面向上肢穿戴机器人的人机博弈控制方法及系统
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及智能机器人智能控制技术领域.具体地,涉及面向上肢穿戴机器人的人机博弈控制方法及系统。
背景技术
上肢穿戴机器人共享控制是一个新兴的研究领域,在机器人康复、搜索救援、远程操作等方面有着广泛的应用。人与机器人具有互补的能力,在许多情况下,他们的协作是必要的。传统的处理人与机器人的物理交互的方法通常涉及到机器人通过阻抗或导纳控制器顺从人的运动,明确定位这些角色的理由是,人类拥有更好的认知能力,如态势感知和决策技能,而机器人拥有更好的身体能力,如精确性和力量。然而,这种人为领导者,机器人为跟随者的固定控制模式要求人始终领导任务和驱动机器人意味着让人不断地承受高的认知负荷,这会在长时间的操作中降低性能。因此迫切需要一种上肢穿戴机器人的智能控制方法,使得人和机器人根据人的运动意图在领导者和追随者之间实时进行切换来满足更复杂控制情景的需要。
例如协同焊接,机器人能够根据对工件、环境和过程的粗略了解,按照指定的期望轨迹自主地执行任务,而人类可以为机器人提供任务中的纠正行动、微调控制和情景指导。另一个例子是避障,当机器人感知到即将发生的碰撞或违反安全约束时,它可以很好地控制并自动修改人类的意图动作。
专利文献CN110652423A(申请号:201910968787.3)公开了一种带有精确力控制的可穿戴式上肢康复训练机器人,包括可穿戴式腰带、多自由度机械臂,以及控制盒;机器人通过腰带穿戴在人的腰部,由主动执行器驱动,能够实现左、右肩关节内收/外展/前屈/后伸以及左、右肘关节前屈/后伸这些自由度的主被动康复训练。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种面向上肢穿戴机器人的人机博弈控制方法及系统。
根据本发明提供的一种面向上肢穿戴机器人的人机博弈控制方法,包括以下步骤:
步骤S1:在任务进行时利用末端手柄交互力传感器,实时记录使用者在运动时上肢的端点力数据,建立使用者和上肢穿戴机器人各个基本任务的能力矩阵和任务匹配矩阵,每一个基本任务都根据人和上肢穿戴机器人的能力矩阵和任务匹配矩阵进行任务分配;
步骤S2:将任务分配的结果输入基于博弈论的人机零和游戏数学模型中,计算出机器人的最佳刚度值;
步骤S3:将机器人刚度值和实时端点力输入机器人阻抗模型,计算出机器人末端在笛卡尔空间的参考轨迹;
步骤S4:将笛卡尔空间的参考轨迹通过机器人逆运动学计算出在关节空间的参考轨迹,建立机器人的动力学模型,并确定模型参数,建立李雅普诺夫方程,推导得到自适应控制器和自适应率。
优选地,所述步骤S1:
使用者和机器人共同完成的任何复杂或多进程任务都分解为多个简单的基本任务Υ={Υ
人或机器人为完成某项基本任务而进行的任务合作或者竞争行为,这些行为是基于人和机器人单独成功执行该任务所需的能力矩阵N
一个基本任务分解为:
所以复杂任务表示为:
通过上述方法可以将任务分解为简单的基本任务,通过下面的任务匹配矩阵对单个基本任务进行分配:
任务匹配矩阵反映了机器人或人对每个基本任务的适合程度,人或机器人对于某项基本任务的匹配是这是基于人的运动意图,任务匹配矩阵Φ
其中,ω
辅助矩阵Θ被定义为:
其中,
H
由于人具有较强的认知能力和决策能力,所以当任务中有许多复杂的需要决定的情况时,人是最适合领导任务的,通过末端手柄交互力传感器测量人对机器人的末端力来衡量人对某基本任务的匹配度,当人放松,末端力减少,人对基本任务的匹配度降低,该任务分配给机器人领导;当人施加较大的末端力,人对基本任务的匹配度提高,该基本任务分配给人来领导。
优选地,所述在步骤S2:
某基本任务分配给人来领导时:
首先将机器人阻抗模型
在机器人阻抗模型中:M
在状态方程中:
建立人的控制目标
根据黎卡提方程计算出最佳力f
优选地,所述步骤S2:
某个基本任务分配给机器人来领导时:
人和机器人的竞争交互行为可以看做看作是两方零和博弈的一种具体应用形式,即双方一方赢,另一方输,机器人的控制目标变为:
优选地,所述步骤S4:
通过雅克比矩阵
其中,
τ为输出力矩;
q为关节空间角度向量;
M(q)为惯性矩阵;
D
g(q)为重力补偿矩阵;
τ
然后建立李雅普诺夫方程,推导得到自适应控制器和自适应率,通过自适应控制器计算出的控制力矩作为输入驱动弹性执行器,经过弹性执行器中的弹性组件的作用输出转矩对机器人关节进行驱动。
根据本发明提供的一种面向上肢穿戴机器人的人机博弈控制系统,包括以下模块:
模块S1:在任务进行时利用末端手柄交互力传感器,实时记录使用者在运动时上肢的端点力数据,建立使用者和上肢穿戴机器人各个基本任务的能力矩阵和任务匹配矩阵,每一个基本任务都根据人和上肢穿戴机器人的能力矩阵和任务匹配矩阵进行任务分配;
模块S2:将任务分配的结果输入基于博弈论的人机零和游戏数学模型中,计算出机器人的最佳刚度值;
模块S3:将机器人刚度值和实时端点力输入机器人阻抗模型,计算出机器人末端在笛卡尔空间的参考轨迹;
模块S4:将笛卡尔空间的参考轨迹通过机器人逆运动学计算出在关节空间的参考轨迹,建立机器人的动力学模型,并确定模型参数,建立李雅普诺夫方程,推导得到自适应控制器和自适应率。
优选地,所述模块S1:
使用者和机器人共同完成的任何复杂或多进程任务都分解为多个简单的基本任务Υ={Υ
人或机器人为完成某项基本任务而进行的任务合作或者竞争行为,这些行为是基于人和机器人单独成功执行该任务所需的能力矩阵N
一个基本任务分解为:
所以复杂任务表示为:
通过上述方法可以将任务分解为简单的基本任务,通过下面的任务匹配矩阵对单个基本任务进行分配:
任务匹配矩阵反映了机器人或人对每个基本任务的适合程度,人或机器人对于某项基本任务的匹配是这是基于人的运动意图,任务匹配矩阵Φ
其中,ω
辅助矩阵Θ被定义为:
其中,
H
由于人具有较强的认知能力和决策能力,所以当任务中有许多复杂的需要决定的情况时,人是最适合领导任务的,通过末端手柄交互力传感器测量人对机器人的末端力来衡量人对某基本任务的匹配度,当人放松,末端力减少,人对基本任务的匹配度降低,该任务分配给机器人领导;当人施加较大的末端力,人对基本任务的匹配度提高,该基本任务分配给人来领导。
