蠕动式管道内壁表面喷涂处理一体化设备
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及一种蠕动式管道内壁表面喷涂处理一体化设备。
背景技术
在管道内进行作业时,常常使用到管道机器人进行位移,但是现有的管道机器人的支撑机构与位移机构独立设置,通过不同的动力源进行驱动,导致结构复杂,运动协调性差,不利于管道机器人在管道内快速移动。
发明内容
本发明的目的在于克服以上所述的缺点,提供一种蠕动式管道内壁表面喷涂处理一体化设备。
为实现上述目的,本发明的具体方案如下:
一种蠕动式管道内壁表面喷涂处理一体化设备,包括喷涂部件和位移驱动机器人,所述喷涂部件传动连接在位移驱动机器人的输出端上,所述位移驱动机器人用于带动喷涂部件在管道内移动以及驱动喷涂部件旋转。
本发明进一步地,所述位移驱动机器人包括驱动电机、主动机构和从动机构;
所述主动机构包括第一壳体和主动曲轴,所述主动曲轴转动连接在第一壳体内,所述第一壳体的周壁上等间隔向外延伸有三个第一滑槽臂,所述三个第一滑槽臂均滑动连接有第一弹性支撑臂,三个所述第一弹性支撑臂的一端与主动曲轴之间分别通过第一连杆连接;
所述从动机构包括第二壳体和从动曲轴,所述从动曲轴转动连接在第二壳体内,所述从动曲轴与主动曲轴的相位差为180度,所述第二壳体的周壁上等间隔向外延伸有三个第二滑槽臂,所述三个第二滑槽臂均滑动连接有第二弹性支撑臂,三个所述第二弹性支撑臂的一端与从动曲轴之间分别通过第二连杆连接;
其中,所述驱动电机固定在第一壳体背向第二壳体的一侧、且其输出端与主动曲轴远离从动曲轴的轴颈连接,所述第一壳体与第二壳体之间相邻的一侧相互滑动套接,所述主动曲轴与从动曲轴之间相邻的一端相互传动套接、且两者之间可相对滑动,三个所述第一弹性支撑臂均与第二壳体之间铰接有柔性连杆,所述柔性连杆与第一弹性支撑臂铰接的一端可随第一弹性支撑臂的滑动而摆动,并在柔性状态与刚性状态之间变化。
本发明进一步地,所述第一弹性支撑臂、第二弹性支撑臂均包括滑动臂、浮动臂、过渡弹簧和U形的摆动接触块,所述浮动臂的一端滑动伸入滑动臂内,所述过渡弹簧设于滑动臂内、且其两端分别与浮动臂和滑动臂抵接,所述摆动接触块的底端的中部铰接在浮动臂的另一端,所述第一弹性支撑臂的滑动臂滑动连接在第一滑槽臂上,所述第一弹性支撑臂的滑动臂远离摆动接触块的一端通过第一连杆与主动曲轴连接,所述第二弹性支撑臂的滑动臂滑动连接在第二滑槽臂上,所述第二弹性支撑臂的滑动臂远离摆动接触块的一端通过第二连杆与从动曲轴连接。
本发明进一步地,所述摆动接触块的两端端部均为半圆形结构。
本发明进一步地,所述第一壳体靠近第二壳体的一侧轴向延伸有第一导向部,所述第二壳体靠近第一壳体的一侧轴向延伸有第二导向部,所述第一导向部滑动伸入第二导向部内并与第二导向部传动连接,所述主动曲轴靠近从动曲轴的轴颈延伸入第一导向部内,所述从动曲轴靠近主动曲轴的轴颈延伸入第二导向部内,所述从动曲轴靠近主动曲轴的轴颈伸入主动曲轴靠近从动曲轴的轴颈内并与主动曲轴传动连接。
