一种智能密集式混凝土养护系统及方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及建筑施工技术领域,具体涉及一种智能密集式混凝土养护系统及方法。
背景技术
在工程施工中,大量的结构物主要由混凝土浇筑而成,在进行混凝土浇筑时会取用混凝土做成标准试块进行标准养护,最后通过试验确定混凝土的强度。同时在进行混凝土配合比试验时,也会将混凝土做成标准试块进行标准养护。因此大量的混凝土试块需要在标准养护室中进行养护,目前混凝土标准养护室通常将混凝土试块放在固定的养护架上进行养护,但标准养护室空间有限。专利号CN210210826U一种可拆卸式混凝土试块养护支架提供了一种可移动可拆卸养护架,但当养护架上存放数量较多的试块时,养护架的移动非常不方便,同时有很多安全隐患。
发明内容
本发明所要解决的技术问题是提供一种智能密集式混凝土养护系统及方法,以克服上述现有技术中的不足。
本发明解决上述技术问题的技术方案如下:一种智能密集式混凝土养护系统,包括养护架、导轮、电机、控制模块、人机交互终端和测距装置,多个养护架并排布置,每个养护架的底部均转动设有多个对养护架进行支撑的导轮,每个养护架的底部均设有至少一个电机以驱动该养护架底部的至少一个导轮进行转动,每个养护架上均设有与该养护架底部的电机串联的控制模块,每个养护架上沿移动方向的两侧均设有测距装置,测距装置与其所在养护架上的控制模块串联,人机交互终端与每个控制模块电连接。
本发明的有益效果是:在养护架没有相关作业时,养护架密集式地均布,如间距20cm,当需要在某个指定的养护架上作业时,控制导轮、电机可根据需要将其他养护架按照指定的位置移动缩小间距,如间距5cm,从而空出指定养护架的作业空间进行相关作业,当作业完成后,不再需要作业空间,控制导轮、电机可将养护架间距增大,如间距20cm,从而保证养护环境满足标准养护的相关要求,通过采用上述方案,在同样的养护室内,可大大增加可放置的养护架和试块的数量,提高了工作效率,减少了人工移动养护架时的安全隐患。
在上述技术方案的基础上,本发明还可以做如下改进。
进一步,智能密集式混凝土养护系统还包括供电轨和受流器,供电轨沿养护架移动方向布置,每个养护架上均设有与供电轨电接触的受流器,每个养护架上的电机、控制模块、测距装置分别与该养护架上的受流器电连接。
采用上述进一步的有益效果为:可取消电缆敷设,防止电缆缠绕。
进一步,智能密集式混凝土养护系统还包括两根轨道,两根轨道平行布置,所有养护架并排布置于两根轨道上,每个养护架底部的导轮均与轨道滚动配合。
进一步,智能密集式混凝土养护系统还包括环境参数采集单元,每个养护架上均设有与该养护架上的控制模块串联的环境参数采集单元。
进一步,环境参数采集单元包括温度传感器和湿度传感器。
采用上述进两步的有益效果为:可以采集养护过程中的温湿度信息,为养护提供技术支持,以便根据需求进行调整。
进一步,电机为电动步机。
采用上述进一步的有益效果为:可以根据导轮与电动步机相关的参数得出电动步机每转一圈养护架所移动的距离,此时可以省掉部分测距装置。
进一步,控制模块包括第二通讯单元、处理单元二、控制单元一和手动控制单元,控制单元一、处理单元二和第二通讯单元依次串联;手动控制单元与电机串联;人机交互终端包括人机交互单元、处理单元一和第一通讯单元,人机交互单元、处理单元一和第一通讯单元依次串联,处理单元一与处理单元二通过第一通讯单元和第二通讯单元无线连接。
进一步,控制模块还包括显示单元二,显示单元二与处理单元二串联。
一种智能密集式混凝土养护系统的养护方法,包括如下步骤:
S100、人机交互终端发送测量各养护架之间、养护架与障碍物、养护架与轨道尽头距离的初始指令,各养护架上的控制模块获取该初始指令,并控制其上的测距装置测量距离;
