一种电力机车保护逻辑测试系统及方法
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及电力牵引控制单元设备领域,具体而言,尤其涉及一种电力机车保护逻辑测试系统及方法。
背景技术
电力机车牵引控制单元长期工作在高温振动的不利条件下,发生故障的几率比较大,诊断的难度也比较大。因此,在进行地面试验和环铁试验前,在半实物仿真平台上测试电力机车的保护逻辑是十分有必要的。
电力机车牵引系统保护算法验证方案,由于电力机车运行环境构建复杂、费用高、系统验证难度大等缺点,不能满足在实验室中验证电力机车的牵引控制系统保护逻辑的测试要求。
发明内容
本发明提供了一种电力机车保护逻辑测试系统及方法。能够解决难以频繁实车验证控制保护算法以及现有仿真技术中未仿真整车环境的问题,实现整车环境下对电传动控制器的实时测试,降低测试成本,缩短调试周期。
本发明采用的技术手段如下:
一种电力机车保护逻辑测试系统,包括:电力机车电传动控制系统、信号调理系统以及仿真系统;其中,
所述电力机车电传动控制系统用于输出机车传动控制信号,以控制机车的牵引状态;
所述信号调理系统通过航插接口与电力机车电传动控制系统连接,用于对所述电力机车传动控制信号进行转换,生成能够直接被仿真系统接收和识别的模拟机车传动控制信号;
所述仿真系统基于数字建模技术模拟构建整车环境,并响应所述模拟机车传动控制信号,在虚拟整车环境下记录使整车牵引状态变化,以及产生的虚拟控制反馈信号和虚拟速度信号,并通过所述信号调理系统对所述虚拟控制反馈信号和虚拟速度信号进行逆处理生成能够被电力机车电传动控制系统读取的信号,从而生成电力机车电传动控制系统的控制闭环。
进一步地,系统还包括故障识别系统,所述故障识别系统对仿真系统产生的虚拟控制反馈信号和虚拟速度信号进行分类,从而识别出异常信号数据以及导致异常数据的故障名称。
进一步地,所述仿真系统包括用于模拟三相异步电机工作的电动机模型和用于模拟四象限整流器的四象限模型。
一种电力机车保护逻辑测试方法,基于上述系统实现,包括:
生成保护逻辑测试模型,所述保护逻辑测试模型基于MATLAB搭建,经编译后生成给定故障信号;
将所述给定故障信号输入电力机车电传动控制系统,所述电力机车电传动控制系统采集到故障信号后,对故障名称进行识别,并针对该故障级别的采取相应的保护动作,输出在故障状态下的机车传动控制信号;
仿真系统响应于在故障状态下的机车传动控制信号所产生虚拟故障控制反馈信号和虚拟故障速度信号;
通过信号调理系统对所述虚拟故障控制反馈信号和虚拟故障速度信号进行转换,生成能够直接被牵引控制单元系统接收和识别的系统状态变量信号,根据判断条件判别故障信号所属故障类型,并采取相应故障的保护动作。
较现有技术相比,本发明具有以下优点:
1、本发明采用硬件在环实时仿真技术,即将控制器与在计算机上实现的控制对象模型链接,进行仿真实验。系统可以真实地反应控制器的动态特性、静态特性和非线性因素等。
2、本发明满足在实验室中验证电力机车软件保护逻辑测试要求,解决了电力机车运行环境构建复杂、费用高、系统验证难度大等问题。
基于上述理由本发明可在电力机车模型测试领域广泛推广。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
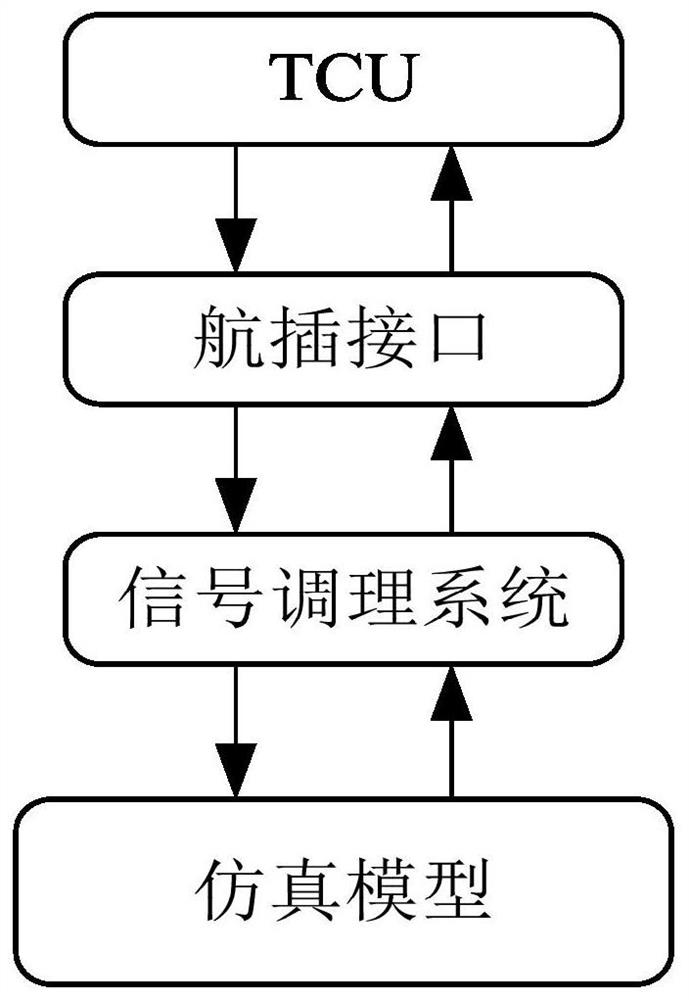
图1为本发明系统结构示意图。
图2为实施例中三相异步电机两相静止坐标系等效电路图。