优选地,所述在模块S2:
某基本任务分配给人来领导时:
首先将机器人阻抗模型
在机器人阻抗模型中:M
在状态方程中:
建立人的控制目标
根据黎卡提方程计算出最佳力f
优选地,所述模块S2:
某个基本任务分配给机器人来领导时:
人和机器人的竞争交互行为可以看做看作是两方零和博弈的一种具体应用形式,即双方一方赢,另一方输,机器人的控制目标变为:
表示机器人的任务权重,通过黎卡提方程计算出机器人最佳刚度u
优选地,所述模块S4:
通过雅克比矩阵
其中,
τ为输出力矩;
q为关节空间角度向量;
M(q)为惯性矩阵;
D
g(q)为重力补偿矩阵;
τ
然后建立李雅普诺夫方程,推导得到自适应控制器和自适应率,通过自适应控制器计算出的控制力矩作为输入驱动弹性执行器,经过弹性执行器中的弹性组件的作用输出转矩对机器人关节进行驱动。
与现有技术相比,本发明具有如下的有益效果:
1、本发明专利中的面向上肢穿戴机器人的人机博弈控制系统基于博弈论,将人机交互看作人机零和或非零和博弈游戏,通过测量末端的交互力估计人的运动意图,从而实时让人机在领导者和跟随者之间切换,可以满足更复杂的控制情景。
2、本发明专利中的面向上肢穿戴机器人的人机博弈控制系统将复杂任务进行任务分解成多个基本任务,然后建立人机能力矩阵和任务匹配矩阵对基本任务进行分配,解决了传统人机交互控制中人机固定角色的单一性问题,提高了任务执行的效率。
3、本发明专利中的面向上肢穿戴机器人的人机博弈控制系统仅使用末端手柄交互力传感器测量力信息,规避了多传感器信息融合的数据耦合情况,大大减少了数据处理的复杂性,操作简单。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
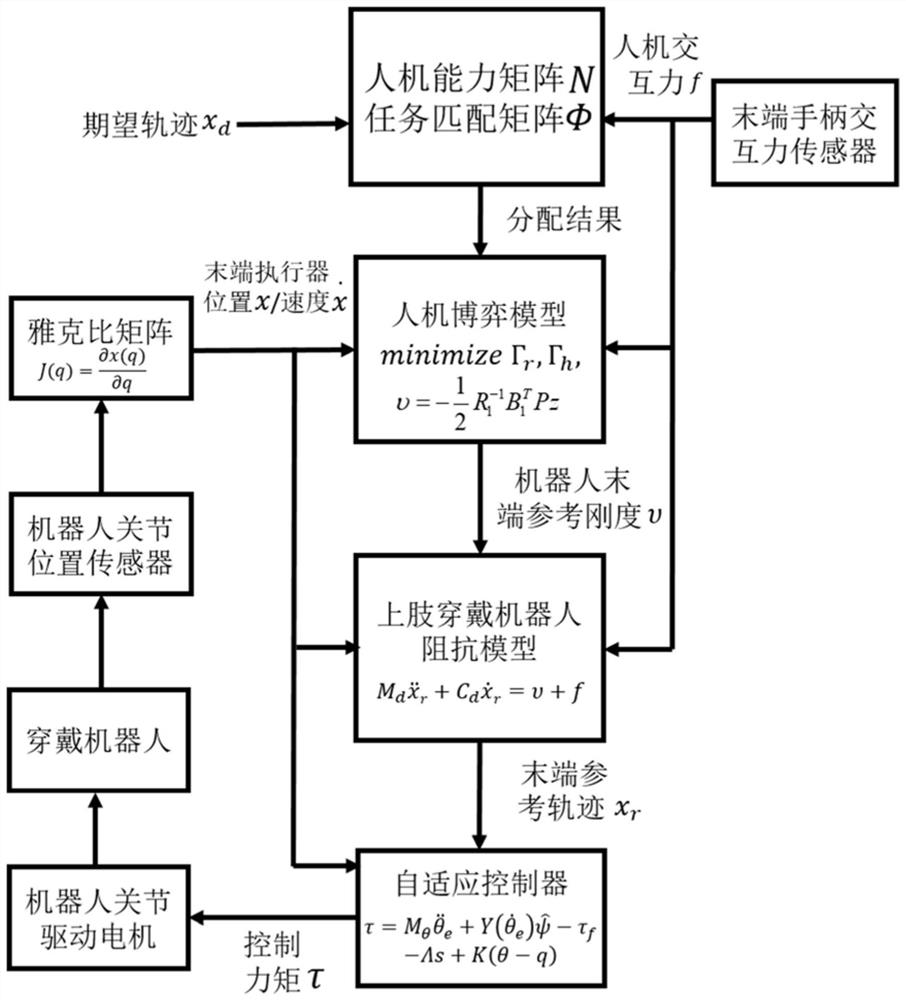
图1为为上肢穿戴机器人人机博弈控制系统框图示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
根据本发明提供的一种面向上肢穿戴机器人的人机博弈控制方法,包括以下步骤:
步骤S1:在任务进行时利用末端手柄交互力传感器,实时记录使用者在运动时上肢的端点力数据,建立使用者和上肢穿戴机器人各个基本任务的能力矩阵和任务匹配矩阵,每一个基本任务都根据人和上肢穿戴机器人的能力矩阵和任务匹配矩阵进行任务分配;
步骤S2:将任务分配的结果输入基于博弈论的人机零和游戏数学模型中,计算出机器人的最佳刚度值;
步骤S3:将机器人刚度值和实时端点力输入机器人阻抗模型,计算出机器人末端在笛卡尔空间的参考轨迹;
步骤S4:将笛卡尔空间的参考轨迹通过机器人逆运动学计算出在关节空间的参考轨迹,建立机器人的动力学模型,并确定模型参数,建立李雅普诺夫方程,推导得到自适应控制器和自适应率。
具体地,所述步骤S1:
使用者和机器人共同完成的任何复杂或多进程任务都分解为多个简单的基本任务Υ={Υ
