控制雷达发射以实现干扰抑制
文献发布时间:2023-06-19 09:47:53
本申请是2015年11月24日提交的名称为:“控制雷达发射以实现干扰抑制”的中国专利申请201580062561.7(PCT/US2015/062466)的分案申请。
技术领域
本发明总体涉及雷达装置,并且更具体地涉及雷达返回中的干扰抑制。
背景技术
雷达具有各种各样的用途。例如,频率调制的连续波(FMCW)雷达在汽车和工业应用中是有用的。雷达的灵敏度通常是重要的特征。灵敏度是指雷达可靠地检测产生弱雷达返回的对象的能力。然而,随着雷达接收器的灵敏度增加,其变得更容易受到干扰的影响。例如,由电源的调制引起的杂散(spur)可潜在地被检测为真实对象,从而导致假报警。减轻杂散影响的常规方法通常采用外部杂散抑制方案,诸如抖动电源。
鉴于上述问题,需要具有集成干扰抑制的高灵敏度雷达。
发明内容
在所描述的示例中,通过基于来自具有第一啁啾率(chirp rate)的第一雷达发射的第一返回识别与可能对象相关联的第一距离(range)以及基于来自具有与第一啁啾率不同的第二啁啾率的第二雷达发射的第二返回识别与可能对象相关联的第二距离来实现对象的雷达检测。一起评估第一距离和第二距离以确定可能对象是否是真实对象。
附图说明
图1和图2图示性示出根据示例实施例的概念。
图3图表式地示出根据示例实施例的雷达装置。
图4图表式地更详细示出根据示例实施例的图3的装置的一部分。
图5和图6示出根据示例实施例的操作。
具体实施方式
示例实施例提供具有集成干扰抑制的雷达,其在雷达返回频谱中识别干扰源(interferer)(例如,诸如上述提到的杂散),并且防止它们被检测为真实对象。所述雷达在识别乘法杂散(诸如源自功率放大器(PA)电源上的电源纹波的那些杂散)或PA的其他干扰源中特别有用。所述雷达还适用于加法杂散和其他干扰源。根据示例实施例,第一雷达发射和第二雷达发射分别具有彼此不同的第一啁啾率和第二啁啾率。分别基于来自第一雷达发射和第二雷达发射的第一返回和第二返回来识别与可能对象相关联的第一距离和第二距离。一起评估第一距离和第二距离以确定可能对象是否是真实对象。
一些实施例发射具有略微不同啁啾率(本文中还被称为啁啾斜率)的两个连续的雷达发射帧。这允许识别杂散和其他干扰源,因为杂散或其他干扰源将在对应的返回帧中分别占用不同位置(即出现在不同的距离)。这与将出现在两个返回帧中的相同距离位置处的真实对象形成对比。为了识别并且去除可以以其他方式被假识别成真实物体的干扰源,可在帧之间对在两个返回帧中检测到的可能对象的距离位置进行比较。在一些实施例中,选择发射帧中的一个的啁啾持续时间,使得发射帧提供与其他发射帧相同的距离分辨率。
作为干扰源示例,由于在距离da处的侵略者(aggressor)对象,考虑来自载波的频率fs处的乘法杂散。与杂散相关联的雷达返回将呈现频率fa_spur=(S)(2)(da)/c+fs,其中S是啁啾斜率,c是光速。真实物体在距离db处的雷达返回将呈现频率fb=(S)(2)(db)/c。将上述频率乘以c/2S产生它们的等效距离估计,它们是:(a)fa_spur=>da+(fs)(c)/2S;(b)fb=>db。因此,乘法杂散的估计距离取决于啁啾斜率S,而真实对象的估计距离独立于啁啾斜率S。该技术也适用于加法杂散,在这种情况下,上述等式中da=0。
