一种全自动桑树修剪、桑叶采集机械
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及农机领域,具体涉及一种全自动桑树修剪、桑叶采集机械。
背景技术
目前,我国蚕桑业中桑叶的采集和桑树的修剪主要依赖人力完成,对劳动力的需求较大,且劳动效率较低,难以进行大规模规范化的生产。
因此,蚕桑业需要一种可以自动化的桑树修剪、桑叶采集机械。
发明内容
本发明的目的在于克服上述问题,提供一种全自动桑树修剪、桑叶采集机械。本方案的技术效果如下:
一种全自动桑树修剪、桑叶采集机械,包括运动模块、支撑结构和功能模块,所述支撑结构包括支撑架和设于支撑架上的机械臂,所述支撑架底部与运动模块固定连接,所述机械臂顶部与支撑架固定连接底部与功能模块固定连接;
所述运动模块包括第二支撑架、滚轮、驱动电机和转向电机,所述第二支撑架顶部与支撑架固定连接,底部与滚轮连接,所述滚轮包括驱动轮和从动轮,所述驱动电机驱动驱动轮转动,所述转向电机驱动驱动轮转向,所述驱动轮上还设有转向角感应器;
所述功能模块包括底座、控制盒、角度调节机构、高度调节机构、水平调节机构、功能端和传感器,所述功能端为采桑器或剪枝器,所述传感器监控功能端位置,并将位置信息输送至控制盒内,所述控制盒接受传感器的数据,并控制角度调节机构、高度调节机构、水平调节机构的工作状态。
作为改进,所述角度调节机构包括角度调节电机和转盘,所述角度调节电机与底座固定连接,所述转盘与底座转动连接,所述转盘内侧设有内齿,所述角度调节电机的输出端设有与内齿配合的第一齿轮,所述第一齿轮带动转盘转动。
作为改进,所述高度调节机构包括齿条、高度调节电机、限位齿轮和夹板,所述高度调节电机与转盘固定连接,所述齿条垂直穿设在转盘上,所述高度调节电机的输出端设有与齿条配合的第二齿轮,所述夹板设于齿条和第二齿轮两侧,所述限位齿轮和第二齿轮将齿条夹在中间,防止齿条脱位。
作为改进,所述水平调节机构包括外壳、水平调节电机、第二齿条和第二限位齿轮,所述外壳顶部与齿条固定连接,所述水平调节电机固定连接在外壳侧部,所述水平调节电机的输出轴从外壳侧部穿入外壳内,并在外壳内部设有第三齿轮,所述第二齿条水平穿设在外壳上并与第三齿轮啮合,所述第二限位齿轮设于外壳内部,并与第三齿轮将第二齿条夹在中间,以防止第二齿条脱位。
作为改进,所述采桑器或剪枝器设于第二齿条末端。
作为改进,所述驱动轮顶部设有第二底座,所述驱动电机、转向电机和转向角感应器均与第二底座固定连接,所述第二底座底部设有齿盘,所述齿盘与第二底座转动连接并与驱动轮保持相同转向角度,所述转向角感应器下部设有与齿盘啮合的第二齿盘,并通过感应第二齿盘的转向角度确定驱动轮的转向。
作为改进,所述传感器的数量为多个,并排成一排;所述传感器顶部设有连接杆,所述连接杆顶部与底座固定连接。
作为改进,所述剪枝器为电动剪枝器,所述电动剪枝器底部设有控制开关,所述控制开关包括控制杆和设于控制杆底部的吊环。
本发明的优点在于:
本发明可以通过运动模块和功能模块控制功能端的高度、水平位置以及工作角度。同时,通过传感器监控功能端的工作状态。以达到自动修剪桑枝或自动进行桑叶采集的目的。
附图说明
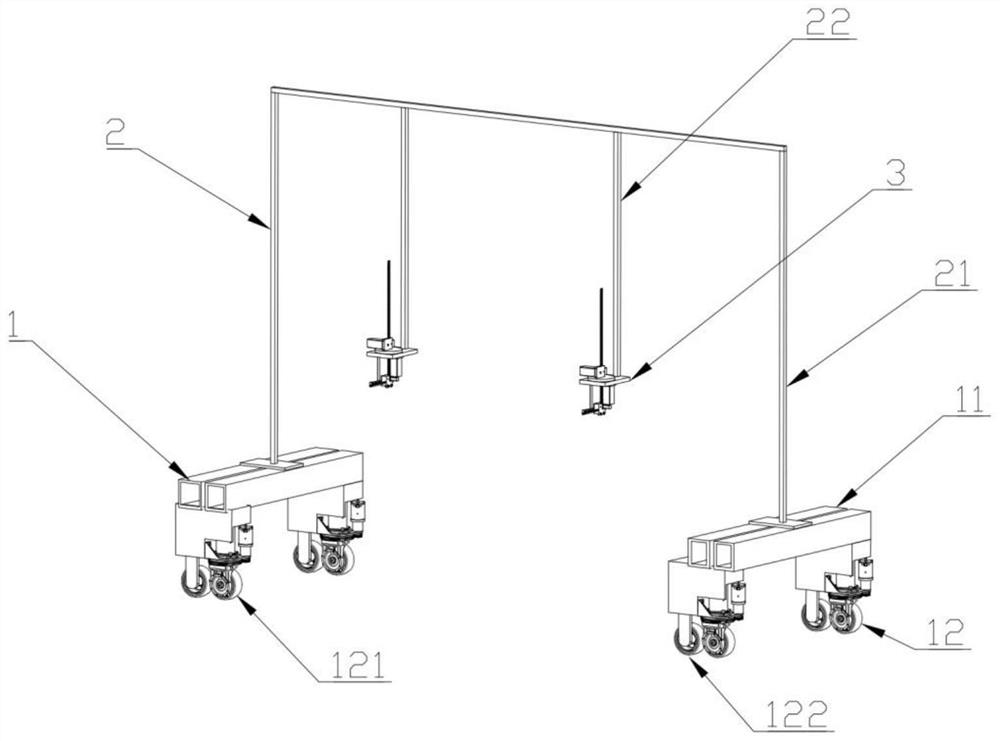
图1为实施例1中一种全自动桑树修剪、桑叶采集机械的结构图;
图2为实施例1中功能模块的结构图;
图3为实施例1中功能模块的剖面图;
图4为实施例1中水平调节机构的结构图;
图5为实施例1中功能端为电动剪枝器时的结构图;
图6为实施例1中运动模块的结构图;
图7为实施例2中功能端为采桑器的结构图。
图中标示为:
1-运动模块,11-第二支撑架,12-滚轮,121-驱动轮,122-从动轮,13-驱动电机,14-转向电机,15-转向角感应器,16-第二底座,17-齿盘,18-第二齿盘,2-支撑结构,21-支撑架,22-机械臂,3-功能模块,31-底座,32-控制盒,33-角度控制机构,331-角度调节电机,332-转盘,333-内齿,334-第一齿轮,34-高度调节机构,341-齿条,342-高度调节电机,343-限位齿轮,344-夹板,345-第二齿轮,35-水平调节机构,351-外壳,352-水平调节电机,353-第二齿条,354-第二限位齿轮,355-第三齿轮,36-功能端,37-传感器,38-连接杆。
