集成井施工系统操作
文献发布时间:2023-06-19 09:36:59
相关申请的交叉引用
本申请要求2018年3月9日提交的标题为“SYSTEM AND METHOD FOR REAL-TIMEANALYSIS OF DRILLING OPERATIONS”的美国临时申请号62/640,999和2018年3月9日提交的标题为“SYSTEM AND METHOD FOR INTEGRATING MULTIPLE DRILLING EQUIPMENT INTO ASINGLE CONTROL NETWORK”的美国临时申请号62/641,021以及2018年3月9日提交的标题为“SYSTEM AND METHOD FOR CONTROLLING DRILLING OPERATIONS”的美国临时申请号62/640,976的优先权和权益,
所述申请的全部公开内容据此以引用的方式并入本文。
背景技术
通常将井钻入地下或海床,以采收石油、天然气和被截留在地下地层中的其他材料的天然沉积物。利用具有以协调的方式操作的各种地面和地下井场装备的井施工系统,在井场处将这类井钻入地下地层中。井场装备可分为各种子系统,其中每个子系统执行由对应的本地和/或远程定位的控制器控制的不同操作。子系统除其他实例之外可包括钻机控制系统、流体控制系统、受控压力钻井控制系统、气体监测系统、闭路电视系统、节流压力控制系统和井压控制系统。
井场装备通过位于井场地面处的控制中心进行监测和控制。典型的控制中心包含井场控制站,所述井场控制站被若干人类井场操作员(例如,钻工)用来监测和控制井场装备。尽管装备子系统可以协调的方式操作,但是在子系统与其控制器之间几乎不存在通信。因此,可通过井场控制站的对应的控制面板来执行对井场装备或装备子系统的监测和控制。每个控制面板包括相关联的视频输出装置(例如,视频监视器)和多个输入装置(例如,按钮、开关、操纵杆等)。
因为在装备子系统之间不存在通信,所以各种井场装备之间的交互和协调通常由井场操作员发起。例如,井场操作员可监测装备子系统以识别操作和安全事件,并且手动实现过程来抵消这类事件。因此,典型的井场控制中心可由多个井场操作员来操纵,每个操作员通过对应的控制面板监测和控制不同的井场装备或装备子系统。依赖多个井场操作员来监测和手动控制井场装备增加了成本,并且限制了井施工操作的速度、效率和安全性。
发明内容
提供本概述是为了介绍将在下面详细描述中进一步描述的一系列概念。本概述既不旨在识别所要求保护的主题的不可或缺的特征,也不旨在用于帮助限制所要求保护的主题的范围。
本公开介绍了一种集成井施工系统(IWCS),其能够操作以用于通过对共同控制所述IWCS的集成子系统的集成控制装置的集成控制来对井进行施工。所述IWCS包括:IWCS通信网络;所述集成控制装置,每一者与所述IWCS通信网络直接连接;所述集成子系统;以及控制工作站,所述控制工作站与所述IWCS通信网络直接连接,并且能够操作以控制所述集成控制装置中的每一者,从而控制所述集成子系统。
本公开还介绍了一种控制工作站,所述控制工作站与通信网络直接连接并且能够操作以控制各自与所述通信网络直接连接的多个集成控制装置中的每一者。每个集成控制装置控制IWCS的对应部件,由此对所述集成控制装置的控制通过所述控制工作站的操作控制所述IWCS。
本公开还介绍了一种计算机程序产品,其包括有形的、计算机可读的、非暂时性的介质,所述介质在其上存储有用于以下的指令:自动控制控制IWCS的集成子系统的集成控制装置,以执行用于对井进行施工的预定操作顺序的组合;由人类操作员通过控制工作站的操作接收要由所述IWCS执行的操作顺序中的一者的选择;由所述人类操作员通过所述控制工作站的操作接收在所选择操作顺序期间要操作的所述IWCS的第一机器的设置;以及响应于所述人类操作员通过所述控制工作站的操作接收到单个开始输入,使用所接收设置自动起动和控制所述IWCS的第一机器和第二机器以执行所选择操作顺序。
本公开还介绍了一种方法,所述方法包括操作包括光纤环形网络的IWCS。光纤环形网络的节点包括:形成所述IWCS的各个机械件的可编程逻辑控制器(PLC);视频馈送;钻井操作员控制;高级监控;以及它们的组合。
本公开还介绍了一种设备,所述设备包括通信网络和各自与所述通信网络直接连接的集成控制装置。每个集成控制装置控制IWCS的对应部件。所述IWCS能够操作以用于对井进行施工,而无需不受所述集成控制装置中的任一者控制的其他部件。所述设备还包括控制工作站,所述控制工作站与所述通信网络直接连接并且能够操作以控制所述集成控制装置中的每一者从而控制所述IWCS。
本公开还介绍了一种设备,所述设备包括通信网络和各自与所述通信网络直接连接的集成控制装置。所述集成控制装置控制对应的IWCS部件。除不受所述集成控制装置中的任一者控制的任何部件之外的所述IWCS部件能够共同操作以用于对井进行施工。所述设备还包括控制工作站,所述控制工作站与所述通信网络直接连接并且能够操作以控制所述集成控制装置中的每一者从而控制所述IWCS。
本公开还介绍了一种设备,所述设备包括通信网络和各自与所述通信网络直接连接的集成控制装置。每个集成控制装置控制集成井施工部件中的对应的一者或多者。所述集成井施工部件形成能够操作以用于对井进行施工而无需任何其他部件的集成井施工系统。控制工作站与所述通信网络直接连接,并且能够操作以控制每个集成控制装置,从而控制所述集成井施工部件。
本公开还介绍了一种方法,所述方法包括:致使井施工系统执行井施工操作,由此实时地自动收集和分析与所述井施工操作相关联的数据,以基于所述数据确定参数,并且所确定参数中的至少一些用于控制所述井施工操作。
本公开还介绍了一种方法,所述方法包括:致使井施工系统执行井施工操作,由此实时地自动收集和分析与所述井施工操作相关联的数据,以基于所述数据确定参数,并且所确定参数中的至少一些各自为触发至少一个实时井施工操作警报提供基础。
本公开还介绍了一种设备,所述设备包括在井施工操作期间与井施工系统结合利用的随钻分析(AWD)控制系统。所述AWD控制系统的输入包括:在井施工操作期间由井施工系统所施工的井的预期配置;在井施工操作期间由井施工系统使用的钻柱的配置;来自钻井参数传感器的信号;以及钻井装备参数。所述AWD控制系统的输出包括对以下的实时确定:所述井的深度和轨迹;钻头深度;井中的钻柱管件和/或立根的数量;钻柱容积、位移和重量;钻井液罐容积和罐选择;钻井液损失和/或增益;泥浆补给罐容积差;泥浆补给罐累积容积;钻井液泵送系统的总和/或每区段行程和/或要经历的行程;钻井液泵送系统的总行程率;钻井液泵送系统缸套容量和效率;进入井中的个别和总体钻井液流量;环空钻井液速度;总和/或每区段钻井液容积;每区段总分钟数和/或要经历的分钟数;钻井液回流;钻头运行时间和转数;钻压;穿透率;吊钩负荷和立管压力。来自所述AWD控制系统的输出可还包括井溢流计算器和压井记录表。来自所述AWD控制系统的输出可还包括传感器和计算以用于存储在与所述井施工系统相关联的历史数据中。来自所述AWD控制系统的输出可还包括井施工操作警告和警报。
本公开还介绍了一种设备,所述设备包括控制工作站,所述控制工作站与通信网络直接连接并且能够操作以控制各自与所述通信网络直接连接的多个控制装置。每个控制装置控制IWCS的对应部件,由此对所述控制装置的控制通过所述控制工作站的操作控制所述IWCS。所述控制工作站包括显示器、处理器和存储器,所述存储器存储:当由所述处理器执行时控制每个控制装置的施工程序;以及AWD程序。所述AWD系统的输入包括:在井施工操作期间由井施工系统所施工的井的预期配置;在井施工操作期间由井施工系统使用的钻柱的配置;来自钻井参数传感器的信号;以及钻井装备参数。所述AWD程序在由处理器执行时实时生成并且在显示器上的AWD屏幕中实时显示以下中的一者或多者:井的预期配置和/或实际配置的图形显示,包括深度;井中鞋的图形显示;井的预期和实际配置的动画;井中钻柱的动画;钻井液前沿跟踪和/或深度的值文本和/或图形显示;每区段的环空速度;裸眼容积;针对以下的一者或多者的总行程和分钟数、要经历的行程和分钟数以及容积:地面到钻头、钻头到鞋、钻头到防喷器、钻头到地面;井循环;全循环;钻柱位移,开口端和闭合端;钻柱重量;井中的管件的数量;有效容积;进入井中的钻井液流量;钻头转数;以及钻头运行时间。
本公开还介绍了一种包括用于与IWCS一起使用的控制工作站的设备。所述IWCS能够操作以用于通过对共同控制所述IWCS的集成子系统的集成控制装置的集成控制来对井进行施工。所述控制工作站包括人机接口(HMI),所述人机接口包括显示器、触摸屏、操纵杆以及处理系统,所述处理系统包括处理器和上面具有施工程序的存储器,所述施工程序在由所述处理器执行时:向所述控制工作站的人类操作员呈现设置向导,所述设置向导引导所述操作员输入让所述集成子系统的一个或多个井施工机器执行井施工顺序的操作参数;并且控制所述集成控制装置并且因此控制所述集成子系统来基于所输入操作参数执行所述井施工顺序。
本公开还介绍了一种设备,所述设备包括IWCS,其能够操作以用于通过对共同控制所述IWCS的集成子系统的集成控制装置的集成控制来对井进行施工。所述IWCS包括处理系统,所述处理系统包括处理器和上面具有施工程序的存储器,所述施工程序在由所述处理器执行时:在多个预定操作顺序中的每一者期间控制每个集成控制装置,并且因此控制每个集成子系统;并且防止所述IWCS的机器之间发生碰撞。
本公开还介绍了一种方法,所述方法包括:利用多个自动控制的井施工机器中的每一者来对井进行施工,所述多个自动控制的井施工机器包括:绞车;铁钻工;钳操纵车;钳操纵臂;猫道;管件递送臂;下部稳定臂;上部管件约束件;中间管件约束件;下部管件约束件;顶驱;顶驱吊卡;指梁;转移桥排管器;立根盒引导臂;鼠洞;鼠洞;钻井液泵送系统;以及钻井液重调系统。
本公开还介绍了一种系统,所述系统能够操作以完全控制井施工操作的多个预定操作顺序中的每一者。所述顺序包括:上提单个管件;进行钻井连接;建造管件立根;下入钻铤立根;起出钻铤立根;湿起钻;倒划眼;使用顶驱将单个管件从井中心移动到猫道;将管件立根从所述井中心移动到所述猫道;使用套管钳将套管从所述猫道移动到所述井中心;使用管件递送臂和下套管工具将套管从所述猫道移动到所述井中心;使用所述顶驱和所述下套管工具将大直径套管从所述猫道移动到所述井中心;建造套管立根;以及在不使用所述下套管工具的情况下下入套管立根。
本公开的这些和另外的方面在以下的描述中进行了阐述,和/或可由本领域普通技术人员通过阅读本文的材料和/或实践本文所述的原理来进行学习。本公开的至少一些方面可通过所附权利要求中叙述的手段来实现。
附图说明
本公开在与附图一起阅读以下详细描述时得到最佳理解。应强调的是,根据行业中的标准惯例,各种特征并未按比例绘制。事实上,为了论述清楚起见,可任意增大或减小各种特征的尺寸。
图1是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
图2是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
图3是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
图4是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
图5是根据本公开的一个或多个方面的设备的示例性实现方式的至少一部分的透视图。
图6是根据本公开的一个或多个方面的图5所示的设备的一部分的透视图。
图7是根据本公开的一个或多个方面的图6所示的设备的示例性实现方式的一部分的顶视图。
图8至图10是根据本公开的一个或多个方面的由图7所示的设备显示的软件控件的示例性实现方式。
图11至图21是根据本公开的一个或多个方面的由图7所示的设备显示的屏幕的示例性实现方式。
图22是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
图23是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
图24是根据本公开的一个或多个方面的设备或系统的示例性实现方式的至少一部分的示意图。
具体实施方式
应当理解,以下公开描述了本文所介绍的不同方面的许多示例性实现方式。下面描述部件和布置的具体实例以简化本公开。这些仅仅是实例,并且不旨在进行限制。此外,本公开可在各种实例中重复附图标号和/或字母。此重复是为了简单和清楚起见,并且本身并不决定本文所描述的各种实现方式之间的关系。此外,在以下描述中,第一特征在第二特征之上或在其上的形成可包括第一特征和第二特征形成为直接接触的实现方式,并且还可包括可形成介于第一特征和第二特征之间的附加特征以使得第一特征和第二特征可不直接接触的实现方式。
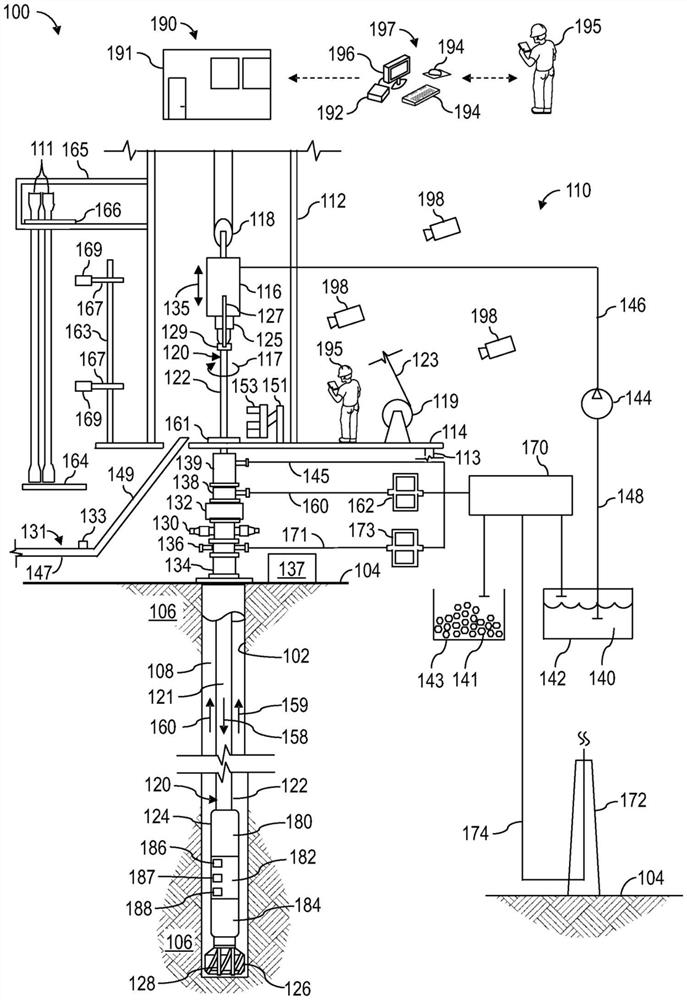
图1是根据本公开的一个或多个方面的集成井施工系统100(即,钻机)的示例性实现方式的至少一部分的示意图。井施工系统100表示示例性环境,在所述示例性环境中可实现下面描述的本公开的一个或多个方面。尽管将井施工系统100描绘为陆上实现方式,但是下面描述的方面也适用于海上实现方式。
相对于通过从井场地面104旋转和/或定向钻井并且延伸到地下地层106中形成的井筒102描绘了井施工系统100。井施工系统100包括位于井场地面104处的地面装备110和悬挂在井筒102内的钻柱120。地面装备110可包括桅型井架、井架和/或设置在钻台114上方的另一个支撑结构112。钻柱120可从支撑结构112悬挂在井筒102内。支撑结构112和钻台114由腿部和/或其他支撑结构113共同支撑在井筒102的上方。
钻柱120可包括底部钻孔组件(BHA)124和用于在井筒102内输送BHA 124的装置122。输送装置122可包括钻杆、加重钻杆(HWDP)、有线钻杆(WDP)和/或用于在井筒102内输送BHA 124的其他装置。BHA 124的井下端可包括或联接到钻头126。钻头126的旋转和钻柱120的重量共同操作以形成井筒102。钻头126可从井场地面104和/或通过与钻头126连接的井下泥浆马达(未示出)旋转。
BHA 124还可包括各种井下工具180、182、184。这类井下工具180、182、184中的一者或多者可以是或包括声学工具、密度工具、定向钻井工具、电磁(EM)工具、地层采样工具、地层测试工具、重力工具、监测工具、中子工具、核工具、光电因子工具、孔隙度工具、储层表征工具、电阻率工具、旋转速度感测工具、随钻取样(SWD)工具、地震工具、勘测工具、扭转感测工具和/或其他随钻测量(MWD)或随钻测井(LWD)工具。
井下工具180、182、184中的一者或多者可以是或包括MWD或LWD工具,所述MWD或LWD工具包括传感器封装件186,所述传感器封装件可操作以用于采集与BHA 124、井筒102和/或地层106有关的测量数据。井下工具180、182、184中的一者或多者和/或BHA 124的另一个部分还可包括遥测装置187,所述遥测装置可操作以用于诸如通过泥浆脉冲遥测与地面装备110通信。井下工具180、182、184中的一者或多者和/或BHA 124的另一个部分还可包括井下处理装置188,所述井下处理装置可操作以用于接收、处理和/或存储从地面装备110、传感器封装件186和/或BHA 124的其他部分接收的信息。处理装置188还可存储可执行计算机程序(例如,程序代码指令),包括用于实现本文描述的操作的一个或多个方面。
支撑结构112可以支撑驱动器,例如顶驱116,所述驱动器可操作以(也许间接地)与输送装置122的井上端连接,并且将旋转运动117施加到钻柱120和钻头126。然而,代替顶驱116或除了顶驱116之外,可以利用诸如方钻杆和旋转台(均未示出)的另一个驱动器来施加旋转运动117。顶驱116和连接的钻柱120可通过起重装备从支撑结构112进行悬挂,所述起重装备可包括游动滑车118、天车(未示出)以及存储支撑缆线或线123的绞车(DW)119。天车可连接到支撑结构112或以其他方式由支撑结构112支撑,并且游动滑车118可诸如通过吊钩与顶驱116联接。DW 119可安装在钻台114上或以其他方式由钻台114支撑。天车和游动滑车118包括滑轮或绳轮,支撑线123围绕所述滑轮或绳轮穿过,以操作地连接天车、游动滑车118和DW 119(并且可能是锚)。DW 119可因此选择性地向支撑线123施加张力以提升和降低顶驱116,从而导致竖直运动135。DW 119可包括卷筒、框架和原动机(例如,发动机或马达)(未示出),所述原动机可操作以驱动卷筒旋转并卷起支撑线123,从而致使游动滑车118和顶驱116向上移动。DW 119还可操作以通过卷筒的受控旋转来卷出支撑线123,从而致使游动滑车118和顶驱116向下移动。
顶驱116可包括抓取器、转环(均未示出)、以吊卡129终止的管件操纵组件吊环127以及诸如通过齿轮箱或变速器(未示出)与原动机(未示出)操作地连接的驱动轴125。钻柱120可在钻柱120与驱动轴125之间具有或不具有保护接头的情况下机械地联接到驱动轴125。顶驱116的原动机可选择性地操作以旋转驱动轴125和与驱动轴125联接的钻柱120。因此,顶驱116和DW 119协作以将钻柱120推进到地层106中以形成井筒102。顶驱116的管件操纵组件吊环127和吊卡129可操纵未机械地联接到驱动轴125的管件(例如,钻管、钻铤、套管接头等)。例如,当将钻柱120下钻到井筒102中或将所述钻柱从所述井筒起钻时,吊卡129可抓紧钻柱120的管件,使得管件可通过机械联接到顶驱116的起重装备升高和/或降低。抓取器可包括在上紧和/或卸开管件与驱动轴125的连接时夹紧到管件上的夹具。顶驱116可具有引导系统(未示出),诸如沿支撑结构112上的导轨上下移动的辊子。引导系统可有助于使顶驱116与井筒102对准,并且通过将反作用扭矩传递到支撑结构112来防止顶驱116在钻井期间旋转。
井施工系统100可还包括用于维持井压控制的井控制系统。例如,钻柱120可通过各种防喷器(BOP)装备在井筒102内输送,所述防喷器(BOP)装备在井筒102的顶部上并且可能在钻台114下方设置在井场地面104处。BOP装备可操作以通过井筒102与井场地面104之间的一系列压力屏障(例如,闸板)来控制井筒102内的压力。BOP装备可包括BOP堆叠130、环形防喷器132和/或安装在环形防喷器132上方的旋转控制装置(RCD)138。BOP装备130、132、138可安装在井口134的顶部上。井控制系统还可包括与BOP装备130、132、138操作地连接并且可操作以致动、驱动、操作或以其他方式控制BOP装备130、132、138的BOP控制单元137(即,BOP关闭单元)。BOP控制单元137可以是或包括液压流体动力单元,该液压流体动力单元与BOP装备130、132、138流体连接,并且可选择性地操作以液压驱动BOP装备130、132、138的各个部分(例如,闸板、阀、密封件)。
井施工系统100可还包括钻井液循环系统,所述钻井液循环系统可操作以使流体在钻井和其他操作期间在地面装备110与钻头126之间循环。例如,钻井液循环系统可操作以通过纵向延伸穿过钻柱120的内部流体通道121将钻井液从井场地面104注入到井筒102中。钻井液循环系统可包括凹坑、罐和/或保持钻井液(即泥浆)140的其他流体容器142以及泵144,所述泵可操作以通过从泵144延伸到顶驱116的流体导管146和延伸穿过顶驱116的内部通道将钻井液140从容器142移动到钻柱120的流体通道121中。流体导管146可包括与顶驱116的流体入口连接的泵排放管线、立管、旋转软管和鹅颈管(未示出)中的一者或多者。泵144和容器142可通过诸如吸入管线的流体导管148流体连接。
在钻井操作期间,如由指向箭头158所指示的,钻井液可继续通过钻柱120的内部通道121向井下流动。钻井液可通过钻头126中的端口128离开BHA 124,并且然后通过井筒102的限定在钻柱120的外部与井筒102的壁之间的环形空间(环空)108向井上循环,这种流动在图1中由指向箭头159指示。以这种方式,钻井液使钻头126润滑并且将地层岩屑向井上携载到井场地面104。返回的钻井液可通过钟形导向短节139、RCD 138和/或位于BOP堆叠130的一个或多个部分下方的端口适配器136(例如,滑阀、翼阀等)离开环空108。
通过钟形导向短节139离开环空108的钻井液可穿过流体导管145(例如,重力回流管线)被引向钻井液重调装备170,以进行净化和/或重调,如下文所描述的,然后返回到容器142进行再循环。通过RCD 138离开环空108的钻井液可被引导到流体导管160(例如,钻井压力控制管线)中,并且可穿过沿着导管160流体地连接的各种井场装备,然后返回到容器142进行再循环。例如,钻井液可穿过节流歧管162(例如,钻井压力控制节流歧管),并且然后通过钻井液重调装备170。节流歧管162可包括至少一个节流阀和多个流体阀(均未示出),其可共同操作以控制通过和离开节流歧管162的流量。通过可变地限制流动通过节流歧管162的钻井液或其他流体的流量,可将背压施加到环空108。对通过节流歧管162的流量的限制越大,施加到环空108的背压就越大。通过端口适配器136离开环空108的钻井液可被引导到流体导管171(例如,钻机节流管线)中,并且可穿过沿着导管171流体连接的各种装备,然后返回到容器142进行再循环。例如,钻井液可穿过节流歧管173(例如,钻机节流歧管、井控制节流歧管等),并且然后通过钻井液重调装备170。节流歧管173可包括至少一个节流阀和多个流体阀(均未示出),其可共同操作以控制通过节流歧管173的流量。通过可变地限制流动通过节流歧管173的钻井液或其他流体的流量,可将背压施加到环空108。
在返回到容器142之前,可通过钻井液重调装备170对返回到井场地面104的钻井液进行净化和/或重调,所述钻井液重调装备可包括液态气体分离器、泥浆振动筛、离心机和其他钻井液净化装备中的一者或多者。液态气体分离器可去除夹带在从井筒102排出的钻井液中的地层气体,并且泥浆振动筛可从钻井液中分离并去除固体颗粒141(例如,钻屑)。钻井液重调装备170还可包括可操作以从钻井液中去除另外的气体和较细的地层岩屑和/或修改钻井液的物理特性或特征(例如,流变特性)的装备。例如,钻井液重调装备170除其他实例之外可包括脱气器、除砂器、除泥器、泥浆清洗器和/或滗析器。中间罐/容器(未示出)可在钻井液前进通过钻井液重调装备170的各个级或部分时被用来保持钻井液。经净化/重调的钻井液可被传送到流体容器142,从钻井液中去除的固体颗粒141可被传送到固体容器143(例如,储备凹坑),并且去除的气体可通过导管174(例如,火炬管线)传送到火炬烟囱172以进行燃烧或传送到容器(未显示)以用于存储并从井场去除。
地面装备110可以包括管件操纵装备,所述管件操纵装备可操作以存储、移动、连接和断开管件(例如,钻管),以在钻井操作期间组装和拆卸钻柱120的输送装置122。例如,猫道131可用于将管件从诸如沿着井场地面104的地平面输送到钻台114,从而允许管件操纵组件吊环127抓取管件并将所述管件提升到井筒102的上方以与先前部署的管件进行连接。猫道131可具有水平部分147和坡道或倾斜部分149,其中倾斜部分在水平部分与钻台114之间延伸。猫道131可包括可沿着沟槽(未示出)移动的滑块133,所述沟槽沿着猫道131的水平部分和倾斜部分纵向延伸。滑块133可操作以将管件沿着猫道131输送(例如,推动)到钻台114。滑块133可以由诸如滑轮系统或液压系统的驱动系统(未示出)沿着沟槽驱动。另外,一个或多个架子(未示出)可邻接猫道131的水平部分。架子可以是进料台(未显示),诸如可具有旋扣器单元和/或用于将管件传送到猫道131的沟槽的其他装置。
铁钻工(RN)151可位于钻台114上。RN 151可包括扭矩部分153,例如可包括旋扣器和包括下钳和上钳的扭矩扳手。RN 151的扭矩部分153可朝向并且至少部分地围绕钻柱120移动,诸如可允许RN 151上紧和卸开钻柱120的连接。扭矩部分153也可移动远离钻柱120,诸如可允许RN 151在钻井操作期间移动离开钻柱120。RN 151的旋扣器可用于施加低扭矩,以上紧和卸开钻柱120的管件之间的螺纹连接,并且扭矩扳手可用于施加较高扭矩以拧紧和松开螺纹连接。系统100可包括RN 151的多于一个的实例。
