系统、方法和程序
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及管理预测模型的系统、方法和程序。
背景技术
在机器学习中,通过从用于学习的输入数据理解特征来学习预测模型,并使用完全学习的预测模型来进行实际操作。在现有技术中,已知如下系统,该系统通过利用使用这种预测模型的预测输入数据来预测特定事件。
在进行这种预测的系统中,为了通过使用各种类型的输入数据进行预测来提高预测精度,输入数据通常为多维向量。顺便提及,当输入数据的维数很大时,除了庞大的计算学习成本之外,还存在以下问题:需要大量的学习数据来适当地学习特征。众所周知,当多维向量的维数很大时,学习精度实际上会劣化。这是因为,由于维数的增加,多维向量所取的特征的宽度呈指数扩展,因此从有限量的输入数据不能充分地理解特征。
因此,在现有技术中,研究了降低学习输入数据的维数。例如,日本特开2011-197934号公报公开了一种发明,其中降维处理包括将对学习的贡献程度(以下称为学习贡献率)低的参数设置为降维对象。
为了从多维学习输入数据适当地理解和学习特征,如上所述,有必要结合降维处理。然而,在日本特开2011-197934号公报中,降维处理只是不使用降维的参数。因此,当在降低之前,对各构造(configuration)(例如,设备、传感器或软件)中收集的降维的参数进行获取、发送等时,即使进行了降维处理也会不断收集降维的参数。在这种情况下,存在如下问题:浪费了用于获取降维的参数的构造和发生的通信处理的操作成本。
发明内容
本发明的目的在于降低在机器学习中进行预测的系统中浪费的操作成本。
根据本发明的实施例,一种系统管理利用在学习处理中包括多个参数的输入数据而生成的预测模型并且包括:第一计算单元,其被构造为,根据学习结果计算所述多个参数中的各个参数的学习贡献率;第一指定单元,其被构造为,根据由所述第一计算单元计算出的学习贡献率,来指定学习贡献率低的参数;第一指令单元,其被构造为,给出使用排除由所述第一指定单元指定的参数的输入数据的再学习指令;第二指定单元,其被构造为,指定与由所述第一指定单元指定的参数相对应的构造(configuration);以及第一发布单元,其被构造为,发布用于由所述第二指定单元指定的构造的停止命令。
通过以下参照附图对示例性实施例的描述,本发明的其他特征将变得清楚。
附图说明
图1是示出根据本发明的示例1的信息处理系统的构造的框图。
图2A是示出参数优化系统101和网关设备102的硬件构造的框图。
图2B是示出参数获取设备103的硬件构造的框图。
图3是示出参数优化系统101的功能构造的框图。
图4是示出网关设备102的功能构造的框图。
图5是示出参数获取设备103的功能构造的框图。
图6A是根据本发明的示例1的序列图。
图6B是示出根据本发明的示例1的学习贡献确定单元304中的处理流程的流程图。
图7A是根据本发明的示例2的序列图。
图7B是示出根据本发明的示例2的学习贡献确定单元304中的处理流程的流程图。
图8A是根据本发明的示例3的序列图。
图8B是示出根据本发明的示例3的学习贡献确定单元304中的处理流程的流程图。
具体实施方式
下文中将参照附图详细描述用于实现本发明的模式。
[示例1]
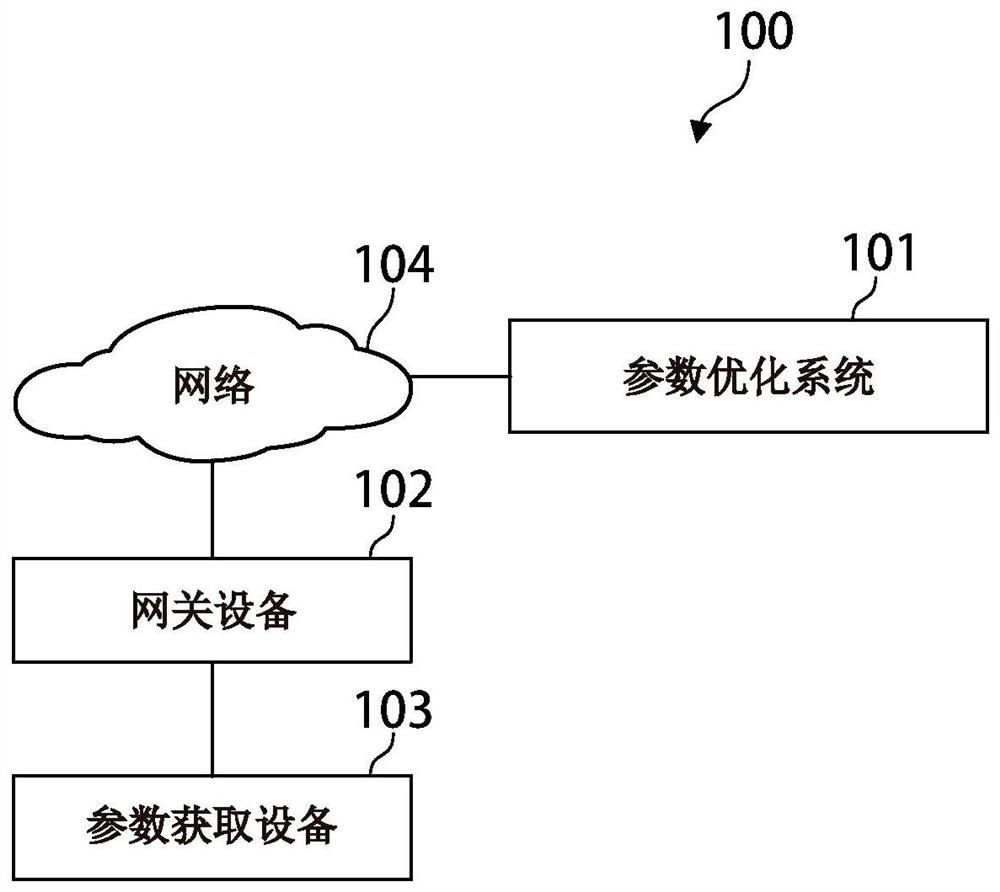
图1是示出根据本发明的示例1的信息处理系统的构造的框图。