图3为实施例中单相四象限主电路拓扑图
图4为实施例中四象限变流器等效电路
图5为实施例中斩波电流保护逻辑测试模型示意图。
图6为实施例中过压保护逻辑测试模型示意图。
图7为实施例中四象限输入电流保护逻辑测试模型示意图。
图8为实施例中逆变器输出电流保护逻辑测试模型示意图。
图9为实施例中上位机监控界面示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
本发明提供了一种电力机车保护逻辑测试系统,包括:电力机车电传动控制系统(TCU)、信号调理系统以及仿真系统;其中,电力机车电传动控制系统用于输出机车传动控制信号;信号调理系统通过航插接口与电力机车电传动控制系统连接,用于对所述机车传动控制信号进行转换,使转换后的信号能够直接被仿真系统接收和识别;仿真系统基于数字建模技术模拟构建整车环境,并响应所述转换后的机车传动控制信号,使整车运行状态发生变化,进而产生的控制反馈信号、速度信号以及电流电压信号,并通过所述信号调理系统传送给电力机车电传动控制系统形成闭环控制。
其中,电力牵引传动系统是轨道交通运输装备的核心部件,其主要作用是给牵引电机提供合适的电能,使牵引电机在不同的工况和特性条件下实现电能与机械能的相互转换。因此,电力牵引传动技术实质上就是牵引电机的变速传动技术。
电力机车电传动控制系统将控制信号及脉冲信号通过信号调理系统传给仿真系统,仿真系统中电力机车的弓网模型、四象限模型、逆变器模型运行,产生的控制反馈信号、速度信号以及电流电压信号通过信号调理系统传送给TCU形成闭环控制,由此形成电力机车保护逻辑半实物仿真平台。
具体来说,仿真系统根据机车传动控制信号的状态,实时计算更新反馈控制信号、速度信号以及电压电流信号。其中反馈控制信号通过信号调理系统将5V转换成15V的TTL数据,再通过光电箱将15V电信号转换为光信号,输出至TCU。速度信号通过仿真系统的计算,将某一速度值转换成相对应脉宽频率的速度脉冲数据,模拟电机光栅装置采集速度信号。电压电流信号为模拟量数据,输出4种范围的电流源信号,包括-100mA~+100mA,-250mA~+250mA,-500mA~+500mA,-1A~+1A。
进一步地,基于仿真系统与TCU进行交互的数据有PWM脉冲信号,PWM脉冲反馈信号,模拟量信号有中间电压信号,四象限输入电流信号,电机电流信号,速度信号等,数字量信号有主断信号,主接触器信号,充电接触器信号,四象限跳主断信号,逆变器跳主断信号等。
在本发明的一个优选例1中,电动机模型包括:
电压方程:
磁链方程:
转矩方程:
T
三相异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,本实施例在忽略空间谐波、磁路饱和、铁芯损耗和温度及频率变化对电阻影响的情况下,对异步电机进行等效建模。如图2所示为将三相转子绕组折算到定子侧,并且分解到两相静止坐标系上的等效电路图。
对于牵引控制系统来说,四象限整流器是整个系统的重要组成部分。四象限整流器可以保持牵引供电网功率因数接近1,并使网侧电流接近正弦波,提高了牵引供电网的经济效益,同时,四象限整流器具有良好的稳压效果,当负载和网压发生变化时,能够维持中间直流电压的恒定。基于上述优选例1的进一步优选例2,如图3所示为带二次滤波回路的单相四象限的主电路拓扑图,其中VT1-VT4为4个由IGBT反并联二极管构成的开关器件。Cd为支撑电容,RL为负载电阻。
由基尔霍夫定律得
定义理想开关函数为:
由图4可得四象限变流器的数学模型为
此外,系统还包括故障识别系统,其用于对仿真系统产生的虚拟控制反馈信号和虚拟速度信号进行分类,从而识别出异常信号数据以及导致异常数据的故障名称。
本发明还公开了一种电力机车保护逻辑测试方法,基于上述系统实现,其特征在于,包括:
生成保护逻辑测试模型,所述保护逻辑测试模型基于MATLAB搭建,经编译后生成给定故障信号;
将所述给定故障信号输入电力机车电传动控制系统,所述电力机车电传动控制系统采集到故障信号后,对故障名称进行识别,并针对该故障级别的采取相应的保护动作,输出在故障状态下的机车传动控制信号;
仿真系统响应于在故障状态下的机车传动控制信号所产生虚拟故障控制反馈信号和虚拟故障速度信号;
通过信号调理系统对所述虚拟故障控制反馈信号和虚拟故障速度信号进行转换,生成能够直接被牵引控制单元系统接收和识别的系统状态变量信号,根据判断条件判别故障信号所属故障类型,并采取相应故障的保护动作。
具体来说,本发明的控制结构图如附图5所示,该平台采用硬件在环实时仿真技术,即将控制器与在计算机上实现的控制对象模型链接,进行仿真实验。被测系统为真实的控制器,被控对象为在matlab里搭建的电动机模型、四象限模型、逆变器模型。
进行模型测试前,首先通过MATLAB中搭建故障模型,编译生成.sdf文件,下载到上位机界面Controldesk里,在Controldesk上给定故障信号,然后故障信号通过仿真机柜的调理板卡输出至牵引控制单元机箱,当牵引控制单元机箱的信号板检测到仿真系统的信号后,判断是否满足故障条件,若满足故障条件,DSP程序软件报出相应的故障,然后采取相应的措施解决报出的故障。
针对故障的不同等级,会采取不同程度的保护措施,本发明专利以中间直流侧过压故障为例,当仿真系统由正常运行的状态切换到故障状态后,DSP程序软件报出中间直流侧过压故障,5s后故障自动复位,若2min内只报一次该故障,DSP程序软件自动复位后,将故障信息清除;若2min内重复触发2次该故障后,DSP程序软件将不再进行复位指令,并向仿真系统下发分主断指令,避免牵引控制系统长时间运行在过压的状态。
如图5所示,为斩波电流保护逻辑测试模型,其中测试功能包括正常运行模型、斩波过流故障模式、未斩有流故障模式、斩波无流故障模式和斩波超温故障模式。
模型的输入信号为斩波电流信号Ichop、斩波脉冲信号Ichop_pwm;输出信号为实际斩波电流。模型的主要模块有goto,from,switch,MultiportSwitch。通过设置ichop_fault_selection1的数值,可以选择不同的故障模式。
当ichop_fault_selection1=1时,即输出Multiport Switch第1通道的数值,为正常运行模式下的斩波电流;
当ichop_fault_selection1=2时,即输出Multiport Switch第2通道的数值,为斩波过流故障模式,实际输出斩波电流的大小为900A;
当ichop_fault_selection1=3时,即输出Multiport Switch第3通道的数值,为未斩有流故障模式,在未发出斩波脉冲的情况下,实际输出电流大于100A并持续20ms;
当ichop_fault_selection1=4时,即输出Multiport Switch第4通道的数值,为斩波无流故障模式,在发出斩波脉冲的情况下,实际输出电流小于100A并持续20ms;