本发明进一步地,所述柔性连杆包括第一段连杆和第二段连杆,所述第一段连杆的一端铰接在第一弹性支撑臂上,所述第二段连杆的一端铰接在第二壳体上,所述第一段连杆的另一端设有轴向盲孔以及与轴向盲孔连通的条形卡口,所述第二段连杆的另一端设有卡扣,所述第二段连杆的另一端活动伸入第一段连杆的轴向盲孔内,且所述卡扣活动卡接在所述条形卡口内,所述第一滑槽臂对应第一段连杆设有便于柔性连杆摆动的开孔,所述第一弹性支撑臂的滑动臂、第二弹性支撑臂的滑动臂的滑动行程均大于所述卡扣的滑移行程。
本发明的有益效果为:与现有技术相比,本发明通过设置主动曲轴与从动曲轴的相位差为180度,使得第一弹性支撑臂和第二弹性支撑臂交替与管道内壁支撑固定,同时利用柔性连杆与第一弹性支撑臂的联动,进而在同一驱动电机带动下实现径向支撑和轴向移动,结构简单,运动协调性好,实现机器人的快速移动。
本发明通过将位移驱动机器人与喷涂部件结合在一起,机械化操作,大大提高管道内壁喷涂处理的效率。
附图说明
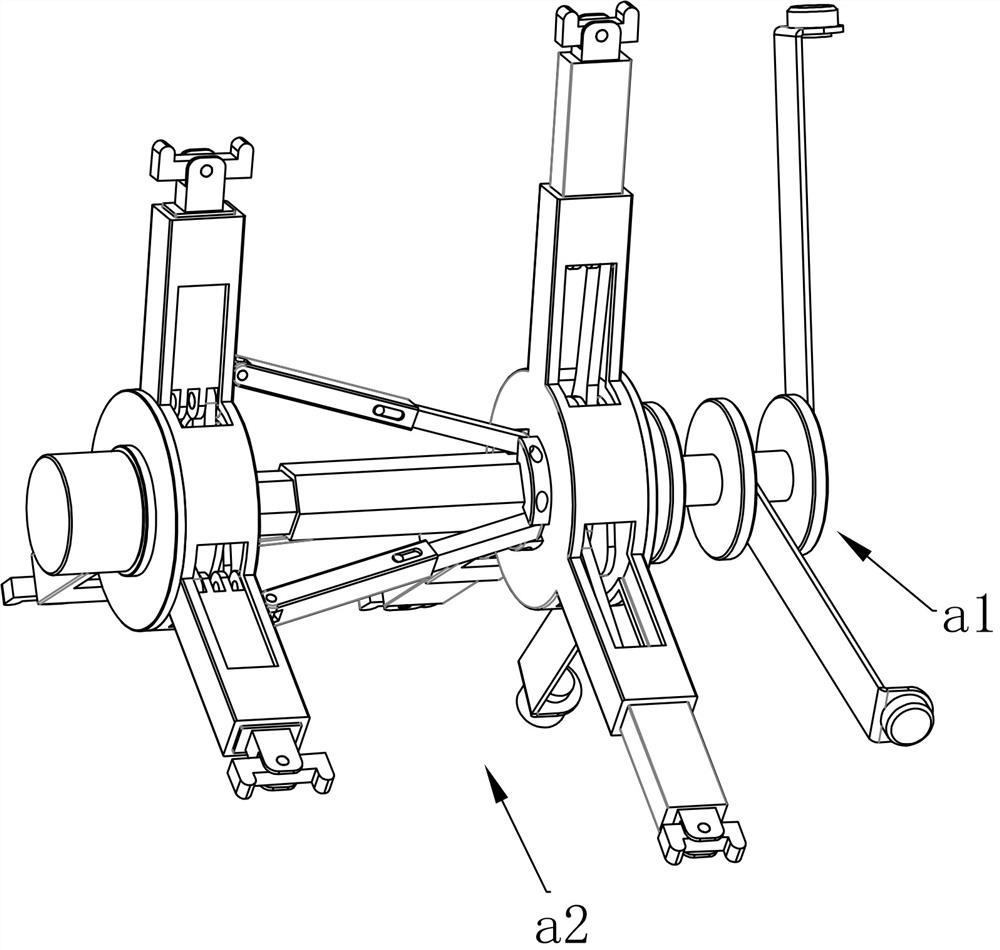
图1是本发明的立体图;
图2是本发明置于管道内的使用状态图;
图3是本发明的位移驱动机器人的立体图;
图4是本发明的位移驱动机器人另一视角的立体图;
图5是本发明的位移驱动机器人的剖视图;
图6是本发明的主动机构的分解示意图;
图7是本发明的从动机构的分解示意图;
图8本发明的第一弹性支撑臂或第二弹性支撑臂的剖视图;
附图标记说明:喷涂部件-a1;位移驱动机器人-a2;
驱动电机-1;主动机构-2;第一壳体-21;第一滑槽臂-211;第一导向部-212;主动曲轴-22;第一弹性支撑臂-23;第一连杆-24;从动机构-3;第二壳体-31;第二滑槽臂-311;第二导向部-312;从动曲轴-32;第二弹性支撑臂-33;第二连杆-34;柔性连杆-4;第一段连杆-41;条形卡口-411;第二段连杆-42;卡扣-421;滑动臂-10;浮动臂-20;过渡弹簧-30;摆动接触块-40。。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
如图1至图8所示,本实施例所述的一种蠕动式管道内壁表面喷涂处理一体化设备,包括喷涂部件a1和位移驱动机器人a2,所述喷涂部件a1传动连接在位移驱动机器人a2的输出端上,所述位移驱动机器人a2用于带动喷涂部件a1在管道内移动以及驱动喷涂部件a1旋转。
工作时,将整个一体化设备置入管道内,然后位移驱动机器人a2带动喷涂部件a1在管道内快速移动,同时驱动喷涂部件a1旋转,喷涂部件a1工作,对管道内壁表面进行喷涂处理,机械化操作,大大提高管道内壁喷涂处理的效率。
基于上述实施例的基础上,进一步地,所述位移驱动机器人a2包括驱动电机1、主动机构2和从动机构3;
所述主动机构2包括第一壳体21和主动曲轴22,所述主动曲轴22转动连接在第一壳体21内,所述第一壳体21的周壁上等间隔向外延伸有三个第一滑槽臂211,所述三个第一滑槽臂211均滑动连接有第一弹性支撑臂23,三个所述第一弹性支撑臂23的一端与主动曲轴22之间分别通过第一连杆24连接;
所述从动机构3包括第二壳体31和从动曲轴32,所述从动曲轴32转动连接在第二壳体31内,所述从动曲轴32与主动曲轴22的相位差为180度,所述第二壳体31的周壁上等间隔向外延伸有三个第二滑槽臂311,所述三个第二滑槽臂311均滑动连接有第二弹性支撑臂33,三个所述第二弹性支撑臂33的一端与从动曲轴32之间分别通过第二连杆34连接;