S200、测距装置将所测得的距离值经控制模块传送至人机交互终端,人机交互终端根据所获取的距离值计算出每个养护架当前初始位置;
S300、人机交互终端根据标准养护空间距离指令计算出各养护架需要移动的方位及距离,并对应各养护架生成养护移动指令,然后将养护移动指令分别传送至对应养护架上的控制模块;
S400、控制模块获取养护移动指令后控制该养护架上的电机启动,以驱使导轮转动并让养护架向指定方向移动,同时养护架上的测距装置实时测距,当距离值达到指定距离值时向控制模块发送指令,控制模块根据指令控制电机停止,以使各养护架之间的间距达到标准养护空间距离,以及计算出每个养护架当前标准养护位置;
S500、在人机交互终端上输入任意指定两个相邻养护架之间养护空间距离调整指令,人机交互终端根据所获得的养护空间距离调整指令计算出其他各养护架需要移动的方位及距离,并对应各养护架生成调整移动指令,人机交互终端将调整移动指令分别传送至对应养护架上的控制模块;
S600、控制模块获取调整移动指令后控制该养护架上的电机启动,以使养护架向指定方向移动,同时养护架上的测距装置实时测距,当距离值达到指定距离值时向控制模块发送指令,控制模块根据指令控制电机停止,以使指定两个相邻养护架之间的间距达到指定养护调整间距,人机交互终端并计算出每个养护架当前调整位置;
S700、当需要恢复标准养护状态时,人机交互终端通过将各养护架调整位置与标准养护位置进行比较以计算出每个养护架所需要移动的方位及距离,并生成复位指令,人机交互终端将复位指令发送至对应养护架上的控制模块,控制模块获取复位指令后控制该养护架上的电机启动,以驱使导轮转动并让养护架向指定方向移动,同时养护架上的测距装置实时测距,当距离值达到指定距离值时向控制模块发送指令,控制模块根据指令控制电机停止,以使各养护架之间的间距复位至标准养护空间距离。
采用上述进一步的有益效果为:当需要在某个指定的养护架上作业时,控制导轮、电机可根据需要将其他养护架按照指定的位置移动缩小间距,如间距5cm,从而空出指定养护架的作业空间进行相关作业,当作业完成后,不再需要作业空间,控制导轮、电机可将养护架间距增大,如间距20cm,从而保证养护环境满足标准养护的相关要求,通过采用上述方案,在同样的养护室内,可大大增加可放置的养护架和试块的数量,提高了工作效率,减少了人工移动养护架时的安全隐患。
一种智能密集式混凝土养护方法,包括如下步骤:
S100、人机交互终端发送测量各养护架之间、养护架与障碍物、养护架与轨道尽头距离的初始指令,各养护架上的控制模块获取该初始指令,并控制其上的测距装置测量距离;
S200、测距装置将所测得的距离值经控制模块传送至人机交互终端,人机交互终端根据所获取的距离值计算出每个养护架当前初始位置;
S300、人机交互终端根据标准养护空间距离指令计算出各养护架需要移动的方位及距离,并对应各养护架生成养护移动指令,然后将养护移动指令分别传送至对应养护架上的控制模块;
S400、控制模块获取养护移动指令后控制该养护架上的电动步机启动,以驱使导轮转动并让养护架向指定方向移动,根据导轮与电动步机相关的参数计算出电动步机每转一圈养护架所移动的距离,再根据该距离控制电动步机旋转指定圈数,同时养护架上的测距装置实时测距,当距离值达到指定距离值时向控制模块发送指令,控制模块根据指令控制电动步机停止,以使各养护架之间的间距达到标准养护空间距离,以及计算出每个养护架当前标准养护位置;
S500、在人机交互终端上输入任意指定两个相邻养护架之间养护空间距离调整指令,人机交互终端根据所获得的养护空间距离调整指令计算出其他各养护架需要移动的方位及距离,并对应各养护架生成调整移动指令,人机交互终端将调整移动指令分别传送至对应养护架上的控制模块;