根据该示例的信息处理系统100是包括一个或多个参数获取设备103和使用由参数获取设备103获取的参数进行学习和预测的机器学习系统的系统。在该示例中,假定机器学习系统包含在参数优化系统101中。在该示例中,针对要获取的各个参数设置参数获取设备103。信息处理系统100是管理预测模型的系统。
作为在该示例中探讨的学习和预测处理的具体示例,可以例示汽车的自动驾驶。
根据该示例的信息处理系统100在手动驾驶时将驾驶员的行为作为答案标签分配给安装在汽车中的各种构造中收集的参数,并生成监督数据,即学习输入数据。安装在汽车中的各种构造是诸如图像传感器、距离传感器和加速度传感器的参数获取设备103。表1是示出监督数据的示例的表。信息处理系统100通过准备和学习如表1所示的许多监督数据来生成预测模型。
[表1]
在实际操作中,信息处理系统100根据由GPS获取的当前值坐标、由用户输入的目的地坐标以及道路信息来确定路线。GPS是全球定位系统的缩写。信息处理系统100通过将由参数获取设备103收集的实时参数输入到预测模型、预测(确定)下一个行为并操作汽车,来沿着所确定的路线行进。表2是示出预测时的参数和预测结果的示例的表。
[表2]
如该示例中将本发明应用于汽车的自动驾驶仅仅是本发明的一个示例。本发明可以应用于例如智能家居、飞机、轮船、诸如无人机的机器人、包括打印设备和扫描器中的至少一个的图像处理设备、3D打印机、以及包括多个参数获取设备的通信中继设备中的任意一个。即,根据本发明的预测模型可以应用于对智能家居、飞机、轮船、诸如无人机的机器人、包括打印设备和扫描器中的至少一个的图像处理设备、3D打印机、以及通信中继设备中的任意一个的任意控制。
信息处理系统100通过经由网络104将参数优化系统101连接到网关设备102来构造。网络104例如是基于HTTP的网络。HTTP是超文本传输协议的缩写。参数获取设备103使用测量设备来数字化并获取各种物理量。网关设备102用作防火墙。另外,网关设备102对参数获取设备103进行操作控制。例如,网关设备102选择对由参数获取设备103收集的参数的经由网络104的发送。
在该示例中,参数获取设备103的示例包括安装在汽车中的图像传感器、距离传感器、加速度传感器和GPS终端。网关设备102被安装在汽车中,并且进行对参数获取设备103的操作控制、对由参数获取设备103收集的参数的发送控制等。网关设备102的示例是连接到网络104的IoT控制模块。IoT是物联网(Internet of Things)的缩写。网关设备102经由网络104周期性地或非周期性地向参数优化系统101发送由参数获取设备103获取的参数值。参数优化系统101基于接收到的参数值进行学习处理和预测处理。参数优化系统101可以经由网络104向网关设备102发送用于参数获取设备103的控制命令。
图2A是示出参数优化系统101和网关设备102的硬件构造的框图。在该示例中,参数优化系统101的硬件构造和网关设备102的硬件构造相同,因此将参照图2A描述两种硬件构造。RAM 201是临时记录数据的存储器。ROM 202是记录嵌入式程序和数据的存储器。网络接口203是经由网络104与连接到网络104的其他计算机和网络设备进行通信的接口。用于网络接口203和网络104的通信方案可以是有线方案和无线方案中的一种。二级存储设备205是以HDD或闪存为代表的存储设备。CPU 200执行从RAM 201、ROM 202、二级存储设备205等读取的程序。CPU 200、RAM 201、ROM 202、网络接口203和二级存储设备205经由系统总线204相互连接。除非另外说明,否则本示例中的系统总线204是将来自CPU 200的控制命令传播到连接到系统总线204的硬件的总线。