其中,所述驱动电机1固定在第一壳体21背向第二壳体31的一侧、且其输出端与主动曲轴22远离从动曲轴32的轴颈连接,所述第一壳体21与第二壳体31之间相邻的一侧相互滑动套接,所述主动曲轴22与从动曲轴32之间相邻的一端相互传动套接、且两者之间可相对滑动,所述喷涂部件a1传动连接在从动曲轴32远离主动曲轴22的轴颈上,三个所述第一弹性支撑臂23均与第二壳体31之间铰接有柔性连杆4,所述柔性连杆4与第一弹性支撑臂23铰接的一端可随第一弹性支撑臂23的滑动而摆动,并在柔性状态与刚性状态之间变化。
工作时,将喷涂部件a1传动连接在从动曲轴32远离主动曲轴22的轴颈上,然后驱动电机1带动主动曲轴22旋转,主动曲轴22通过三个第一连杆24同步驱动三个第一弹性支撑臂23运动,三个第一弹性支撑臂23各自对应沿着第一滑槽臂211做往复运动,同时主动曲轴22将旋转力矩传递至从动曲轴32上,驱动从动曲轴32旋转,从动曲轴32带动通过三个第二连杆34同步驱动三个第二弹性支撑臂33运动,三个第二弹性支撑臂33各自对应沿着第二滑槽臂311做往复运动,由于主动曲轴22与从动曲轴32的相位差为180度,使得三个第一弹性支撑臂23与三个第二弹性支撑臂33的运动相反,即当第一弹性支撑臂23沿着第一滑槽臂211向外滑动伸出时,第二弹性支撑臂33沿着第二滑槽臂311向内滑动收缩,从而使主动机构2和从动机构3交替与管道内壁支撑固定;同时柔性连杆4跟随第一弹性支撑臂23的滑动而同步摆动,进而在柔性状态与刚性状态之间变化,当柔性连杆4处于柔性状态时,主动机构2与从动机构3之间不产生轴向作用力,当柔性连杆4处于刚性状态时,主动机构2与从动机构3之间产生轴向作用力,在第一弹性支撑臂23与管道内壁支撑固定时,主动机构2通过柔性连杆4拉动从动机构3沿着管道轴向移动,进而带动喷涂部件a1沿管道移动,而在第二弹性支撑臂33与管道内壁支撑固定时,主动机构2通过柔性连杆4受到从动机构3的反作用力而朝向管道内轴向蠕动,即主动机构2远离从动机构3移动,如此重复循环,不断带动喷涂部件a1在管道内进行蠕动式移动。
本实施例通过设置主动曲轴22与从动曲轴32的相位差为180度,使得第一弹性支撑臂23和第二弹性支撑臂33交替与管道内壁支撑固定,同时利用柔性连杆4与第一弹性支撑臂23的联动,进而在同一驱动电机1带动下实现径向支撑和轴向移动,结构简单,运动协调性好,实现机器人的快速移动。
本发明进一步地,所述第一弹性支撑臂23、第二弹性支撑臂33均包括滑动臂10、浮动臂20、过渡弹簧30和U形的摆动接触块40,所述浮动臂20的一端滑动伸入滑动臂10内,所述过渡弹簧30设于滑动臂10内、且其两端分别与浮动臂20和滑动臂10抵接,所述摆动接触块40的底端的中部铰接在浮动臂20的另一端,所述第一弹性支撑臂23的滑动臂10滑动连接在第一滑槽臂211上,所述第一弹性支撑臂23的滑动臂10远离摆动接触块40的一端通过第一连杆24与主动曲轴22连接,所述第二弹性支撑臂33的滑动臂10滑动连接在第二滑槽臂311上,所述第二弹性支撑臂33的滑动臂10远离摆动接触块40的一端通过第二连杆34与从动曲轴32连接。