S600、控制模块获取调整移动指令后控制该养护架上的电动步机启动,以使养护架向指定方向移动,同时再根据该距离控制电动步机旋转指定圈数,养护架上的测距装置实时测距,当距离值达到指定距离值时向控制模块发送指令,控制模块根据指令控制电动步机停止,以使指定两个相邻养护架之间的间距达到指定养护调整间距,人机交互终端并计算出每个养护架当前调整位置;
S700、当需要恢复标准养护状态时,人机交互终端通过将各养护架调整位置与标准养护位置进行比较以计算出每个养护架所需要移动的方位及距离,并生成复位指令,人机交互终端将复位指令发送至对应养护架上的控制模块,控制模块获取复位指令后控制该养护架上的电动步机启动,以驱使导轮转动并让养护架向指定方向移动,同时再根据该距离控制电动步机旋转指定圈数,养护架上的测距装置实时测距,当距离值达到指定距离值时向控制模块发送指令,控制模块根据指令控制电动步机停止,以使各养护架之间的间距复位至标准养护空间距离。
采用上述进一步的有益效果为:当需要在某个指定的养护架上作业时,控制导轮、电机可根据需要将其他养护架按照指定的位置移动缩小间距,如间距5cm,从而空出指定养护架的作业空间进行相关作业,当作业完成后,不再需要作业空间,控制导轮、电机可将养护架间距增大,如间距20cm,从而保证养护环境满足标准养护的相关要求,通过采用上述方案,在同样的养护室内,可大大增加可放置的养护架和试块的数量,提高了工作效率,减少了人工移动养护架时的安全隐患。
附图说明
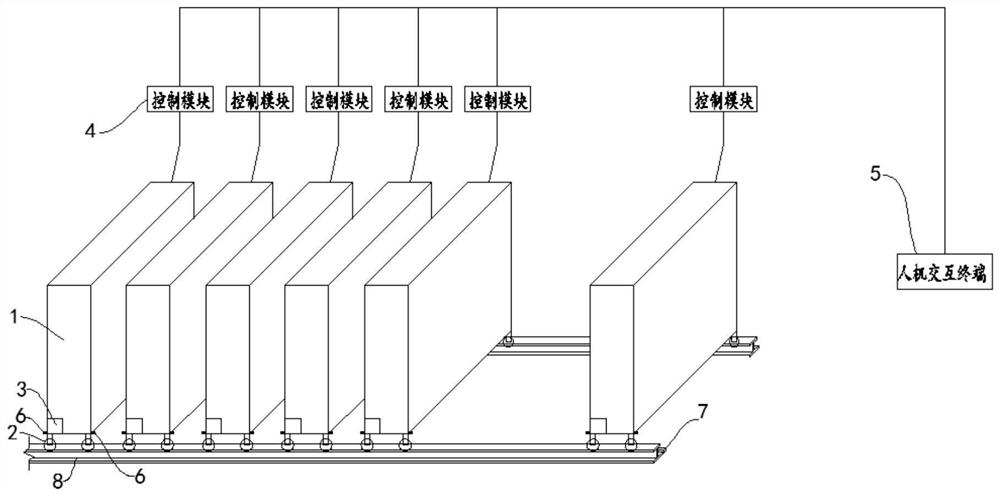
图1为本发明所述智能密集式混凝土养护系统的结构示意图;
图2为本发明所述智能密集式混凝土养护系统的部分电路图;
图3为本发明中所有养护架按标准养护间距布置图;
图4为本发明中所有养护架在进行间距调整的布置图。
附图中,各标号所代表的部件列表如下:
1、养护架,2、导轮,3、电机,4、控制模块,410、第二通讯单元,420、处理单元二,430、控制单元一,440、手动控制单元,450、显示单元二,5、人机交互终端,510、人机交互单元,520、处理单元一,530、第一通讯单元,6、测距装置,7、供电轨,8、轨道,9、环境参数采集单元。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
实施例1
如图1、图2所示,一种智能密集式混凝土养护系统,包括养护架1、导轮2、电机3、控制模块4、人机交互终端5和测距装置6,多个养护架1并排布置,每个养护架1的底部均转动设有多个对养护架1进行支撑的导轮2,通常情况下,每个养护架1底部所设导轮2的数量为4个,而4个导轮2分别位于养护架1的四个拐角处,每个养护架1的底部均设有至少一个电机3以驱动该养护架1底部的至少一个导轮2进行转动,当电机3驱动导轮2后,所形成的结构可以使得养护架1进行移动,每个养护架1上均设有与该养护架1底部的电机3串联的控制模块4,每个养护架1上沿移动方向的两侧均设有测距装置6,测距装置6与其所在养护架1上的控制模块4串联,人机交互终端5与每个控制模块4电连接。
实施例2
如图1、图2所示,本实施例为在实施例1的基础上所进行的进一步改进,其具体如下:
智能密集式混凝土养护系统还包括供电轨7和受流器,供电轨7沿养护架1移动方向布置,每个养护架1上均设有与供电轨7电接触的受流器,每个养护架1上的电机3、控制模块4、测距装置6分别与该养护架1上的受流器电连接,可以减小牵设线缆的麻烦。
实施例3
如图1、图2所示,本实施例为在实施例1或2的基础上所进行的进一步改进,其具体如下:
智能密集式混凝土养护系统还包括两根轨道8,两根轨道8平行布置,所有养护架1并排布置于两根轨道8上,每个养护架1底部的导轮2均与轨道8滚动配合。
实施例4