图2B是示出参数获取设备103的硬件构造的框图。网络接口206是经由网络104与连接到网络104的其他计算机和网络设备进行通信的接口。用于网络接口203和网络104的通信方案可以是有线方案和无线方案中的一种。参数获取设备核心207对现实世界的各种物理量进行测量和数字化。通过网络接口206将由参数获取设备核心207测量并数字化的参数经由网络104发送到连接到网络104的其他计算机和网络设备。
图3是示出参数优化系统101的功能构造的框图。通过使CPU 200执行存储在RAM201、ROM 202、二级存储设备205等中的程序,来实现参数优化系统101的功能构造。
首先,将描述学习时的处理流程。参数优化系统101的收集数据接收单元300接收由参数获取设备103收集并经由网关设备102发送的参数作为收集数据。收集数据包括多个参数。输入数据生成单元301对由收集数据接收单元300接收的收集数据进行预处理,并处理收集数据以获得输入数据。表3中示出了预处理之前的收集数据和预处理之后的输入数据的示例。
[表3]
参数优化系统101将通过预处理而处理的输入数据存储在输入数据存储单元302中。学习处理单元303从输入数据存储单元302中读取输入数据并进行学习处理。学习处理单元303通过学习处理生成预测模型。在该示例中,假定在机器学习算法中使用多层神经网络。在此,这是示例性的,并且即使在使用其他机器学习算法时也可以应用本发明。
学习贡献确定单元304根据在学习处理单元303中通过学习处理而生成的预测模型,计算收集数据中包括的各参数的学习贡献率。在学习贡献率的计算中,可以利用机器学习算法而使用各种方案。然而,当以此时处理N维输入数据的3层神经网络为例进行描述时,可以在下面的计算表达式(1)中获得输入数据中第n维参数的学习贡献率。W
学习贡献确定单元304根据计算出的学习贡献率来确定学习贡献率低的参数(以下称为低贡献参数)。即,学习贡献确定单元304根据计算出的学习贡献率来指定学习贡献率低的参数。在表4中示出低贡献参数和由学习贡献确定单元304根据学习结果计算出的学习贡献率的示例。在表4中,第一图像传感器、第二图像传感器、第一距离传感器、第二距离传感器、第三距离传感器和加速度传感器中的各个是参数获取设备103的示例。第一图像传感器和第二图像传感器中的各个是获取多个参数的设备。第一距离传感器、第二距离传感器、第三距离传感器和加速度传感器中的各个是获取一个参数的设备。在该示例中,例如,将学习贡献率0.0005设置为阈值,将学习贡献率小于阈值的参数设置为低贡献参数,并且没有将学习贡献率等于或大于阈值的参数设置为低贡献参数。在这种情况下,在表4中,由第二距离传感器(学习贡献率为0.0002)和第三距离传感器(学习贡献率为0.0004)获取的参数是低贡献参数。
[表4]
参数优化系统101将关于由学习贡献确定单元304确定的低贡献参数的信息发送给学习处理单元303。控制命令发送单元305将用于参数获取设备103的操作停止命令发送给网关设备102,参数获取设备103获取被学习贡献确定单元304认为是低贡献参数的参数。在表4的情况下,控制命令发送单元305将用于第二距离传感器和第三距离传感器的操作停止命令发送给网关设备102。