具体实施方式
下面通过具体实施例对本发明进行详细和具体的介绍,以使更好的理解本发明,但是下述实施例并不限定本发明的保护范围。
实施例1
本实施例公开了一种全自动桑树修剪、桑叶采集机械,包括运动模块1、支撑结构2和功能模块3组成。支撑结构2包括支撑架21和设于支撑架21上的机械臂22。支撑架21底部与运动模块1固定连接,机械臂22顶部与支撑架21固定连接,底部与功能模块3固定连接。
功能模块3包括底座31、控制盒32、角度调节机构33、高度调节机构34、水平调节机构35、功能端36和传感器37。传感器37的数量为多个,并排成一排;传感器37顶部设有连接杆38,连接杆38顶部与底座31固定连接。传感器37采集桑树枝条的位置信息,采集桑树枝条的位置信息输送至控制盒32内,控制盒32接收传感器37的数据,并控制角度调节机构33、高度调节机构34、水平调节机构35的工作状态。
角度调节机构33包括角度调节电机331和转盘332,角度调节电机331与底座31固定连接,转盘332与底座31转动连接,转盘332内侧设有内齿333,角度调节电机331的输出端设有与内齿333配合的第一齿轮334,第一齿轮334带动转盘332转动。
高度调节机构34包括齿条341、高度调节电机342、限位齿轮343和夹板344。高度调节电机342与转盘332固定连接,齿条341垂直穿设在转盘332上,高度调节电机342的输出端设有与齿条341配合的第二齿轮345,夹板344设于齿条341和第二齿轮345两侧,限位齿轮343和第二齿轮345将齿条341夹在中间,防止齿条341脱位。
水平调节机构35包括外壳351、水平调节电机352、第二齿条353和第二限位齿轮354。外壳351顶部与齿条341固定连接,水平调节电机352固定连接在外壳351侧部,水平调节电机352的输出轴从外壳351侧部穿入外壳351内,并在外壳351内部设有第三齿轮355,第二齿条353水平穿设在外壳351上并与第三齿轮355啮合,第二限位齿轮354设于外壳351内部,并与第三齿轮355将第二齿条353夹在中间,以防止第二齿条353脱位。
运动模块1包括第二支撑架11、滚轮12、驱动电机13和转向电机14。第二支撑架11顶部与支撑架21固定连接,底部与滚轮12连接。滚轮12包括驱动轮121和从动轮122,驱动电机13驱动驱动轮121转动,转向电机14驱动驱动轮121转向,驱动轮121上还设有转向角感应器15。
驱动轮121顶部设有第二底座16,驱动电机13、转向电机14和转向角感应器15均与第二底座16固定连接。第二底座16底部设有齿盘17,齿盘17与第二底座16转动连接,并与驱动轮121保持相同转向角度。转向角感应器15下部设有与齿盘17啮合的第二齿盘18,并通过感应第二齿盘18的转向角度确定驱动轮121的转向。
转向角感应器15将信号传送至控制盒32内,控制盒32根据转向角15感应器的信号控制转向电机14的工作状态。
本实施中的功能端36为电动剪枝器361。电动剪枝器361末端与第二齿条353末端可拆卸连接。电动剪枝器361底部设有控制开关362,控制开关362包括控制杆363和设于控制杆363底部的吊环364。当吊环364底部碰触到桑树主干时,电动剪枝器361开始自动剪枝。
实施例2
本实施例公开了本实施例公开了一种全自动桑树修剪、桑叶采集机械。本实施例中的功能端36为采桑器365,本实施例的其他结构与实施例相同。
以上对本发明的具体实施例进行了详细描述,但其只是作为范例,本发明并不等同于以上描述的具体实施例。对于本领域技术人员而言,任何对本发明进行的等同修改和替代也都在本发明的范畴之中。因此,不脱离本发明的精神和范围下所做的均等变换和修改,都应涵盖在本发明的范围内。
- 一种全自动桑树修剪、桑叶采集机械
- 一种全自动桑树修剪、桑叶采集机械