如图1、图2所示,本实施例为在实施例1~3任一实施例的基础上所进行的进一步改进,其具体如下:
智能密集式混凝土养护系统还包括环境参数采集单元9,每个养护架1上均设有与该养护架1上的控制模块4串联的环境参数采集单元9。
其中,环境参数采集单元9至少包括温度传感器和湿度传感器。
实施例5
如图1、图2所示,本实施例为在实施例1~4任一实施例的基础上所进行的进一步改进,其具体如下:
电机3为电动步机,可以根据导轮2与电动步机相关的参数得出电动步机每转一圈养护架1所移动的距离,此时可以省掉部分测距装置6。
对于实施例1~5任一实施例而言,测距装置6可以为测距传感器。
实施例6
如图2所示,本实施例为在实施例1~5任一实施例的基础上所进行的进一步改进,其具体如下:
控制模块4包括第二通讯单元410、处理单元二420、控制单元一430和手动控制单元440,控制单元一430、处理单元二420和第二通讯单元410依次串联;手动控制单元440与电机3串联;人机交互终端5包括人机交互单元510、处理单元一520和第一通讯单元530,人机交互单元510、处理单元一520和第一通讯单元530依次串联,处理单元一520与处理单元二420无线连接。
控制模块4还包括显示单元二450,显示单元二450与处理单元二420串联。
当电机为普通电机时,养护方法如下:
一种智能密集式混凝土养护方法,包括如下步骤:
S100、人机交互终端5发送测量各养护架1之间、养护架1与障碍物、养护架1与轨道8尽头距离的初始指令,各养护架1上的控制模块4获取该初始指令,并控制其上的测距装置6测量距离;
S200、测距装置6将所测得的距离值经控制模块4传送至人机交互终端5,人机交互终端5根据所获取的距离值计算出每个养护架1当前初始位置;
S300、人机交互终端5根据标准养护空间距离指令计算出各养护架1需要移动的方位及距离,并对应各养护架1生成养护移动指令,然后将养护移动指令分别传送至对应养护架1上的控制模块4;
S400、控制模块4获取养护移动指令后控制该养护架1上的电机3启动,以驱使导轮2转动并让养护架1向指定方向移动,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制模块4发送指令,控制模块4根据指令控制电机3停止,以使各养护架1之间的间距达到标准养护空间距离,以及计算出每个养护架1当前标准养护位置;
S500、在人机交互终端5上输入任意指定两个相邻养护架1之间养护空间距离调整指令,人机交互终端5根据所获得的养护空间距离调整指令计算出其他各养护架1需要移动的方位及距离,并对应各养护架1生成调整移动指令,人机交互终端5将调整移动指令分别传送至对应养护架1上的控制模块4;
S600、控制模块4获取调整移动指令后控制该养护架1上的电机3启动,以使养护架1向指定方向移动,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制模块4发送指令,控制模块4根据指令控制电机3停止,以使指定两个相邻养护架1之间的间距达到指定养护调整间距,人机交互终端5并计算出每个养护架1当前调整位置;
S700、当需要恢复标准养护状态时,人机交互终端5通过将各养护架1调整位置与标准养护位置进行比较以计算出每个养护架1所需要移动的方位及距离,并生成复位指令,人机交互终端5将复位指令发送至对应养护架1上的控制模块4,控制模块4获取复位指令后控制该养护架1上的电机3启动,以驱使导轮2转动并让养护架1向指定方向移动,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制模块4发送指令,控制模块4根据指令控制电机3停止,以使各养护架1之间的间距复位至标准养护空间距离。
当电机为电动步机时,养护方法如下:
