一种基于RE的齿轮失效部位特征重构方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及一种基于RE(Reverse Engineering:逆向工程)的齿轮失效部位特征重构方法,属于逆向工程技术领域和齿轮再制造领域。
背景技术
目前通过激光熔覆再制造技术对失效齿轮进行再制造修复成为失效齿轮修复的主要方式,齿轮激光再制造的工艺选择及修复路径规划需要依据缺损部位的重构模型来确定,由于齿轮表面形状复杂,失效部位模型重构精度难以保证。而且,现有技术中,存在齿轮失效部位特征重构效率低,精度难以满足后续再制造的问题。
发明内容
为此本发明基于RE的齿轮失效部位特征重构方法,对于提高齿轮失效部位的模型重构精度有着非常重要的意义。针对现有技术中的上述问题,本发明旨在提供一种基于RE的齿轮失效部位特征重构方法,以解决针对齿轮失效部位特征重构效率低,精度难以满足后续再制造的问题。
一种基于RE的齿轮失效部位特征重构方法,其步骤如下:
S1、对失效齿轮进行线切割处理,去除其残余应力层以及对失效齿轮着色处理;
S2、通过扫描失效齿轮表面特征获取点云数据;
S3、对失效齿轮表面点云数据进行去除异常点、降噪、封装、简化并填充孔洞;
S4、基于逆向工程原理对失效齿轮进行重建;
S5、依据缺损部位的邻齿对重构模型的精度进行分析。
优选的,对失效齿轮进行线切割处理,去除其残余应力层后,然后用砂纸进行打磨,去除表面的锈蚀及毛刺,最后为有利于点云扫描,在失效齿轮表面喷涂白色显影剂及粘贴标记点。
优选的,使用GOM光学扫描仪对失效齿轮进行扫描,每次扫描时要保证扫描面上最少存在3个标记点,且每次新扫描时所扫描到的标记点需存在已经扫描过的标记点,从而获取整个失效齿轮的表面特征。
优选的,去除异常点为手动选择离齿轮主体较远面积较大的点云并去除,对于距离齿轮较近的异常点为防止有效的点云数据被删除,选择软件中的体外孤点选项进行删除。
优选的,降噪为使用统计分析的方法来去除噪声点,对待修复齿轮点云数据中的采样点与其相邻点的距离进行统计分析,设定阈值来剔除距离超过阈值的噪声点,包括如下步骤:
步骤1、建立点云间的拓扑关系,对待修复齿轮点云中的任一点Pi的邻域点,记为Pij={Pi1,Pi2...Pik};
步骤2、计算采样点Pi到其邻域点的距离并取平均值,计算公式
优选的,对点云数据进行封装处理,对封装操作后模型使用Geomagic studio软件进行简化处理,基于曲率的方式对齿轮孔洞进行填充。
优选的,Geomagic Design X中的领域组分割功能,通过对整个失效齿轮模型进行领域分割、曲面拟合拼接后获取失效齿轮的重构模型,运用实体求差法,实现失效部位的3D特征重构。
优选的,Geomagic Qualify逆向工程检测软件对齿轮的失效部位重构模型进行整体误差分析及标准偏差分析,确保重构模型精度能够满足齿轮再制造需要。
与现有技术相比,本发明具有的有益效果是:本发明设计了一种基于RE的齿轮失效部位特征重构方法,以解决齿轮失效部位重构模型精度低的问题,为提高齿轮再制造修复质量打下基础。
附图说明
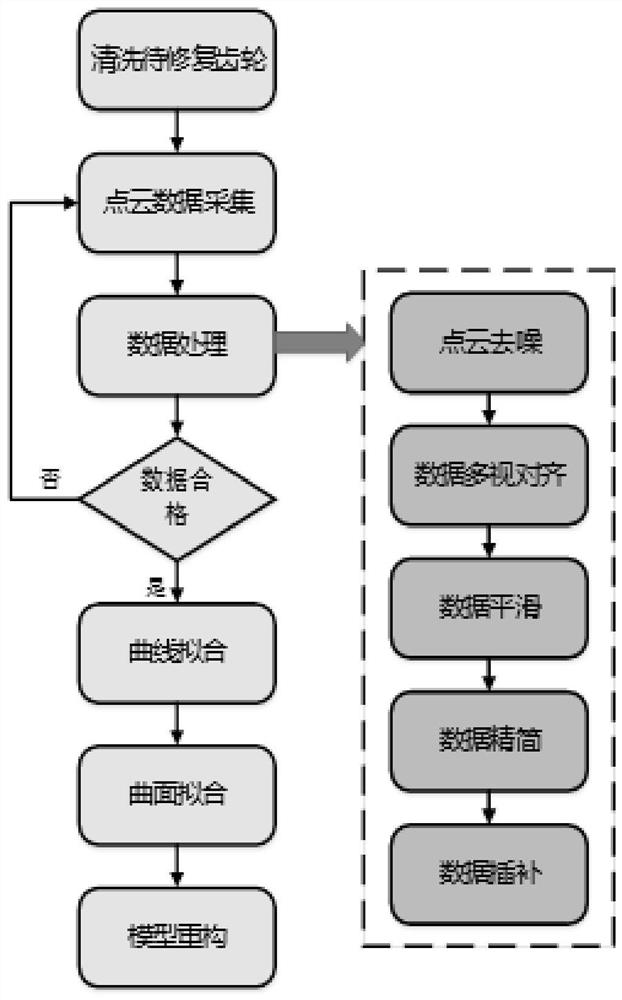
图1为本发明的缺损部位模型重构流程图。
图2为本发明的失效齿轮前处理图。
图3为本发明的失效齿轮初始点云图。
图4为本发明的点云降噪偏差图。
图5为本发明的封装并简化图。
图6为本发明的填充前孔洞图。
图7为本发明的填充后齿轮模型图。
图8为本发明的失效齿轮领域分割图。
图9为本发明的曲面拟合及偏差图。
图10为本发明的齿轮失效部位重构模型图。
图11为本发明的重构模型3D偏差图。
图12为本发明的整体误差分布图。
图13为本发明的标准偏差柱状图。
具体实施方式
下面结合附图及实施例,对本发明进行进一步详细说明,但应当理解实施例用以解释本发明,并不用于限制本发明。