人或机器人为完成某项基本任务而进行的任务合作或者竞争行为,这些行为是基于人和机器人单独成功执行该任务所需的能力矩阵N
一个基本任务分解为:
所以复杂任务表示为:
通过上述方法可以将任务分解为简单的基本任务,通过下面的任务匹配矩阵对单个基本任务进行分配:
任务匹配矩阵反映了机器人或人对每个基本任务的适合程度,人或机器人对于某项基本任务的匹配是这是基于人的运动意图,任务匹配矩阵Φ
其中,ω
辅助矩阵Θ被定义为:
其中,
H
由于人具有较强的认知能力和决策能力,所以当任务中有许多复杂的需要决定的情况时,人是最适合领导任务的,通过末端手柄交互力传感器测量人对机器人的末端力来衡量人对某基本任务的匹配度,当人放松,末端力减少,人对基本任务的匹配度降低,该任务分配给机器人领导;当人施加较大的末端力,人对基本任务的匹配度提高,该基本任务分配给人来领导。
具体地,所述在步骤S2:
某基本任务分配给人来领导时:
首先将机器人阻抗模型
在机器人阻抗模型中:M
在状态方程中:
建立人的控制目标
根据黎卡提方程计算出最佳力f
具体地,所述步骤S2:
某个基本任务分配给机器人来领导时:
人和机器人的竞争交互行为可以看做看作是两方零和博弈的一种具体应用形式,即双方一方赢,另一方输,机器人的控制目标变为:
具体地,所述步骤S4:
通过雅克比矩阵
其中,
τ为输出力矩;
q为关节空间角度向量;
M(q)为惯性矩阵;
D
g(q)为重力补偿矩阵;
τ
然后建立李雅普诺夫方程,推导得到自适应控制器和自适应率,通过自适应控制器计算出的控制力矩作为输入驱动弹性执行器,经过弹性执行器中的弹性组件的作用输出转矩对机器人关节进行驱动。
根据本发明提供的一种面向上肢穿戴机器人的人机博弈控制系统,包括以下模块:
模块S1:在任务进行时利用末端手柄交互力传感器,实时记录使用者在运动时上肢的端点力数据,建立使用者和上肢穿戴机器人各个基本任务的能力矩阵和任务匹配矩阵,每一个基本任务都根据人和上肢穿戴机器人的能力矩阵和任务匹配矩阵进行任务分配;
模块S2:将任务分配的结果输入基于博弈论的人机零和游戏数学模型中,计算出机器人的最佳刚度值;
模块S3:将机器人刚度值和实时端点力输入机器人阻抗模型,计算出机器人末端在笛卡尔空间的参考轨迹;
模块S4:将笛卡尔空间的参考轨迹通过机器人逆运动学计算出在关节空间的参考轨迹,建立机器人的动力学模型,并确定模型参数,建立李雅普诺夫方程,推导得到自适应控制器和自适应率。
具体地,所述模块S1:
使用者和机器人共同完成的任何复杂或多进程任务都分解为多个简单的基本任务Υ={Υ
人或机器人为完成某项基本任务而进行的任务合作或者竞争行为,这些行为是基于人和机器人单独成功执行该任务所需的能力矩阵N
一个基本任务分解为:
所以复杂任务表示为:
通过上述方法可以将任务分解为简单的基本任务,通过下面的任务匹配矩阵对单个基本任务进行分配:
任务匹配矩阵反映了机器人或人对每个基本任务的适合程度,人或机器人对于某项基本任务的匹配是这是基于人的运动意图,任务匹配矩阵Φ
其中,ω
辅助矩阵Θ被定义为:
其中,
H