一种智能密集式混凝土养护方法,包括如下步骤:
S100、人机交互终端5发送测量各养护架1之间、养护架1与障碍物、养护架1与轨道8尽头距离的初始指令,各养护架1上的控制模块4获取该初始指令,并控制其上的测距装置6测量距离;
S200、测距装置6将所测得的距离值经控制模块4传送至人机交互终端5,人机交互终端5根据所获取的距离值计算出每个养护架1当前初始位置;
S300、人机交互终端5根据标准养护空间距离指令计算出各养护架1需要移动的方位及距离,并对应各养护架1生成养护移动指令,然后将养护移动指令分别传送至对应养护架1上的控制模块4;
S400、控制模块4获取养护移动指令后控制该养护架1上的电动步机启动,以驱使导轮2转动并让养护架1向指定方向移动,根据导轮2与电动步机相关的参数计算出电动步机每转一圈养护架所移动的距离,再根据该距离控制电动步机旋转指定圈数,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制模块4发送指令,控制模块4根据指令控制电动步机停止,以使各养护架1之间的间距达到标准养护空间距离,以及计算出每个养护架1当前标准养护位置;
S500、在人机交互终端5上输入任意指定两个相邻养护架1之间养护空间距离调整指令,人机交互终端5根据所获得的养护空间距离调整指令计算出其他各养护架1需要移动的方位及距离,并对应各养护架1生成调整移动指令,人机交互终端5将调整移动指令分别传送至对应养护架1上的控制模块4;
S600、控制模块4获取调整移动指令后控制该养护架1上的电动步机启动,以使养护架1向指定方向移动,同时再根据该距离控制电动步机旋转指定圈数,养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制模块4发送指令,控制模块4根据指令控制电动步机停止,以使指定两个相邻养护架1之间的间距达到指定养护调整间距,人机交互终端5并计算出每个养护架1当前调整位置;
S700、当需要恢复标准养护状态时,人机交互终端5通过将各养护架1调整位置与标准养护位置进行比较以计算出每个养护架1所需要移动的方位及距离,并生成复位指令,人机交互终端5将复位指令发送至对应养护架1上的控制模块4,控制模块4获取复位指令后控制该养护架1上的电动步机启动,以驱使导轮2转动并让养护架1向指定方向移动,同时再根据该距离控制电动步机旋转指定圈数,养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制模块4发送指令,控制模块4根据指令控制电动步机停止,以使各养护架1之间的间距复位至标准养护空间距离。
以下以养护架1的数量为10个为例进行示例性说明,10个养护架1从左至右依次记为:1#、2#、3#、4#、5#、6#、7#、8#、9#、10#,如图3、图4所示;
一种智能密集式混凝土养护方法,包括如下步骤:
S100、人机交互单元510依次经处理单元一520和第一通讯单元530发送测量各养护架1之间、养护架1与障碍物、养护架1与轨道8尽头距离的初始指令,各养护架1上的处理单元二420通过第二通讯单元410与第一通讯单元530建立无线数据交互,并获取该初始指令,处理单元二420通过控制单元一430控制该养护架1上的测距装置6测量距离;
S200、测距装置6将所测得的距离值依次经控制单元一430、处理单元二420、第二通讯单元410、第一通讯单元530、处理单元一520传送至人机交互单元510,人机交互单元510根据所获取的距离值计算出每个养护架1当前初始位置;
S300、人机交互单元510根据标准养护空间距离指令计算出各养护架1需要移动的方位及距离,并对应各养护架1生成养护移动指令,然后将养护移动指令分别依次经处理单元一520、第一通讯单元530、第二通讯单元410、处理单元二420传送至对应养护架1上的控制单元一430;