图1示出上述的概念。FFT与距离图被示出用于被指定为帧1和帧2的两个连续雷达返回帧,所述返回帧分别对应于已经被连续发射并且具有略微不同的啁啾斜率的两个雷达发射帧。本文所描述的雷达发射帧中的每一个都可以包括具有相同啁啾斜率的一个或更多个啁啾。在11和13处示出的峰是由干扰源导致的,并且在15和17处的峰是由真实对象导致的。峰11和13中的每一个在帧1中均出现在与帧2不同的距离位置处,而峰15和17中的每一个在帧1和帧2中均出现在相同的距离位置处。因此,通过比较帧1中检测到的峰的距离值和帧2中检测到的峰的距离值,可以将干扰源峰11和13与真实对象峰15和17区分开。任何距离值匹配对应于真实对象。
在帧1和帧2中的至少一个中,示例实施例保证真实对象峰的无干扰检测,因为在两个帧中,干扰源峰和真实对象峰不可重合(即出现在相同的距离处)。这在图2中示出,其中干扰源峰21在帧1中与真实对象峰23在距离上重合,但在帧2中相对于真实对象峰23存在距离移位。再次,在帧1和帧2中的峰的距离匹配对应于真实对象。
在发射机处,考虑示例,其中:啁啾持续时间为Tc;与返回帧1相关联的发射帧的啁啾斜率为S1;与返回帧2相关联的发射帧的啁啾斜率为S2;并且啁啾斜率S1和啁啾斜率S2通过因子α相关,使得S2=αS1。如果距离分辨率在两个帧之间保持不变,使得分别与返回帧1和返回帧2相关联的发射帧的啁啾持续时间是Tc和Tc/α,则对于给定的杂散(干扰源)频率fs,距离筐(range bin)使干扰源峰在帧2中相对于帧1移位,该距离筐的数量是:
距离筐被定义为雷达的距离分辨率,并且由c/[2(S)(Tc)]给出,其中S和Tc分别是啁啾斜率和啁啾持续时间。在帧1中与干扰源峰重合的真实对象峰将在帧2中与干扰源峰分离Δf Hz,其中:
Δf=f
例如,考虑在1.5MHz处的杂散。在一些实施例中,Tc=125us(更高分辨率啁啾的示例),以及α=0.9,产生Δrange_idx=21并且Δf=0.15MHz。在一些实施例中,Tc=30us(更低分辨率啁啾的示例),以及α=0.85,产生Δrange_idx=8并且Δf=0.225MHz。
图3图解式地示出根据示例实施例的雷达装置。在一些实施例中,装置是FMCW雷达装置。雷达信号发生器31产生具有相应的啁啾斜率S1和S2的两个雷达发射信号。选择器33根据帧定时在两个发射信号之间选择,使得在32处发射的两个连续帧具有相应的啁啾斜率S1和S2。
接收器35在34处接收与32处发射的帧相关联的返回帧。接收器35对两个连续的返回帧(同样参见图1和图2中的帧1和帧2)执行常规雷达接收处理(包括如图1和图2所指示的FFT处理),所述两个连续的返回帧分别对应于在32处已被连续发射的具有不同啁啾斜率的两个帧。由接收器35产生的接收处理结果包括在帧1和帧2中的距离位置处检测到的峰(同样参见图1和图2)。接收处理结果在36处被传送到滤波器37,滤波器37在帧1和帧2之间比较检测到的峰的距离。基于比较,滤波器37区别干扰源和真实对象并且消除干扰源。然后在38处可传送与识别的真实对象相关联的接收处理结果以进行进一步的常规处理(通常在39处示出)。
图4图解式地更详细示出根据示例实施例的图3的滤波器37。帧1和帧2的接收处理结果由接收器35提供,如通常在41和43处示出。逻辑45实施将帧1中的峰的距离值与帧2中的峰的距离值进行比较的匹配检测功能,并且仅将比较匹配识别为真实对象。然后在38处可传送与真实对象相关联的接收处理结果以在39处进行进一步处理(如图3所示)。
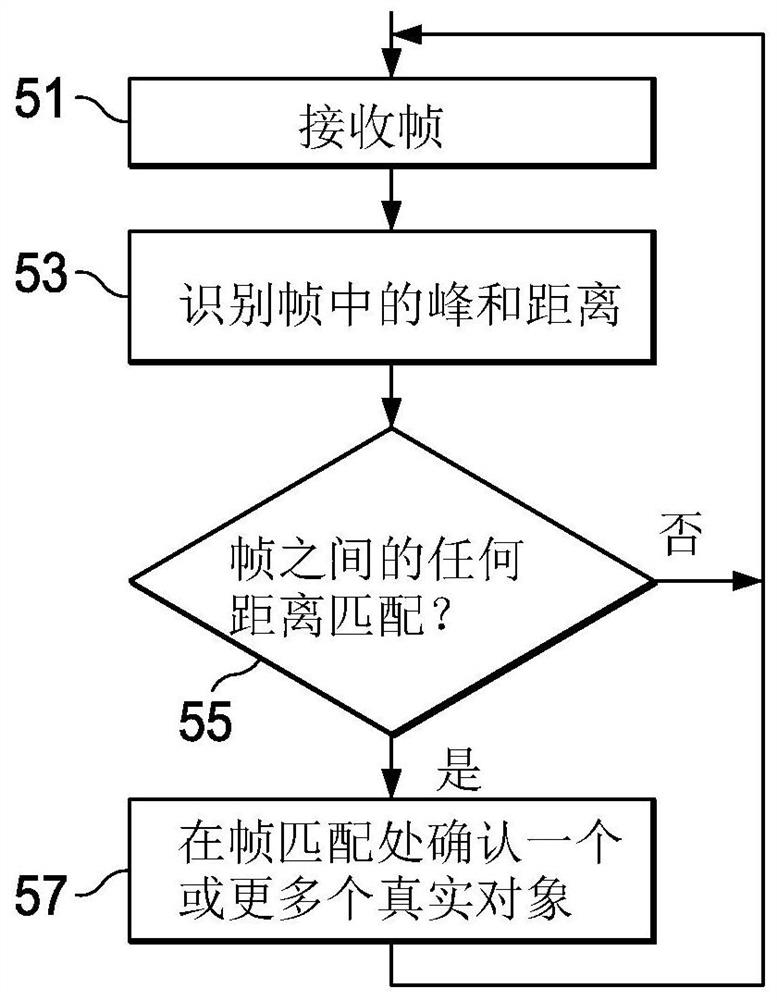
