一种微波雷达的对象融合方法及其应用系统
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及一种微波雷达的对象融合方法及其应用系统。
背景技术
雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
雷达与视频监控相比有很多天然的优势,如雷达在白天黑夜均能探测远距离的目标,有一定的穿透能力,而且不受雾、云和雨的阻挡,具有全天候、全天时的特点。
微波雷达是根据时间进行数据生成的,每隔一段时间产生当前时间雷达切面上所有目标的数据。同一时间产生的所有数据作为同一批次数据进行输出,也就是说微波雷达每隔一个固定的时间发送一个批次的数据,该批次数据包含多个目标的信息。
在一条道路上利用一定数量的微波雷达对整条道路进行覆盖式的安装,追踪车辆在整条道路上的运行轨迹及速度信息,方便对整条道路上的所有车辆进行宏观的观察和调控。
但在实际应用过程中,雷达数量增多导致需要处理的雷达数据非常庞大而传统的应用架构无法满足需求,多个雷达之间并没有联动关系,雷达本身的精确度有限,道路情况复杂而难以对整条道路进行全部雷达信号覆盖,如硬路肩、跨线桥、情报板、树木、指示牌等遮挡物,弯道、港湾、上下匝道、停车带、等特殊路况,导致存在大量的信号盲区。
发明内容
为了克服已有微波雷达的精确度有限、存在大量的信号盲区的不足,本发明提供了一种提高精确度、有效减少信号盲区的微波雷达的对象融合方法及其应用系统,解决超大量雷达数据的处理、多雷达联动协同、雷达信号盲区及精确度等问题,对多个雷达的数据进行实时的对象融合,实现对目标的全流程追踪。
本发明解决其技术问题所采用的技术方案是:
一种微波雷达的对象融合方法,包括以下步骤:
1)数据融合服务接收到雷达的数据,是根据时间区分的批次数据,每一批数据是在一个时间点的所有数据,雷达会按照固定的时间间隔定时发送每一批数据;
2)对接收到的本批次数据进行数据清理,剔除掉一些错误、不符合规则的数据,避免这些异常数据对后续的数据融合产生不利影响;
3)对清理后的数据根据批次时间进行重排,因为雷达在数据产生后到达融合服务时可能会经过很多步骤,导致融合服务接收到的雷达多批数据时间顺序发生变化,因此需要重排以保证下一步接收到的多批数据是按照时间先后顺序排列的;
4)对本批次的每一条数据都在同一雷达的本地融合缓存中找到对应的对象,融合为同一个对象,融合成功的数据直接进入汇总,融合失败的进行下一步;
5)相同雷达融合失败的数据,在前一个雷达的融合中计算并判断归属于哪一个对象,融合成功的数据直接进入汇总,融合失败的进入下一步;
6)二次融合失败的数据,说明应该是一个新的对象,为该数据生成一个新的对象;
7)汇总本批次所有的融合数据;
8)根据前一个雷达的融合缓存对本批次所有融合数据进行修正,补充缺失的融合数据;
9)根据当前雷达的融合缓存对上一批次中存在但在本批次融合数据为出现的数据进行预测,补充缺失的融合数据;
10)汇总所有融合数据进行输出,本批次数据融合完成。
进一步,所述步骤3)中,数据重排的过程如下:
3.1)接收到雷达的每一批数据后,把每一批数据压入一个按照批次时间升序的队列;
3.2)每次取批次时间最早的一批数据;
3.3)如果该批数据的批次时间早于上一次处理数据时的批次时间,则该批数据不再处理,舍弃掉该批数据;
3.4)如果该批数据进入系统的时间超过一个过期阈值,则说明该批数据已过期,舍弃掉该批数据;
3.5)如果该批数据进入系统的时间超过了处理阈值,则说明该批数据可以处理,进入下一步;
3.6)如果该批数据进入系统的时间没有超过处理阈值,则说明数据还暂时不能处理,重新把数据放进队列;
3.7)从队列中取最早的数据进行处理,以此类推,循环执行。
再进一步,所述步骤8)中,修正的过程如下:
8.1)接收到本批次的融合数据;
8.2)找到在上一批次融合数据中存在但是在本批次融合数据中不存在的融合对象;
8.3)根据速度、时间等预测上批数据在本批数据的位置,形成预测的数据;
8.4)把预测的数据与本批融合数据中的新生成对象进行比对,如果一致,进行对象的合并;
8.5)如果没有一致的新对象,则说明该预测数据合理;
8.6)把合理的预测数据也加入本批次融合数据;
8.7)数据修正完成。
更进一步,所述步骤9)中,预测的过程如下:
9.1)接收到本批次的融合数据;
9.2)找到在前一个雷达融合数据中存在但是在本批次融合数据中不存在的融合对象;
9.3)根据速度、时间等预测上批数据在本批数据的位置,形成预测的数据;
9.4)把预测的数据与本批融合数据中的新生成对象进行比对,如果一致,进行对象的合并;
9.5)如果没有一致的新对象,则说明该预测数据合理;
9.6)把合理的预测数据也加入本批次融合数据;
9.7)数据预测完成。
一种微波雷达的对象融合方法的应用系统,包括融合支持模块、调度模块和协同模块,
所述融合支持模块包括内存型数据库、消息队列和RDBMS数据库,为调度信息、配置信息、任务信息提供支持;
所述融合调度模块用于把不限数量的雷达基于物理位置进行排序,并根据负载把各个雷达均衡分配到各个业务容器中,做到每个雷达的数据同一时间只会有一个应用容器进行处理,同时在雷达有变动或融合容器有变动时自动进行重新负载并通知各个融合容器;
所述融合协同模块则是用于处理多雷达数据的智能共享,所述融合协同模块的容器中运行所述对象融合方法。
进一步,所述融合协同模块中,在一条道路上,根据雷达数量的不同有不同的规模,根据雷达数据进行对象融合时,需要与前面及后面的雷达进行数据分享,为了能够承载无限数量的雷达数据,采用雷达数据串联技术;同一个融合容器内多个雷达的融合数据是共享的,把一个融合容器内的最后一个雷达的融合数据实时同步给下一个相邻的融合容器,保证每个融合服务容器都可以拿到数据融合所需要的所有数据,从而保证整个数据融合系统理论上可以融合不限数量雷达的数据。
本发明的有益效果主要表现在:解决超大量雷达数据的处理、多雷达联动协同、雷达信号盲区及精确度等问题,对多个雷达的数据进行实时的对象融合,实现对目标的全流程追踪。
附图说明
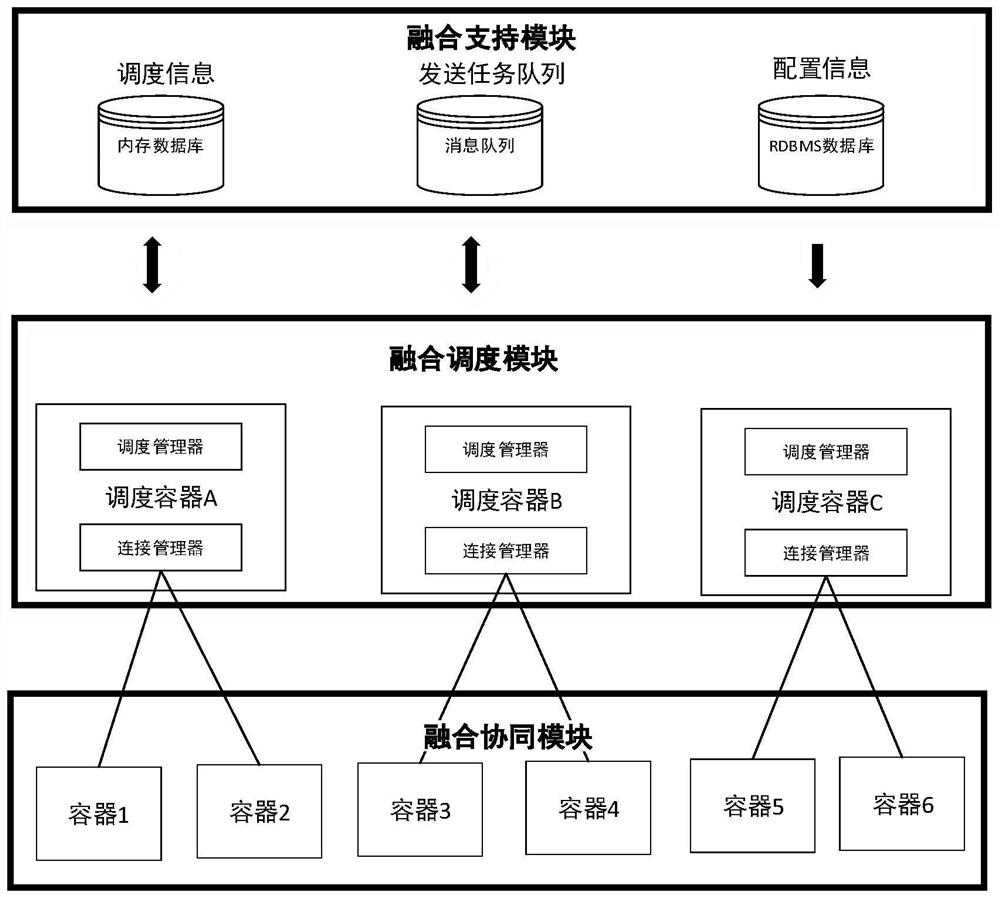
图1是一种微波雷达的对象融合方法的应用系统的原理框图。
图2是分布式对象融合方法的流程图。
图3是数据重排的流程图。
图4是轨迹修正的流程图。
图5是轨迹预测的流程图。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图2,一种微波雷达的对象融合方法,包括以下步骤:
1)数据融合服务接收到雷达的数据,是根据时间区分的批次数据,每一批数据是在一个时间点的所有数据,雷达会按照固定的时间间隔定时发送每一批数据;
2)对接收到的本批次数据进行数据清理,剔除掉一些错误、不符合规则的数据,避免这些异常数据对后续的数据融合产生不利影响;
3)对清理后的数据根据批次时间进行重排,因为雷达在数据产生后到达融合服务时可能会经过很多步骤,导致融合服务接收到的雷达多批数据时间顺序发生变化,因此需要重排以保证下一步接收到的多批数据是按照时间先后顺序排列的;
4)对本批次的每一条数据都在同一雷达的本地融合缓存中找到对应的对象,融合为同一个对象,融合成功的数据直接进入汇总,融合失败的进行下一步;
5)相同雷达融合失败的数据,在前一个雷达的融合中计算并判断归属于哪一个对象,融合成功的数据直接进入汇总,融合失败的进入下一步;
6)二次融合失败的数据,说明应该是一个新的对象,为该数据生成一个新的对象;
7)汇总本批次所有的融合数据;
8)根据前一个雷达的融合缓存对本批次所有融合数据进行修正,补充缺失的融合数据;