往复运动的卡瓦161可位于钻台114上,诸如可在上扣和卸扣操作期间以及在钻井操作期间容纳穿过其中的井下管件。往复运动的卡瓦161可在钻井操作期间处于打开位置以允许钻柱120穿过其中推进,并且可处于闭合位置以夹紧在输送装置122(例如,组装的管件)的上端附近,从而诸如在上扣和卸扣操作期间将钻柱120悬挂在井筒102内并且防止钻柱120在井筒102内推进。
在钻井操作期间,起重装备降低钻柱120,同时顶驱116旋转钻柱120,以使钻柱120在井筒102内推进并进入地层106中。在钻柱120推进期间,往复运动的卡瓦161处于打开位置,并且RN 151移动远离钻柱120或以其他方式离开所述钻柱。当上扣到驱动轴125的钻柱120中的管件的上部部分靠近往复运动的卡瓦161和/或钻台114时,顶驱116停止旋转,并且往复运动的卡瓦161闭合以夹紧上扣到驱动轴125的管件。然后,顶驱116的抓取器夹紧上扣到驱动轴125的管件的上部部分,并且驱动轴125沿着与钻井旋转相反的方向旋转,以卸开驱动轴125与上扣的管件之间的连接。然后,顶驱116的抓取器可释放钻柱120的管件。
可将多个管件装载在猫道131的架子上,并且可将各个管件从架子传送到猫道131中的沟槽。定位在沟槽中的管件可由滑块133沿着沟槽输送,直到管件的端部突出到钻台114的上方。然后,顶驱116的吊卡129可抓紧突出的端部,并且操作DW 119以提升顶驱116、吊卡129和新的管件。
然后,起重装备升高顶驱116、吊卡129和管件,直到管件与由卡瓦161夹紧的钻柱120的上部部分对准。RN 151朝向钻柱120移动,并且扭矩部分153的下钳夹紧到钻柱120的上部部分上。旋扣系统将新的管件旋转到钻柱120的上部部分中。上钳然后夹紧到新的管件上并且以高扭矩旋转以完成上紧与钻柱120的连接。以这种方式,新的管件成为钻柱120的一部分。然后,RN 151释放并移动离开钻柱120。
然后,顶驱116的抓取器可夹紧到钻柱120上。使驱动轴125(或从驱动轴125延伸的保护接头或其他装置)与钻柱120接触并旋转,以上紧钻柱120与驱动轴125之间的连接。然后,抓取器释放钻柱120,并且往复运动的卡瓦161移动到打开位置。然后可恢复钻井操作。
管件操纵装备还可包括管操纵机械手(PHM)163,所述管操纵机械手与用于存储管件111的竖直管架165(或者两个或三个管件的立根)关联地设置。竖直管架165可包括或支撑限定多个狭槽的指梁(FIB)166,所述多个狭槽被配置为将管件111支撑或以其他方式保持在立根盒164(例如,平台或另一个区域)之内或之上,所述立根盒邻近、沿着钻台114定位或者定位在所述钻台的下方。FIB 166可包括多个指状物(未示出),每个指状物与对应的狭槽相关联并且可操作以围绕各个管件111闭合和/或以其他方式将所述各个管件插入其间,以将管件111保持在立根盒164的对应的狭槽内。竖直管架165可与支撑结构112或井场系统100的另一个部分连接并由其支撑。FIB 166/立根盒164在各种操作期间(诸如在钻柱120的起钻与下钻期间以及之间)提供管件111的存储(例如,临时存储)。PHM 163可操作以在FIB166/立根盒164与钻柱120之间(即,悬挂的钻柱120上方的空间)传送管件111。例如,PHM163可包括臂167,所述臂终止于诸如可操作以抓紧和/夹紧到管件111中的一个上的夹具169。PHM 163的臂167可延伸和回缩,并且/或者PHM 163的至少一部分可能够朝向和远离钻柱120旋转和/或移动,诸如可允许PHM 163在FIB 166/立根盒164与钻柱120之间传送管件111。
井施工系统100的地面装备110还可包括控制中心190,通过所述控制中心,可监测并控制井施工系统100的各个部分,诸如顶驱116、起重系统、管件操纵系统、钻井液循环系统、井控制系统和BHA 124等其他实例。控制中心190可位于钻台114上或井施工系统100的另一个位置(诸如井场地面104)。控制中心190可包括包含控制工作站197的设施191(例如,房间、舱室、拖车等),所述控制工作站可由人类井场操作员195操作以监测和控制井施工系统100的各种井场装备或部分。控制工作站197可包括处理装置192(例如,控制器、计算机等)或与之通信地连接,诸如可操作以接收、处理和输出信息,从而监测和/或控制井施工系统100的一个或多个部分的操作。例如,处理装置192可与本文所述的各种地面和井下装备通信地连接,并且可操作以从这种装备接收信号或向所述装备发射信号以执行本文所述的各种操作。处理装置192可存储可执行程序代码、指令和/或操作参数或设定点,包括用于实现本文所述方法和操作的一个或多个方面。处理装置192可位于设施191之内和/或之外。
控制工作站197可能够操作以用于通过井场操作员195将控制命令输入或以其他方式传达到处理装置192,并且用于将信息从处理装置192显示或以其他方式传达到井场操作员195。控制工作站197可包括多个人机接口(HMI)装置,所述多个人机接口装置包括一个或多个输入装置194(例如,键盘、鼠标、操纵杆、触摸屏等)和一个或多个输出装置196(例如,视频监视器、触摸屏、打印机、音频扬声器等)。处理装置192、输入装置194和输出装置196与各种井场装备之间的通信可通过有线通信装置和/或无线通信装置进行。然而,为了清楚和易于理解,未描绘这类通信装置,并且本领域普通技术人员将理解,这类通信装置在本公开的范围内。
本公开范围内的井施工系统可包括比如上文所描述和图1所描绘的更多或更少的部件。另外,图1所示的油井施工系统100的各种装备和/或子系统可包括比如上文所描述和图1所描绘的更多或更少的部件。例如,各种发动机、马达、液压装置、致动器、阀和/或本文未明确描述的其他部件可包括在井施工系统100中并且在本公开的范围内。
图2是井场系统200的示例性实现方式的示意图,所述井场系统包括多个管操纵装备,每个管操纵装备包括或携载一个或多个传感器,所述一个或多个传感器可操作以生成指示这类装备的对应的操作参数(例如,位置、速度、加速度等)的传感器测量值。根据本公开的一个或多个方面,井场系统200的各个装备件可操作以使管件111在井场系统200的各个位置之间移动,以执行本文所述的过程,所述过程包括钻柱120的组装和拆卸。井场系统200可形成图1所示的井施工系统100的一部分和/或可结合图1所示的井施工系统100进行操作,包括由相同数字指示的地方。因此,以下描述共同参考图1和图2。
井场系统200可包括支撑结构112,所述支撑结构支撑可操作以在井场系统200的不同区域之间运输管件111(例如,钻管、钻管的立根、套管接头)的各种自动管操纵装备。井场系统200可还包括猫道131,所述猫道可操作以将管件111从地平面(例如,井场地面104)处的存储区域(未示出)运输到钻台114。
支撑结构112或井场系统200的另一个部分可支撑管件递送臂(TDA)202,所述管件递送臂可操作以一次一个地从FIB 166和/或猫道131抓取管件111,并且将管件111提升或以其他方式移动到预定位置。例如,TDA 202可使管件111在井筒102上方移动,使得管件111在往复运动的卡瓦161和位于钻台114下方的流体控制装备213(例如,安装在井口134的顶部上的BOP装备130、132、138等)的上方与井筒中心203对准。TDA 202还可以使管件111在鼠洞(MOH)204上方移动,使得管件111与鼠洞中心205对准,从而允许一个或多个管件111设置在其中,使得两个或更多个管件111可联接在一起形成立根。
TDA 202还可将管件111移动到丝扣油涂抹台或区域206,使得管件111可通过清洗器/丝扣油涂抹器装置(丝扣油涂抹器)209准备进行上扣操作。例如,丝扣油涂抹器209可将丝扣油施涂到管件111的公扣端以准备进行上扣,并且/或者可在传送到FIB 166/立根盒164之前清洗管件111的公扣端。因此,丝扣油涂抹器209可结合丝扣油涂抹区域206、MOH204和/或其他区域进行定位,诸如以用于在管件111被TDA 202接合时对管件111执行清洗/丝扣油涂抹操作。丝扣油涂抹器209也可结合TDA 202进行定位。
TDA 202的部分可操作以水平地和/或竖直地移动,如由箭头208所指示的,诸如可允许TDA 202的抓取器或夹具210抓取或以其他方式接收通过猫道131传送到钻台114的管件111。DW 119可操作以使TDA 202沿着支撑结构112竖直地移动,如由箭头212所指示的。DW119可通过在TDA 202与DW 119的卷筒216之间延伸的支撑线214与TDA 202操作地连接。
一个或多个传感器211可与夹具210关联地设置,诸如可允许传感器211生成指示由夹具210接收的管件111的存在或接近度的传感器信号。一个或多个传感器218可与DW119关联地设置,诸如可允许传感器218生成指示卷筒216的旋转位置的传感器测量值(例如,电传感器信号或数据)。这类传感器测量值可还指示TDA 202沿着支撑结构112的竖直位置。TDA 202可携载或包括一个或多个传感器220,所述传感器可操作以生成指示施加到TDA202的张力以及因此由TDA 202支撑的重量的传感器测量值。支撑结构112可还支撑多个传感器226,每个传感器沿着支撑结构112位于预定的或其他已知的参考位置221-224(即,高度)处。这类已知参考位置221-224在石油和天然气工业中可称为标志或目标。每个传感器226可操作以在TDA 202经过传感器226时生成指示TDA 202的存在或接近度的传感器信号,从而在这类时间指示TDA 202的对应的已知位置221-224。
支撑结构112或井场系统200的另一个部分可还支撑下部稳定臂(LSA)228,所述下部稳定臂可操作以通过保持装置230接收(例如,卡扣)管件111并使其稳定,所述管件在管件111从猫道131提升之后由TDA 202支撑并且朝向支撑结构112摆动。然后,LSA 228可枢转231以水平地移动233管件111,以使管件111与鼠洞中心205或丝扣油涂抹区域206对准。保持装置230可(至少部分地)围绕管件111延伸以诸如在上扣操作之前的扶正期间提供另外的稳定性。LSA 228可携载或包括一个或多个传感器232,所述一个或多个传感器可操作以生成指示稳定臂延伸部分(即,长度)和/或LSA 228与支撑结构112或参考平面之间的角度234的传感器测量值。
支撑结构112或井场系统200的另一个部分可以支撑包括或支撑FIB 166的竖直架165,所述FIB限定多个狭槽,所述多个狭槽被配置为将管件111支撑或以其他方式保持在立根盒164之内或之上,所述立根盒邻近、沿着钻台114定位或者定位在所述钻台的下方。支撑结构112、竖直架165或井场系统200的另一个部分(诸如PHM 163)可支撑上部管件约束件(UTC)242和下部管件约束件(LTC)244,每个管件约束件可操作以通过对应的抓取器或夹具246、248抓取管件111的对应的上部部分和下部部分。UTC 242和LTC 244可使管件111稳定和/或水平地移动管件111的对应的上部部分和/或下部部分(如由箭头247、249所指示的),以使管件111与鼠洞中心205或丝扣油涂抹区域206对准。UTC 242和LTC 244也可水平地移动管件111的对应的上部部分和/或下部部分(如由箭头247、249所指示的),以沿着管件移送位置(THP)207定位管件111,在所述位置处,TDA 202可抓取管件111并将其与井筒中心203对准以用于与钻柱120连接,或者使管件111与猫道131的一部分对准,从而允许将管件111下降到猫道131上,然后所述猫道将管件111从钻台114移动到地平面(例如,井场地面104)。THP 207可与丝扣油涂抹区域206水平地对准,诸如可允许管件111在TDA 202使管件沿着井筒中心203对准以用于与钻柱120连接或者将管件111定位成通过猫道131降低之前通过丝扣油涂抹器209进行丝扣油涂抹和/或清洗。UTC 242和LTC 244可各自携载或包括一个或多个对应的传感器250、252,所述传感器可操作以生成指示对应的夹具246、248的延伸或水平位置247、249的传感器测量值。
支撑结构112、竖直架165或井场系统200的另一个部分可还支撑中间管件约束件(ITC)236,所述中间管件约束件236可操作以通过抓取器或夹具238抓取由TDA 202支撑的管件111,使管件111稳定和/或水平地移动235管件111以使管件111与鼠洞中心205或丝扣油涂抹区域206对准。ITC 236可携载或包括一个或多个传感器240,所述一个或多个传感器可操作以生成指示夹具238的延伸或水平位置235的传感器测量值。
支撑结构112、竖直架165或井场系统200的另一个部分可还支撑转移桥排管器(TBR)254和立根盒引导臂(SGA)262,它们可共同操作以将竖直架165的FIB 166中的管件111存储(例如,悬挂、上架)在立根盒164之内或之上。例如,TBR 254可能够操作以通过抓取器或夹具256抓取管件111的上部部分并且使管件111在FIB 166与THP 207之间水平地和/或竖直地移动,如由箭头258所指示的。TBR 254可携载或包括一个或多个对应的传感器260,所述传感器可操作以生成指示夹具256的水平和/或竖直位置258的传感器测量值。SGA262可能够操作以通过抓取器或夹具264抓取管件111的下部部分,并且在立根盒164与THP207之间水平地和/或竖直地引导管件111的下部部分,如由箭头266所指示的,与TBR 254一致(即同步)。SGA 262可携载或包括一个或多个对应的传感器268,所述传感器可操作以生成指示夹具264的水平和/或竖直位置266的传感器测量值。当管件111与THP 207对准时,TDA 202可抓取管件111并将其与井筒中心203对准以用于与钻柱120连接,或者使管件与猫道131的一部分对准,从而允许管件111被下降到猫道131上。
UTC 242、ITC 236和LTC 244可诸如在TBR 254、SGA 262和TDA 202正在执行其他操作时临时抓紧THP 207中的管件111。UTC 242、ITC 236和LTC 244中的一者或多者也可能够延伸以抓紧MOH 204中的管件111(或将管件111移动到MOH 204)。例如,管件111在等待添加到钻柱120或等待传送到THP 207和/或FIB 166/立根盒164时可临时存储在MOH 204中。
猫道131可包括可沿着沟槽(未示出)移动的滑块133,所述沟槽沿着猫道131纵向延伸。滑块133可由驱动系统270沿着沟槽驱动,所述驱动系统诸如包括由马达(未示出)驱动的卷轴272的绞盘系统。驱动系统270可选择性地可操作以通过在卷轴272与滑块133之间延伸的线274沿着猫道131在相反方向上拉动滑块133。由驱动系统270致动,滑块133可操作以将管件111沿着猫道131输送(例如推动)到钻台114。滑块133可使管件111的母扣端移动到TDA 202的夹具210中,使得管件111可由TDA 202提升。驱动系统270可携载或包括一个或多个对应的传感器276,所述传感器可操作以生成指示卷轴272的旋转位置以及因此指示滑块133沿着猫道131的位置的传感器测量值。
传感器218、276可以是或包括例如编码器、旋转电位计和/或旋转可变差动变压器(RVDT)。传感器220可以是或包括例如应变仪和/或负荷传感器。传感器211、226可以是或包括例如接近传感器和霍尔效应传感器。传感器232、240、250、252、260、268可以是或包括例如编码器、旋转电位计、线性电位计或旋转可变差动变压器(RVDT)。
本公开还提供了用于控制井施工系统100和井场系统200的一个或多个部分的系统和/或方法的各种实现方式。因为井场系统200可形成井施工系统100的一部分和/或结合井施工系统100进行操作,所以在下文中将井施工系统100和井场系统200统称为井施工系统100、200。图3是根据本公开的一个或多个方面的用于监测和控制井施工系统100、200的各种装备、部分和子系统的监测和控制系统300的示例性实现方式的至少一部分的示意图。以下描述共同参考图1至图3。
控制系统300可与井施工系统100、200实时通信,并且可用于监测和/或控制井施工系统100、200的各个部分、部件和装备。井施工系统100、200的装备可被分组成若干子系统,每个子系统可操作以执行对应的操作和/或本文所述的井施工操作的一部分。子系统除其他实例之外可包括钻机控制(RC)系统311、流体循环(FC)系统312、受控压力钻井控制(MPDC)系统313、节流压力控制(CPC)系统314、井压控制(WC)系统315和闭路电视(CCTV)系统316。控制工作站197可用于监测、配置、控制和/或以其他方式操作井施工子系统311-316中的一者或多者。
RC系统311可包括支撑结构112、钻柱起重系统或装备(例如,DW 119)、钻柱旋转系统(例如,顶驱116和/或旋转台和方钻杆)、往复运动的卡瓦161、钻管操纵系统或装备(例如,猫道131、TDA 202、立根盒164、FIB 166、TBR 254、SGA 262、LTC 244、ITC 236、UTC 242、LSA 228和RN 151)、发电机和其他装备。因此,RC系统311可执行发电和/或配电,并且可控制钻管的操纵、起重和旋转操作。RC系统311还可充当钻井装备的支撑平台和用于钻机操作(诸如,上述的连接上紧和卸开操作)的紧脚手架工作平台。
FC系统312可包括钻井液140、泵144、钻井液装载和/或混合装备、钻井液重调装备170、火炬烟囱172和/或其他流体控制装备。因此,FC系统312可执行井施工系统100的流体操作。
MPDC系统313可包括RCD 138、节流歧管162、井下压力传感器186和/或其他装备。CPC系统314可包括节流歧管173和/或其他装备。WC系统315可包括BOP装备130、132、138,BOP控制单元137以及用于控制BOP控制单元137的BOP控制站(未示出)。
CCTV系统316可包括摄像机198和用于移动或以其他方式控制摄像机198的方向的对应的致动器(例如,马达)。CCTV系统316可用于捕获井施工系统100的各个部分或子系统311-315的实时视频,并且在视频输出装置196上显示来自摄像机198的视频信号以实时显示各个部分或子系统311-315。
井施工子系统311-316中的每一者可还包括各种通信装备(例如,调制解调器、网络接口卡/电路等)和通信导体(例如,电缆),它们通信地连接每个子系统311-316的装备(例如,传感器和致动器)与控制工作站197和/或其他装备。尽管上文列出并在图1和图2中示出的井场装备与某些井场子系统311-316相关联,但是这种关联仅仅是实例,所述实例并不旨在限制或防止这种井场装备与两个或更多个井场子系统311-316和/或不同的井场子系统311-316相关联。
控制系统300可包括井场计算资源环境305,所述井场计算资源环境可位于井场104处,作为井施工系统100、200的一部分。控制系统300还可包括远程计算资源环境306,所述远程计算资源环境可不在现场(即,不在井场104处)。控制系统300还可包括与井施工系统100、200的子系统311-316和/或各个部件或装备相关联的各种本地控制器(例如,图4所示的控制器341-346)。如上所述,井施工系统100、200的每个子系统311-316可包括用于执行井施工系统100、200的操作的致动器(例如,图4所示的致动器331-336)和传感器(例如,图4所示的传感器321-326)。这些致动器和传感器可通过井场计算资源环境305、远程计算资源环境306和/或对应的本地控制器监测和/或控制。例如,井场计算资源环境305和/或本地控制器可操作以实时监测井场子系统311-316的传感器,并且基于所接收的传感器数据向子系统311-316提供实时控制命令。数据可通过传感器和/或计算生成并且可用于子系统311-316中的两个或更多个之间的协调控制。
控制系统300可与井施工系统100、200的各个部件实时通信。例如,本地控制器可通过本地通信网络(未示出)与对应的子系统311-316的各个传感器和致动器通信,并且井场计算资源环境305可通过数据总线或网络309与子系统311-316通信。如下所述,由子系统311-316的传感器生成的数据或传感器信号可供井场计算资源环境305的过程(例如,图4所示的过程374、375)和/或装置使用。类似地,井场计算资源环境305的过程和/或装置生成的数据或控制信号可自动地传达到子系统311-316的各个致动器,也许是根据预定的编程,诸如以促进井施工操作和/或本文所述的其他操作。
远程计算资源环境306、井场计算资源环境305以及井施工系统100、200的子系统311-316可通过网络连接(诸如通过广域网(WAN)、局域网(LAN)和/或同样在本公开范围内的其他网络)彼此通信地连接。“云”计算环境是远程计算资源环境306的一个实例。井场计算资源环境305可以是或形成处理装置192的至少一部分,并且因此可形成控制工作站197的一部分或与所述控制工作站通信地连接。
图4是与井施工系统100、200的子系统311-316通信地连接的图3所示的控制系统300的示例性实现方式的示意图,所述子系统包括RC系统311、FC系统312、MPDC系统313、CPC系统314、WC系统315和CCTV系统316。以下描述共同参考图1至图4。
井施工系统100、200可包括与井场计算资源环境305通信地连接的一个或多个现场用户装置(OUD)302。现场用户装置302可以是或包括旨在被安置在井施工系统100、200处的固定用户装置和/或便携式用户装置。例如,现场用户装置302可包括台式计算机、膝上型计算机、智能手机和/或其他便携式智能装置、个人数字助理(PDA)、平板/触摸屏计算机、可穿戴计算机和/或其他装置。现场用户装置302可操作以与井施工系统100、200的井场计算资源环境305和/或远程计算资源环境306通信。现场用户装置302中的至少一者可以是或包括图1所示的控制工作站197和/或图1和图3所示的处理装置192的至少一部分,其可位于设施191内。
井场计算资源环境305和/或井施工系统100、200的其他部分可还包括信息技术(IT)系统319,所述信息技术系统可操作以使井场计算资源环境305的各个部分通信地互连和/或通信地连接井场计算资源环境305与井施工系统100、200的其他部分。IT系统319可包括通信管道、软件、计算机和/或促进井场计算资源环境305的一个或多个部分之间和/或井场计算资源环境305与井施工系统100、200的另一个部分(诸如,远程计算资源环境306、现场用户装置302和子系统311-316)之间的通信的其他IT装备。
控制系统300可包括一个或多个非现场用户装置303(或以其他方式与之结合地使用)。非现场用户装置303可以是或包括台式计算机、膝上型计算机、智能手机和/或其他便携式智能装置、PDA、平板/触摸屏计算机、可穿戴计算机和/或其他装置。非现场用户装置303可操作以诸如凭借通过网络308与井场计算资源环境305进行通信来从和/或向井施工系统100、200接收和/或发射信息(例如,用于监测功能)。非现场用户装置303可仅用于监测功能。但是,非现场用户装置303中的一者或多者可用于提供用于控制井施工系统100、200的各个子系统311-316的操作的控制过程。非现场用户装置303和/或井场计算资源环境305还可能够操作以通过网络308与远程计算资源环境306进行通信。网络308可以是WAN,诸如互联网、蜂窝网络、卫星网络、其他WAN和/或它们的组合。
井施工系统100、200和控制系统300的子系统311-316可包括传感器321-326、致动器331-336和本地控制器341-346。控制器341-346可以是可编程逻辑控制器(PLC)和/或具有类似于图23所示的示例性处理装置1000的各方面的其他控制器。RC系统311可包括一个或多个传感器321、一个或多个致动器331和一个或多个控制器341。FC系统312可包括一个或多个传感器322、一个或多个致动器332和一个或多个控制器342。MPDC系统313可包括一个或多个传感器323、一个或多个致动器333和一个或多个控制器343。CPC系统314可包括一个或多个传感器324、一个或多个致动器334和一个或多个控制器344(例如,图6所示的BOP控制站470)。WC系统315可包括一个或多个传感器325、一个或多个致动器335和一个或多个控制器345。CCTV系统316可包括一个或多个传感器326、一个或多个致动器336和一个或多个控制器346。