实际使用时,当第一弹性支撑臂23支撑固定住管道内壁时,第一弹性支撑臂23的摆动接触块40与管道内壁接触并压缩过渡弹簧30,随着驱动电机1的工作,主动曲轴22通过第一连杆24带动三个第一弹性支撑臂23逐渐收回,此时第一连杆24拉动第一弹性支撑臂23的滑动臂10收回,由于过渡弹簧30的弹力作用使得摆动接触块40保持与管道内壁接触,同时第一弹性支撑臂23的滑动臂10带动柔性连杆4向内摆动,此时由于柔性连杆4的柔性作用,使得第一弹性支撑臂23对从动机构3并未产生作用力,而第二弹性支撑臂33在从动曲轴32的驱动下同步逐渐向外伸出,即从动曲轴32通过第二连杆34推动第二弹性支撑臂33的滑动臂10向外伸出,第二弹性支撑臂33的滑动臂10带动第二弹性支撑臂33的摆动接触块40向外伸出,直至第二弹性支撑臂33的摆动接触块40支撑固定住在管道内壁上,并且在柔性连杆4从柔性状态变为刚性状态、以及第一弹性支撑臂23的过渡弹簧30恢复完弹性形变时,随着第一弹性支撑臂23的滑动臂10带动第一弹性支撑臂23的摆动接触块40收回,同时整个主动机构2通过柔性连杆4与从动机构3之间产生相互推力,而由于从动机构3径向支撑固定,使得主动机构2受到从动机构3的反推力而相对从动机构3蠕动;
主动机构2蠕动完成后,从动曲轴32驱动第二支撑臂向内收回,同步地,主动曲轴22驱动第一弹性支撑臂23向外伸出,柔性连杆4同步跟随第一弹性支撑臂23的滑动臂10向外摆动,并从刚性状态转变为柔性状态,直至第一弹性支撑臂23的摆动接触块40在过渡弹簧30的弹力作用下与管道内壁接触并支撑固定住,随着第一弹性支撑臂23的滑动臂10继续向外伸出,使得过渡弹簧30进一步被压缩,同时柔性连杆4再次由柔性状态变为刚性状态,并且从动曲轴32带动第二弹性支撑臂33向内收回,此时由于柔性连杆4为刚性状态,进而第一弹性支撑臂23的滑动臂10在继续向外伸出时通过柔性连杆4拉动整个从动机构3朝向主动机构2蠕动;
如此重复上述过程,整个机器人带动喷涂部件a1在管道内进行蠕动,同时主动机构2的第一弹性支撑臂23与从动机构3的第二弹性支撑臂33交替支撑固定在管道内壁上,保证整个机器人的径向支撑,从而实现机器人径向支撑与轴向蠕动协调式进行,实现机器人在管道内快速移动。
本实施例通过在第一弹性支撑臂23的浮动臂20和第二弹性支撑臂33的浮动臂20分别铰接摆动接触块40,当遇到内壁有突起障碍物时,通过摆动接触块40受力摆动而越过障碍物,若障碍物尺寸超过摆动接触块40的摆程后,摆动接触块40受力后通过浮动臂20挤压过渡弹簧30,使得过渡弹簧30压缩,进而使摆动接触块40越过障碍物,从而大大提高整个机器人蠕动过程中的越障能力,不易发生卡滞,工作更可靠,同时相比于采用滚轮的方式,摆动接触块40的支撑力更强。
本发明进一步地,所述摆动接触块40的两端端部均为半圆形结构。如此设置,即保证摆动接触块40的支撑力,也更利于摆动接触块40越过障碍物。