图5示出可根据示例实施例执行的操作。在一些实施例中,以上相对于图3和图4描述的装置能够执行图5所示的操作。在51处,接收连续返回帧。在53处,针对两个返回帧识别(如图1和图2所示)任何峰及其各自对应的距离。在55处,确定在两个帧之间是否存在任何距离匹配。如果不存在,则没有识别出真实对象,并且操作返回到51。如果在55处在两个帧之间存在距离匹配,则这些匹配在57处被确认为真实对象,并且操作返回到51。
图6示出可根据示例实施例执行的进一步操作。在一些实施例中,以上相对于图3描述的装置能够执行图6所示的操作。在61处,在第一帧(F1)中,雷达发射(通过XMIT指定)以第一啁啾率(CR1)在第一啁啾持续时间(CD1)内发生。之后,在62处,在第二帧(F2)中,雷达发射以第二啁啾率(CR2)在第二啁啾持续时间(CD2)内发生,其中:第二啁啾率与第一啁啾率不同;第二帧连续地紧跟在第一帧之后;以及选择第二啁啾持续时间,使得第二帧具有与第一帧相同的距离分辨率。
再次参考图2所述的情况,其中真实对象峰23和干扰源峰21在所述帧的一个中重合,其通常被要求(用于进一步处理)用于确定真实对象峰23的振幅(和/或相位)。可以如上所述地识别出峰23的距离值,并且如果在该距离值处的峰的振幅(和/或相位)在两个帧之间显著地不同(如图2所示),则可推断在所述帧的一个中存在重合的干扰源。可以执行在相同距离处的峰之间的显著振幅(和/或相位)差异(例如,超出预定阈值)的这种检测,诸如由图4的逻辑45执行。然而,在一开始,不清楚两个帧中的哪一个呈现真实对象峰23的无干扰视图。因此,确定真实对象峰23的振幅(和/或相位)将需要进一步的处理。示例实施例使用各种技术来作出该确定。
呈现真实对象峰23的“无干扰”视图的帧将包含对应于干扰源的附加峰,并且一些实施例利用该事实。这就是图2的帧2FFT图中的峰21。当然,该附加峰21在干扰源峰21和真实对象峰23重合的帧1FFT图中不能被单独检测。通过简单确定所述帧中的哪个包含附加峰(图2示例中的帧2),可以识别呈现真实对象峰23(图2示例中的帧1)的无干扰视图的帧。因此,可以通过检查帧1中的峰23来确定真实对象峰23的真实振幅(和/或相位)。可以执行上述分析,诸如由图4的逻辑45执行。
在一些实施例中,如果逻辑45确定真实对象峰与两个返回帧中的一个中的干扰源峰重合,则逻辑45向雷达信号发生器(参见图3中的31)发送信号以发射第三帧,所述第三帧具有与对应于帧1和帧2的帧发射的啁啾斜率不同的啁啾斜率。在对应于三个帧发射的三个返回帧中的至少两个的频谱中,确保真实对象峰的无干扰观察。因此,在三个返回帧中的至少两个中,真实对象峰的振幅(和/或相位)将近似相等(例如,在考虑由于噪音引起的变化的特定阈值内)。这将对应于真实对象峰的真实振幅(和/或相位)。可以在真实对象的所识别的距离处的三个峰的振幅(和/或相位)之间执行合适的三向(three-way)比较,诸如由图4的逻辑45执行。
示例实施例实现各种优点,其中一些示例是:不需要外部杂散抑制技术;即使杂散是动态变化的,它们也是有效的;性能独立于帧中的啁啾数量(例如,即使在每帧仅具有一个啁啾的工业场景中也是有效的);在与常规雷达接收器装置相关联的帧内2D FFT处理中,它们不需要改变;在连续帧(例如,大约0.9的参数α)中的啁啾斜率之间仅需要适度的百分比差异;对于乘法和加法杂散以及对于其他干扰源,它们均是有效的;以及即使对于非零速度对象,它们也是有效的。
在所附权利要求的范围内,在所述实施例中,修改是可能的,并且其他实施例是可能的。
- 控制雷达发射以实现干扰抑制
- 基于资源分配与功率控制的UAV网络雷达干扰抑制方法