传感器321-326可包括用于井施工系统100、200的各个子系统311-316的操作的传感器。例如,传感器321-326可包括相机、位置传感器、压力传感器、温度传感器、流量传感器、振动传感器、电流传感器、电压传感器、电阻传感器、手势检测传感器或装置、语音致动或识别装置或传感器和/或其他实例。
传感器321-326可能够操作以将传感器数据提供到井场计算资源环境305,诸如提供到协调控制装置304。例如,传感器321-326可分别提供传感器数据351-356。传感器数据351-356可包括指示装备操作状态(例如,导通或关断、向上或向下、设置或释放等)、钻井参数(例如,深度、吊钩负荷、扭矩等)、辅助参数(例如,泵的振动数据)、流量、温度、操作速度、位置和压力等其他实例的信号或信息。所采集的传感器数据351-356可包括指示何时采集了传感器数据351-356的时间戳(例如,日期和/或时间)或与所述时间戳相关联。传感器数据351-356可同样或替代地与深度、时间和/或其他钻井参数对准。
在协调控制装置304处采集传感器数据351-356可促进井施工系统100、200的不同位置处的相同物理特性的测量,其中传感器数据351-356可用于测量冗余以允许连续井施工操作。不同位置处的相同物理特性的测量也可用于检测井场地面104处或井筒102内的不同物理位置之中的装备状况。不同井场位置处的测量随时间推移的变化可用于确定装备性能、系统性能、预定维修到期日等。例如,可从传感器321采集卡瓦状态(例如,已设置或未设置),并且将所述卡瓦状态传达到井场计算资源环境305。流体样本的采集可由诸如传感器186、323的传感器测量,并且与由其他传感器测量的钻头深度和时间有关。从摄像机198、325采集数据可促进材料或装备在井施工系统100、200处的到达和/或安装的检测。材料或设备的到达和/或安装时间可用于评估材料的降解、装备的预定维修和其他评估。
协调控制装置304可促进子系统311-316中的一者或多者在每个单独子系统311-316的级别上的控制。例如,在FC系统312中,传感器数据352可馈送到控制器342中,所述控制器可做出响应以控制致动器332。然而,对于涉及多个系统的控制操作,可通过协调控制装置304来协调控制。例如,协调控制操作可包括起下钻期间的井下压力控制。井下压力可能受到FC系统312(例如,泵速)、MPDC 313(例如,MPDC的节流位置)和RC系统311(例如,起下钻速度)中的每一者的影响。因此,当旨在在起下钻期间维持一定的井下压力时,可利用协调控制装置304将适当的控制命令引导到参与的子系统中的两者或更多者(或每一者)。
可通过三层控制系统来提供井施工系统100、200的子系统311-316的控制,所述三层控制系统包括第一层本地控制器341-346、第二层协调控制装置304和第三层监控系统307。协调控制也可在不使用协调控制装置304的情况下由子系统311-316中的一者或多者的一个或多个控制器341-346提供。在控制系统300的这种实现方式中,井场计算资源环境305可直接向这些控制器341-346提供控制过程以进行协调控制。
传感器数据351-356可由协调控制装置304接收,并且用于子系统311-316的控制。可对传感器数据351-356进行加密以产生加密的传感器数据371。例如,井场计算资源环境305可对来自不同类型的传感器和系统的传感器数据进行加密,以产生一组加密的传感器数据371。因此,如果未经授权的用户装置(任一非现场用户装置303或现场用户装置302)能够访问井施工系统100、200的一个或多个网络,则这种装置可能无法查看加密的传感器数据371。如上所述,加密的传感器数据371可包括时间戳和对准的钻井参数(例如,深度)。加密的传感器数据371可通过网络308传达到远程计算资源环境306,并且被存储为加密的传感器数据372。
井场计算资源环境305可提供加密的传感器数据371、372,所述加密的传感器数据可用于诸如通过非现场用户装置303进行的非现场查看和处理。可通过在井场计算资源环境305中实现的访问控制来限制对加密的传感器数据371、372的访问。可将加密的传感器数据371、372实时地提供到非现场用户装置303,使得非现场人员可查看井施工系统100、200的实时状态并基于实时传感器数据提供反馈。例如,可将加密的传感器数据371、372的不同部分发送到非现场用户装置303。加密的传感器数据371、372可在发射之前由井场计算资源环境305解密,并且/或者在接收到加密的传感器数据之后在非现场用户装置303上解密。非现场用户装置303可包括瘦客户端(未示出),其被配置为显示从井场计算资源环境305和/或远程计算资源环境306接收的数据。例如,多种类型的瘦客户端(例如,具有显示能力和最小处理能力的装置)可用于某些功能或用于查看各种传感器数据351-356。
井场计算资源环境305可包括用于监测和控制操作的各种计算资源,诸如具有处理器和存储器的一个或多个计算机。例如,协调控制装置304可包括具有处理器和存储器的处理装置(例如,图23所示的处理装置1000),其用于处理传感器数据、存储传感器数据以及响应于传感器数据发出控制命令。如上所述,协调控制装置304可通过对来自井场子系统311-316中的一者或多者的传感器数据351-356进行分析以促进子系统311-316之间的协调控制来控制子系统311-316的各个操作。协调控制装置304可生成控制数据373(例如,信号、命令、编码指令)以执行子系统311-316的控制。协调控制装置304可将控制数据373发射到一个或多个子系统311-316。例如,可将控制数据361发送到RC系统311,可将控制数据362发送到FC系统312,可将控制数据363发送到MPDC系统313,可将控制数据364发送到CPC系统314,可将控制数据365发送到WC系统315,并且可将控制数据366发送到CCTV系统316。控制数据361-366可包括例如井场操作员命令(例如,开启或关闭泵、导通或关断阀、更新物理特性设定点等)。协调控制装置304可包括快速控制回路,所述快速控制回路直接获得传感器数据351-356并执行例如控制算法。协调控制装置304可包括缓慢控制回路,所述缓慢控制回路通过井场计算资源环境305获得数据以生成控制命令。
协调控制装置304可在监控系统307与子系统311-316的本地控制器341-346之间的中间位置,诸如可允许监控系统307控制子系统311-316。监控系统307可包括例如用于输入控制命令以执行子系统311-316的操作的装置。协调控制装置304可从监控系统307接收命令,根据规则(例如,基于用于钻井操作的物理定律的算法)处理这类命令,并且向一个或多个子系统311-316提供控制数据。监控系统307可由井场操作员195和/或过程监测和控制程序提供。在这类实现方式中,协调控制装置304可在离散监控系统与子系统311-316之间协调控制,同时利用可基于从子系统311-316接收并且通过井场计算资源环境305分析的传感器数据351-356生成的控制数据361-366。协调控制装置304可接收控制数据351-356,并且然后将包括互锁命令的控制数据361分派到每个子系统311-316。协调控制装置304可同样或替代地仅监测正分派到每个子系统321-326的控制数据351-356,并且然后向相关的本地控制器341-346发起机器互锁命令。
协调控制装置304可以不同的自主水平运行。例如,协调控制装置304可在建议模式下操作以通知井场操作员195基于从各个子系统311-316接收到的传感器数据351-356来执行具体任务或采取具体校正动作。当处于建议模式时,协调控制装置304可例如建议或指示井场操作员195当在钻台114上检测到气体时执行标准的工作顺序,诸如以关闭环形BOP132。此外,如果井筒102正在增加或损失钻井液140,则协调控制装置304可例如建议或指示井场操作员195修改钻井液140的密度,修改钻井液140的泵送速率和/或修改井筒102内的钻井液的压力。
协调控制装置304也可在系统/装备互锁模式下操作,由此基于所接收的传感器数据351-356防止某些操作或操作顺序。当在互锁模式下操作时,协调控制装置304可管理子系统311-316的各种装备之间的互锁操作。例如,如果激活了BOP堆叠130的管闸板,则协调控制装置304可向RC系统控制器341发出互锁命令以使DW 119停止使钻柱120移动。然而,如果激活了BOP堆叠130的剪切闸板,则协调控制装置304可在激活剪切闸板之前向控制器341发出互锁命令以操作DW 119来调整钻柱120在BOP堆叠130内的位置,使得剪切闸板不与形成钻柱120的管件的肩部对准。
协调控制装置304还可在自动顺序模式下操作,由此基于所接收的传感器数据351-356自动执行某些操作或操作顺序。例如,协调控制装置304可自动激活警报,并且/或者当在移动的RN 151、TDA 202、LSA 228、LTC 244或猫道131附近检测到井场操作员195时使管操纵装备停止或降低管操纵装备的操作速度。作为另一个实例,如果井筒压力迅速增加,则协调控制装置304可自动关闭环形BOP 132,关闭BOP堆叠130的一个或多个闸板和/或调整节流歧管162。
井场计算资源环境305可包括或执行监测过程374(例如,事件检测过程),所述监测过程可利用传感器数据351-356来确定关于井施工系统100、200的状态的信息并自动发起子系统311-316中的一者或多者的操作动作、过程和/或顺序。监测过程374可发起有待由协调控制装置304引起的操作动作。根据所接收的传感器数据351-356的类型和范围,可在建议模式、互锁模式或自动顺序模式下执行操作动作。
例如,监测过程374可确定钻井状态、装备健康状况、系统健康状况、维修计划或它们的组合,并且发起要生成的建议。监测过程374还可基于工作设计和执行参数(例如,井筒、钻井液和钻柱参数)、当前钻井状态以及来自地面装备110的实时传感器信息(例如,在钻台处存在危险气体、紧靠移动的管操纵装备存在井场操作员等)和来自BHA 124的实时传感器信息来检测异常钻井事件(诸如井筒流体损失和增益、井筒冲蚀、流体质量问题或装备事件),以在自动模式下发起操作动作。监测过程374可连接到实时通信网络309。协调控制装置304可基于由监测过程374检测到的事件来发起反制措施(例如,预定动作、过程或操作)。
本文使用的术语“事件”可包括但不限于本文所述的操作和/或安全相关事件和/或可在井施工系统100、200处发生的另一个操作和安全相关事件。本文所述的事件可由监测过程374基于由监测过程374接收和分析的传感器数据351-356(例如,传感器信号或信息)来检测。
井场计算资源环境305还可包括或执行控制过程375,所述控制过程可利用传感器数据351-356来优化钻井操作,诸如钻井装备的用于提高钻井效率、装备可靠性等的控制。例如,所采集的传感器数据352可用于导出噪声消除方案以改进电磁和/或泥浆脉冲遥测信号处理。远程计算资源环境306可包括或执行与可提供到井场计算资源环境305的控制过程375基本上类似的控制过程376。监测和控制过程374、375、376可通过例如控制算法、计算机程序、固件或其他硬件和/或软件来实现。
井场计算资源环境305可包括各种计算资源,诸如单个计算机或多个计算机。井场计算资源环境305还可包括虚拟计算机系统和虚拟数据库或用于所收集的数据的其他虚拟结构,诸如可包括促进通过请求向各种资源提交应用编程接口(API)调用的一个或多个资源接口(例如,网络接口)。另外,所述资源中的每一者可包括一个或多个资源接口,其促进资源彼此访问(例如,以促进计算资源环境的虚拟计算机系统将数据存储在数据库或用于所收集数据的其他结构中或从其检索数据)。虚拟计算机系统可包括被配置为实例化虚拟机实例的计算资源的集合。井场操作员195可通过非现场用户装置303或现场用户装置302与虚拟计算机系统进行交互。可在井场计算资源环境305中利用其他计算机系统或计算机系统服务,诸如在专用或共享计算机/服务器和/或其他物理装置上提供计算资源的计算机系统或计算机系统服务。井场计算资源环境305可包括单个服务器(在离散硬件部件中或作为虚拟服务器)或多个服务器(例如,网络服务器、应用程序服务器或其他服务器)。服务器可以是例如以物理和/或虚拟配置布置的计算机。
井场计算资源环境305还可包括数据库,所述数据库可以是或包括运行一个或多个数据集合的计算资源的集合。可通过利用API调用来操作和管理这类数据集合。诸如传感器数据351-356的数据集合可供井场计算资源环境305中的其他资源或访问井场计算资源环境305的用户装置(例如,现场用户装置302和/或非现场用户装置303)使用。远程计算资源环境306可以包括与上述那些资源类似的计算资源,诸如单个计算机或多个计算机(在离散硬件部件或虚拟计算机系统中)。
图5和图6是根据本公开的一个或多个方面的控制中心400的示例性实现方式的至少一部分的透视图和剖面图。控制中心400可以是或形成图1所示的控制中心190的至少一部分。以下描述共同参考图1至图6。
控制中心400包括设施405(例如,房间、舱室、拖车等),所述设施包含用于监测和控制子系统311-316和井施工系统100、200的其他部分的各种控制装置。设施405可包括前侧401和后侧403。前侧401可朝向由井施工系统100、200建造的钻柱120或最靠近所述钻柱定位。后侧403可背离钻柱120。设施405可包括地板402、前壁404、左壁406、右壁408、后壁410和屋顶412。设施405还可在壁404、406、408、410和/或屋顶412中的一者或多者中具有侧门414、后门416和多个窗口421-428。窗口421-428中的每一个都可由与墙壁连接的结构框架430围绕,并且在窗口421-428的前方或沿着所述窗口支撑窗口安全防护件432(例如,条、格栅)。
设施405可在设施405的前侧401处具有观察区域440,井场操作员195可从所述观察区域直接观察钻柱120、钻台114和/或井施工系统100、200的其他部分。观察区域440可由若干侧上的窗口423-428围绕或限定,以增加井场操作员195对井施工系统100的水平和竖直视角。观察区域440的一部分442(例如,窗口423-427)可突出或伸出超过设施405的其他部分(例如,前壁404),以促进井场操作员195对井施工系统100、200的观察。观察区域440可位于设施405的一侧。观察区域440可由以下围绕或至少部分地由其限定:允许井场操作员195向前看的前窗424;允许井场操作员195向侧面(即,向左和向右)看的两个侧窗423、425;允许井场操作员195向下看的下窗426;以及允许井场操作员195向上看的一个或多个上窗427、428。下窗426和/或至少一个上窗427可相对于前窗424对角地延伸。
控制中心400可包括设施405内的一个或多个井场操作员控制工作站。工作站可由井场操作员195用于监测和控制子系统311-316以及井施工系统100、200的其他部分。例如,观察区域440可包含第一控制工作站450,所述第一控制工作站邻近窗口423、424、425、426、428定并且至少部分地在观察区域440的延伸部分442内定位,诸如可允许井场操作员195利用控制工作站450不受阻挡地观察钻柱120、钻台114和/或井施工系统100、200的其他部分。观察区域440还可包含第二控制工作站452,所述第二控制工作站邻近第一控制工作站450(例如,在其后方)且邻近窗口425定位,但是可能不在观察区域440的延伸部分442内定位。可将控制工作站452升高到至少部分地高于控制工作站450,以减少由控制工作站450引起的视野阻挡,并因此允许井场操作员195利用控制工作站452在高于控制工作站450的位置通过前窗424来观察钻柱120、钻台114和/或井施工系统100、200的其他部分。控制中心400还可包括第三控制工作站454,所述第三控制工作站邻近控制工作站450、452且邻近窗口421、422定位,但是不在观察区域440内定位。
控制中心400可还包括处理装置456(例如,控制器、计算机、服务器等),所述处理装置可操作以提供对井施工系统100、200的一个或多个部分的控制并且/或者可操作以监测井施工系统100、200的一个或多个部分的操作。例如,处理装置456可与本文所述的各种地面和井下装备通信地连接,并且可操作以从这种装备接收信号或向所述装备发射信号以执行本文所述或以其他方式在本公开的范围内的各种操作。处理装置456可存储可执行程序、指令和/或操作参数或设定点,包括用于实现本文所述的操作的一个或多个方面。处理装置456可与控制工作站450、452、454通信地连接。尽管处理装置456被示出为位于设施405内,但是处理装置456可位于设施405之外。此外,尽管处理装置456被示出为与控制工作站450、452、454分离并且不同的单个装置,但是控制工作站450、452、454中的一者或多者可包括对应的处理装置456,其与这种对应的处理装置456关联地设置或形成所述对应的处理装置的至少一部分。
控制工作站450、452、454可能够操作以通过井场操作员195将命令输入或以其他方式传达到处理装置456,并且将信息从处理装置456显示或以其他方式传达到井场操作员195。控制工作站450、452、454中的一者或多者可包括操作员椅子460以及包括一个或多个输入装置462(例如,键盘、鼠标、操纵杆、触摸屏、传声器等)和一个或多个输出装置464(例如,视频监视器、打印机、音频扬声器、触摸屏等)的HMI系统。输入装置462和输出装置464可与操作员椅子460关联地设置和/或集成,以允许井场操作员195向处理装置456输入命令或其他信息,并且从处理装置456和井施工系统100、200的其他部分查看、收听和/或以其他方式接收信息。控制工作站450、452、454中的一者或多者可以是或形成图1所示的控制工作站197的至少一部分,并且处理装置456可以是或形成图1所示的处理装置192的至少一部分。
控制中心400可还包含WC系统315的BOP控制站470(例如,控制面板),所述BOP控制站可操作以监测和控制WC系统315的一个或多个部分。例如,BOP控制站470可与BOP控制单元137和BOP装备130、132通信地连接,并且可操作以监测和控制BOP控制单元137和BOP装备130、132的操作。
BOP控制站470可能够操作以向BOP控制单元137传达控制命令,所述控制命令由井场操作员195输入以用于控制BOP装备130、132,并且将指示BOP装备130、132以及BOP控制单元137的操作状态的信息显示或以其他方式传达到井场操作员195。BOP控制站470可包括处理装置(例如,图23所示的处理装置1000),所述处理装置可操作以存储可执行程序、指令和/或操作参数或设定点,包括用于实现本文所述的一个或多个BOP操作。BOP控制站470还可包括HMI系统,所述HMI系统包括一个或多个输入装置472(例如,按钮、按键、触摸屏等)和一个或多个输出装置474(例如,视频监视器、计量器具、音频扬声器、触摸屏等)。输入装置472和输出装置474可与BOP控制站470的外壳或壳体关联地设置和/或集成,以允许井场操作员195向BOP控制站470输入命令或其他信息,以控制BOP装备130、132并且从BOP控制站470接收信息以监测BOP装备130、132的操作状态。
BOP控制单元470可与控制工作站450、452、454中的一者或多者通信地连接,诸如可允许通过控制工作站450、452、454监测和控制WC系统315的一个或多个部分。例如,控制工作站450、452、454中的一者或多者或处理装置456可直接地与BOP控制站470的处理装置通信地连接,或者诸如通过BOP控制站470的输入装置472和输出装置474间接地与其通信地连接。这种连接可允许控制工作站450、452、454通过BOP控制站470接收指示BOP控制单元137和BOP装备130、132的操作状态的信息。这种连接可还允许控制工作站450、452、454通过BOP控制站470将控制命令发射到BOP控制单元137和BOP装备130、132。这种连接可同样或替代地促进BOP控制站470通过控制工作站450、452、454进行的控制,诸如可致使BOP控制站470由或通过控制工作站450、452、454引导来控制BOP控制单元137和BOP装备130、132。
控制工作站450、452、454可能够操作以通过输出装置464向井场操作员195显示指示BOP控制单元137和BOP装备130、132的操作状态的信息,以允许井场操作员在就坐于对应的操作员椅子460中时监测BOP控制单元137和BOP装备130、132的操作状态。控制工作站450、452、454可还能够操作以在就坐于对应的操作员椅子460中时通过输入装置462从井场操作员195接收控制命令,以发射到BOP控制站470以控制BOP控制单元137和BOP装备130、132。
图7是根据本公开的一个或多个方面的与井施工系统100、200通信地连接并且可操作以控制所述井施工系统的井场操作员控制工作站500的示例性实现方式的一部分的顶视图。图7所描绘的控制工作站500是上文所述的控制工作站450、452、454的示例性实现方式。控制工作站500可促进接收和显示各种信息,诸如传感器信号或信息(例如,传感器数据351-356)、控制命令(例如,控制数据361-366)、发生的过程、被检测到的事件以及井施工系统100、200的子系统311-316的各种装备的操作状态。以下描述共同参考图1至图7。
控制工作站500包括操作员椅子502(例如,钻工的椅子)和HMI系统,所述HMI系统包括与操作员椅子502集成、由所述操作员椅子支撑或以其他方式与所述操作员椅子关联地设置的多个输入和输出装置。输入装置允许井场操作员195输入命令或其他信息以控制井施工系统100、200的井场装备,并且输出装置允许井场操作员195接收指示井场装备的操作状态的传感器信号和其他信息。操作员椅子502可包括座椅504、左扶手506和右扶手508。
控制工作站500的输入装置可包括多个物理控件,诸如左操纵杆510、右操纵杆512和/或其他物理控件514、515、516、518,诸如按钮、按键、开关、旋钮、刻度盘、滑动条、鼠标、键盘和传声器。操纵杆510、512和/或物理控件514、515、516中的一者或多者可被集成到操作员椅子502的对应扶手506、508中或以其他方式由所述对应扶手支撑,以允许井场操作员195通过操作员椅子502操作这些输入装置。此外,可将一个或多个物理控件518集成到对应的操纵杆510、512中,以允许井场操作员195在操作操纵杆510、512的同时操作这些物理控件518。物理控件可包括紧急停止(E-停止)按钮515,其可电气连接到一个或多个井场装备件(例如,RN 151、TDA 202、DW 119、LSA 228、LTC 244、SGA 262、顶驱116等)的E-停止继电器,使得井场操作员195可在紧急情况和其他情况期间关闭井场装备。
控制工作站500的输出装置可包括一个或多个视频输出装置526(例如,视频监视器)、打印机、扬声器和与操作员椅子502关联地设置并且可操作以向井场操作员195显示指示井施工系统100、200的操作状态的传感器信号和其他信息的其他输出装置。视频输出装置526可被实现为一个或多个LCD显示器、LED显示器、等离子体显示器、阴极射线管显示器和/或其他类型的显示器。
视频输出装置526可在操作员椅子502的前方或以其他方式邻近其设置。视频输出装置526可包括多个视频输出装置532、534、536,每个视频输出装置专用于以预定(例如,编程的)方式显示预定信息。尽管视频输出装置526被示出为包括三个视频输出装置532、534、536,但是视频输出装置526可以是或包括一个、两个、四个或更多个视频输出装置。
视频输出装置532、534、536可各自以预定方式显示指示井施工系统100、200的所选择部分的操作状态的所选择传感器信号或信息。例如,视频输出装置534、536可显示由井施工系统100、200的各种传感器(例如,传感器321-326)生成的传感器信号或信息540(例如,传感器数据351-356),以允许井场操作员195监测子系统311-316的操作状态。信息540可以虚拟或计算机生成的列表、菜单、表格、图表、条、计量表、灯和示意图等其他实例的形式显示。