S400、控制单元一430获取养护移动指令后控制该养护架1上的电机3启动,以驱使导轮2转动并让养护架1向指定方向移动,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时依次经控制单元一430、处理单元二420、第一通讯单元530、第二通讯单元410、处理单元二420向人机交互单元510发送指令,人机交互单元510根据指令控制电机3停止,以使各养护架1之间的间距达到标准养护空间距离,以及计算出每个养护架1当前标准养护位置;
S500、在人机交互单元510上输入任意指定两个相邻养护架1之间养护空间距离调整指令,例如,3#-4#,假设3#-4#之间需要工作空间1.85m,处理单元一520则计算出其他各养护架1间距缩短为50mm后则可满足要求,同时计算出各养护架1需移动的方向及距离1#位置不变、2#向左移动200mm、3#向左移动400mm、10#位置不变、9#向右移动200mm、8#向右移动400mm、7#向右移动600mm、6#向右移动800mm、5#向右移动1000mm、4#向右移动1200mm,人机交互单元510根据所获得的养护空间距离调整指令计算出其他各养护架1需要移动的方位及距离,并对应各养护架1生成调整移动指令,人机交互单元510将调整移动指令分别依次经处理单元一520、第一通讯单元530、第二通讯单元410、处理单元二420传送至对应养护架1上的控制单元一430,人机交互单元510可显示输入的数据和当前养护架1位置信息;
S600、控制单元一430获取调整移动指令后控制该养护架1上的电机3启动,以使养护架1向指定方向移动,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时人机交互单元510依次经处理单元一520、第一通讯单元530、第二通讯单元410、处理单元二420向控制单元一430发送指令,控制单元一430根据指令控制电机3停止,以使指定两个相邻养护架1之间的间距达到指定养护调整间距,人机交互单元510并计算出每个养护架1当前调整位置,人机交互单元510可显示输入的数据和当前养护架1移动的过程及移动后的信息,养护架1在移动过程中,当距离小于安全距离时控制单元一430下达停止电机3工作的指令,从而保障养护架1等器材及样品的安全,更保障了突发情况下工作人员的安全;
S700、当需要恢复标准养护状态时,人机交互单元510通过将各养护架1调整位置与标准养护位置进行比较以计算出每个养护架1所需要移动的方位及距离,并生成复位指令,人机交互单元510依次经处理单元一520、第一通讯单元530、第二通讯单元410、处理单元二420将复位指令发送至对应养护架1上的控制单元一430,控制单元一430获取复位指令后控制该养护架1上的电机3启动,以驱使导轮2转动并让养护架1向指定方向移动,同时养护架1上的测距装置6实时测距,当距离值达到指定距离值时向控制单元一430发送指令,控制单元一430根据指令控制电机3停止,以使各养护架1之间的间距复位至标准养护空间距离,人机交互单元510可显示输入的数据和恢复后养护架1的位置信息。
人机交互单元510还可显示养护架1上的温度及湿度信息;养护架1之间的障碍物信息;养护架1距离障碍物的安全距离等。人机交互单元510可输入需要的工作空间位置信息、空间大小信息、移动标的信息、移动方位和距离、养护架1之间分别的距离信息、养护架1与轨道8尽头距离信息、恢复养护状态信息等等。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种智能密集式混凝土养护系统及方法
- 一种混凝土智能控温控湿养护系统及养护方法