顺便提及,在该示例中,例如,对于第一图像传感器和第二图像传感器,通过一个传感器获取多个像素数据,并将获取的多个像素数据设置为多个参数。以这种方式,当从一个参数获取设备103获取多个参数时,所获取的多个参数被认为是包括学习贡献率小于阈值的参数和学习贡献率等于或大于阈值的参数。
因此,在该示例中,当从一个参数获取设备103获取多个参数并且所有多个参数的学习贡献率均小于阈值时,学习贡献确定单元304将多个参数设置为低贡献参数。当从一个参数获取设备103获取多个参数并且多个参数中的任何一个的学习贡献率等于或大于阈值时,学习贡献确定单元304不将多个参数设置为低贡献参数。
在该示例中,当从一个参数获取设备103获取多个参数并且多个参数的学习贡献率的和值小于和值阈值时,学习贡献确定单元304将多个参数设置为低贡献参数。当从一个参数获取设备103获取多个参数并且多个参数的学习贡献率的和值等于或大于和值阈值时,学习贡献确定单元304不将多个参数设置为低贡献参数。
如上所述,控制命令发送单元305发送用于参数获取设备103的操作停止命令,参数获取设备103获取被学习贡献确定单元304认为是低贡献参数的多个参数。
当从一个参数获取设备103获取多个参数并且多个参数中的任何一个的学习贡献率小于阈值时,学习贡献确定单元304可以将多个参数设置为低贡献参数。在这种情况下,当从一个参数获取设备103获取多个参数并且所有多个参数的学习贡献率等于或大于阈值时,学习贡献确定单元304可以将多个参数设置为低贡献参数。
在从学习贡献确定单元304接收关于低贡献参数的信息之后,学习处理单元303从输入数据存储单元302中获取输入数据,从获取的输入数据中排除低贡献参数,并再次进行学习处理。参数优化系统101将通过学习处理生成的预测模型存储在预测模型存储单元306中。
接下来,将描述预测时的处理流程。首先,参数获取设备103收集参数。随后,参数获取设备103经由网关设备102将参数发送到参数优化系统101。参数优化系统101使收集数据接收单元300从网关设备102接收参数作为收集数据。输入数据生成单元301对由收集数据接收单元300接收到的收集数据进行预处理,以将其处理为输入数据。参数优化系统101将由输入数据生成单元301处理的输入数据存储在输入数据存储单元302中。预测处理单元307从预测模型存储单元306获取预测模型,并将从输入数据存储单元302获取的输入数据输入到预测模型。预测处理单元307将由预测模型输出的预测结果发送到输出单元308。输出单元308输出来自预测处理单元307的预测结果。输出单元308进行的输出处理可以是以下处理中的任何一个:在画面上显示预测结果、将预测结果作为声音输出、通过电子邮件或聊天发送预测结果、将预测结果存储在存储设备中、使打印设备打印预测结果以及进行控制以将预测结果发送到设备。由输出单元308进行的输出处理可以是上述处理的组合。表2中示出了预测结果和由参数获取设备103收集的参数的示例。
图4是示出网关设备102的功能构造的框图。通过使CPU 200执行存储在RAM 201、ROM 202、二级存储设备205等中的程序来实现网关设备102的功能构造。
在网关设备102中,参数接收单元404周期性地或在预定定时接收从参数获取设备103发送的参数。网关设备102经由参数发送控制单元403将接收到的参数从参数发送单元402发送到参数优化系统101。在网关设备102中,控制命令接收单元400接收从参数优化系统101发送的控制命令,并且参数获取设备控制单元401根据接收到的控制命令来控制参数获取设备103。例如,当控制命令接收单元400接收到用于多个参数获取设备103当中的特定参数获取设备103的操作停止命令时,参数获取设备控制单元401进行控制,使得停止特定参数获取设备103的操作。