视频输出装置526中的一者或多者可被配置为显示由摄像机198中的一者或多者生成的视频信号(即,视频馈送)。例如,视频输出装置532可专用于显示由摄像机198中的一者或多者生成的视频信号。当显示来自多个摄像机198的视频信号时,视频输出装置532可显示多个视频窗口,每个视频窗口显示对应的视频信号。此外,其他视频输出装置534、536中的一者或多者还可显示来自摄像机198中的一者或多者的视频信号。例如,视频输出装置534、536中的一者或两者可显示一个或多个画中画(PIP)视频窗口544,每个PIP视频窗口显示来自摄像机198中的对应摄像机的视频信号。PIP视频窗口544可沿着或邻近传感器信息540嵌入或插入。对其视频信号将显示在视频输出装置526上的摄像机198的寻找(即,选择)可由井场操作员195手动选择或通过控制系统300诸如基于井施工系统100、200处的操作事件(例如,钻井事件、井施工操作阶段等)自动操作,使得显示与当前发生的事件有关的视频信号。
控制工作站500可还包括组合装置,所述组合装置既可操作为输入装置,也可操作为输出装置,以向井场操作员195显示信息并且从井场操作员195接收命令或信息。这类装置可以是或包括触摸屏522、524,所述触摸屏可操作以显示多个软件(例如,虚拟的、计算机生成的)按钮、开关、旋钮、刻度盘、图标和/或其他软件控件530,从而允许井场操作员195通过与触摸屏522、524的手指接触来操作(例如,点击、选择、移动)软件控件530,以控制子系统311-316的各种井场装备。软件控件530也可由物理控件514、516、操纵杆510、512或控制工作站500的其他输入装置来操作。软件控件530和/或在触摸屏522、524上显示的其他特征也可显示传感器信号或信息(例如,传感器数据351-356)、操作设置、设定点和/或所选择井场装备的状态,以供井场操作员195查看。例如,软件控件530可更改颜色,在位置或方向上移动和/或显示传感器信息、设定点和/或操作值(例如,温度、压力、位置)。触摸屏522、524可被设置在扶手506、508或操作员椅子502的其他部分上,由其支撑或集成到其中,以允许井场操作员195通过操作员椅子502操作触摸屏522、524上显示的软件控件530。
每个视频输出装置526和触摸屏522、524可显示(即,生成)多个显示屏幕(即,集成显示系统),每个显示屏幕向井场操作员195显示指示井施工系统100、200的操作状态的所选择传感器信号或信息540和软件控件530,以分别用于控制井施工系统的所选择部分。每个显示屏幕可将软件控件530和/或来自一个或多个井场装备件(例如,子系统311-316)的传感器信息540与由控制系统300生成的信息(例如,监测过程374、控制过程375和控制数据361-366、373)集成,以供井场操作员195查看和/或操作。显示屏幕可在视频输出装置526和/或触摸屏522、524中的一者或多者上交替地示出或显示,或者在这些装置中的一者或多者上同时示出或显示。旨在在视频输出装置526和/或触摸屏522、524上显示的显示屏幕可由井场操作员195通过物理控件514、516、518和/或软件控件530来选择。旨在在视频输出装置526和/或触摸屏522、524上显示的显示屏幕可同样或替代地由控制系统300基于在井施工系统100、200处检测到的操作事件(例如,装备故障、危险的钻井条件)或计划的操作事件(例如,井施工操作的更改的时期或阶段)来自动选择,使得显示与当前发生的事件有关的信息。触摸屏522、524生成的每个显示屏幕可显示可由井场操作员195操作以控制与软件控件530相关联的井场装备的软件控件530,并且视频输出装置526生成的每个显示屏幕可显示指示与信息540相关联的井场装备的操作状态的信息540。因此,在触摸屏522、524上显示的显示屏幕在下文中可称为控制屏幕,并且在视频输出装置526上显示的显示屏幕在下文中可称为状态屏幕。
触摸屏522、524可能够操作以显示一个或多个控制屏幕(例如,配置屏幕),其可用于操作、设置、调整、配置或以其他方式控制子系统311-316或其他井场装备。每个控制屏幕可显示一个或多个软件控件530,诸如可允许井场操作员195通过与来自操作员椅子502的触摸屏522、524手指接触来操作、设置、调整、配置或以其他方式控制子系统311-316或其他井场装备。图8至图10是软件控件552、554、556的示例性实现方式,所述软件控件可在触摸屏522、524上显示并且由井场操作员195操作以操作、设置、调整、配置或以其他方式控制子系统311-316或井施工系统100、200的其他井场装备。以下描述共同参考图7至图10。
可通过物理控件514、516和/或通过井场操作员195的手指接触来按压、点击、选择、移动或以其他方式操作软件控件552、554、556来增大、减小、更改或以其他方式输入操作参数、设定点和/或用于控制井施工系统100、200的一个或多个井场装备件的指令。软件控件552、554、556也可显示软件控件552、554、556上或与之关联的所输入的和/或当前操作参数,以供井场操作员195查看。与软件控件552、554、556相关联的操作参数、设定点和/或指令可包括装备操作状态(例如,导通或关断、向上或向下、设置或释放、位置、速度、温度等)、钻井参数(例如,深度、吊钩负荷、扭矩等)、辅助参数(例如,泵的振动数据)和流体参数(例如,流量、压力、温度等)等其他实例。
软件控件552可以是或包括软件按钮,所述软件按钮可被操作以增大、减小、更改或以其他方式输入不同的操作参数、设定点和/或用于控制井施工系统100、200的与软件控件552相关联的一个或多个部分的指令。软件控件554可以是或包括与井施工系统100、200的一个或多个方面有关的项目(例如,装备、过程、操作阶段、装备子系统等)的列表或菜单,所述列表或菜单可被操作以选择列表上的一个或多个项目。所选择项目可被突出显示、进行不同的着色或者诸如通过复选标记、圆圈、点或与所选择项目关联地出现的其他字符/图标以其他方式进行指示。软件控件556可以是或包括不同软件控件的组合,其可被操作以增大、减小、更改或以其他方式输入不同的操作参数、设定点和/或用于控制井施工系统100、200的与软件控件556相关联的一个或多个部分(诸如井施工系统100、200的泵)的指令。软件控件556可包括滑块553,所述滑块可沿着刻度条移动或以其他方式操作,以增大、减小或以其他方式更改泵速或与滑动条553相关联的另一个操作参数。输入的泵速可在显示窗口555中示出。软件控件556还可包括软件按钮557,诸如可被操作以起动、暂停和停止泵或井施工系统100、200的与软件按钮557相关联的另一个部分的操作。
图11至图15是根据本公开的一个或多个方面的可显示在触摸屏522、524上的控制屏幕601-605(例如,配置屏幕或菜单)的示例性实现方式。每个控制屏幕601-605可由井场操作员195通过与触摸屏522、524的手指接触(和/或其他输入装置)来操作,以操作、设置、调整、配置或以其他方式控制子系统311-316或井施工系统100、200的与控制屏幕601-605相关联的或在其上显示的其他井场装备。以下描述共同参考图11至图15。
每个控制屏幕(包括控制屏幕601-605)可显示选择栏610,所述选择栏用于在有待在对应的触摸屏522、524上显示哪个控制屏幕和/或有待在视频输出装置526中的每一个上显示哪个状态屏幕之间切换或对其进行选择。每个控制屏幕还可包括装备控制区域618,所述装备控制区域用于显示用于控制井施工操作和/或与控制屏幕相关联的井场装备的软件控件。选择栏610可包括装备菜单按钮612,所述装备菜单按钮在由井场操作员195操作时可致使控制屏幕选择菜单614(例如,下拉菜单或弹出菜单)出现。选择菜单614可包含多个按钮616,每个按钮与对应的井施工操作或有待控制的井场装备相关联并将其列出。井场操作员195可操作(例如,点击、触摸和/或以其他方式选择)按钮616中的一个,以选择井施工操作或井场装备,从而致使显示用于控制相关联的井施工操作或井场装备的对应的控制屏幕。
在选择按钮616中的一个之后,(图12至图15所示的)多个软件控件630可出现在装备控制区域618中,并且可在控制屏幕识别区域620中列出或以其他方式识别所选择的井施工操作或井场装备。当井场操作员195通过选择不同的按钮616在各种控制屏幕之间切换时,显示在装备控制区域618中的软件控件630或其他信息将更改。如图11所示,可被选择来在触摸屏522、524上显示的示例性控制屏幕可包括:起下钻控制屏幕,所述起下钻控制屏幕显示用于控制可共同操作以执行起下钻操作的井场装备的自动操作的软件控件;钻井控制屏幕,所述钻井控制屏幕显示用于控制可共同操作以执行钻井操作的井场装备的自动操作的软件控件;钻管操纵控制屏幕,所述钻管操纵控制屏幕显示用于控制可共同操作以在井场处移动钻管的井场装备的自动操作的软件控件;以及多个单独的装备控制屏幕,每个单独的装备控制屏幕显示用于自动地和/或手动地控制单独的井场装备的操作的软件控件,所述单独的井场装备诸如猫道131、TDA 202、立根盒164、FIB 166、TBR 254、SGA 262、LTC244、ITC 236、UTC 242、LSA 228、立根盒164、猫道131、顶驱116、RN 151、节流阀162和流体重调装备170等其他实例。尽管本文未描述,但是本公开的范围内的控制屏幕可包括显示其他单独的井场装备和/或井场装备子系统(例如,子系统311-316)的软件控件的控制屏幕。
每个控制屏幕(包括控制屏幕601-605)也可用于在有待在哪个视频输出装置532、534、536上显示哪个状态屏幕之间切换或对其进行选择。例如,选择栏610可包括状态屏幕选择按钮622,每个状态屏幕选择按钮与视频输出装置532、534、536中的对应的视频输出装置相关联,并且当由井场操作员195操作时可操作以致使对应的状态屏幕选择菜单624(例如,下拉菜单或弹出菜单)出现。每个选择菜单624可包含多个按钮626,每个按钮与对应的井施工操作、井场装备和/或井施工系统100、200的有待显示的子系统(例如,子系统311-316)相关联并将其列出。井场操作员195可操作(例如,点击、触摸和/或以其他方式选择)按钮622和按钮626中的一者来选择视频输出装置532、534、536中的一个和井施工操作、井场装备或子系统,从而致使显示指示所选择井施工操作、井场装备或子系统的操作状态的传感器信号或信息540的对应的状态屏幕被显示在所选择视频输出装置532、534、536上。下文更详细地描述可在视频输出装置532、534、536上显示的状态屏幕。
当被操作时,软件控件630可激活、停用、起动、停止、配置或以其他方式控制与软件控件630相关联的井场装备的操作。软件控件630可诸如通过操作“自动”软件按钮来发起与控制屏幕相关联的井场装备的自动操作。软件控件630还可诸如通过操作“手动”软件按钮来致使给予井场操作员195与控制屏幕相关联的井场装备的手动控制。软件控件630可按相关装备和/或相关操作分组,其可由与每组软件控件632相关联的文本632识别。
此外,每个软件控件630可列出或以其他方式识别通过软件控件630控制或以其他方式与所述软件控件相关联的装备件或操作。软件控件630中的一者或多者可列出或以其他方式指示与软件控件630相关联的井场装备或操作的操作状态(即,反馈)。例如,软件控件630中的一者或多者可更改颜色、文本、形状或以其他方式更改以指示与软件控件630相关联的井场装备件被激活、停用或处于预定位置,或者与软件控件630相关联的操作已开始、停止或处于特定阶段。
图12是根据本公开的一个或多个方面的可用于控制与钻井操作相关联的和/或共同操作以执行钻井操作的井场装备的自动、半自动和/或手动操作的“钻井”控制屏幕602的示例性实现方式。控制屏幕602可在装备控制区域618中显示用于控制井施工系统100、200执行的钻井操作的各种井场装备和/或操作参数的各种软件控件630。例如,当操作时,软件控件630可激活、停用、起动、停止、配置或以其他方式控制与钻井操作相关联的井场装备的自动、半自动和/或手动操作。这种井场装备可包括顶驱116、DW 119、泵144和BOP装备130、132等其他实例。
图13是根据本公开的一个或多个方面的可用于控制与钻管操纵(例如,移动、存储)操作相关联的和/或共同操作以执行钻管操纵操作的井场装备的自动、半自动和/或手动操作的“管操纵”控制屏幕603的示例性实现方式。控制屏幕603可在装备控制区域618中显示用于控制井施工系统100、200执行的钻管操纵操作的各种井场装备和/或操作参数的各种软件控件630。例如,当操作时,软件控件630可激活、停用、起动、停止、配置或以其他方式控制与钻管操纵操作相关联的井场装备的自动、半自动和/或手动操作。这种井场装备可包括猫道131、TDA 202、立根盒164,FIB 166,TBR 254,SGA 262、LTC 244、ITC 236、UTC242、LSA 228、RN 151和往复运动的卡瓦161等其他实例。
图14是根据本公开的一个或多个方面的可用于控制顶驱116的自动、半自动和/或手动操作的“顶驱”控制屏幕604的示例性实现方式。控制屏幕604可在装备控制区域618中显示用于配置和/或控制顶驱116执行的自动、半自动和/或手动操作和/或与顶驱116相关联的操作参数的各种软件控件630。例如,当操作时,软件控件630可激活、停用、起动、停止、配置或以其他方式控制顶驱116的一个或多个部分(诸如驱动轴125、抓取器、转环、管件操纵组件127和顶驱116的其他部分)的操作。软件控件630还可用于控制可与顶驱116直接或紧密地关联或与所述顶驱紧密关联地操作的其他井场装备,诸如RN 151。
图15是根据本公开的一个或多个方面的可用于控制RN 151中的一者的自动、半自动和/或手动操作的“钻工1”控制屏幕605的示例性实现方式。控制屏幕605可在装备控制区域618中显示用于配置或控制RN 151执行的自动、半自动和/或手动操作和/或与RN 151相关联的操作参数的各种软件控件630。例如,当操作时,软件控件630可激活、停用、起动、停止、配置或以其他方式控制RN 151的一个或多个部分(诸如旋扣器和扭矩扳手,包括上钳和下钳以及相关联的夹具)的操作。软件控件630还可用于控制可与RN 151直接或紧密地关联或与所述RN紧密关联地操作的其他井场装备。
视频输出装置126和/或触摸屏522、524还可显示由井场操作员195用来引导或辅助井场操作员195手动控制井施工系统100、200的所选择操作或单个井场装备件的手动控制指南菜单或屏幕。指南屏幕可显示操纵杆510、512、相关联的物理控件518和/或其他物理控件514、516中的所选择一者相对于所选择操作或单个井场装备件的控制功能。例如,当在显示在触摸屏522、524中的一者上的控制屏幕中的一者上选择“手动”软件控件630按钮时,可发起手动控制。然后,控制系统300可中止相关联的井场装备的自动操作,将操作控制移交到预定操纵杆510、512和/或其他物理控件514、516,并且显示列出用于手动控制与控制屏幕相关联的井场装备的控制功能的对应的手动控制指南。
图16是显示用于通过左操纵杆510和物理控件514控制钻井操作的控制功能的手动控制指南屏幕606的示例性实现方式。指南屏幕606可显示识别有待控制的操作或井场装备的标题栏640以及用于控制这种操作或井场装备的操纵杆510和/或物理控件514。指南屏幕606可包括显示操纵杆510的示意图644和相关联的物理控件518(例如,操纵杆按钮和拇指杆)的示意图646的操纵杆控制区域642。每个示意性按钮646与描述操纵杆510的每个对应的物理按钮518的控制功能的文本638关联。操纵杆控制区域642还可显示箭头648和描述与操纵杆510的移动相关联的控制功能的对应的文本650以及箭头652和描述与操纵杆拇指杆518的移动相关联的控制功能的对应的文本654。指南屏幕606还可包括按钮控制区域656,所述按钮控制区域显示对应的物理控件514的示意图658。按钮控制区域656可还显示描述与对应的物理控件514中的每一个的操作相关联的控制功能的文本660。指南屏幕606可还显示“退出”软件控件662,所述“退出”软件控件可被操作以中止钻井操作的手动控制并且关闭指南屏幕606。
如上文关于图7所描述的,本公开的范围内的操作员工作站可在视频输出装置526中的一者或多者上显示多个状态屏幕,每个状态屏幕显示由井场施工系统100的各种传感器(例如,传感器321-326)生成的所选择传感器信号或信息(例如,传感器数据351-356),诸如可允许井场操作员监测操作、井场装备和/或本文描述的装备子系统(例如,子系统311-316)。图17至图21是根据本公开的一个或多个方面的在视频输出装置526中的一者或多者上显示的状态屏幕701-706的示例性实现方式的视图。以下描述共同参考图1至图4、图7和图17至图21。
包括状态屏幕701-706的状态屏幕可交替显示在视频输出装置526中的一个上。一些状态屏幕可显示井施工操作(例如,起下钻、钻井、管操纵等)的操作状态,所述井施工操作涉及以协调方式操作以执行这种操作的多个井场装备件,这可允许井场操作员195在单个状态屏幕上监测这种操作的操作状态或参数。一些状态屏幕可显示单个井场装备件或井场装备的子系统(例如,子系统311-316)的操作状态,诸如还可允许井场操作员195监测单个装备件或装备子系统的操作状态或参数。如上所述,可通过触摸屏522、524选择状态屏幕和对应的操作、井场装备或装备子系统。如图11所示,可选择显示的示例性状态屏幕可包括:起下钻状态屏幕,所述起下钻状态屏幕显示指示起下钻操作的操作状态的信息;钻井状态屏幕,所述钻井状态屏幕显示指示钻井操作的操作状态的信息;管操纵状态屏幕,所述管操纵状态屏幕显示指示钻管操纵操作的操作状态的信息;以及多个子系统状态屏幕,每个子系统状态屏幕显示指示井施工系统100、200的对应的子系统的操作状态的信息。尽管本文未描述,但是本公开的范围内的状态屏幕可同样或者替代地包括显示指示本文所述的单个井场装备件的操作状态的信息的状态屏幕。
包括状态屏幕701-706的状态屏幕可包括井场状态屏幕指示器和警报窗口或区域710,其可在视觉上指示正在所选择视频输出装置526上显示哪个操作或井场装备以及与操作或井场装备相关联的安全警报或操作警报是否处于活动状态。例如,区域710可包括多个指示器712(例如,文本、图标、图形等),其列出可通过对应的状态屏幕显示的操作、井场装备和/或装备子系统。对应于当前显示的状态屏幕的操作、井场装备或装备子系统的指示器712可显现或变亮、突出显示或以其他方式标记以向井场操作员195指示显示了哪个状态屏幕。区域710可还包括多个警报或事件指示器714(例如,灯),每个警报或事件指示器与对应的操作、井场装备或装备子系统指示器712相关联。指示器714中的一者或多者可以诸如通过(图4所示的)控制系统300的操作来激活(例如,点亮、改变颜色等),以在视觉上向井场操作员195通知在对应的操作、井场装备或装备子系统处发生或与之相关联的警报或操作事件。响应于事件指示器714被激活,井场操作员195可切换到对应于所激活的事件指示器714的状态屏幕以评估事件和/或实现适当的反制措施或动作。代替在状态屏幕之间手动更改,状态屏幕可自动更改以示出对应于经历事件的操作、井场装备或装备子系统的状态屏幕。
包括状态屏幕701-706的状态屏幕可还包括主要操作状态窗口或区域716,其显示指示与所显示的状态屏幕相关联的操作、井场装备或装备子系统的操作状态的所选择传感器信号或信息。显示在主要操作状态区域716中的信息可由执行操作或形成与所显示的状态屏幕相关联的装备子系统的实际井场装备来生成。当显示不同的显示屏幕时,显示在主要操作状态区域716中的信息可改变。主要操作状态区域716中的信息可以列表、菜单、表格、图形、栏、计量表、灯和/或示意图等其他实例的形式显示。
包括状态屏幕701-706的状态屏幕可还包括次要操作状态窗口或区域718,其显示指示钻井操作的操作状态和/或井施工操作的一般状态的所选择传感器信号或信息,诸如可允许井场操作员在监测显示在主要操作状态区域716中的具体操作、井场装备或装备子系统的同时监测钻井操作和/或其他井施工操作的进度。次要操作状态区域718还可显示指示与钻井操作有关但不一定执行钻井操作的其他井场装备的操作状态的传感器信号或信息。当显示不同的状态屏幕时,显示在次要操作状态区域718中的信息可保持不变或部分更改,诸如可允许井场操作员195在监测与不同的状态屏幕相关联的不同的操作、井场装备或装备子系统的同时监测钻井操作和/或其他井施工操作的进度。
然而,当显示不同的状态屏幕时,显示在次级操作状态区域718中的信息可更改。变化的信息可允许井场操作员195监测与显示在主要操作状态区域716中的操作有关但不一定直接执行所述操作的其他井场装备的操作状态,和/或监测与显示在次要操作状态区域716中的井场装备或装备子系统有关的其他井场装备的操作状态。次要操作状态区域718中的信息可以列表、菜单、表格、图形、栏、计量表、灯和/或示意图等其他实例的形式显示。
包括状态屏幕701-706的每个状态屏幕也可包括列出和/或描述与显示在主要操作状态区域716中的操作、井场装备或装备子系统有关的一个或多个方面或者井施工操作的另一个方面的详细描述窗口或区域720。例如,如图17和图18所示,描述区域720可显示井场操作员195已经、正在或将要在井场处执行或监督的工作或活动(例如,施工或工作计划)的一般和/或详细描述。描述区域720可显示关于工作的前摄性信息和/或引导未来的工作的动作召唤。工作描述可能包括项目阶段或时期的标题或名称、完成项目阶段的估计完成日期(即截止日期)和/或井场操作员195在项目阶段期间将要实现的操作步骤或动作的列表。然而,控制系统300可自动操作井场装备或子系统以诸如通过将预定的控制命令发射到对应的井场装备件或子系统来根据施工或工作计划自动实现这类步骤或动作。如上所述,可例如通过在相关联的控制屏幕上操作“自动”软件按钮630来发起这种自动操作。
如图19至图21所示,描述区域720可同样或者替代地显示与在井施工系统100、200处检测到的或以其他方式发生的事件有关的详细描述或信息。描述区域720也可列出和/或描述与可响应于所述事件而执行或以其他方式实现的事件有关的一种或多种反制措施(例如,校正动作、操作顺序)。根据控制系统300(例如,计算资源环境305)操作所处的事件和/或模式(例如,建议、联锁、自动),描述区域720可描述有待由井场操作员195发起或以其他方式实现的校正动作。然而,控制系统300可诸如通过将预定的控制命令发射到对应的井场装备件或子系统来自动地实现校正动作、或者致使校正动作被自动实现。显示在描述区域720中的信息可仅显示与示出在主要操作状态区域716的与操作、井场装备或装备子系统有关的事件和/或校正动作,并且因此当在状态屏幕之间切换时会更改。然而,当在状态屏幕之间切换时,显示在描述区域720中的信息可能不更改,并且可能诸如按时间顺序或重要性顺序列出每个检测到的事件和/或对应的校正动作。如上所述,控制系统300可自动更改状态屏幕以示出经历事件的操作、井场装备或装备子系统。
包括状态屏幕701-706的每个状态屏幕可还包括(图20和图21所示的)一个或多个PIP视频窗口722,每个PIP视频窗口实时显示来自预定摄像机198的视频信号以显示与显示在主要操作状态区域716中的操作、井场装备或装备子系统相关联的井场装备。PIP视频窗口722可以被嵌入或插入在对应的状态屏幕上,诸如在主要操作状态区域716内。PIP视频窗口722所示的视图可在不同的摄像机198之间手动或自动地切换,以显示不同的井场装备或井场装备的不同视图。
如上所述,可通过触摸屏522、524选择有待显示在视频输出装置526上的状态屏幕。然而,包括显示在指示器和警报区域710、主要操作状态区域716、次要操作状态区域718、详细描述区域720和/或PIP窗口722中的传感器信号或信息的状态屏幕可基于井施工操作的连续阶段而自动更改。例如,当井施工操作通过连续的阶段(例如,起下钻、钻井、管操纵等)进行时,控制系统300可致使视频输出装置526自动更改并显示包括指示执行井施工操作的当前阶段或以其他方式与井施工操作的当前阶段相关联的井场装备的操作状态的信息的状态屏幕。
