥力越大,从而避免了两个自动化天车1相撞而损坏,也就避免了由于自动化天车1损坏而造成的维修时间和维修成本的浪费。
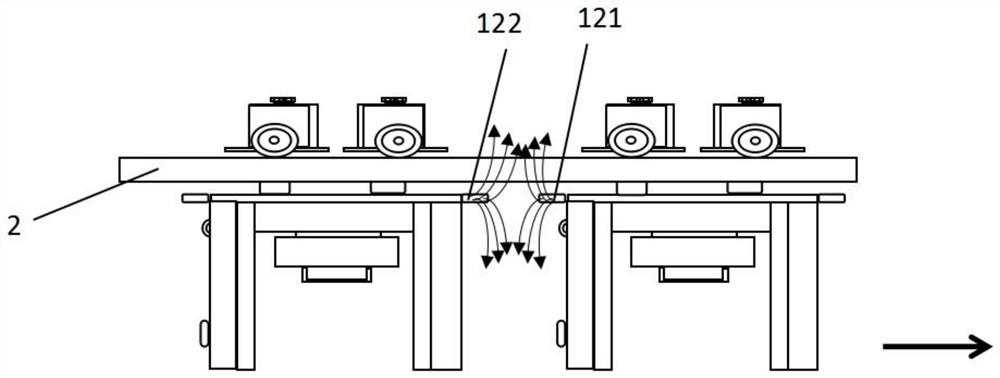
本发明的第二实施方式涉及一种自动化控制系统。本实施方式的自动化控制系统的结构示意图如图4所示,具体包括:滑轨2,以及,设置于滑轨2上的至少两个如第一实施方式中的自动化天车1。相邻两自动化天车1中,在自动化天车1的运行方向上,前方自动化天车1的后端设置有第一磁体121,后方自动化天车1的前端设置有第二磁体122,第一磁体121和第二磁体122的磁性相同。
具体地说,滑轨2上设置有至少两个自动化天车1,自动化天车1可在滑轨2上移动从而实现搬送物料等操作。如图4中箭头所示的自动化天车1的运行方向上,相邻两个自动化天车1中,前方的自动化天车1后端设置有第一磁体121,后方的自动化天车1的前端设置有第二磁体122,第一磁体121和第二磁体122的磁性相同,在两个自动化天车1距离过近时,第一磁体121和第二磁体122的磁场相互影响,由于第一磁体121和第二磁体122的磁性相同产生排斥力,且两个自动化天车1的距离越近,排斥力越大,从而使得两个自动化天车1不能继续靠近,避免了两个自动化天车1相撞而造成的损坏,且节约了维修时间和维修成本。
当两个自动化天车1距离过近而产生排斥力时,后方的自动化天车1会受到与天车本体11运动方向相反的阻力,当后方自动化天车1所受的阻力的大小大于第一预设值时,触发天车本体11上的警报器15报警,从而提醒操作人员有两个自动化天车1距离过近,需要操作人员利用遥控终端连接自动化天车1,调整自动化天车1的距离以解除警报,避免两个自动化天车1相撞。
可实现地,遥控终端可以为遥控器,自动化控制系统还包括:无线连接自动化天车1的遥控器(图4中未示出),遥控器用于向自动化天车1发送控制指令;自动化天车1根据控制指令进行动作。
具体地说,遥控器可以无线连接自动控制系统中的任意一个自动化天车1,操作员通过向自动化天车1发送控制指令,控制自动化天车1根据指令进行相应的动作。该控制指令可以为停车指令、移动指令、下放物料指令或拾取物料指令等,以控制自动化天车1执行停车、移动、下放物料或拾取物料等操作。
较佳的,第一磁体121与第二磁体122的水平高度一致。
具体地说,将相邻两个自动化天车1中,前方自动化天车1的第一磁体121和后方自动化天车1的第二磁体122的水平高度设置一致,不会由于两个天车上磁体的高度不同,使得第一磁体121和第二磁体122的磁场之间的影响变弱,而不能够在两个自动化天车1的距离过近时,产生足够大的排斥力以避免两个自动化天车1相撞而损坏。
与现有技术相比,本发明实施方式中提供了一种自动控制系统,在自动化天车1的运行方向上,相邻两个自动化天车1中,前方的自动化天车1后端设置有第一磁体121,后方的自动化天车1的前端设置有第二磁体122,第一磁体121和第二磁体122的磁性相同,在两个自动化天车1距离过近时,第一磁体121和第二磁体122的磁场相互影响,由于第一磁体121和第二磁体122的磁性相同产生排斥力,且两个自动化天车1的距离越近,排斥力越大,从而使得两个自动化天车1不能继续靠近,避免了两个自动化天车1相撞而造成的损坏,且节约了维修时间和维修成本。
本发明的第三实施方式涉及一种自动化控制方法,本实施方式中的自动化控制方法应用于如第一实施方式中的自动化天车。