齿轮失效部位的特征重构是失效齿轮再制造修复的基础,为解决齿轮失效部位特征重构存在的精度低问题,特提出了一种基于RE的齿轮失效部位特征重构方法,实际以某机床齿轮失效部位特征重构为背景,验证该方法的模型重构精度。图1为本发明的缺损部位模型重构流程图。如图1所示,首先清洗待修复齿轮;然后进行点云数据采集和数据处理;其中数据处理包括点云去噪、数据多视对齐、数据平滑、数据精简和数据插补。如数据不合格,则进行点云数据采集;如数据合格,则进行曲线拟合、曲面拟合和模型重构。本发明方法步骤如下:S1、对失效齿轮进行线切割处理,去除其残余应力层以及对失效齿轮着色处理;S2、通过扫描失效齿轮表面特征获取点云数据;S3、对失效齿轮表面点云数据进行去除异常点、降噪、封装、简化并填充孔洞;S4、基于逆向工程原理对失效齿轮进行重建;S5、依据缺损部位的邻齿对重构模型的精度进行分析。
对失效齿轮进行线切割处理,去除其残余应力层以及对失效齿轮着色处理。失效齿轮前处理如图2所示,对失效齿轮进行线切割处理,去除其残余应力层后,然后用砂纸进行打磨,去除表面的锈蚀及毛刺,最后为有利于点云扫描,在失效齿轮表面喷涂白色显影剂及粘贴标记点。
使用GOM光学扫描仪对失效齿轮进行扫描,每次扫描时要保证扫描面上最少存在3个标记点,且每次新扫描时所扫描到的标记点需存在已经扫描过的标记点,从而获取整个失效齿轮的表面特征。如图3所示,使用GOM光学扫描仪对经过前处理的失效齿轮进行表面特征的采集,每次扫描时要保证扫描面上最少存在3个标记点,且每次新扫描时所扫描到的标记点需存在已经扫描过的标记点,有利于后期的点云数据拼接得到完整的待修复齿轮表面信息。
去除异常点为手动选择离齿轮主体较远面积较大的点云并去除,对于距离齿轮较近的异常点为防止有效的点云数据被删除,选择软件中的体外孤点选项进行删除。也就是说,对离齿轮主体一定距离L的超过一定面积M的点云进行手动选择并去除,其中一定距离L和一定面积M可根据技术要求进行确定;对于小于一定距离L的距离齿轮较近的异常点为防止有效的点云数据被删除,选择软件中的体外孤点选项进行删除。降噪为使用统计分析的方法来去除噪声点,对待修复齿轮点云数据中的采样点与其相邻点的距离进行统计分析,设定阈值来剔除距离超过阈值的噪声点,包括如下步骤:步骤1、建立点云间的拓扑关系,对待修复齿轮点云中的任一点Pi的邻域点,记为Pij={Pi1,Pi2...Pik};步骤2、计算采样点Pi到其邻域点的距离并取平均值,计算公式
对点云数据进行封装处理,对封装操作后模型使用Geomagic studio软件进行简化处理,基于曲率的方式对齿轮孔洞进行填充。如图5所示,封装的实质是将扫描得到的点云数据在空间中用三角面片的形式来表现出被扫描物体的三维模型。由于三角形面片的数量过于庞大会降低模型修补的效率,因此在模型修补前需要对封装操作后得到的模型进行简化。
如图6所示,齿轮表面黄色区域为扫描过程中由于齿轮的结构特征、贴标记点、光线的原因造成的点云数据缺失,表现为孔洞。
如图7所示,基于曲率的方式填充齿轮复杂曲面,填充后待修复齿轮模型。
Geomagic Design X中的领域组分割功能,通过对整个失效齿轮模型进行领域分割、曲面拟合拼接后获取失效齿轮的重构模型,运用实体求差法,实现失效部位的3D特征重构。如图8和图9所示,对失效齿轮进行领域组的分割,在领域分割后对分割好的领域进行面片的拟合,将曲面拟合值所选单元领域上,将所有拟合的曲面进行拼接得到失效齿轮的整体模型,运用实体求差法,得到失效齿轮缺损部位的重构模型。
Geomagic Qualify逆向工程检测软件对齿轮的失效部位重构模型进行整体误差分析及标准偏差分析,确保重构模型精度能够满足齿轮再制造需要。如图10和图11所示,使用Geomagic Qualify软件对齿轮失效部位重构模型进行精度分析,通过模型的整体误差分析及关键点的误差分析综合确定失效部位的模型重构精度。表1为本发明的齿轮缺损部位模型重构整体误差分布表;表2为本发明的齿轮缺损部位模型重构标准偏差表。如下所示:
表1整体误差分布表
表2标准偏差表
以上实施例只为说明本发明的技术构思和特点,目的在于让本领域的技术人员了解本发明的内容并加以实施,并不能以此来限制本发明的保护范围,凡是根据本发明实质所作出的等效变化或修饰均属于本发明的保护范围。
- 一种基于RE的齿轮失效部位特征重构方法
- 一种基于最大生成树的纠删码失效节点重构路径选择方法