井场操作员195可调整或以其他方式配置包括状态屏幕701-706的每个状态屏幕,以在每个状态屏幕上的所选位置中显示各种信息区域710、716、718、720中的一者或多者。例如,指示器和警报区域710可显示在状态屏幕的顶部处,详细描述区域720可显示在状态屏幕的底部处,主要操作状态区域716可显示在状态屏幕的左侧的中间,并且次要操作状态区域718可显示在状态屏幕的右侧。此外,显示在每个状态屏幕上的PIP视频窗口722的位置和/或大小(即,尺寸)也可被调整或以其他方式进行选择。信息区域710、716、718、720和PIP视频窗口722在状态屏幕上的相对位置也可例如经由物理控件514、516、518中的一者或多者诸如通过将信息区域710、716、718、720和/或PIP视频窗口722拖放到状态屏幕上的所选位置来进行选择。
图17是根据本公开的一个或多个方面的显示指示与钻杆起下钻操作相关联并且可共同操作以执行钻杆起下钻操作的各种井场装备的操作状态的传感器信号或信息的状态屏幕701的示例性实现方式。当井场操作员195或控制系统300致使起下钻操作状态屏幕701显示在视频输出装置526中的一个上时,与起下钻操作相关联的指示器712(诸如字母“TR”)可能显得或变得突出显示,以在视觉上向井场操作员195指示正在显示起下钻操作状态屏幕。主要操作状态区域716可显示信息,诸如吊钩负荷、钻压、游动滑车位置、钻工扭矩、泥浆补给罐累积量或容积以及返回流量等其他实例。次要操作状态区域718可显示与钻井操作有关的信息,诸如吊钩负荷、游动滑车位置、钻头深度、井筒深度、井筒中的立根或管件的数量、立管压力、顶驱台车位置、内部BOP位置、顶驱管连接状态、吊卡状态、伸出部分连接状态和卡瓦状态等其他实例。描述区域720可显示与起下钻操作有关的工作计划(即,井施工计划),包括在起下钻操作期间井场操作员195将在井场处执行或监督的动作或步骤。然而,如上所述,描述区域720可同样或者替代地显示指示操作事件的信息。
图18是根据本公开的一个或多个方面的显示指示与钻井操作相关联并且可共同操作以执行钻井操作的各种井场装备的操作状态的传感器信号或信息的状态屏幕702的示例性实现方式。当井场操作员195或控制系统300致使钻井操作状态屏幕702显示在视频输出装置526中的一个上时,与钻井操作相关联的指示器712(诸如字母“DR”)可能显得或变得突出显示,以在视觉上向井场操作员195指示正在显示钻井操作状态屏幕。主要操作状态区域716可显示信息,诸如吊钩负荷、游动滑车速度、钻压、钻进速率、立管压力、顶驱扭矩、扭矩扳手扭矩、顶驱旋转速度、钻井液损失/增益和钻井液返回流量等其他实例。次要操作状态区域718可显示与钻井操作有关的信息,诸如与钻井液(即,泥浆)操作状态和/或在用罐操作状态有关或指示上述内容的信息。描述区域720可显示与钻井操作有关的工作计划(即,井施工计划),包括在钻井操作期间井场操作员195将在井场处执行或监督的动作或步骤。然而,如上所述,描述区域720可同样或者替代地显示指示操作事件的信息。
如上所述,状态屏幕可显示指示井场装备子系统(例如,子系统311-316)的操作状态的传感器信号或信息。图19是根据本公开的一个或多个方面的显示指示RC系统311的操作状态的传感器信号或信息的RC系统状态屏幕703的示例性实现方式。当井场操作员195或控制系统300致使RC系统状态屏幕703显示在视频输出装置526中的一个上时,与RC系统311相关联的指示器712(诸如字母“RC”)可能显得或变得突出显示,以在视觉上向井场操作员195指示正在显示RC系统状态屏幕703。主要操作状态区域716可显示与形成RC系统311的各种井场装备件有关的传感器信号或信息,所述各种井场装备件诸如猫道131、TDA 202、立根盒164、FIB 166、TBR 254、SGA 262、LTC 244、ITC 236、UTC 242、LSA 228和RN 151等其他实例。主要操作状态区域716还可显示这种井场装备的示意图730,以在视觉上向井场操作员195显示这种井场装备的操作状态(例如,位置)。例如,钻台114、猫道131、立根盒164、FIB166、RN 151和TDA 202的示意图730可在视觉上向井场操作员195实时指示这种井场装备的各个部分的移动和位置。RC系统状态屏幕703可包括猫道131的滑块133、TDA 202、LSA 228、SGA 262、ITC 236和LTC 244以及包含管件111的竖直管架组件165(例如,立根盒164和FIB166)等其他实例的示意图730。示意图730的部分(例如,TDA 202的各个臂)可更改位置和/或颜色以在视觉上向井场操作员195指示所表示的井场装备的各种位置和移动。主要操作状态区域716还可在与井场装备的示意图730关联地定位的文本框732内显示指示井场装备的操作状态的传感器信号或信息。次要操作状态区域718可显示与钻井操作有关的信息和/或与RC系统311的操作状态有关的另外的信息,诸如未在主要操作状态区域716中显示的另外的信息。如上所述,描述区域720可显示指示操作事件的信息。然而,描述区域720可同样或者替代地显示与起下钻、钻井或其他井场施工操作有关的工作计划。
图20是根据本公开的一个或多个方面的显示指示CPC系统314的操作状态的传感器信号或信息的CPC系统状态屏幕705的示例性实现方式。当井场操作员195或控制系统300致使CPC系统状态屏幕705显示在视频输出装置526中的一个上时,与CPC系统314相关联的指示器712(诸如字母“CPC”)可能显得或变得突出显示,以在视觉上向井场操作员195指示正在显示CPC系统状态屏幕705。主要操作状态区域716可显示与形成CPC系统314的各种井场装备件(诸如节流歧管162和相关的井场装备)有关的传感器信号或信息。主要操作状态区域716还可显示井场装备的示意图730,以在视觉上向井场操作员195显示这种井场装备的操作状态。示意图730可包括例如节流歧管162的各种流体控制阀(例如,球形阀、可调整的节流阀)和与节流歧管162流体连接的多个流体控制阀。主要操作状态区域716可在视觉上向井场操作员195实时指示形成CPC系统314的井场装备的操作状态、流体流速、流体压力和阀位置。示意图730的各部分(例如,流体阀)可更改位置和/或颜色以向井场操作员195指示这种井场装备的操作状态(例如,位置)。主要操作状态区域716还可在与井场装备的示意图730关联地定位的文本框732内显示指示井场装备的操作状态的传感器信号或信息。次要操作状态区域718可显示与钻井操作有关的信息和/或与CPC系统314的操作状态有关的另外的信息,诸如未在主要操作状态区域716中显示的另外的信息。如上所述,描述区域720可显示指示操作事件的信息。然而,描述区域720可同样或者替代地显示与起下钻、钻井或其他井场施工操作有关的工作计划。示出节流歧管162或CPC系统314的另一个部分的实时视图的PIP视频窗口722可显示在主要操作状态区域716或CPC系统状态屏幕705的另一个区域中。
图21是根据本公开的一个或多个方面的显示指示WC系统315的操作状态的传感器信号或信息的WC系统状态屏幕706的示例性实现方式。当井场操作员195或控制系统300致使WC系统状态屏幕706显示在视频输出装置526中的一个上时,与WC系统315相关联的指示器712(诸如字母“WC”)可能显得或变得突出显示,以在视觉上向井场操作员195指示正在显示WC系统状态屏幕706。主要操作状态区域716可显示与形成WC系统315的各种井场装备件(诸如BOP装备130、132)有关的传感器信号或信息。显示在主要操作状态区域716中的信息可包括例如与以下有关的信息:隔水管/转喷器、POD控件、POD调节器、模拟传感器值(例如,压力、位置)、BOP事件警报信号和倾斜传感器。主要操作状态区域716可在视觉上向井场操作员195实时指示形成CPC系统314的井场装备的操作状态、流体压力和操作位置。主要操作状态区域716还可显示井场装备的示意图730,以在视觉上向井场操作员195显示这种井场装备的操作状态。示意图730可包括例如BOP堆叠130和环形流体控制装置132,并且在视觉上向井场操作员195指示BOP堆叠130和环形流体控制装置132的各种闸板和阀的操作状态(例如,位置)。示意图730的各部分(例如,流体阀、闸板)可更改位置和/或颜色以向井场操作员195指示这种井场装备的操作状态(例如,位置)。主要操作状态区域716还可在与井场装备的示意图730关联地定位的文本框732内显示指示井场装备的操作状态的传感器信号或信息。次要操作状态区域718可显示与钻井操作有关的信息和/或与WC系统315的操作状态有关的另外的信息,诸如未在主要操作状态区域716中显示的另外的信息。如上所述,描述区域720可显示指示操作事件的信息。然而,描述区域720可同样或者替代地显示与起下钻、钻井或其他井场施工操作有关的工作计划。示出BOP装备130、132或WC系统315的另一个部分的实时视图的PIP视频窗口722可显示在主要操作状态区域716或WC系统状态屏幕706的另一个区域中。
图22是根据本公开的一个或多个方面的系统(或处理装置)800的示例性实现方式的至少一部分的示意图。系统800可形成在井施工系统100、200处使用的一个或多个电子装置的至少一部分。例如,系统800可以是或形成处理装置188、192、456以及控制工作站450、452、454、500的至少一部分。系统800可形成控制系统300的至少一部分,包括井场计算资源环境305、协调控制装置304、监控系统307、本地控制器341-346、现场用户装置302和非现场用户装置303。以下描述共同参考图1至图7和图22。
井施工系统100、200还包括在井施工系统100、200的各个位置处设置或使用的固定和/或移动摄像机198。摄像机198捕获井施工系统100、200的各个部分、装备或子系统的视频,并且可能捕获井场操作员195以及他们在井场操作期间或以其他方式与井场操作关联地执行的动作,包括在对井施工系统100、200执行维修时执行的动作。例如,摄像机198可捕获整个井施工系统100、200的数字图像(或视频帧)和/或井施工系统100、200的具体部分,诸如顶驱116、RN 151、TDA 202、FIB 166、立根盒164、猫道131和/或管件111通过其在井施工系统100、200的部件之间传送的区域等其他实例。摄像机198生成包括或以其他方式指示所捕获的数字图像的对应的视频信号(即,反馈)。摄像机198可与处理装置192信号通信,诸如可允许视频信号被处理并发射到控制工作站197,并且因此允许井场操作员195在输出装置196中的一者或多者上查看井施工系统100、200的各个部分或部件。处理装置192或控制工作站197的另一个部分可操作以记录由摄像机198生成的视频信号。
系统800可包括电子互连多个钻井/分析设备和/或用于至少部分地使这种设备自动化的控制机构的网络环900。在网络环900上,可存在多个环形网络节点801,所述多个环形网络节点将井施工系统100、200或控制系统300的各个元件彼此电连接。例如,第一控制工作站850(例如,其可包括或者可以是图5和图6所示的第一控制工作站450和/或图7所示的井场操作员控制工作站500)和任选地第二控制工作站852(例如,其可包括或者可以是图5和图6所示的第二控制工作站452和/或图7所示的井场操作员控制工作站500)可通过多个环形网络节点801中的一者或多者电连接到网络环900。任选地,网络环900可通过一个或多个环形网络节点801与包括一个或多个电话线的电话系统电互连。例如,在图22中展示了五个VOIP(互联网协议语音)线881-885,但是可存在更多或更少的电话线来适应各种数量的用户、工作站等。
可编程逻辑控制器(PLC)901、911、921、931、941、951、961、971、981、991也各自通过对应的环形网络节点801连接到网络环900,因此促进了第一控制工作站850和第二控制工作站852与井施工和/或控制子系统(例如,尤其是RC子系统311、FC子系统312、MPDC子系统313、CPC子系统314、WC子系统315和CCTV子系统316)之间的通信。每个PLC 901、911、921、931、941、951、961、971、981、991均可电连接到其自己的子系统网络环909、919、929、939、949、959、969、979、989、999,子系统网络环中的每一个都通过子系统环形网络节点809、819、829、839、849、859、869、879、889、899电连接到其对应的PLC和/或电连接到一个或多个其他装备件。例如,可编程逻辑子系统控制器、处理装置和/或传感器902、903、904、905可各自通过对应的子系统环形网络节点809电连接到子系统网络环909,所述子系统网络环也通过其自己的子系统环形网络节点809电连接到PLC 901,从而形成环形网子系统。虽然四个PLC/传感器/处理装置902-905被展示为通过图22中的子系统网络环909连接到PLC 901,但是应当理解,可将更多或更少的这种装置电连接到其上和/或在给定的环形网络子系统中可能存在电连接到其上的多于一类的这种装置。类似的环形网络子系统在图22中被示出为连接到网络环900,每个环形网络子系统经由对应的环形网络节点801通过对应的子系统环形网络节点819、829、839、849,859、869、879、889、899经由其对应的子系统网络环919、929、939、949、959、969、979、989、999电连接另外的PLC 911、921、931、941、951、961、971、981、991和另外的PLC/传感器/处理装置912-915、922-925、932-935、942-945、952-955、962-965、972-975、982-924、992-995。再次,尽管在图22中四个工作站992-995被展示为通过子系统网络环999连接到PLC 991,并且尽管三个相机982-984被展示为通过子系统网络环989连接到PLC 981,但是应当理解,可将更多或更少的这种装置电连接到其上和/或在任何给定的环形网络子系统中可能存在电连接到其上的多于一类的这种装置。
图23是根据本公开的一个或多个方面的处理装置1000的示例性实现方式的至少一部分的示意图。在井施工系统100、200处利用的一个或多个电子装置可各自是、包括处理装置1000的至少一部分或由所述处理装置的至少一部分形成。例如,处理装置188、192、456、BOP控制站470、控制工作站450、452、454、500、850、852、992和CPU 901-981可各自是、包括处理装置1000的一个实例的至少一部分或由所述处理装置的一个实例的至少一部分形成。处理装置1000的实例或其部分可形成控制系统300的至少一部分,包括井场计算资源环境305、协调控制装置304、监控系统307、本地控制器341-346、现场用户装置302和非现场用户装置303。
处理装置1000可与子系统311-316和/或井施工系统100、200的其他部分的各种传感器、致动器、控制器和其他装置通信。处理装置1000可能够操作以通过井场控制工作站500、850、852从井场操作员195接收编码指令1032以及由传感器321-326生成的传感器数据351-356,处理编码指令1032和传感器数据351-356,并且将控制数据361-366传达到本地控制器341-346和/或子系统311-316的致动器331-336以执行编码指令1032,以实现本文所述的一个或多个示例性方法和/或操作的至少一部分和/或以实现本文所述的示例性系统中的一者或多者的至少一部分。
处理装置1000可以是或包括例如一个或多个处理器、专用计算装置、服务器、个人计算机(例如台式计算机、膝上型计算机和/或平板计算机)、个人数字助理、智能手机、互联网电器和/或其他类型的计算装置。处理装置1000可包括处理器1012,诸如通用可编程处理器。处理器1012可包括本地存储器1014,并且可执行存在于本地存储器1014和/或另一个存储器装置中的编码指令1032。处理器1012除其他事项外可执行机器可读编码指令1032和/或用于实现本文所述的示例性方法和/或操作的其他指令和/或程序。存储在本地存储器1014中的程序可包括程序指令或计算机程序代码,其在由处理装置1000的处理器1012执行时可致使井施工系统100、200的子系统311-316和/或单个井场设备件执行本文所述的示例性方法和/或操作。处理器1012可以是、包括适合于本地应用环境的各种类型的一个或多个处理器或由其实现,并且作为非限制性实例可包括通用计算机、专用计算机、微处理器、数字信号处理器(DSP)、现场可编程门阵列(FPGA)、专用集成电路(ASIC)和基于多核处理器架构的处理器中的一者或多者。当然,来自其他族的其他处理器也适用。
处理器1012可以可能通过总线1022和/或其他通信装置与主存储器1016(诸如可包括易失性存储器1018和非易失性存储器1020)通信。易失性存储器1018可以是、包括随机存取存储器(RAM)、静态随机存取存储器(SRAM)、同步动态随机存取存储器(SDRAM)、动态随机存取存储器(DRAM)、RAMBUS动态随机存取存储器(RDRAM)和/或其他类型的随机存取存储器装置或由其实现。非易失性存储器1020可以是、包括只读存储器、闪存存储器和/或其他类型的存储器装置或由其实现。一个或多个存储器控制器(未示出)可控制对易失性存储器1018和/或非易失性存储器1020的访问。
处理装置1000还可包括接口电路1024。接口电路1024可以是、包括各种类型的标准接口或由其实现,所述各种类型的标准接口诸如以太网接口、通用串行总线(USB)、第三代输入/输出(3GIO)接口、无线接口、蜂窝接口和/或卫星接口等。接口电路1024还可包括图形驱动器卡。接口电路1024还可包括通信装置,诸如用于促进通过网络(例如,以太网连接、数字用户线(DSL)、电话线、同轴电缆、蜂窝电话系统、卫星等)与外部计算装置的数据交换的调制解调器或网络接口卡。本地控制器341-346、传感器321-326和致动器331-336中的一者或多者可通过接口电路1024与处理装置1000连接,诸如可促进处理装置1000与本地控制器341-346、传感器321-326和/或致动器331-336之间的通信。
一个或多个输入装置1026也可连接到接口电路1024。输入装置1026可允许井场操作员195输入编码指令1032,诸如控制命令、处理例程和/或操作设置和设定点。输入装置1026可以是、包括键盘、鼠标、操纵杆、触摸屏、跟踪板、轨迹球、等位点和或语音识别系统等其他实例或由其实现。一个或多个输出装置1028也可连接到接口电路1024。输出装置1028可以是、包括视频输出装置(例如,LCD、LED显示器、触摸屏等)、打印机和/或扬声器等其他实例或由其实现。处理装置1000还可与一个或多个海量存储装置1030和/或可移动存储介质1034通信,诸如可以是或包括软盘驱动器、硬盘驱动器、光盘(CD)驱动器、数字通用光盘(DVD)驱动器和/或USB和/或其他闪存驱动器等其他实例。
编码指令1032可存储在海量存储装置1030、主存储器1016、本地存储器1014和/或可移动存储介质1034中。因此,处理装置1000可根据硬件来实现(也许在包括集成电路(诸如,ASIC)的一个或多个芯片中实现),或者可被实现为用于由处理器1012执行的软件或固件。在固件或软件的情况下,所述实现方式可被提供为计算机程序产品,所述计算机程序产品包括在其上体现供处理器1012执行的计算机程序代码(即,软件或固件)的非暂时性计算机可读介质或存储结构。编码指令1032可包括程序指令或计算机程序代码,其在由处理器1012执行时可致使井施工系统100、200的各个子系统311-316或单个井场装备件执行本文所公开的预期的方法、过程和/或操作。
在下文所述的示例性操作顺序中,除本公开的范围内的其他事项外,可通过施工程序自动操作管操纵装备,并且可由一个或多个相关联的工作站450、452、454处的一个或两个操作员195自动控制管操纵装备的步骤执行。施工程序还可能具有可配置的步骤确认特征。可随时停止或中断由施工程序控制的每个顺序,并且可由一个或多个相关联的工作站450、452、454处的一个或两个操作员195手动操作一些或所有功能。
可利用上述方面的不同组合来执行各种井施工操作。例如,当要执行下钻操作时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如下文在表1A中列出的实例。
表1A:下钻准备
然后可针对下钻顺序设置井施工系统100、200。这种设置的实例可如下文在表1B中所列出的。
表1B:下钻设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。下钻顺序以顶驱116处于较低位置开始,其中吊卡129闭合,卡瓦161闭合,并且钻柱120的一部分(例如,约一米)(称为“伸出部分”)突出到卡瓦161上方。TDA 202(并且可能LSA 228)已将管件111从THP 207提升到MOH 204上方的伸出水平高度。THP 207是空的,并且UTC 242和LTC 244打开并回缩。TBR 254和SGA 262也可能是空的,并且可能正在移动以从竖直管架组件165上提新的管件111。然后顶驱吊卡129打开,并从伸出高度回缩。
然后,通过DW 119的操作将顶驱116移动到上止点。然后,TDA 202(可能与LSA 228协作)将新的管件111移动到井中心203(WC)之上。RN 151也朝向WC 203移动。在此时间期间,TBR 254和SGA 262操作以从立根盒164和FIB 166移除另一个管件111。可自动地或通过来自控制工作站450、452、454处的操作员195的输入来选择从其移除此另外的管件111的位置。例如,就坐于在控制工作站450处的“管操纵器”操作员195通常可控制/监测管操纵装备(例如,操纵未连接到钻柱120的管件111的装备),而就坐于控制工作站452处的“钻工”操作员195通常可控制/监测其余装备(或至少是操纵钻柱120的装备)。
然后,TBR 254和SGA 262协作以将当前保持的管件111移动到THP 207。然后,UTC242和LTC 244闭合以保持新的管件111。丝扣油涂抹器209可被集成在THP 207中或以其他方式与THP 207关联,然后可对新的管件111的公扣端进行清洗和丝扣油涂抹。然后,TBR254和SGA 262可返回以从竖直管架组件中选择下一个管件111。
RN 151的对扣引鞋和/或备份钳(BUT)可然后闭合以辅助对扣。然后,TDA 202降低新的管件111以对扣到伸出部分中,在对扣之后可能继续行进较短距离(例如,约一米)以为顶驱吊卡129提供空间。然后,LSA 228可打开并从WC 203回缩。然后,RN 151执行低扭矩旋扣并随后执行高扭矩“扳紧”,以将管件111上扣到钻柱120。
在此时间期间被起重到大体上靠近新的管件111的顶端的高度的顶驱116然后延伸到WC 203并且使围绕新的管件111的吊卡129闭合。同时,TDA 202和(也许)LSA 228为下一个管件111移动到THP 207,并且RN 151打开并且远离WC 203回缩到备用位置。
然后,DW119提升顶驱116,以上提现已延伸的钻柱120并打开卡瓦161,然后降低顶部116,以将钻柱120降低到井筒102中。卡瓦161再次闭合,以为下一个管件111准备好留出伸出部分。在钻柱120下降到井筒中的这段时间期间,TDA202和(也许)LSA228延伸并闩锁到当前在THP207中的另一个新的管件111上,并且然后UTC242和LTC244并打开并回缩。可能由LSA228引导,新的管件111从立根盒水平高度提升到钻井(钻机)台水平高度(例如,约9米)。新的管件111的母扣(顶)端可由另一个清洗/丝扣油涂抹装置(如果已选择的话)进行丝扣油涂抹。
在下面列出的表1C中概述了此下钻顺序。
表1C:下钻操作
当要执行起钻操作时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如上文在表1A中列出的实例。然后可针对起钻顺序设置井施工系统100、200。这种设置的实例可如下文在表2A中所列出的。