图5是示出参数获取设备103的功能构造的框图。通过使参数获取设备103的CPU执行程序和/或通过硬件来实现参数获取设备103的功能构造。参数获取设备103的操作是通过从网络接口206发送由参数获取设备核心207收集的参数来实现的。参数获取设备103将由参数获取单元501收集的参数从参数发送单元500发送至网关设备102。
图6A是根据本发明的示例1的序列图。图6B是示出根据本发明的示例1的学习贡献确定单元304中的处理流程的流程图。在图6A中,为了促进可见性,省略了不进行除了发送和接收处理之外的处理的控制命令发送单元305和控制命令接收单元400。
学习处理单元303从输入数据存储单元302获取用于计算学习贡献率的输入数据(图6A的步骤S600)。学习处理单元303使用在步骤S600中获取的输入数据来进行学习处理(图6A的步骤S601),并将学习结果发送到学习贡献确定单元304(图6A的步骤S602)。
学习贡献确定单元304接收在步骤S602中发送的学习结果,从接收到的学习结果中获取包括输入数据的参数的学习贡献率,并将学习贡献率低的参数设置为低贡献参数(图6A和图6B的步骤S603)。即,学习贡献确定单元304指定学习贡献率低的参数。学习贡献确定单元304基于步骤S603的低贡献参数的确定信息,将排除低贡献参数的再学习命令发送到学习处理单元303(图6A和图6B的步骤S604)。即,学习贡献确定单元304给出指令,以使用排除被指定为低贡献参数的参数的输入数据进行再学习。
学习处理单元303接收在步骤S604中发送的再学习命令,并且响应于接收到的再学习命令,从输入数据存储单元302中获取排除低贡献参数的学习输入数据(图6A的步骤S605)。学习处理单元303使用在步骤S605中获取的学习输入数据来进行学习处理(图6A的步骤S606)。学习处理单元303将通过步骤S606的学习处理生成的预测模型存储在预测模型存储单元306中,并通过自动或手动操作将该预测模型替换为实际操作期间的预测模型。
学习贡献确定单元304确定获取被认为是低贡献参数的参数的参数获取设备103(图6A和图6B的步骤S607)。即,学习贡献确定单元304在步骤S607中指定获取被认为是低贡献参数的参数的参数获取设备103。获取被认为是低贡献参数的参数的参数获取设备103是与指定参数相对应的构造的示例。学习贡献确定单元304经由控制命令发送单元305将用于在步骤S607中指定的参数获取设备103的操作停止命令发送到网关设备102的控制命令接收单元400(图6A和图6B的步骤S608)。即,学习贡献确定单元304是发布单元的示例,该发布单元发布用于作为指定构造的参数获取设备103的停止命令。控制命令接收单元400接收在步骤S608中发送的操作停止命令。参数获取设备控制单元401进行控制,使得响应于控制命令接收单元400接收到的操作停止命令,停止在步骤S607中指定的参数获取设备103的操作(图6A的步骤S609)。
[示例2]
在示例2中,由于系统构造、硬件构造和各个构造的框图与示例1中的图1至图5所示的相同,因此将省略对这些构造的框图的描述,并且可以参照图1至图5。
图7A是根据本发明的示例2的序列图。图7B是示出根据本发明的示例2的学习贡献确定单元304中的处理流程的流程图。在图7A中,为了促进可见性,省略了不进行除了发送和接收处理之外的处理的控制命令发送单元305和控制命令接收单元400。