9)根据当前雷达的融合缓存对上一批次中存在但在本批次融合数据为出现的数据进行预测,补充缺失的融合数据;
10)汇总所有融合数据进行输出,本批次数据融合完成。
分布式对象融合方法在本发明中是实际对雷达数据进行对象融合的过程。
数据重排是融合算法中一个重要的数据预处理组件,用于对执行融合的多批次雷达数据根据批次时间进行重新排序,解决数据传输中可能出现的乱序问题,保证多批雷达数据是按照时间先后顺序排列的。参照图3,所述步骤3)中,数据重排的过程如下:
3.1)接收到雷达的每一批数据后,把每一批数据压入一个按照批次时间升序的队列;
3.3)每次取批次时间最早的一批数据;
3.3)如果该批数据的批次时间早于上一次处理数据时的批次时间,则该批数据不再处理,舍弃掉该批数据;
3.4)如果该批数据进入系统的时间超过一个过期阈值,则说明该批数据已过期,舍弃掉该批数据;
3.5)如果该批数据进入系统的时间超过了处理阈值,则说明该批数据可以处理,进入下一步;
3.6)如果该批数据进入系统的时间没有超过处理阈值,则说明数据还暂时不能处理,重新把数据放进队列;
3.7)从队列中取最早的数据进行处理,以此类推,循环执行。
轨迹修正是融合算法中的数据优化组件,用于补充在前一个雷达的融合数据中存在但在本雷达的融合数据中不存在的对象,解决对象在不同雷达之间切换时导致的对象不一致、数据丢失问题。参照图4,所述步骤8)中,修正的过程如下:
8.1)接收到本批次的融合数据;
8.2)找到在上一批次融合数据中存在但是在本批次融合数据中不存在的融合对象;
8.3)根据速度、时间等预测上批数据在本批数据的位置,形成预测的数据;
8.4)把预测的数据与本批融合数据中的新生成对象进行比对,如果一致,进行对象的合并;
8.5)如果没有一致的新对象,则说明该预测数据合理;
8.6)把合理的预测数据也加入本批次融合数据;
8.7)数据修正完成。
轨迹预测与轨迹修正存在不少相同点,但也是独立于轨迹修正的重要组件,参照图5,所述步骤9)中,预测的过程如下:
9.2)接收到本批次的融合数据;
9.2)找到在前一个雷达融合数据中存在但是在本批次融合数据中不存在的融合对象;
9.3)根据速度、时间等预测上批数据在本批数据的位置,形成预测的数据;
9.4)把预测的数据与本批融合数据中的新生成对象进行比对,如果一致,进行对象的合并;
9.5)如果没有一致的新对象,则说明该预测数据合理;
9.6)把合理的预测数据也加入本批次融合数据;
9.6)数据预测完成。
参照图1,一种微波雷达的对象融合方法的应用系统,包括融合支持模块、调度模块和协同模块,
所述融合支持模块包括内存型数据库、消息队列和RDBMS数据库,为调度信息、配置信息、任务信息提供支持;
所述融合调度模块用于把不限数量的雷达基于物理位置进行排序,并根据负载把各个雷达均衡分配到各个业务容器中,做到每个雷达的数据同一时间只会有一个应用容器进行处理,同时在雷达有变动或融合容器有变动时自动进行重新负载并通知各个融合容器;
所述融合协同模块则是用于处理多雷达数据的智能共享,所述融合协同模块的容器中运行所述对象融合方法。
所述融合协同模块中,在一条道路上,根据雷达数量的不同有不同的规模,根据雷达数据进行对象融合时,需要与前面及后面的雷达进行数据分享,为了能够承载无限数量的雷达数据,采用雷达数据串联技术;同一个融合容器内多个雷达的融合数据是共享的,把一个融合容器内的最后一个雷达的融合数据实时同步给下一个相邻的融合容器,保证每个融合服务容器都可以拿到数据融合所需要的所有数据,从而保证整个数据融合系统理论上可以融合不限数量雷达的数据。
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
- 一种微波雷达的对象融合方法及其应用系统
- 一种微波雷达与北斗融合的三维形变测量方法