表2A:起钻设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性起钻顺序可以TD 116在WC 203上方的较低位置开始,其中卡瓦161和吊卡129闭合,并且具有约一米的伸出部分。TDA 202和LSA228在THP位置207(从WC 203递送到THP 207的管件111)打开。UTC 242和LTC 244在THP 207中的管件111上闭合。TBR 254和SGA 262在从FIB 166前往获取THP 207中的新的管件111的途中是空的。起钻顺序的示例性步骤可如下文在表2B中所列出的。
表2B:起钻操作
当要进行钻井连接时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如上文在表1A中列出的实例。然后可针对进行钻井连接设置井施工系统100、200。这种设置的实例可如下文在表3A中所列出的。
表3A:钻井连接设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。根据钻井程序执行,示例性钻井连接顺序可开始于钻柱120一直向下钻探、划眼、勘测、升/降重量等。将有待添加到钻柱120和TDA 202/LSA 228中的管件111从伸出水平高度提升到MOH 204上方。THP 207是空的,并且UTC 242和LTC 244打开并回缩。TBR 254和SGA 262在从FIB 166前往获取新的管件111的途中是空的。钻井连接顺序的示例性步骤可如下文在表3B中所列出的。
表3B:钻井连接操作
请注意,上文所列出的示例性钻井连接顺序描述了在上扣期间用作TD 116的BUT的RN 151和THT以及用RN 151上紧下部连接以及用TD 116上紧下部连接的选项。
上述各方面的不同组合也可用于建造两个或更多个管件111的立根。这种立根建造可在于WC 203处执行的钻井以及其他操作期间执行。但是,要协调这类同时进行的操作,以避免不同机器和系统之间的冲突和障碍。例如,TDA 202的吊卡可具有两种不同大小的插入件,以允许在钻井时建造套管立根。可远离管操纵器的工作站450(或452或454)完成头大小的更改。当要执行立根建造操作时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如下文在表4A中列出的实例。
表4A:立根建造准备
然后可针对立根建造操作设置井施工系统100、200。这种设置的实例可如下文在表4B中所列出的。
表4B:立根建造设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性立根建造顺序可开始于MOH 204和THP 207为空,ITC 236回缩以及CW 131进料台预装载有管件(可能已进行清洗和丝扣油涂抹)。立根建造顺序的示例性步骤可如下文在表4C中所列出的。在这种实例中,除本公开的范围内的其他事项外,可通过施工程序自动操作管操纵装备,并且可由一个或多个相关联的工作站450、452、454处的一个或两个操作员195自动控制管操纵装备的步骤执行。施工程序还可能具有可配置的步骤确认特征。可随时停止或中断由施工程序控制的立根建造顺序,并且可由一个或多个相关联的工作站450、452、454处的一个或两个操作员195手动操作一些或所有功能。
表4C:立根建造操作
为了放下立根(离线),钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如上文在表4A中列出的实例。然后可针对执行放下操作设置井施工系统100、200。这种设置的实例可如下文在表5A中所列出的。
表5A:立根放下设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性立根放下顺序可开始于所有机器都为空,ITC 236回缩,并且CW131FT为空并准备好接收单个管件111。立根放下顺序的示例性步骤可如下文在表5B中所列出的。
表5B:立根放下操作
上述各方面的不同组合也可以用于在组装成两个或更多个管件的立根之前上提单个管件111。这种操作可在于WC 203处执行的钻井以及其他操作期间执行。但是,要协调这类同时进行的操作,以避免不同机器和系统之间的冲突和障碍。上提单个管件111的准备可包括下文在表6A中所列出的实例。
表6A:单根上提准备
然后可针对上提操作设置井施工系统100、200。这种设置的实例可如下文在表6B中所列出的。
表6B:单根上提设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性单根上提顺序可开始于WC 203处的伸出部分,并且CW 131FT预装载有管件111(可能已进行清洗和丝扣油涂抹)。立根建造顺序的示例性步骤可如下文在表6C中所列出的。
表6C:单根上提操作
上述各方面的不同组合也可用于使用顶驱116从WC 203放下单个管件111。这种操作可在于WC 203处执行的钻井以及其他操作期间执行。但是,要协调这类同时进行的操作,以避免不同机器和系统之间的冲突和障碍。此放下操作的准备可包括下文在表7A中所列出的实例。
表7A:使用TD进行的从WC到CW的单根放下的准备
然后可针对上提操作设置井施工系统100、200。这种设置的实例可如下文在表7B中所列出的。
表7B:使用TD进行的从WC到CW的单根放下的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。此顺序可开始于顶驱116在WC 203处在较低位置,其中吊卡129闭合,其中卡瓦161闭合,并且其中猫道坡道149是空的并且处于钻台114装载位置(准备好移动到钻台114)。猫道进料台可卸载并准备好接收管件111,并且TDA 202可停在潜在的碰撞区域的外部。顺序的示例性步骤可如下文在表7C中所列出的。
表7C:使用TD进行的从WC到CW的单根放下的设置顺序
上述各方面的不同组合也可用于用套管钳(CTO)使套管从CW 131运行。这种操作的准备可包括下文在表8A中所列出的实例。
表8A:使用CTO使套管从CW运行的准备
然后可针对操作设置井施工系统100、200。这种设置的实例可如下文在表8B中所列出的。
表8B:使用CTO使套管从CW运行的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。此顺序的实例可开始于套管在WC 203处伸出,其中卡瓦161和TD 116吊卡129已闭合。可在CW 131的套管侧(例如钻工的一侧)布置已进行清洗、丝扣油涂抹和计数的套管,并且移除保护器。猫道坡道149可以是空的并且处于装载位置。顺序的示例性步骤可如下文在表8C中所列出的。
表8C:使用CTO使套管从CW运行的顺序
当要执行“湿”(当钻柱120充满泥浆时)起钻操作时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如下文在表9A中列出的实例。
表9A:湿下钻准备
然后可针对湿起钻顺序设置井施工系统100、200。这种设置的实例可如下文在表9B中所列出的。
表9B:湿起钻设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性湿起钻顺序可以TD 116在WC 203上方的较低位置开始,其中卡瓦161和吊卡129闭合,并且具有约一米的伸出部分。TDA 202和LSA 228在THP 207位置(从WC 203递送到THP 207的管件111)打开。UTC 242和LTC 244在THP 207中的管件111上闭合,并且ITC 236打开并回缩。TBR 254和SGA 262在从FIB 166前往获取THP 207中的新的管件111的途中是空的。湿起钻顺序的示例性步骤可如下文在表9C中所列出的。
表9C:湿起钻操作
当要执行倒划眼操作时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如上文在表9A中列出的实例。然后可针对倒划眼顺序设置井施工系统100、200。这种设置的实例可如下文在表10A中所列出的。
表10A:倒划眼设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性的倒划眼顺序可开始于顶驱116处于较低位置并回缩(吊卡吊环为竖直),卡瓦161闭合,并且TDA 202和LSA 228在THP 207中打开。UTC 242和LTC 244可在THP 207中的管件111上闭合,其中ITC 236打开并回缩,并且TBR254和SGA 262(在从FIB 166前往获取THP 207中的下一个管件111的途中)是空的。倒划眼顺序的示例性步骤可如下文在表10B中所列出的。
表10B:倒划眼操作
对于下入钻铤立根,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如下文在表11A中列出的实例。
表11A:起出钻铤立根的准备
然后可针对下钻顺序设置井施工系统100、200。这种设置的实例可如下文在表11B中所列出的。
表11B:下入钻铤立根的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。下入钻铤立根的顺序可开始于钻铤立根111在WC 203处伸出,其中顶驱116吊卡129在伸出部分上闭合并且卡瓦161已闭合。UTC 242和LTC 244可在THP 207中的另一个钻铤立根111上闭合,其中公扣的清洗和丝扣油涂抹已完成。TDA 202、LSA 228、TBR 254和SGA 262可以各自是空的。钻铤立根下钻顺序的示例性步骤可如下文在表11C中所列出的。
表11C:下入钻铤立根操作
上述各方面的不同组合也可用于利用TDA 202和下套管工具(CRT)使套管从CW131运行。这种操作的准备可包括下文在表12A中所列出的实例。
表12A:使用TDA和CRT使套管从CW运行的准备
然后可针对操作设置井施工系统100、200。这种设置的实例可如下文在表12B中所列出的。
表12B:使用TDA和CRT使套管从CW运行的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。此顺序的实例可开始于套管在WC 203处伸出,其中卡瓦161已闭合并且CRT已接合。可在CW 131的套管侧(例如钻工的一侧)布置已进行清洗、丝扣油涂抹和计数的套管,并且移除保护器。TDA 202和LSA228可将套管111保持在钻台114的备用位置。顺序的示例性步骤可如下文在表12C中所列出的。
表12C:使用CTO使套管从CW运行的顺序
上述各方面的不同组合也可用于建造两个或更多个套管单根的立根。这种套管立根建造可在于WC 203处执行的钻井以及其他操作期间执行。但是,要协调这类同时进行的操作,以避免不同机器和系统之间的冲突和障碍。例如,TDA 202的吊卡可具有两种不同大小的插入件,以允许在钻井时建造套管立根。可远离管操纵器的工作站450(或452或454)完成头大小的更改。当要执行套管立根建造操作时,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如下文在表13A中列出的实例。
表13A:套管立根建造准备
然后可针对套管立根建造操作设置井施工系统100、200。这种设置的实例可如下文在表13B中所列出的。
表13B:套管立根建造设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。示例性套管立根建造顺序可开始于MOH 204和THP 207为空,ITC 236回缩以及CW 131进料台预装载有套管单根(可能已进行清洗和丝扣油涂抹)。套管立根建造顺序的示例性步骤可如下文在表13C中所列出的。在这种实例中,除本公开的范围内的其他事项外,可通过施工程序自动操作管操纵装备,并且可由一个或多个相关联的工作站450、452、454处的一个或两个操作员195自动控制管操纵装备的步骤执行。施工程序还可能具有可配置的步骤确认特征。可随时停止或中断由施工程序控制的套管立根建造顺序,并且可由一个或多个相关联的工作站450、452、454处的一个或两个操作员195手动操作一些或所有功能。
表13C:套管立根建造操作
对于在不用CRT的情况下下入套管立根,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如下文在表14A中列出的实例。
表14A:在没有CRT的情况下下入套管立根的准备
然后可针对非CRT套管立根下钻顺序设置井施工系统100、200。这种设置的实例可如下文在表14B中所列出的。
表14B:在没有CRT的情况下下入套管立根的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。对套管立根进行非CRT下钻的顺序可开始于顶驱116在WC 203处的下部位置,其中卡瓦161围绕约一米的套管伸出部分闭合。另一个套管立根111可能在TDA 202/LSA 228中,从THP 207提升到MOH 204上方的伸出水平高度,其中TDA 202吊卡面向顶驱116。THP 207、UTC 242和LTC 244可已打开并回缩。TBR 254和SGA262可能(例如,在从FIB 166前往上提新的套管立根的途中)是空的。对套管立根进行非CRT下钻的顺序的示例性步骤可如下文在表14C中所列出的。
表14C:在无CRT操作的情况下下入套管立根
上述各方面的不同组合也可用于使用顶驱116和CRT使大直径套管(LDC)从CW 131运行。例如,LDC可具有约13.375英寸(约34厘米)或更大的外径。这种操作的准备可包括下文在表15A中所列出的实例。
表15A:使用TD和CRT使LDC从CW运行的准备
然后可针对操作设置井施工系统100、200。这种设置的实例可如下文在表8B中所列出的。
表15B:使用TD和CRT使LDC从CW运行的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。此顺序的实例可开始于套管在WC 203处伸出(例如,约1.5米),其中卡瓦161已闭合并且CRT已接合。可在CW 131的套管侧(例如钻工的一侧)布置已进行清洗、丝扣油涂抹和计数的套管,并且移除保护器。猫道坡道149可装载有套管。TDA 202可停放在碰撞区域之外(例如,桅型井架的顶部),并且LSA 228可准备就绪。顺序的示例性步骤可如下文在表15C中所列出的。
表15C:使用TD和CRT使LDC从CW运行的顺序
对于起出钻铤立根,钻台114上的操作员195可确认各种装备件已正确关闭并锁定,并且然后可能执行其他准备,诸如上文在表11A中列出的实例。然后可针对钻铤立根起钻顺序设置井施工系统100、200。这种设置的实例可如下文在表16A中所列出的。
表16A:起出钻铤立根的设置
在这种准备和设置之后,操作员195可腾出钻台114,并且装备可被配置为准备好进行远程控制(例如,通过停用紧急停止功能)。起出钻铤立根的顺序可开始于钻铤立根111在WC 203处伸出,其中顶驱116吊卡129在伸出部分上闭合并且卡瓦161已闭合。UTC 242和LTC 244可在THP 207中的另一个钻铤立根111上闭合,其中公扣的清洗和丝扣油涂抹已完成。TDA 202可停放在碰撞区域之外,并且LSA 228、TBR 254和SGA 262可各自是空的。钻铤立根起钻顺序的示例性步骤可如下文在表16B中所列出的。
表16B:起出钻铤立根操作
上文顺序中提及的区管理系统(ZMS)为IWCS的每个物理部件限定将避免碰撞的区。所述区是根据IWCS共同的坐标系限定的三维空间。每个区与一个或多个不同的装备件有关,包括作为IWCS的一部分而固定的那些结构或部件。所述区附接到装备并随装备一起行进。区的大小可根据相关装备的运输速度或周围装备的运输速度而更改(扩大或缩小)。一些机械和装备足够复杂,以有必要使用机械内的多个区,并且ZMS维护与不同子部件的区有关的信息。ZMS监测区以防止碰撞。
图24描绘了作为ZMS的主题的部件1140。部件1140可以是IWCS的任何部件。部件1140具有区1141,其至少部分地包封部件1140。区1141可大于部件1140,使得在部件1140的端与区1141之间形成缓冲区,以进一步帮助避免部件之间的碰撞。数据库1142存储由ZMS跟踪的部件的特性。数据库1142可存储与位置、大小、形状、重量、运动路径、公差、撞击灵敏度、基准点、质心1143和附接点有关的信息。ZMS的处理系统1144可执行逻辑和计算。处理系统1144可以是图23中所示的处理系统1000的实例。
部件1140的位置可根据相对于一个或多个坐标系的坐标表示。每个坐标系可以是x-y-z系、极坐标系或另一类型的坐标系。坐标系可以任何任意点为中心,所述任意点诸如钻台114(图1)的西北极端或井中心与钻台114的交点等其他实例。监测部件1140的位置,并将其与IWCS的其他相关部件的位置进行连续比较。部件的位置信息以及部件的大小和/或形状信息可用于与IWCS的其他部件相关地描述三维坐标系空间中的装备及其相关联的区。ZMS系统可以检测到两个或更多个部件之间的碰撞何时即将来临,并且因此发出警告或采取动作以防止碰撞。
部件大小由数据库1142存储,以帮助计算区1141。数据库1142可以是图23中所示的处理系统1000的实例的至少一部分。数据库1142可根据部件1140的各个端处的坐标来存储部件1140的大小。如果部件1140具有大体上立方体的形状,则大小可通过立方体的边缘和取向或其他坐标系来描述。如果部件1140的形状更复杂,则可使用更多坐标来限定大小和形状。每个部件1140的大小和/或形状信息用于限定相关联的区1141的对应的大小和/或形状。区1141可完全包封物理部件1140,或者可仅涵盖物理部件1140的一部分,所述部分可与其他部件1140发生碰撞。区1141的大小也可沿与该部件1140的移动对准的方向和/或沿另一个接近部件1140的方向扩大。这种扩大的程度可取决于一个或多个移动部件1140的速度。
数据库1142还跟踪部件1140的重量,ZMS可使用所述重量来确定移动或停止部件1140的运动所需要的力的大小。部件1140的重量可以是已知的,诸如在顺序设置期间输入时,而在其他情况下,IWCS可包括被配置为确定部件140的重量的传感器。例如,如果部件1140是连接到钻柱120的顶驱116,则部件1140的重量根据钻柱120的长度和其他参数而变化。传感器可执行重量测量以确定需要的重量。
IWCS的各个部件1140的位置不时变化。每个不仅1140的运动路径也可由数据库1142存储。部件1140的运动路径可以是完整的路径,诸如当部件1140可从一个位置行进到另一个位置时。替代地,部件1140的运动路径可仅仅是部件1140可行进的方向,而没有限定的端点。数据库1142可存储部件1140的例行运动路径。例如,铁钻工151具有在回缩位置与展开位置之间的移动路径。路径的轨迹可提前知道。ZMS处理系统1144可被告知给定部件1140的提议的运动路径,并且可计算部件1140是否可在提议的时间进行提议的移动而不与IWCS的另一个部件的区相交。如果是,则ZMS处理系统1144批准所述移动。替代地,当命令部件1140沿特定方向移动时,与部件1140相关联的区1141可沿预期移动的方向扩大。区1141扩大的程度可能取决于相关联的部件1140的速度。利用部件1140的扩大区1141,ZMS处理系统1144可以计算扩大区1141是否可与IWCS的另一个部件1140的区1141相交。如果否,则ZMS处理系统1144批准所述移动。另外,当命令部件1140沿特定方向移动时,与可能与移动部件1140形成接触的周围部件1140相关联的区1141可沿到来的部件1140的方向扩大。区1141扩大的程度可取决于到来的部件1140的速度。ZMS处理系统1144可执行类似的计算,以评估是否可能发生区1141相交并且做出相应的反应。部件1140的移动可在施工程序的指导和控制下进行,因此由施工程序控制的动作可能要经过ZMS处理系统1144的批准以防止部件1140之间发生碰撞。
一个或多个便携式部件的移动可能是非计划的。便携式部件是不作为IWCS装备的一部分的对象,但在操作期间可能存在。例如,钻台114上的人类操作员195可以是便携式对象。ZMS处理系统1144被配备来检测和监测便携式部件的非计划移动。例如,上述各种相机、传感器和其他测量装备可用于识别便携式部件并检测其移动。ZMS处理系统1144可建立与便携式部件相关联的区,评估其与周围装备发生碰撞的风险,并发出警告和/或采取动作以防止碰撞。ZMS处理系统1144可把其他部件1140移开,或者可停止其他部件1140的移动,以避免碰撞。ZMS处理系统1144还可计算给定碰撞的预期损坏,并且可包括用于允许ZMS处理系统1144确定在给定的一组情况下的动作过程的逻辑。例如,如果在ZMS处理系统1144检测到操作员195朝向井中心行走时顶驱116正朝着钻台114向下移动,则ZMS处理系统1144可立即在操作员195周围建立区1141,并评估此区1141是否将与同顶驱116相关联的区1141相交。根据针对操作建立的安全策略,ZMS处理系统1144可采取多种措施来避免顶驱116与操作员195之间发生碰撞,所述措施诸如触发警报、减慢顶驱116的移动和/或顶驱116的紧急停止等其他实例。
数据库1142可以存储与给定部件1140的公差有关的信息。公差可被限定为距部件1140的物理结构的边缘与限定区1141的对应边缘的距离。部件1140的性质和使用此部件的环境可在确定公差时考虑进来。通常,部件1140的速度越快,移动方向上的公差越大。替代地,到来的部件1140的速度越快,到来的部件1140的方向上的公差越大。同样可能的是,部件1140越灵敏,公差可能越大。环境的约束也可确定公差是多少。例如,如果部件1140将被安装到紧挨另一个部件的预定空间中,则可相应地调整公差,以免在安装在期望位置中时触发警报或校正动作。公差还可在移动期间更改,使得当给定部件1140静止时,公差可较小,并且当部件1140移动时,公差(以及因此的区1141)可暂时增大。
各种部件由不同的材料制成,并且一些部件比其他部件更易损。可将部件抗碰撞的性质考虑到区1141的计算中。撞击灵敏度的概念可能不只是物理撞击,并且可包括化学、热、振动和电磁接触。因此,部件1140的区1141可根据部件1140的碰撞、化学、热、振动、电磁以及其他灵敏度而增大或减小。
部件1140通常各自具有物理主体,并且为了正确地解决部件1140的位置及其与其他部件的接近度,可给予部件1140一个基准点,并且部件1140的尺寸可参考基准点进行限定。基准点可任意选择,或者其可具有一定的重要性。例如,基准点可与部件1140上的质心1143、重要角、边缘或另一个重要点重合。如果部件1140进行例行旋转,则部件1140的基准点和几何形状可在其在维修期间旋转时被更新。与所述部件有关的区1141也可相应地更新。一些部件1140具有附接点,诸如钩、轨道、滑道、孔眼、螺栓形式或其他物理连接点。此信息也可存储在数据库1142中以允许操纵部件。在即将发生的碰撞的情况下,关于附接点位置的信息可能证明是有用的,并且可确定采取了什么动作过程来防止或减轻碰撞。另一种类型的附接点是端口,诸如阀门、电气插座/端口等。知道这些附接点和端口的位置和存在也可证明是有用的,并且可确定本公开的系统和方法采取的动作。
不同优先级可与不同部件1140相关联。可给予每个部件1140相对于其他部件的优先级,并且如果存在两个竞争的移动提议,则可给予较高的优先级绿灯,而较低优先级的部件将必须等待或寻找另一个移动路径。较高优先级的部件可称为命令部件,而较低的部件可称为较低的部件或从属部件。