由于人具有较强的认知能力和决策能力,所以当任务中有许多复杂的需要决定的情况时,人是最适合领导任务的,通过末端手柄交互力传感器测量人对机器人的末端力来衡量人对某基本任务的匹配度,当人放松,末端力减少,人对基本任务的匹配度降低,该任务分配给机器人领导;当人施加较大的末端力,人对基本任务的匹配度提高,该基本任务分配给人来领导。
具体地,所述在模块S2:
某基本任务分配给人来领导时:
首先将机器人阻抗模型
在机器人阻抗模型中:M
在状态方程中:
建立人的控制目标
根据黎卡提方程计算出最佳力f
具体地,所述模块S2:
某个基本任务分配给机器人来领导时:
人和机器人的竞争交互行为可以看做看作是两方零和博弈的一种具体应用形式,即双方一方赢,另一方输,机器人的控制目标变为:
具体地,所述模块S4:
通过雅克比矩阵
其中,
τ为输出力矩;
q为关节空间角度向量;
M(q)为惯性矩阵;
D
g(q)为重力补偿矩阵;
τ
然后建立李雅普诺夫方程,推导得到自适应控制器和自适应率,通过自适应控制器计算出的控制力矩作为输入驱动弹性执行器,经过弹性执行器中的弹性组件的作用输出转矩对机器人关节进行驱动。
下面通过优选例,对本发明进行更为具体地说明。
优选例1:
本发明专利是一种面向上肢穿戴机器人的人机博弈控制系统。将使用者和机器人共同完成的复杂或多进程任务分解为多个基本任务。建立人机针对各个基本任务的能力矩阵和任务匹配矩阵进行任务分配。将任务分配的结果输入基于博弈论的人机零和或者非零和游戏数学模型中,计算机器人在人机末端匹配的最佳刚度,随后通过机器人阻抗模型,计算出机器人末端的参考轨迹,最后通过自适应控制器输出控制力矩实现参考轨迹跟踪。本发明的上肢穿戴机器人控制方法可以在人机合作的情景下实现更好的柔顺控制,感知使用者的运动意图,最小化使用者的输入力。
本发明专利的目的是通过以下技术方案来实现的:
一种面向上肢穿戴机器人的人机博弈控制系统,其特征在于:
所述控制方法包括以下步骤:
步骤1,在任务进行时利用末端手柄交互力传感器,实时记录使用者在运动时上肢的端点力数据。建立使用者和机器人各个基本任务的能力矩阵和任务匹配矩阵,每一个基本任务都根据人和机器人的能力矩阵和任务匹配矩阵进行任务分配。
步骤2,将任务分配的结果输入基于博弈论的人机零和游戏数学模型中,计算出机器人的最佳刚度值。
步骤3,将机器人刚度值和实时端点力输入机器人阻抗模型,计算出机器人末端在笛卡尔空间的参考轨迹。
步骤4,将笛卡尔空间的参考轨迹通过机器人逆运动学计算出在关节空间的参考轨迹,建立机器人关节的动力学模型,并确定模型参数,建立李雅普诺夫方程,推导得到自适应控制器和自适应率。
根据权利要求1所述的一种面向上肢穿戴机器人的人机博弈控制系统,其特征在于:在步骤1中,使用者和机器人共同完成的任何复杂或多进程任务都分解为多个简单的基本任务Υ={Υ
根据权利要求1所述的一种面向上肢穿戴机器人的人机博弈控制系统,其特 征在于:在步骤2中,如果某个基本任务分配给人来领导,根据博弈论,人和机 器人的合作交互行为可以看作是两方非零和博弈的一种具体应用形式,即双方都 是赢家,利益互补,双方的目标是使各自的控制目标最小化。首先将机器人阻抗 模型