学习处理单元303从输入数据存储单元302获取用于计算学习贡献率的输入数据(图7A的步骤S700)。学习处理单元303使用在步骤S700中获取的输入数据来进行学习处理(图6A的步骤S701),并将学习结果发送到学习贡献确定单元304(图7A的步骤S702)。
学习贡献确定单元304接收在步骤S702中发送的学习结果,从接收到的学习结果中获取包括输入数据的参数的学习贡献率,并将学习贡献率低的参数设置为低贡献参数(图7A和图7B的步骤S703)。学习贡献确定单元304基于步骤S703的低贡献参数的确定信息,将排除低贡献参数的再学习命令发送给学习处理单元303(图7A和图7B的步骤S704)。即,学习贡献确定单元304给出指令以使用排除被指定为低贡献参数的参数的输入数据进行再学习。
学习处理单元303接收在步骤S704中发送的再学习命令,并且响应于接收到的再学习命令,从输入数据存储单元302中获取排除低贡献参数的学习输入数据(图7A的步骤S705)。学习处理单元303使用在步骤S705中获取的学习输入数据来进行学习处理(图7A的步骤S706)。学习处理单元303将通过步骤S706的学习处理而生成的预测模型存储在预测模型存储单元306中,并通过自动或手动操作将该预测模型替换为实际操作期间的预测模型。
学习贡献确定单元304确定获取被认为是低贡献参数的参数的参数获取设备103(图7A和图7B的步骤S707)。即,学习贡献确定单元304在步骤S707中指定获取被认为是低贡献参数的参数的参数获取设备103。
在该示例中,学习贡献确定单元304确定可以参照参数获取设备103当中的、与用于学习处理的学习贡献率无关地恒定操作的参数获取设备103的列表(以下称为恒定操作参数获取设备列表)。恒定操作参数获取设备列表被预先存储在诸如参数优化系统101的RAM 201、ROM 202和二级存储设备205的存储设备中。
学习贡献确定单元304确定获取被认为是低贡献参数的参数的参数获取设备103是否包括在恒定操作参数获取设备列表中(图7A和图7B的步骤S708)。当获取被认为是低贡献参数的参数的参数获取设备103不包括在恒定操作参数获取设备列表中时(图7B的步骤S708中为“否”),处理进行至图7A和图7B的步骤S709。当获取被认为是低贡献参数的参数的参数获取设备103包括在恒定操作参数获取设备列表中时(图7B的步骤S708中为“是”),处理进行至图7A和图7B的步骤S711。即,学习贡献确定单元304使处理根据获取被认为是低贡献参数的参数的参数获取设备103是否包括在恒定操作参数获取设备列表中而不同。
学习贡献确定单元304在图7A和图7B的步骤S709中,经由控制命令发送单元305将用于在步骤S707中指定的参数获取设备103的操作停止命令发送到网关设备102的控制命令接收单元400。控制命令接收单元400接收在步骤S709中发送的操作停止命令。参数获取设备控制单元401进行控制,使得响应于控制命令接收单元400接收到的操作停止命令,停止在步骤S707中指定的参数获取设备103的操作(图7A的步骤S710)。
学习贡献确定单元304在图7A和图7B的步骤S711中,经由控制命令发送单元305将用于在步骤S707中指定的参数获取设备103的通信停止命令发送至网关设备102的控制命令接收单元400。控制命令接收单元400接收在步骤S709中发送的通信停止命令。参数发送控制单元403进行控制,使得响应于控制命令接收单元400接收到的通信停止命令,停止发送由在步骤S707中指定的参数获取设备103获取的参数(图7A的步骤S711)。