根据本公开的钻机控制系统(其可与图22所示的系统800相似或相同)可包括:通信网络(例如,来自图22的环形网络900);直接连接到通信网络的控制工作站(例如,来自图22的一个或多个控制工作站850和/或852);各自直接连接到通信网络的多个控制装置,所述控制装置中的至少一些(可能每一者)可包括或可以是计算机(PC或IPC)和/或可编程逻辑控制器(PLC)(例如,来自图22的PLC 901、911、921、931、941、951、961、971、981、991);各自通过多个控制装置中的对应的控制装置连接到通信网络的多个本地控制网络(例如,来自图22的子系统网络环909、919、929、939、949、959、969、979、989、999);以及多个本地控制装置,所述本地控制装置中的至少一些(并且可能每一者)可包括或可以是计算机(PC或IPC)和/或可编程逻辑控制器(PLC)(例如,来自图22的装置902-905、912-915、922-925、932-935、942-945、952-955、962-965、972-975、982-984、992-995),并且所述本地控制装置中的每一者(例如,直接)连接到多个本地控制网络中的对应的本地控制网络(在这种情况下,每个本地控制网络都间接连接到较大的通信网络)。通信网络可包括或者可以是单环、星形或菊花链网络,并且/或者可以是光纤的。多个控制装置中的每一者都可执行、被致使执行、感测、测量、监测、记录地面或井下部件(或其组)、子系统(或其组)和/或系统(或其组)的动作(例如,机械、软件或其他动作)和/或类似地执行所述动作。借助于它们通过通信网络的连接,多个控制装置中的每一者可直接或间接地与多个控制装置彼此通信。在有利的实施方案中,通信网络被配置成使得多个控制装置(和/或多个本地控制装置)可(并且在一些实施方案中确实)执行包括在各个工具/装备和/或由钻机控制系统控制的各个子系统阵列的直接操作中的基本上所有控制逻辑,而控制工作站例如通过包括操作参数和/或多工具/多子系统任务、基本上由上述项组成或作为操作参数和/或多工具/多子系统任务的用户输入数据大体上与多个控制装置(和/或通过多个本地控制网络)、与多个本地控制装置并因此最终与钻机控制系统控制的各种工具/装备/子系统交换包括用户输入数据、作为用户输入数据和/或从用户输入数据导出的数据。
在此实施方案或另一个实施方案中,或者作为独立实施方案,根据本公开的随钻分析(AWD)控制系统(其可与图22所示的系统800相似或相同)可能够操作以显示和/或利用可由和/或已经由用户输入和/或可通过和/或已通过一种或多种算法(例如,基于可由或已由用户输入的参数)计算出的多个钻井相关参数。AWD控制系统可以利用钻井相关参数作为输入数据,所述钻井相关参数涉及井配置、钻柱(包括BHA)配置、钻井相关传感器数据/参数(例如,泥坑液位传感器、立管压力传感器、泥浆流量传感器等)和钻井装备数据/参数(例如,直接来自对应的装备,诸如钻柱每分钟转数(RPM)、上扣扭矩、泥浆泵SPM等)。AWD控制系统可提供可递送到以下项和/或由其使用的输出数据:一个或多个工作站显示器(例如,包括AWD显示器);历史测井系统(例如,其可包括在诸如来自图3和图4的环境206的远程计算资源环境内和/或可通过其访问)、泥浆测井系统(例如,其可包括在诸如来自图3和图4的环境206的远程计算资源环境内和/或可通过其访问)等。AWD控制系统输出数据可包括:钻井操作警告和警报,井溢流计算器和压井记录表;用于存储在历史趋向/测井系统中的传感器数据和传感器数据计算,有关/指示预定的一组操作参数的数据/参数的动态跟踪,指示井配置的参数和/或其他信息,和/或指示钻柱(例如,包括BHA)配置的参数和/或其他信息。预定的一组操作参数可立管包括但不一定限于:井深度/形状;钻头深度;井眼中立根;分段的泥浆容积;钻柱容积、位移和重量;泥浆罐容积,包括在用罐选择和损失/增益计算信息;泥浆补给罐容积差;泥浆补给罐累积容积;泥浆泵总行程计数器(由每个泥浆泵跟踪/代表每个泥浆泵的单个行程计数);泥浆泵SPM总计;泥浆泵缸套的容量和效率的设置;泥浆流入井眼中,单个和总计;每区段的环空泥浆速度;每区段的泥浆量;每区段的总行程;每区段要经历的行程;每区段的总分钟数;每区段经历的分钟数;泥浆返回流量;钻头运行时间和转数;WOB;ROP;吊钩负荷;以及压力;等其他项。
AWD系统可操作以用于递送高质量的计算,以对复杂的钻井和起下钻参数进行实时监测和报警。来自以下来源的输入可以是AWD计算的基础:井和钻柱配置;以及钻井参数传感器,如泥坑液位传感器、立管压力传感器和泥浆流量传感器;直接来自钻井装备(诸如钻柱RPM、上扣扭矩和泥浆泵SPM)。AWD系统可将结果输出到工作站显示器(例如,操作员可在控制工作站显示器上查看的AWD显示屏幕)、历史测井系统和泥浆测井仪系统。AWD系统可直接访问所有必要的传感器信号,并且可允许操作员进行进一步的了解和理解。
AWD系统可提供对以下的确定和/或确认:井和钻柱配置;井和钻头深度的动态跟踪;井中立根;分段的泥浆容积的动态计算、钻柱容积、位移和重量;泥浆罐容积、包括在用罐选择和损失/增益计算;泥浆补给罐容积差;泥浆补给罐累积容积;泥浆泵总行程计数器(单个计数可由各个泥浆泵执行);每分钟总泥浆泵行程;泥浆泵缸套的容量和效率的设置;泥浆流入井眼中、单个和总计;每区段环空泥浆速度的动态计算;每区段泥浆量的动态计算;每区段总行程的动态计算;每区段要经历的行程的动态计算;每区段总分钟数的动态计算;每区段经历的分钟数的动态计算;泥浆返回流量;钻头运行时间和转数;WOB;ROP;吊钩负荷;立管压力;套管压力、水泥压力、用于存储在历史趋向系统中的井溢流计算器和压井记录表(例如,遵循“钻工方法”)的传感器和计算;以及操作警告和警报。
AWD系统可包含特定的WITS(井场信息传送标准)计算和触发器,其用于使用WITS0协议填充串行通信。AWD系统可为WITS记录“记录1–基于一般时间”和“记录11–泥浆罐容积–基于时间”计算数据。WITS记录“记录19–洞和钻柱”可用于配置。
AWD系统可根据由泥坑液位器械测量的液位来计算泥浆有效容积。液位传感器可连线到AWD系统,或者AWD系统可从钻井液控制系统接收液位传感器数据。操作员可选择将作为有效容积的一部分包括的在用罐。任何罐组合均可实现有效容积。一旦选择,罐将自动添加到有效容积。所有涉及有效容积的计算都将使用新值进行更新。AWD屏幕可以指示促成泥浆有效容积确定的那些罐的状态,操作员始终可查看这些状态。
AWD系统为泥浆平衡容积指示器计算数据,所述指示器显示损失/增益容积,其中箭头用于增长/降低趋势。系统损失/增益被计算为有效容积与重置值之间的变化。
AWD系统通过使用起重位置、吊钩负荷和卡瓦状态自动计算钻头和井深度。每当钻头在井中移动或加长井时,AWD系统都会自动计算井和钻头深度。更新取决于钻柱的特定重量,即,测量吊钩负荷的能力。如果钻柱的重量太低而无法获得可靠的信号,则可手动决定应更新钻头深度的时间。钻头和井深度计算器还包括一个基于输入平均立根长度的自动井眼中立根计数器。
AWD系统可具有用于深度计算的两个选项:“卡瓦”,用于在未设置卡瓦时生效以进行深度计算;以及“吊钩负荷”,用于在负荷在吊卡中时进行深度计算。
AWD系统可包括每个泥浆泵的单独SPM和行程计数器。另外,对于在用泥浆泵,可能存在多个(例如四个)独立的总行程计数器和总SPM。操作员可选择要计入有效泥浆泵的泵以用于总计数器。
AWD系统可包括监测泵送到钻柱中的泥浆流量以及泥浆返回流量。流入量的计算取决于针对各个泥浆泵设置的缸套容量和效率因数的配置。通过使用这些数据和SPM,AWD系统除了可计算泵入井中的总流量之外,还可计算每个泵中的泥浆流量。
泥浆返回流量可直接从泥浆回流传感器读取,操作员可通过传感器选择弹出菜单对其进行选择。
由于井或钻头深度随时间增加,可计算出ROP。操作员可选择将根据钻头深度还是井深度来完成ROP计算。
可将WOB计算为吊钩负荷从重置值的变化。
AWD系统可包括用于钻头转数和运行时间的计数器。这些计数器可取决于顶驱的RPM和计算出的泥浆流入量。当钻头在底部时,可完成对计数器的更新。
AWD系统可显示用于配置井和钻柱参数以及给出正在使用的当前配置的概述视图的井配置。
在AWD系统中输入的井设计包括井段的数量以及每个区段的井直径和计划长度。在AWD系统中输入的节流阀和压井管线设计可包括节流管线ID、节流管线接头ID、节流管线接头部分、节流管线长度、压井管线ID、压井管线接头ID、压井管线接头部分和压井管线长度。在AWD系统中输入的钻柱设计可能包括每个钻柱区段的尺寸和长度,包括钻柱区段的数量、计划长度、钻柱容量、钻柱钢位移、钻柱闭合位移、管件工具接头的平均长度、平均立根长度以及每个立根的工具接头的数量等其他实例。
如果发生井溢流并且必须关井并循环出溢流以重新获得对井的控制,则可使用井溢流计算器。井溢流计算器不起动任何装备、顺序或过程,并且可在任何时间或井的任何点使用。井溢流计算器的输入可包括测量的深度、真实的竖直深度、测量的鞋深度(例如,第二最低井段)、竖直鞋深度、原始泥浆重量、泄漏测试泥浆重量、泄漏测试压力、关井套管压力、关井钻管压力、井溢流增加容积、压井泵选择、压井泵容量(例如,根据泥浆泵配置计算)、压井泵速度、慢速循环率压力、安全裕度和所选择要使用的节流/压井管线等其他实例。井溢流计算器也可使用先前输入的和/或测量的参数作为柱和井的特性、隔水管尺寸以及压井和节流管线的特性。可从泥浆泵和井配置设置中收集容积、鞋和泵数据。井溢流计算器可输出初始循环压力、临时循环压力、最终循环压力、压井泥浆重量、最大泥浆重量、每100个行程的压降、流入量的梯度、流入量的高度、地面到钻头的行程和分钟数、钻头到鞋的行程和分钟数、鞋到防喷器的行程和分钟数、防喷器到节流阀的行程和分钟数以及总循行程和分钟数等其他实例。
AWD系统可以通过在下入井中的预期钻柱位移与在泥浆补给罐中测量的实际容积之间进行比较来确定泥浆补给罐的差值。钻柱位移可取决于钻柱配置和钻头深度。
AWD系统可将泥浆补给罐累积容积确定为下钻或起钻期间的泥浆总容积。储液器在填充或排空时可能冻结,从而可在不反映累积值的情况下填充或排空泥浆补给罐。
AWD显示屏幕可以图形方式动态显示已配置和已钻探的井以及钻柱。AWD显示屏幕还可动态显示不同井段的泥浆容积、行程和速度。AWD系统还可以跟踪泥浆前沿深度,其可以在井动画上以文本(例如,数字)和图形的形式显示。AWD显示屏幕可包含井配置和井段深度的图形显示、鞋的图形显示、已钻探井相对于井配置的动画、井中钻柱的动画、泥浆前沿跟踪(例如,泥浆前沿深度值和图形显示)、每个井段的环空速度、裸眼容积、以及针对地面到钻头、钻头到鞋、钻头到BOP和钻头到地面、井循环和全循环的总行程和分钟数、要经历的行程和分钟数以及容积的动态确定等其他实例。AWS显示屏幕还可显示AWD系统已经确定的其他AWD参数,诸如钻柱位移–开口端、钻柱位移–闭合端、钻柱重量、井中立根、有效容积、泥浆流入量、钻头转数和钻头运行时间等其他实例。AWD显示屏幕还可以概述配置的井段长度,并且除了以图形方式指示鞋深度之外,还可以显示每个区段的深度。如果实际井深度超过配置的井深度,则最深井段的长度可能自动更新,使得容积、时间和行程计算正确。井和钻柱动画也可更新以反映超出的井深度。
当井配置被输入到AWD系统时,井可被填充有第一颜色,并且随着钻井的进行,井动画可根据计算出的井深度相应地被填充有第二颜色。可在配置的井中以第二颜色或第三颜色以图形方式显示钻柱。钻柱的深度将指示钻头深度。
可相对于泥浆泵总行程计数器以及钻柱和井配置来计算泥浆前沿跟踪位置。可从地面或钻头跟踪泥浆前沿。当操作员选择从地面开始跟踪泥浆前沿,并且所选择总行程计数器设置为零时,图形符号可指示在将泥浆泵入井时,泥浆前沿位置从地面朝向钻柱内的钻头移动。当行程计数器超过从地面到钻头的行程数时,另一图形符号可指示从底部到地面的环空容积中的泥浆前沿位置。当泥浆前沿指示到达地面时,它可停留在地面上,直到重置所选择总行程计数器。当操作员选择从钻头(或底部)开始跟踪泥浆前沿,并且所选择总行程计数器设置为零时,图形符号可指示从钻头开始并且朝向地面移动的环空容积中的泥浆前沿位置。当泥浆前沿指示到达地面时,它可停留在地面上,直到重置所选择总行程计数器。除了泥浆前沿深度的图形显示外,还可存在示出深度的数字显示。例如,如果泥浆前沿在环空容积中朝向钻柱内部的钻头或朝向地面移动,则所述值可以是正值。
AWD系统可为井段中的每一个计算并显示具有数字显示的环空速度。如果钻柱在相同井段内具有若干外径,则计算出的速度可以是特定井段中的平均值。
AWD系统可根据当前井深度处的井配置来计算裸眼容积。
AWD系统可针对以下中的一者或多者动态计算容积、总行程、总分钟数和行程数以及要经历的分钟数:地面到钻头(钻柱容积);钻头到鞋(钻头到鞋的环空容积);钻头到地面(总环空容积);井循环(钻柱+环空容积);以及全循环(钻柱+环空容积+有效容积)。要经历的行程和分钟数可根据所选择总行程计数器的最后一次重置来计算。如果操作员选择从地面开始跟踪,则可以从对从地面起的行程进行计数开始计算要经历的行程和分钟数。如果操作员选择从底部开始跟踪,则可以从钻头位置开始计算要经历的行程和分钟数。当操作员选择从底部开始跟踪时,可将地面至钻头要经历的行程和时间设置为零。
容积计算可与井和钻柱配置以及计算出的钻头深度有关。行程计算可取决于计算出的容积和有效泥浆泵容量设置。要经历的分钟数计算可取决于所计算的容积、有效泥浆泵容量设置以及泥浆泵总SPM。
根据本公开的一个或多个方面的控制系统(其可与图22中所示的系统800相似或相同)可能够操作以监测并且至少部分地(例如,完全地)控制钻井钻机以及以下模块中的一者或多者的钻井操作:钻管下钻(具有和/或不具有钻铤立根);钻管起钻(具有和/或不具有钻铤立根);钻管连接;钻管立根建造(离线);钻管放下站(离线);套管立根建造;套管下钻;立根卸扣;从猫道运行套管;从猫道上提单根;将单根从井中心放到猫道;倒划眼;湿起下钻;正常钻井关闭;以及紧急钻井关闭(基于警报条件)。一个这种示例性模块涉及使用顶驱和下套管工具使13-3/8”套管从猫道运行。此模块顺序可开始于顶驱处于较低位置,下套管工具已接合,卡瓦闭合(例如,大约1.5米的伸出部分),猫道机器进料台装载有(经清洗的)管件,猫道机器坡道装载有套管(例如,沿向上的方向),管件递送臂停放在桅型井架的顶部中/附近以及下部稳定臂已准备就绪。然后,模块顺序可包括:(i)将下套管工具从伸出部分释放,并且将顶驱起重到上提位置;(ii)闩锁吊卡;(iii)顶驱/下部稳定臂将套管起重到井中心,并且猫道机器移动到装载位置;(iv)对扣套管;(v)在猫道机器坡道上装载另一个(例如下一个)套管;(vi)使猫道运行到钻台;(vii)接合下套管工具并上紧套管连接;(viii)打开备份钳并回缩钳操纵车;(ix)降低套管柱并打开吊卡;(x)外倾一个或多个吊卡吊环并设置卡瓦;以及(xi)根据需要任选地重复这些步骤中的一些或全部步骤以用于另外的(例如,下一个)套管。
根据本公开的一个或多个方面的钻井系统(其可与图22中所示的系统800相似或相同)可包括对装备的至少部分地(例如,完全地)自动控制,所述装备包括以下项、基本上由以下项组成或由以下项中的每一者组成:绞车;顶驱;铁钻工;泥斗;一个或多个猫头;鼠洞;包括泥浆泵的泥浆系统;猫道;指梁;竖直管操纵器;CCTV系统;隔水管张力系统;顶装式补偿器;以及任选的底部钻孔组件(BHA)。
根据本公开的一个或多个方面的控制系统(其可与图22所示的系统800相似或相同)可能够操作以用于控制钻井操作,其中自动下钻和/或自动起钻模块可能有利地比用于普通人类工作队的手动下钻和/或起钻模块更为有效。控制系统可实现以下中的一者、一些或全部:比普通人类工作队的平均下钻和/或起钻速度优/多至少5%(例如,至少6%、至少7%、至少8%、至少9%或至少10%)的自动平均下钻和/或起钻速度[以立根数/每小时计];比与普通人类工作队的平均下钻和/或起钻速度的标准偏差优/低至少50%(例如,至少55%、至少60%、至少65%、至少70%、至少75%或至少80%)的与平均下钻/起钻速度的自动标准偏差;比普通人类工作队的平均下钻和/或起钻卡瓦到卡瓦连接时间优/低至少4%(例如,至少5%、至少6%或至少7%)的自动平均下钻和/或起钻卡瓦到卡瓦连接时间[以秒计];以及比与普通人类工作队的平均下钻和/或起钻卡瓦到卡瓦连接时间的标准偏差优/低至少50%(例如,至少55%、至少60%、至少65%、至少70%、至少75%或至少80%)的与平均下钻和/或起钻卡瓦到卡瓦连接时间的自动标准偏差。
根据本公开的一个或多个方面的控制系统(其可与图22所示的系统800相似或相同)可能够操作以用于控制钻井操作,其中可避免在以下之间发生碰撞:(a)绞车与铁钻工、钳操纵车、钳操纵臂、猫道、管件递送臂、下部稳定臂和上部管件约束件中的一者或多者;(b)顶驱与铁钻工、钳操纵车、钳操纵臂、猫道、管件递送臂、下部稳定臂和上部管件约束件中的一者或多者;(c)铁钻工与绞车、顶驱、猫道、管件递送臂、下部稳定臂、中间管件约束件、旋转台、动力卡瓦、井中心连接和鼠洞连接中的一者或多者;(d)钳操纵车与绞车、顶驱、猫道、管件递送臂、下部稳定臂、旋转台、动力卡瓦和井中心连接中的一者或多者;(e)钳操纵臂与绞车、顶驱、猫道、管件递送臂、下部稳定臂、中间管件约束件、旋转台、动力卡瓦、井中心连接和鼠洞连接中的一者或多者;(f)猫道与绞车、顶驱、铁钻工、钳操纵车、钳操纵臂、管件递送臂、下部稳定臂、移送位置附近的管和鼠洞的管中的一者或多者;(g)管件递送臂与绞车、顶驱、铁钻工、钳操纵车、钳操纵臂、猫道、下部稳定臂、转移桥排管器、上部管件约束件、中间管件约束件、下部管件约束件、一个或多个立根盒引导臂、立根移送位置、旋转台和动力卡瓦中的一者或多者;(h)下部稳定臂与绞车、顶驱、铁钻工、钳操纵车、钳操纵臂、猫道、管件递送臂和中间管件约束件中的一者或多者;(i)转移桥排管器与管件递送臂、上部管件约束件、下部管件约束件、一个或多个立根盒引导臂、立根移送位置和指梁中的一者或多者;(j)上部管件约束件与绞车、顶驱、管件递送臂、转移桥排管器、下部管件约束件和一个或多个立根盒引导臂中的一者或多者;(k)中间管件约束件与铁钻工、钳操纵臂、管件递送臂、下部稳定臂和鼠洞连接中一者或多者;(l)一个或多个立根盒引导臂与管件递送臂、下部稳定臂、转移桥排管器、上部管件约束件和下部管件约束件中的一者或多者;(m)多个立根盒引导臂;(n)指梁与转移桥排管器;(o)下部管件约束件与管件递送臂、下部稳定臂、转移桥排管器、上部稳定臂和一个或多个立根盒引导臂中的一者或多者;(p)立根移送位置与管件递送臂和转移桥排管器中的一者或两者;和/或(q)旋转台/动力卡瓦与绞车、顶驱、铁钻工、钳操纵车、钳操纵臂、管件递送臂、下部稳定臂和井中心连接中的一者或多者。
根据本公开的一个或多个方面的控制系统(其可与图22中所示的系统800相似或相同)可能够操作以用于控制钻井操作,其中可通过以下方式选择用于各种钻井操作的自动化水平:生成控制屏幕,以促进自动化水平的选择;以及促进全(即基本完成)自动化、半自动化(例如,通过钻工/操作员确认以开始特定操作顺序,自动化较大的操作顺序的第一部分,诸如等待钻工/操作员对完成和/或较大操作顺序的第二部分进行授权等)或手动控制(例如,通过操纵杆)的选择。
根据本公开的一个或多个方面的控制系统(其可与图22中所示的系统800相似或相同)可能够操作以用于控制钻井操作,并且可包括在其上生成控制屏幕的可定制显示屏幕,并且所述控制屏幕可能够操作以促进可以图形方式表示钻井操作的一个或多个方面的指标图的标度和/或限制(例如,一个或多个饼图、一个或多个线性条形图、一个或多个蜘蛛图和/或类似项以及它们的组合)的选择。标度和/或限制的选择可包括但不一定限于:最小和最大图形值;警告值限制;以及图形标度。
根据本公开的一个或多个方面的控制系统(其可与图22中所示的系统800相似或相同)可能够操作以用于控制钻井操作并且可包括软件对象(例如,符号、图标、按钮和/或类似项)的显示,所述显示:可显示在监视器或触摸屏上;可通过变化的颜色、局部化的背景色、相邻或局部化的背景符号(例如,复选标记或X)、闪烁的颜色、已填充/未填充的对象和/或类似项指示装备/工具/装置状态;可显示操作状态(例如,高值、打开、闭合、运行、空闲、错误和/或类似项);可显示通信状态(例如,反馈错误、通信错误和/或类似项);可显示控件状态(例如,自动、手动、本地和/或类似项);并且可与显示的数值相关联地显示;等其他项。
根据本公开的一个或多个方面的控制系统(其可与图22中所示的系统800相似或相同)可包括AWD显示屏幕,所述AWD显示屏幕示出以下信息中的一者、一些或全部:(a)井配置和井段深度的图形显示;(b)鞋的图形显示;(c)计划井与实际井的动画;(d)井中钻柱的动画;(e)泥浆前沿跟踪/深度的值和图形显示;(f)每区段的环空速度;(g)裸眼容积;(h)至少针对以下进行的总行程和分钟数、要经历的行程和分钟数以及容积的动态计算:(i)地面到钻头;(ii)钻头到鞋;(iii)钻头到BOP;(iv)钻头到地面;(v)井循环;(vi)全循环;(j)钻柱位移,开口端和闭合端;(k)钻柱重量;(l)井眼中的立根;(m)有效容积;(n)泥浆流入量;(o)钻头转数;以及(p)钻头运行时间。
根据本公开的一个或多个方面的控制系统(其可与图22中所示的系统800相似或相同)可包括可以辅助装备操作员/资源生产者以高效且安全的方式操作装备(例如,钻井装备)的警报系统。警报系统可能够操作以:通过使用颜色、符号、闪烁、声音和其他具有不同含义的符号来吸引操作员注意警报;呈现描述性且易于理解的警报文本;使用具有不同含义的警报优先级;在逻辑上对警报进行分组;并且保持尽可能低的警报率。警报系统可另外或替代地利用指示装备或装置并且可通过变化的颜色、局部化的背景色、相邻或局部化的背景符号、闪烁的颜色、已填充或未填充的对象和/或类似项来显示状态的屏幕对象/符号。警报系统可另外或替代地被配置成:使得钻工/操作员对所有警报做出响应;用于直观的导航和警报确认;自动记录每个警报和警报状态更改;以及用于高系统可用性和鲁棒性。
一种根据本公开的一个或多个方面的至少部分地自动化钻井操作的方法,其可使用本文所述的(控制)系统中的一者、一些或全部来被采用,所述方法可包括:将指示第一钻井装备件的操作或能力的数据用作用于控制第二钻井装备件的操作的输入参数,其中指示第一钻井装备件的操作/能力的数据的影响不直观地与第二钻井装备件的操作/能力相连或者与其直觉相反。例如,涉及钻井装备件A的输出参数可用作钻井装备件B的操作的输入参数,并且涉及钻井装备件B的输出参数(例如,与输入参数相似或不同)可用作钻井装备件C的操作的输入参数。在此实例中,涉及装备件A的参数的操作/能力的一个或多个影响不直观地与装备件C的操作/能力相连或者在其适用于装备件C的操作/能力方面与其直觉相反。在此实例中,“钻井装备件B”可表示单个钻井装备件或一系列钻井装备件,在整个系列中,所述钻井装备件中的每一者的输出参数用作下一个钻井装备件的输入参数(值得注意的是,其可能但不必是整个钻井装备系列中的相同的输出和/或输入参数)。
鉴于包括附图和权利要求的本公开的整体,本领域普通技术人员将容易认识到,本公开介绍了一种设备,所述设备包括:集成井施工系统(IWCS),所述IWCS能够操作以用于通过对共同控制所述IWCS的多个集成子系统的多个集成控制装置的集成控制来对井进行施工,其中所述IWCS包括:IWCS通信网络;所述集成控制装置,每一者与所述IWCS通信网络直接连接;所述集成子系统;以及控制工作站,所述控制工作站与所述IWCS通信网络直接连接,并且能够操作以控制所述集成控制装置中的每一者,从而控制所述集成子系统。
每个集成控制装置可控制所述集成子系统中的对应集成子系统。
所述IWCS通信网络可以是单个光纤环形拓扑网络。
所述集成子系统可至少包括:钻机控制子系统,其包括绞车、顶驱、铁钻工、自动卡瓦和自动管操纵装备;流体循环子系统,其包括钻井液泵和钻井液重调装备;受控压力钻井控制子系统;节流压力控制子系统;井压控制子系统;以及闭路电视子系统。
每个子系统可包括:与该子系统的所述集成控制装置直接连接的子系统网络;以及各自与所述子系统网络直接连接的多个子系统部件。所述子系统部件可各自控制、执行、感测、测量和/或监测与包括该子系统部件的所述子系统相关联执行的井施工的方面。
所述控制工作站可包括处理器和存储施工程序的存储器,所述施工程序在由所述处理器执行时:至少部分地响应于从所述集成控制装置中的至少另一者接收的数据来控制每个集成控制装置。
所述控制工作站可包括处理器和存储施工程序的存储器,所述施工程序在由所述处理器执行时在多个预定操作顺序中的每一者期间控制每个集成控制装置。所述多个预定操作顺序可包括:上提单个管件;进行钻井连接;建造管件立根;下入钻铤立根;起出钻铤立根;湿起钻;倒划眼;使用顶驱将单个管件从井中心移动到猫道;将管件立根从所述井中心移动到所述猫道;使用套管钳将套管从所述猫道移动到所述井中心;使用管件递送臂和下套管工具将套管从所述猫道移动到所述井中心;使用所述顶驱和所述下套管工具将大直径套管从所述猫道移动到所述井中心;建造套管立根;以及在不使用所述下套管工具的情况下下入套管立根。所述施工程序在由所述处理器执行时可在执行预定操作顺序期间通过对集成控制装置的控制来控制顶驱、绞车、自动卡瓦、顶驱吊卡、铁钻工、钻井液泵送系统、猫道、自动排管器、自动指梁和管件递送臂。所述施工程序可能够由人类操作员配置,以允许操作员在执行预定操作顺序期间选择人类交互水平。所述施工程序可能够由人类操作员配置,以允许操作员在执行预定操作顺序期间选择所述IWCS的自动化水平。所述施工程序可能够由人类操作员配置,以允许所述操作员在执行每个预定操作顺序期间选择所述施工程序将控制所述IWCS的哪些机器。所述施工程序可能够由人类操作员配置,以允许操作员在执行每个预定操作顺序期间选择将由所述施工程序控制所述IWCS的哪些机器以及选择将由哪个操作员监督所述IWCS的哪些机器。所述施工程序可能够由人类操作员配置,以允许操作员选择将手动执行和/或确认每个预定操作顺序的哪些步骤以及由哪个操作员手动执行和/或确认所述步骤。