本发明进一步地,所述柔性连杆4包括第一段连杆41和第二段连杆42,所述第一段连杆41的一端铰接在第一弹性支撑臂23上,所述第二段连杆42的一端铰接在第二壳体31上,所述第一段连杆41的另一端设有轴向盲孔以及与轴向盲孔连通的条形卡口411,所述第二段连杆42的另一端设有卡扣421,所述第二段连杆42的另一端活动伸入第一段连杆41的轴向盲孔内,且所述卡扣421活动卡接在所述条形卡口411内,所述第一滑槽臂211对应第一段连杆41设有便于柔性连杆4摆动的开孔,所述第一弹性支撑臂23的滑动臂10、第二弹性支撑臂33的滑动臂10的滑动行程均大于所述卡扣421的滑移行程。
实际使用时,当第一弹性支撑臂23由收缩状态向外伸出时,第一弹性支撑臂23的滑动臂10带动第一段连杆41向外摆动,由于第一段连杆41与第二段连杆42之间滑动卡接,此时第一段连杆41相对第二段连杆42产生相对滑动,卡扣421相对条形卡口411滑移,即柔性连杆4处于柔性状态,第一弹性支撑臂23与从动机构3的第二壳体31之间不产生轴向作用力,随着第一弹性支撑臂23的滑动臂10继续伸出,使得第一弹性支撑臂23的摆动接触块40在过渡弹簧30的弹力作用下支撑固定在管道内壁上,在此过程中,卡扣421相对条形卡口411的滑移行程完成,此时柔性连杆4处于刚性状态,同时第二弹性支撑臂33的滑动臂10带动第二弹性支撑臂33的摆动接触块40脱离与管道内壁接触,然后在第一弹性支撑臂23继续伸出的同时,第一弹性支撑臂23的滑动臂10通过柔性连杆4拉动整个从动机构3相对主动机构2蠕动,从动机构3带动喷涂部件a1移动;随着主动曲轴22的转动,第一弹性支撑臂23由伸出状态逐渐收回,此时第一弹性支撑臂23的滑动臂10带动第一段连杆41相对第二连杆34滑动,卡扣421再次相对条形卡口411滑移,即此时柔性连杆4处于柔性状态,而第二弹性支撑臂33则同步逐渐伸出,当第二弹性支撑臂33的摆动接触块40支撑固定在管道内壁上时,第一弹性支撑臂23的摆动接触块40脱离与管道的接触,在这过程中,卡扣421相对条形卡口411的滑移行程完成,柔性连杆4从柔性状态变为刚性状态,随着第一弹性支撑臂23的滑动臂10继续收回,并施加推力在柔性连杆4上,由于从动机构3支撑固定在管道上,从动机构3通过柔性连杆4产生反推力作用在主动机构2上,进而推动主动机构2远离从动机构3蠕动;如此重复,不断带动喷涂部件a1在管道内快速移动。
本发明进一步地,所述第一壳体21靠近第二壳体31的一侧轴向延伸有第一导向部212,所述第二壳体31靠近第一壳体21的一侧轴向延伸有第二导向部312,所述第一导向部212滑动伸入第二导向部312内并与第二导向部312传动连接,所述主动曲轴22靠近从动曲轴32的轴颈延伸入第一导向部212内,所述从动曲轴32靠近主动曲轴22的轴颈延伸入第二导向部312内,所述从动曲轴32靠近主动曲轴22的轴颈伸入主动曲轴22靠近从动曲轴32的轴颈内并与主动曲轴22传动连接。如此设置,即实现主动机构2与从动机构3之间的相对滑动,又保证主动机构2的旋转力矩传递至从动机构3上。
本发明进一步地,所述第一导向部212、第二导向部312均呈六棱柱结构,所述主动曲轴22的轴颈设有呈六棱柱结构的轴孔,所述从动曲轴32的轴颈呈六棱柱结构。如此设置,结构简单,加工成本低。
以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。
- 蠕动式管道内壁表面喷涂处理一体化设备
- 一种耐低温分散式生活污水处理一体化设备及其处理方法