[示例3]
在示例3中,由于系统构造、硬件构造和各个构造的框图与示例1中的图1至图5所示的相同,因此将省略对这些构造的框图的描述,并且可以参照图1至图5。
图8A是根据本发明的示例3的序列图。图8B是示出根据本发明的示例3的学习贡献确定单元304中的处理流程的流程图。在图8A中,为了促进可见性,将省略其中不进行除了该示例中的发送和接收处理之外的处理的构造以及其中仅对收集数据进行预处理的构造。在该示例中,假定通过示例1和示例2中描述的功能预先停止一些参数获取设备103的操作。
在该示例中,参数获取设备控制单元401在预定的定时,将临时操作命令发送到已经停止操作的参数获取设备103(以下称为使用停止的参数获取设备)(图8A的步骤S800和S801)。参数获取设备控制单元401发送临时操作命令的预定定时可以是给定的周期性定时,可以是非周期性定时,或者可以是与预定事件的发生相对应的定时。参数获取设备控制单元401可以响应于手动操作将临时操作命令发送到使用停止的参数获取设备。
接收到临时操作命令的使用停止的参数获取设备进行操作以获取参数(图8A的步骤S802)。网关设备102将在步骤S802中由参数获取设备103获取的参数发送到参数优化系统101(图8A的步骤S803)。网关设备102经由参数接收单元404、参数发送控制单元403和参数发送单元402发送参数。
参数优化系统101接收在步骤S802中由参数获取设备103获取的参数,并且经由收集数据接收单元300和输入数据生成单元301将接收到的参数累积在输入数据存储单元302中。当在步骤S802中由参数获取设备103获取的参数被充分地累积在输入数据存储单元302中时,学习处理单元303从输入数据存储单元302获取用于计算学习贡献率的输入数据(图8A的步骤S804)。当满足预定条件时,假定参数被充分地累积在输入数据存储单元302中。预定条件例如是如下条件,即,在使用停止的参数获取设备的操作之后累积的输入数据的数量超过阈值。
学习处理单元303使用在步骤S804中获取的输入数据来进行学习处理(图8A的步骤S805)。学习处理单元303将在步骤S805中学习的学习结果发送到学习贡献确定单元304(图8A的步骤S806)。学习贡献确定单元304接收在步骤S806中发送的学习结果,从接收到的学习结果中获取输入数据中包括的参数的学习贡献率,并将学习贡献率低的参数设置为低贡献参数(图8A和图8B的步骤S807)。
学习贡献确定单元304确定由临时操作的使用停止的参数获取设备获取的参数(以下称为使用停止的参数)的学习贡献率是否为低而不从先前学习时的学习贡献率改变(图8A和图8B的步骤S808)。即,在图8B的步骤S808中,即使在步骤S805的学习中,学习贡献确定单元304也确定使用停止的参数是否是低贡献参数。当学习贡献确定单元304确定使用停止的参数是低贡献参数而不从先前学习时的参数改变时(图8B的步骤S808中为“是”),处理按原样结束。当学习贡献确定单元304确定使用停止的参数从先前学习时的参数改变并且不是低贡献参数(它们充分贡献)时(图8B的步骤S808中为“否”),处理进行到图8A和图8B的步骤S809。学习贡献确定单元304在图8A和图8B的步骤S808中向学习处理单元303发送用于给出包括使用停止的参数的再学习指令的再学习命令。