本实施方式中的自动化控制方法的流程示意图如图5所示,具体包括:
步骤101:检测所受阻力的大小。
步骤102:判断阻力是否大于第一预设值。若是,则进入步骤103;若否,则该流程结束。
步骤103:触发报警器报警。
针对上述步骤101和步骤103,具体地说,当两个自动化天车的距离过近时,两个自动化天车上的磁体的磁场会相互影响,从而产生排斥力,使得在运动方向上前方自动化天车受到沿运动方向的推力;后方自动化天车受到与运动方向相反的阻力,后方自动化天车的马达编码器检测自身所受的阻力大小,并将所受阻力发送给控制器,控制器在阻力大于第一预设值时,触发警报器报警,从而提醒操作人员有两个自动化天车距离过近,操作人员利用遥控终端连接自动化天车,调整自动化天车的距离以解除警报,避免两个自动化天车相撞。
值得说明的是,本实施方式中第一预设值可由操作人员根据实际两个自动化天车的距离到一定值时,自动化天车所受阻力的大小自行设置。可选地,可以设定在两个自动化天车的距离为0.2米时,进行报警。假设在两个自动化天车的距离为0.2米时,自动化天车所受的阻力大小为22牛,则可将第一预设值设定为22牛,当自动化天车检测到所受的阻力大于22牛时,即触发报警器报警。本领域技术人员可以理解,由于磁体磁力的不同以及距离设定的不同,第一预设值可根据磁体磁力以及设定距离的不同而发生变化,本实施方式中对第一预设值的大小不作具体限定。
进一步地,还包括:检测自动化天车的天车本体与另一自动化天车的距离;若距离小于第二预设值,则控制天车本体停止移动。
具体地说,在天车本体的一端安装有传感器,传感器检测天车本体与另一自动化天车的距离,判断该距离是否小于第二预设值,若距离小于第二预设值,则控制该自动化天车的天车本体停止移动,另一自动化天车继续移动,从而保持两个自动化天车之间的距离永远不小于第二预设值,维持各自动化天车之间的安全距离。
值得说明的是,本实施方式中第二预设值可由操作人员根据两个自动化天车的安全距离进行设置,具体第二预设值可以设置为0.5米,从而在传感器16检测到距离小于第二预设值时,控制自动化天车停止移动,另一自动化天车继续移动,从而保证两个自动化天车之间的安全距离不小于0.5米。
进一步地,还包括:接收来自遥控器的控制指令;根据控制指令进行动作。
具体地说,遥控器可以无线连接自动化天车,自动化天车接收遥控器发送的控制指令,自动化天车根据指令进行相应的动作。该控制指令可以为停车指令、移动指令、下放物料指令或拾取物料指令等,以控制自动化天车执行停车、移动、下放物料或拾取物料等操作。
与现有技术相比,本发明实施方式提供了一种自动化控制方法,应用于第一实施方式的自动化天车,自动化控制方法包括:检测所受阻力的大小;在阻力大于第一预设值时,触发警报器报警,从而提醒操作人员有两个自动化天车距离过近,从而避免两个自动化天车相撞而损坏。
上面各种方法的步骤划分,只是为了描述清楚,实现时可以合并为一个步骤或者对某些步骤进行拆分,分解为多个步骤,只要包括相同的逻辑关系,都在本专利的保护范围内;对算法中或者流程中添加无关紧要的修改或者引入无关紧要的设计,但不改变其算法和流程的核心设计都在该专利的保护范围内。
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
- 一种自动化天车、自动化控制系统及方法
- 一种手工空心挂面自动化控制系统及生产方法