当ichop_fault_selection1=5时,即输出Multiport Switch第5通道的数值,为斩波无流故障模式,设置中间电压为3200V,在发出斩波脉冲的情况下,实际输出电流105A,10s后,程序计算斩波电阻温度>170℃,报出斩波超温故障;
图6为中间电压过压保护逻辑测试模型,其中包括硬件过压和软件过压。
模型的输入信号为中间电压信号Udc_4QC,输出信号为实际中间电压。模型的主要模块有goto,from,switch,Multiport Switch。通过设置Udc_fault_selection的数值,可以选择不同的故障模式。
当Udc_fault_selection=1时,即输出Multiport Switch第1通道的数值,为正常运行模式下的中间电压;
当Udc_fault_selection=2时,即输出Multiport Switch第2通道的数值,为中间电压软件过压故障模式,实际输出中间电压的大小为4000V;
当Udc_fault_selection=3时,即输出Multiport Switch第3通道的数值,为中间电压硬件过压故障模式,实际输出中间电压的大小为4200V;
图7为四象限输入电流保护逻辑测试模型,其中四象限输入电流硬件过流、四象限输入电流软件过流、四象限输入电流传感器故障保护逻辑。
模型的输入信号为四象限输入电流信号Is1,输出信号为实际四象限输入电流。模型的主要模块有goto,from,switch,Multiport Switch。通过设置is1_fault_selection1的数值,可以选择不同的故障模式。
当is1_fault_selection1=1时,即输出Multiport Switch第1通道的数值,为正常运行模式下的四象限输入电流;
当is1_fault_selection1=2时,即输出Multiport Switch第2通道的数值,为四象限输入电流软件过流故障模式,实际输出四象限输入电流的大小为1942A;
当is1_fault_selection1=3时,即输出Multiport Switch第3通道的数值,为四象限输入电流硬件过流故障模式,实际输出四象限输入电流的大小为1948A;
图8为逆变器输出电流保护逻辑测试模型,其中包括逆变器输出电流硬件过流保护逻辑测试模型、逆变器输出电流软件过流保护逻辑测试模型。
模型的输入信号为电机U相电流信号Ia_inv1,输出信号为实际电机U相电流。模型的主要模块有goto,from,switch,Multiport Switch。通过设置ia_fault_selection2的数值,可以选择不同的故障模式。
当ia_fault_selection2=1时,即输出Multiport Switch第1通道的数值,为正常运行模式下的电机U相电流;
当ia_fault_selection2=2时,即输出Multiport Switch第2通道的数值,为电机U相电流软件过流故障模式,实际输出电机U相电流的大小为1150A;
当ia_fault_selection2=3时,即输出Multiport Switch第3通道的数值,为电机U相电流硬件过流故障模式,实际输出电机U相电流的大小为1343A;
图9为上位机监控界面,将MATLAB编译生成的.sdf文件下载到上位机界面观测变量。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种电力机车保护逻辑测试系统及方法
- 电力机车受电弓碳板与铜导线摩擦性能测试系统及方法