学习处理单元303接收在步骤S809中发送的再学习命令,并且响应于接收到的再学习命令,从输入数据存储单元302获取包括使用停止的参数的学习输入数据(图8A的步骤S810)。学习处理单元303使用在步骤S809中获取的学习输入数据来进行学习处理(图8A的步骤S811)。学习处理单元303将通过步骤S811的学习处理而生成的预测模型存储在预测模型存储单元306中,并通过自动或手动操作将该预测模型替换为实际操作期间的预测模型。
学习贡献确定单元304确定获取未被认为是低贡献参数的使用停止的参数的参数获取设备103(图8A和图8B的步骤S812)。即,学习贡献确定单元304在步骤S812中指定获取未被认为是低贡献参数的使用停止的参数的参数获取设备103。学习贡献确定单元304经由控制命令发送单元305将用于在步骤S812中指定的参数获取设备103的操作恢复命令发送到网关设备102的控制命令接收单元400(图8A和图8B的步骤S813)。控制命令接收单元400接收在步骤S813中发送的操作恢复命令。参数获取设备控制单元401进行控制,以使得响应于控制命令接收单元400接收到的操作恢复命令,恢复在步骤S812中指定的参数获取设备103的操作(图8A的步骤S814)。
其他实施例
还可以通过读出并执行记录在存储介质(也可更完整地称为“非临时性计算机可读存储介质”)上的计算机可执行指令(例如,一个或更多个程序)以执行上述实施例中的一个或更多个的功能、并且/或者包括用于执行上述实施例中的一个或更多个的功能的一个或更多个电路(例如,专用集成电路(ASIC))的系统或装置的计算机,来实现本发明的实施例,并且,可以利用通过由所述系统或装置的所述计算机例如读出并执行来自所述存储介质的所述计算机可执行指令以执行上述实施例中的一个或更多个的功能、并且/或者控制所述一个或更多个电路执行上述实施例中的一个或更多个的功能的方法,来实现本发明的实施例。所述计算机可以包括一个或更多个处理器(例如,中央处理单元(CPU),微处理单元(MPU)),并且可以包括分开的计算机或分开的处理器的网络,以读出并执行所述计算机可执行指令。所述计算机可执行指令可以例如从网络或所述存储介质被提供给计算机。所述存储介质可以包括例如硬盘、随机存取存储器(RAM)、只读存储器(ROM)、分布式计算系统的存储器、光盘(诸如压缩光盘(CD)、数字通用光盘(DVD)或蓝光光盘(BD)
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(CPU)、微处理单元(MPU)读出并执行程序的方法。
虽然参照示例性实施例对本发明进行了描述,但是应当理解,本发明并不限于所公开的示例性实施例。应当对所附权利要求的范围给予最宽的解释,以使其涵盖所有这些变型例以及等同的结构和功能。
本申请要求2019年8月2日提交的日本专利申请第2019-142936号的权益,该申请的全部内容通过引用并入本文。
- 联合收割机、收获量计算方法、计算系统、计算程序、及记录有计算程序的 记录介质;谷粒排出收获量计算方法、计算系统、计算程序、及记录有计算 程序的记录介质、不正常流入检测系统、检测程序、记录有检测程序的记录 介质、及检测方法;储存水平检测系统
- 自动行驶系统、自动行驶管理程序、记录有自动行驶管理程序的记录介质、自动行驶管理方法、区域确定系统、区域确定程序、记录有区域确定程序的记录介质、区域确定方法、联合收割机控制系统、联合收割机控制程序、记录有联合收割机控制程序的记录介质、联合收割机控制方法