所述IWCS可能够操作以用于对井进行施工,而无需不受所述集成控制装置中的任一者控制、监测或不以其他方式与之通信的其他部件的操作。
所述IWCS可能够操作以用于对井进行施工,而无需不受所述集成控制装置中的任一者控制的其他部件的操作。
本公开还介绍了一种设备,所述设备包括:控制工作站,其与通信网络直接连接并且能够操作以控制各自与所述通信网络直接连接的多个集成控制装置中的每一者,其中每个集成控制装置控制集成井施工系统的对应部件,由此对所述集成控制装置的控制通过所述控制工作站的操作控制集成井施工系统。
除不受所述集成控制装置中的任一者控制的任何部件之外的所述集成井施工系统通过控制工作站的操作可能够操作以用于对井进行施工。
本公开还介绍了一种计算机程序产品,其包括有形的、计算机可读的、非暂时性的介质,所述介质在其上存储有用于以下的指令:自动控制控制集成井施工系统(IWCS)的集成子系统的多个集成控制装置,以执行用于对井进行施工的多个预定操作顺序的组合;由人类操作员通过控制工作站的操作接收要由所述IWCS执行的操作顺序中的一者的选择;由所述人类操作员通过所述控制工作站的操作接收在所选择操作顺序期间要操作的所述IWCS的第一机器的设置;以及响应于所述人类操作员通过所述控制工作站的操作接收到单个开始输入,使用所接收设置自动起动和控制所述IWCS的第一机器和第二机器以执行所选择操作顺序。
第一机器和第二机器的自动起动和控制可执行所选择操作顺序,而无需进一步的人工动作。
本公开还介绍了一种方法,所述方法包括:操作包括光纤环形网络的集成井施工系统(IWCS),其中所述光纤环形网络包括多个节点,这些节点包括:形成所述IWCS的各个机械件的可编程逻辑控制器(PLC);视频馈送;钻井操作员控制;高级监控;以及它们的组合。
所述IWCS机械PLC可包括:钻井液泵送系统PLC;顶驱PLC;绞车PLC;自动卡瓦PLC;铁钻工PLC;猫道PLC;自动排管器PLC;自动指梁PLC;以及管件递送臂PLC。
光纤环形网络可在PLC之间交换数据,以对机械进行协调控制。
光纤环形网络可在PLC中的一者或多者与钻井操作员之间交换数据,以进行IWCS的手动或半自动控制。
光纤环形网络可在PLC中的一者或多者与监控器之间交换数据,以进行对IWCS的自动和优化控制。
本公开还介绍了一种设备,所述设备包括:通信网络;多个集成控制装置,其各自与所述通信网络直接连接,其中每个集成控制装置控制集成井施工系统的对应部件,并且其中所述集成井施工系统能够操作以用于对井进行施工,而无需不受所述集成控制装置中的任一者控制的其他部件;以及控制工作站,其与所述通信网络直接连接,并且能够操作以控制所述集成控制装置中的每一者,从而控制所述集成井施工系统。
本公开还介绍了一种设备,所述设备包括:通信网络;多个集成控制装置,其各自与所述通信网络直接连接,其中每个集成控制装置控制多个集成井施工部件中的对应部件,并且其中除不受所述集成控制装置中的任一者控制的任何部件之外的所述集成井施工部件能够共同操作以用于对井进行施工;以及控制工作站,其与所述通信网络直接连接,并且能够操作以控制所述集成控制装置中的每一者,从而控制所述集成井施工系统。
本公开还介绍了一种设备,所述设备包括:通信网络;多个集成控制装置,其各自与所述通信网络直接连接,其中每个集成控制装置控制多个集成井施工部件中的对应部件,并且其中所述集成井施工部件形成能够操作以用于对井进行施工而无需任何其他部件的集成井施工系统;以及控制工作站,其与所述通信网络直接连接,并且能够操作以控制所述集成控制装置中的每一者,从而控制所述集成井施工系统。
本公开还介绍了一种方法,所述方法包括:致使井施工系统执行井施工操作,由此实时地自动收集和分析与所述井施工操作相关联的数据,以基于所述数据确定多个参数,并且其中所确定参数中的至少一些用于控制所述井施工操作。
数据可选自:人类操作员输入;装备控制、反馈和互锁信号;地面传感器信号;和井下传感器信号。
井施工系统可包括处理系统,所述处理系统包括处理器和在其上记录有指令的存储器,所述指令用于在由处理器执行时:自动确定参数;以及并至少部分地基于所确定的参数来自动控制井施工操作的至少一部分。
井施工系统可包括处理系统,所述处理系统包括处理器和在其上记录有指令的存储器,所述指令用于在由处理器执行时:自动确定参数;以及基本上实时向人类操作员自动显示所确定的参数中的至少一些。所述方法可还包括由人类操作员至少部分地基于所显示的参数至少部分地控制井施工操作的至少一部分。所述显示可包括数字、图片、动画或它们的组合。
所确定的参数可包括以下中的一者或多者:钻井液有效容积、钻井液损失和/或增益、钻头深度、井筒深度、吊钩负荷重量和摩擦力、钻井液泵行程、钻井液行程率、穿透率、钻压、钻头转数、钻头运行时间、井配置、钻柱配置、节流阀配置、压井管线配置、井溢流计算器、泥浆补给罐容积、泥浆补给罐差值确定以及泥浆补给罐累积容积。
所确定的参数中的一者可以是基于以下的井溢流确定:所测量深度;真实的竖直深度;所测量的鞋深度;竖直鞋深度;原始钻井液重量;泄漏测试钻井液重量;泄漏测试压力;关井套管压力;关井钻管压力;井溢流增益容积;压井泵选择;压井泵容量;压井泵速度;慢速循环率压力;安全裕度和所选择节流/压井管线。
本公开还介绍了一种方法,所述方法包括:致使井施工系统执行井施工操作,由此实时地自动收集和分析与所述井施工操作相关联的数据,以基于所述数据确定多个参数,并且其中所确定参数中的至少一些各自为触发至少一个实时井施工操作警报提供基础。
数据可选自:人类操作员输入;装备控制、反馈和互锁信号;地面传感器信号;和井下传感器信号。
所述至少一个实时警报可以是多个警报,其包括:高泥浆补给罐容积;低泥浆补给罐容积;高有效钻井液容积;低有效钻井液容积;高钻井液损失;低钻井液损失;高钻井液增益;低钻井液增益;高钻井液回流;低钻井液回流;高立管压力;低立管压力;钻井液泵送系统总行程率;以及钻井液泵送系统总行程。
井施工系统可包括处理系统,所述处理系统包括处理器和在其上记录有指令的存储器,所述指令用于在由处理器执行时:自动确定参数;以及基于所确定参数中的至少一个自动触发至少一个实时警报。
所确定的参数可包括以下中的一者或多者:钻井液有效容积、钻井液损失和/或增益、钻头深度、井筒深度、吊钩负荷重量和摩擦力、钻井液泵行程、钻井液行程率、穿透率、钻压、钻头转数、钻头运行时间、井配置、钻柱配置、节流阀配置、压井管线配置、井溢流计算器、泥浆补给罐容积、泥浆补给罐差值确定以及泥浆补给罐累积容积。
本公开还介绍了一种设备,所述设备包括在井施工操作期间与井施工系统结合利用的随钻分析(AWD)控制系统,其中用于AWD控制系统的输入包括:在井施工操作期间由井施工系统所施工的井的预期配置;在井施工操作期间由井施工系统使用的钻柱的配置;来自钻井参数传感器的信号;以及钻井装备参数。所述AWD控制系统的输出包括对以下的实时确定:所述井的深度和轨迹;钻头深度;井中的钻柱管件和/或立根的数量;钻柱容积、位移和重量;钻井液罐容积和罐选择;钻井液损失和/或增益;泥浆补给罐容积差;泥浆补给罐累积容积;钻井液泵送系统的总和/或每区段行程和/或要经历的行程;钻井液泵送系统的总行程率;钻井液泵送系统缸套容量和效率;进入井中的个别和总体钻井液流量;环空钻井液速度;总和/或每区段钻井液容积;每区段总分钟数和/或要经历的分钟数;钻井液回流;钻头运行时间和转数;钻压;穿透率;吊钩负荷和立管压力。来自所述AWD控制系统的输出可还包括井溢流计算器和压井记录表。来自所述AWD控制系统的输出可还包括传感器和计算以用于存储在与所述井施工系统相关联的历史数据中。来自所述AWD控制系统的输出可还包括井施工操作警告和警报。
所述钻井参数传感器可包括钻井液罐液位传感器、立管压力传感器、水泥歧管压力传感器和钻井液流量传感器。
钻井装备参数可包括每分钟钻柱转数、上扣扭矩、起重位置,吊钩负荷、卡瓦状态、平均立根长度、平均管件长度、单个钻井液系统泵的缸套容量和效率、每分钟顶驱转数、节流管线参数、压井管线参数、钻柱区段数、钻柱容量、钻柱钢位移和钻柱闭合位移。
本公开还介绍了一种设备,所述设备包括:控制工作站,其与通信网络直接连接并且能够操作以控制各自与所述通信网络直接连接的多个控制装置中的每一者,其中每个控制装置控制集成井施工系统的对应部件,由此对所述控制装置的控制通过所述控制工作站的操作控制集成井施工系统,其中控制工作站包括显示器、处理器和存储器,所述存储器存储:当由所述处理器执行时控制每个控制装置的施工程序;以及随钻分析(AWD)程序。所述AWD系统的输入包括:在井施工操作期间由井施工系统所施工的井的预期配置;在井施工操作期间由井施工系统使用的钻柱的配置;来自钻井参数传感器的信号;以及钻井装备参数。所述AWD程序在由处理器执行时实时生成并且在显示器上的AWD屏幕中实时显示以下中的一者或多者:井的预期配置和/或实际配置的图形显示,包括深度;井中鞋的图形显示;井的预期和实际配置的动画;井中钻柱的动画;钻井液前沿跟踪和/或深度的值文本和/或图形显示;每区段的环空速度;裸眼容积;针对以下的一者或多者的总行程和分钟数、要经历的行程和分钟数以及容积:地面到钻头、钻头到鞋、钻头到防喷器、钻头到地面;井循环;全循环;钻柱位移,开口端和闭合端;钻柱重量;井中的管件的数量;有效容积;进入井中的钻井液流量;钻头转数;以及钻头运行时间。
本公开还介绍了一种设备,所述设备包括用于与集成井施工系统(IWCS)一起使用的控制工作站,其中所述IWCS能够操作以用于通过对共同控制所述IWCS的多个集成子系统的多个集成控制装置的集成控制来对井进行施工,并且其中所述控制工作站包括人机接口(HMI),所述人机接口包括显示器、触摸屏、操纵杆以及处理系统,所述处理系统包括处理器和上面具有施工程序的存储器,所述施工程序在由所述处理器执行时:向所述控制工作站的人类操作员呈现设置向导,所述设置向导引导所述操作员输入让所述集成子系统的一个或多个井施工机器执行井施工顺序的操作参数;并且控制所述集成控制装置并且因此控制所述集成子系统来基于所输入操作参数执行所述井施工顺序。
所述井施工顺序可选自:上提单个管件;进行钻井连接;建造管件立根;下入钻铤立根;起出钻铤立根;湿起钻;倒划眼;使用顶驱将单个管件从井中心移动到猫道;将管件立根从所述井中心移动到所述猫道;使用套管钳将套管从所述猫道移动到所述井中心;使用管件递送臂和下套管工具将套管从所述猫道移动到所述井中心;使用所述顶驱和所述下套管工具将大直径套管从所述猫道移动到所述井中心;建造套管立根;以及在不使用所述下套管工具的情况下下入套管立根。
所输入操作参数可用于以下中的一者或多者:顶驱、绞车、自动卡瓦、顶驱吊卡、铁钻工、钻井液泵送系统、猫道、自动排管器、自动指梁和管件递送臂。
所输入操作参数可包括所述井施工机器中的至少一者的速度限制。
所输入操作参数可包括所述井施工机器中的至少一者的行进止点。
所输入操作参数可包括所述井施工机器中的至少一者的最大限制。
所输入操作参数可包括所述井施工机器中的至少一者的目标设置。
所输入操作参数可包括所述井施工顺序的目标设置。
所输入操作参数可包括自动化水平。所述自动化水平可选自:由所述施工程序进行的自动控制;由所述施工程序在所述人类操作员确认之后进行的自动控制;以及由所述人类操作员进行的手动操作。
所述人类操作员可通过致动所述触摸屏上的按钮来引起所述井施工顺序的开始。
所述人类操作员可通过致动所述操纵杆以使所述井施工机器的速度斜升来引起所述井施工顺序的开始。
所述施工程序可允许所述人类操作员在所述井施工顺序期间对所述井施工机器中的一者或多者进行手动控制。
所述施工程序可允许所述人类操作员在所述井施工顺序期间更改所述井施工机器中的一者或多者的操作参数。
所述井施工顺序可以是下钻或起钻顺序,其可以比普通人类工作队不使用所述IWCS所能够实现的速度快至少百分之五的平均每小时立根数下钻或起钻速度来执行。
所述井施工顺序可以是下钻或起钻顺序,其可以比普通人类工作队不使用所述IWCS所能够实现的与平均下钻或起钻速度的标准偏差低至少百分之五十的标准偏差来执行。
所述井施工顺序可以是下钻顺序,其可以比普通人类工作队不使用所述IWCS所能够实现的连接时间快至少百分之四的平均卡瓦到卡瓦连接时间来执行。
所述井施工顺序可以是下钻顺序,其可以比普通人类工作队不使用所述IWCS所能够实现的与平均卡瓦到卡瓦连接时间的标准偏差低至少百分之五十的标准偏差来执行。
本公开还介绍了一种设备,所述设备包括:集成井施工系统(IWCS),所述IWCS能够操作以用于通过对共同控制所述IWCS的多个集成子系统的多个集成控制装置的集成控制来对井进行施工,其中所述IWCS包括处理系统,所述处理系统包括处理器和上面具有施工程序的存储器,所述施工程序在由所述处理器执行时:在多个预定操作顺序中的每一者期间控制每个集成控制装置,并且因此控制每个集成子系统;并且防止所述IWCS的机器之间发生碰撞。
由所述施工程序防止发生碰撞的所述IWCS机器可以包括:绞车;铁钻工;钳操纵车;钳操纵臂;猫道;管件递送臂;下部稳定臂;上部管件约束件;中间管件约束件;下部管件约束件;顶驱;顶驱吊卡;指梁;转移桥排管器;以及立根盒引导臂。所述施工程序可还防止在以下之间发生碰撞:所述所IWCS机器;所述IWCS机器中的任一者正在运输的管件;从所述井中伸出的管件;所述IWCS的鼠洞中的管件;以及所述IWCS的移送位置中的管件。所述施工程序阻可防止在以下之间发生碰撞:绞车与猫道、铁钻工、下部稳定臂、钳操纵臂、钳操纵车、管件递送臂和上部管件约束件中的一者或多者;和/或顶驱与所述铁钻工、所述钳操纵车、所述钳操纵臂、所述猫道、所述管件递送臂、所述下部稳定臂和所述上部管件约束件中的一者或多者;和/或所述铁钻工与所述绞车、所述顶驱、所述猫道、所述管件递送臂、所述下部稳定臂、中间管件约束件、旋转台、自动卡瓦、从所述井中伸出的管件和从所述IWCS的鼠洞中伸出的管件中的一者或多者;和/或所述钳操纵车与所述绞车、所述顶驱、所述猫道、所述管件递送臂、所述下部稳定臂、所述旋转台、所述自动卡瓦和从所述井中伸出的管件中的一者或多者;和/或所述钳操纵臂与所述绞车、所述顶驱、所述猫道、所述管件递送臂、所述下部稳定臂、所述中间管件约束件、所述旋转台、所述自动卡瓦、从所述井中伸出的管件和从鼠洞中伸出的管件中的一者或多者;和/或所述猫道与所述绞车、所述顶驱、所述铁钻工、所述钳操纵车、所述钳操纵臂、所述管件递送臂、所述下部稳定臂、所述IWCS的移送位置中的管件和从鼠洞中伸出的管件中的一者或多者;和/或所述管件递送臂与所述绞车、所述顶驱、所述铁钻工、所述钳操纵车、所述钳操纵臂、所述猫道、所述下部稳定臂、转移桥排管器、所述上部管件约束件、所述中间管件约束件、下部管件约束件、立根盒引导臂、所述移送位置中的管件、所述旋转台和所述自动卡瓦中的一者或多者;和/或所述下部稳定臂与所述绞车、所述顶驱、所述铁钻工、所述钳操纵车、所述钳操纵臂、所述猫道、所述管件递送臂和所述中间管件约束件中的一者或多者;和/或所述转移桥排管器与所述管件递送臂、所述上部管件约束件、所述下部管件约束件、所述立根盒引导臂、所述移送位置中的管件和指梁中的一者或多者;和/或所述上部管件约束件与所述绞车、所述顶驱、所述管件递送臂、所述转移桥排管器、所述下部管件约束件和所述立根盒引导臂中的一者或多者;和/或所述中间管件约束件与所述铁钻工、所述钳操纵臂、所述管件递送臂、所述下部稳定臂和所述鼠洞中的管件中一者或多者;和/或所述立根盒引导臂与所述管件递送臂、所述下部稳定臂、所述转移桥排管器、所述上部管件约束件和所述下部管件约束件中的一者或多者;和/或所述指梁与所述转移桥排管器;和/或所述下部管件约束件与所述管件递送臂、所述下部稳定臂、所述转移桥排管器、所述上部稳定臂和所述立根盒引导臂中的一者或多者;和/或所述移送位置中的管件与所述管件递送臂和所述转移桥排管器中的一者或两者;和/或所述自动卡瓦与所述绞车、所述顶驱、所述铁钻工、所述钳操纵车、所述钳操纵臂、所述管件递送臂和所述下部稳定臂中的一者或多者。
本公开还介绍了一种方法,所述方法包括:利用多个自动控制的井施工机器中的每一者来对井进行施工,所述多个自动控制的井施工机器包括:绞车;铁钻工;钳操纵车;钳操纵臂;猫道;管件递送臂;下部稳定臂;上部管件约束件;中间管件约束件;下部管件约束件;顶驱;顶驱吊卡;指梁;转移桥排管器;立根盒引导臂;鼠洞;鼠洞;钻井液泵送系统;以及钻井液重调系统。
本公开还介绍了一种能够操作以完全控制井施工操作的多个预定操作顺序中的每一者的系统,其中所述顺序包括:上提单个管件;进行钻井连接;建造管件立根;下入钻铤立根;起出钻铤立根;湿起钻;倒划眼;使用顶驱将单个管件从井中心移动到猫道;将管件立根从所述井中心移动到所述猫道;使用套管钳将套管从所述猫道移动到所述井中心;使用管件递送臂和下套管工具将套管从所述猫道移动到所述井中心;使用所述顶驱和所述下套管工具将大直径套管从所述猫道移动到所述井中心;建造套管立根;以及在不使用所述下套管工具的情况下下入套管立根。
本公开还介绍了一种用于控制钻井操作的控制系统,其中可选择用于各种操作的自动化水平。它可生成促进自动化水平的选择的控制屏幕。它可促进全自动化、半自动化(例如,通过钻工确认以开始特定的顺序)或手动控制(例如,通过操纵杆)的选择。
本公开还介绍了一种用于控制钻井操作的控制系统,所述控制系统包括:可定制显示器;控制屏幕,其促进选择指标图的(例如,圆形条形图、线性条形图)的标度和限制;可定制选择,其包括最小和最大图形值、警告值限制和标度。
本公开还介绍了一种用于控制钻井操作的控制系统,其包括软件对象(符号、图标、纽扣等)的显示,所述显示:显示在监视器或触摸屏上;通过变化的颜色、局部化的背景色、相邻或局部化的背景符号(例如,复选标记或X)、闪烁的颜色、已填充或未填充的对象等指示装备或装置状态;显示操作状态(例如,高值、打开、闭合、运行、空闲、错误等);显示通信状态(例如,反馈错误、通信错误等);显示控件状态(例如,自动、手动、本地等);和/或可与显示的数值相关联地显示。
本公开还介绍了一种包括通信网络的钻机控制系统。所述通信网络可以是单环、星形或菊花链网络。所述通信网络可以是光纤的。所述钻机控制系统还包括直接连接到网络的控制工作站。所述钻机控制系统还包括多个不同的控制装置。每个控制装置都可执行、致使执行、感测、测量、监测和/或记录机械、软件或其他地面或井下部件(或其组)、子系统(或其组)或系统(或其组)的机械、软件或其他动作。每个控制装置可直接连接到通信网络。每个控制装置可与每个其他控制装置(直接或间接)通信。每个控制装置可至少部分地响应于或至少部分地基于或以其他方式使用来自至少一个其他控制装置的数据而起作用。例如,每个控制装置可具有来自另一个钻机部件(或其组)、钻机子系统(或其组)或钻机系统(或其组)(的一个或多个控制装置)的输入。每个控制装置可以是计算机(PC或IPC)或PLC。所述钻机控制系统还可包括多个本地控制网络。每个本地控制网络可诸如通过控制装置中的对应的控制装置与通信网络连接。所述钻机控制系统还可包括多个本地控制装置。每个本地控制装置可与对应的本地控制网络直接连接。每个本地控制装置可以是计算机(PC或IPC)或PLC。直接连接到通信网络的控制装置可执行所有控制逻辑,并且控制工作站可以是(至少主要是)数据交换器。
本公开还介绍了一种警报系统,所述警报系统帮助操作员以高效且安全的方式操作装备和过程。所述报警系统可以利用屏幕对象/符号,所述屏幕对象/符号:指示装备或装置;通过变化的颜色、局部化的背景色、相邻或局部化的背景符号、闪烁的颜色、已填充或未填充的对象等来显示状态;被设计来通过使用颜色、符号、闪烁、声音和其他具有不同含义的符号来吸引操作员注意警报;呈现描述性且易于理解的警报文本;使用具有不同含义的警报优先级;在逻辑上对警报进行分组;保持尽可能低的警报率;确保操作员对所有警报做出响应;允许直观的导航和警报确认;允许记录所有警报和警报状态变化;并且提供高系统可用性和鲁棒性。
本公开还介绍了一种随钻分析(AWD)控制系统,其能够操作以示出由复杂算法确定的大量钻井相关参数。所述AWD输入可包括:井配置;钻柱(包括BHA)配置;钻井参数传感器(例如,泥坑液位传感器、立管压力传感器、泥浆流量传感器);以及钻井装备参数(例如,直接来自装备,诸如钻柱RPM、上扣扭矩、泥浆泵SPM)。所述AWD输出可递送到以下项和/或由其使用:一个或多个工作站显示器,包括AWD显示器;历史测井系统;和/或泥浆测井仪系统。所述AWD输出可包括井配置,钻柱(包括BHA)配置以及对以下的动态跟踪:井;钻头深度;井眼中立根;分段的泥浆容积;钻柱容积、位移和重量;泥浆罐容积,包括在用罐选择和损失/增益计算;泥浆补给罐容积差;泥浆补给罐累积容积;泥浆泵总行程计数器(可在泥浆泵中完成单个计数);泥浆泵SPM总计;泥浆泵缸套的容量和效率;泥浆流入井眼中,单个和总计;每区段的环空泥浆速度;每区段的泥浆量;每区段的总行程;每区段要经历的行程;每区段的总分钟数;每区段经历的分钟数;泥浆返回流量;钻头运行时间和转数;WOB;ROP;吊钩负荷;以及立管压力。所述AWD输出可还包括:井溢流计算器和压井记录表;用于存储在历史趋向系统中的传感器和计算;钻井操作警告和警报。
本公开还介绍了一种AWD显示屏幕,所述显示屏幕显示:井配置和井段深度的图形显示;鞋的图形显示;计划井与实际井的动画;井中钻柱的动画;泥浆前沿跟踪/深度的值和图形显示;每区段的环空速度;裸眼容积;针对以下进行的总行程和分钟数、要经历的行程和分钟数以及容积的动态计算:地面到钻头、钻头到鞋、钻头到BOP、钻头到地面;井循环;全循环;钻柱位移(开口端和闭合端);钻柱重量;井眼中的立根;有效容积;泥浆流入量;钻头转数;以及钻头运行时间。
本公开还介绍了自动下钻(或起钻),其导致:比普通人类工作队快至少5%的自动平均下钻速度(例如,以立根数/每小时计);和/或比普通人类工作队低至少50%的与平均下钻速度的自动标准偏差;和/或比普通人类工作队快至少4%的自动平均下钻卡瓦到卡瓦连接时间;和/或比普通人类工作队低至少50%的与平均下钻卡瓦到卡瓦连接时间的自动标准偏差。
本公开还介绍了一种自动钻井操作的方法,所述方法需要输入至少给定的一组输入参数,并且需要能够对与钻井操作有关的至少给定的一组装备进行自动控制。
本公开还介绍了一种用于控制钻井操作的控制系统,其中可选择用于各种操作的自动化水平。它可生成促进自动化水平的选择的控制屏幕。它可促进全自动化、半自动化(例如,通过钻工确认以开始特定的顺序)或手动控制(例如,通过操纵杆)的选择。
本公开还介绍了一种用于控制钻井操作的控制系统,所述控制系统包括:可定制显示器;控制屏幕,其促进选择指标图的(例如,圆形条形图、线性条形图)的标度和限制;以及可定制选择,其包括最小和最大图形值、警告值限制和标度。
本公开还介绍了一种用于控制钻井操作的控制系统,其包括软件对象(符号、图标、纽扣等)的显示,所述显示:显示在监视器或触摸屏上;通过变化的颜色、局部化的背景色、相邻或局部化的背景符号(例如,复选标记或X)、闪烁的颜色、已填充或未填充的对象等指示装备或装置状态;显示操作状态(例如,高值、打开、闭合、运行、空闲、错误等);显示通信状态(例如,反馈错误、通信错误等);显示控件状态(例如,自动、手动、本地等);和/或可与显示的数值相关联地显示。
前述内容列出了若干实施方案的特征,使得本领域普通技术人员可更好地理解本公开的方面。本领域普通技术人员应当理解,他们可容易地将本公开用作用于设计或修改用于实现相同目的和/或获得与本文介绍的实施方案相同的优点的其他过程和结构的基础。本领域普通技术人员还应当认识到,此类等效构造并不偏离本公开的范围,并且其可在不偏离本公开的精神和范围的情况下在本文中进行各种改变、替代和更改。
本公开最后部分的摘要被提供来允许读者快速确定本技术公开的本质。应当理解,它不应被用来解释或限制权利要求的范围或含义。
- 集成井施工系统操作
- 集成井施工系统操作