根据权利要求1所述的一种面向上肢穿戴机器人的人机博弈控制系统,其特征在于:在步骤2中:如果某个基本任务分配给机器人来领导,人和机器人的竞争交互行为可以看做看作是两方零和博弈的一种具体应用形式,即双方一方赢,另一方输,机器人的控制目标变为:
根据权利要求1所述的一种面向上肢穿戴机器人的人机博弈控制系统,其特征在于:在步骤4中:通过雅克比矩阵
优选例2:
下面结合附图对本发明专利作进一步详述。
使用者和上肢穿戴机器人通过末端手柄交互力传感器进行人机交互在脑卒中康复、搜索救援、远程操作等方面有着广泛的应用。如图1所示,所述控制方法包括以下步骤:
所述步骤1具体为:
利用末端手柄交互力传感器,实时记录使用者在运动时上肢的端点力数据 F(f
建立使用者和机器人各个基本任务的能力矩阵,每一个基本任务都根据人和机器人的能力矩阵和能力需求矩阵和任务状态运算后进行任务分配。一个基本任务可以分解为:
所以复杂任务可以表示成:
通过上述方法可以将任务分解为简单的基本任务,通过下面的任务匹配矩阵对单个基本任务进行分配。
任务匹配矩阵反映了机器人或人对每个基本任务的适合程度,人或机器人对于某项基本任务的匹配是这是基于人的运动意图。任务匹配矩阵Φ
其中ω
其中H
所述步骤2具体为:
将任务分配的结果输入基于博弈论的人机零和游戏数学模型中,计算出机器人的最佳刚度值。
①根据博弈论,如果某基本任务分配给人来领导。人和机器人的合作交互行为可以看做看作是两方非零和博弈的一种具体应用形式,即双方都是赢家,利益互补,双方的目标是使各自的控制目标最小化。首先将机器人阻抗模型转为为状态方程:
在机器人阻抗模型中:M
建立人的控制目标和机器人的控制目标:
其中,
Γ
其中z
②如果某基本任务分配给机器人来领导。人和机器人的竞争交互行为可以看作是两方零和博弈的一种具体应用形式,即双方一方赢,另一方输,机器人的控制目标变为:
r
通过黎卡提方程计算出机器人最佳刚度u
其中可以在黎卡提方程中计算得出:
用该最佳刚度来消除施加在机器人末端力的干扰力矩。
步骤3,将机器人刚度值和实时端点力输入机器人阻抗模型,计算出机器人末端在笛卡尔空间的参考轨迹。实时端点力由力传感器获得。
所述步骤4具体为:
根据牛顿欧拉法建立机器人关节动力学模型为:
其中:
1)M(q)为对称正定矩阵;
2)
机器人动力学模型中
其中:
弹性执行器系统动力学模型为:
通过雅克比矩阵
自适控制器和自适应率如下所示:
其中,
其中,
M
所述的自适应控制器和自适应更新率的推导及其稳定性证明过程如下所示:
根据机器人动力学
将Lyapunov函数定义为V:
其中:
对V求导得到:
自适应控制器τ和自适应率设计为:
将上式代入
将
其中:
N=[S
选择参数Λ
其中:λ
对(32)式求导得:
由上式可以看出
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 面向上肢穿戴机器人的人机博弈控制方法及系统
- 面向上肢穿戴机器人的人机博弈控制方法及系统