一种新型球形机器人及其驱动方法
文献发布时间:2023-06-19 09:47:53
技术领域
本发明属于球形机器人技术领域,具体涉及一种新型球形机器人及驱动方法。
背景技术
随着机器人技术领域的不断完善,分化出了球形机器人等机器人技术分支,传统的球形机器人是指一类驱动系统位于球壳内部,通过内驱动方式实现球体运动的机器人,然而内驱动的球形机器人难以实现在复杂环境中的操作。
发明内容
本发明为了寻找球形机器人的一种新的驱动方法,提出一种新型球形机器人及驱动方法。
本发明一种新型球形机器人,包括球壳、弹跳系统和机械臂模块。球壳上开设有多个安装槽和多个机械臂安装孔。每个安装槽内均安装有弹跳系统;每个机械臂安装孔内均安装有机械臂模块。各机械臂模块均能够伸出球壳,从而改变整个球形机器人的重心位置。个弹跳系统内的弹跳板均能够弹出,推动球形机器人弹跳。
作为优选,所述的安装槽共有六个,均匀分布在球壳外表面;机械臂安装孔共有八个,均匀分布在球壳外表面。任意一个机械臂安装孔均位于两两相邻且呈正三角形排布的三个安装槽的中心位置。
作为优选,所述的机械臂模块包括机械臂底座、第一齿形铰块链、第二齿形铰块链、末端块、驱动电机和驱动齿轮。所述的机械臂底座包括安装盘(3-1-1)和限位挡板(3-1-7)。安装盘(3-1-1)与球壳的内壁固定;限位挡板(3-1-7)与安装盘(3-1-1)固定。限位挡板(3-1-7)的中心位置开设有铰链转换口(3-1-9);铰链转换口(3-1-9)呈方形,宽度等于第一齿形铰块链和第二齿形铰块链的厚度之和。所述安装盘(3-1-1)的内侧面的两侧边缘均设置有铰接座(3-1-11);第一齿形铰块链、第二齿形铰块链的内端与安装盘(3-1-1)上的两个铰接座(3-1-11)分别铰接,末端块内端端面的两侧边缘分别铰接。第一齿形铰块链和第二齿形铰块链均穿过限位挡板(3-1-7)上的铰链转换口(3-1-9);第一齿形铰块链与第二齿形铰块链的同一侧边缘上均开设有多个传动齿,且第一齿形铰块链与第二齿形铰块链拼接在一起之后,形成刚性的齿条。驱动齿轮支承在箱体靠近第一齿形铰块链、第二齿形铰块链的一侧。驱动齿轮与第一齿形铰块链、第二齿形铰块链拼接后形成的齿条啮合。驱动齿轮由驱动电机驱动。
作为优选,所述的机械臂底座还包括弹性复位组件。弹性复位组件包括四根滑杆(3-1-4)、四根阻尼弹簧(3-1-3)和两个滑架。所述安装盘的外侧面边缘处固定有正方形排布的四根滑杆(3-1-4);各滑杆(3-1-4)的外端均固定有截止块(3-1-5)。滑架包括连接转轴(3-1-10)和两个滑块(3-1-6)。连接转轴(3-1-10)的两端与两个滑块(3-1-6)分别转动连接。两个滑架内的共计四个滑块(3-1-6)与四根滑杆(3-1-4)分别构成滑动副。四根滑杆(3-1-4)上均套置有阻尼弹簧(3-1-3);阻尼弹簧(3-1-3)的两端分别抵住安装盘(3-1-1)、对应的滑块(3-1-6)。两根连接转轴(3-1-10)相互平行,且分别位于安装盘(3-1-1)的两侧。两根连接转轴(3-1-10)位于两个铰接座(3-1-11)之间。第一齿形铰块链、第二齿形铰块链分别绕过两根连接转轴(3-1-10)。
作为优选,所述的第一齿形铰块链包括依次铰接的半铰接块和多个第一铰接块。半铰接块位于第一齿形铰块链的外端,长度为第一铰接块长度的一半。半铰接块的内侧面设置有一个矩形凹槽;第一铰接块的内侧面设置有沿自身长度方向排列的两个矩形凹槽。矩形凹槽的涂有磁性材料。第二齿形铰块链包括依次铰接的多个第二铰接块。第二铰接块的内侧面设置有沿自身长度方向排列的两个矩形凸起;矩形凸起的外侧面涂有磁性材料;当第一齿形铰块链与第二齿形铰块链拼接在一起时,每个矩形凸起均卡入对应的矩形凹槽。第一铰接块与第二铰接块的长度相等。
作为优选,铰链转换口(3-1-9)的侧面顶部设置有圆弧倒角。
作为优选,所述弹跳系统包括弹跳板、弹跳驱动弹簧和弹跳驱动组件。多根弹跳驱动弹簧的内端均与球壳上对应的安装槽固定,外端均与弹跳板的内侧面固定。弹跳板在弹跳驱动弹簧的弹力驱动下弹出,在弹跳驱动组件的驱动下缩回。
作为优选,各安装槽的中心位置均开设有连通到球壳内腔的穿绳孔。所述的弹跳驱动组件安装在球壳的内腔,包括细绳、辊轴、回拉电机和电机底座。辊轴支承在电机底座上;辊轴由回拉电机驱动旋转。细绳的一端绕置固定在辊轴上,另一端穿过球壳上对应的穿绳孔后与弹跳板固定。
作为优选,所述的弹跳驱动组件还包括旋止电机和夹具。夹具和旋止电机均安装在电机底座上;夹具上的两根能够变形的夹臂间隔设置形成夹口。辊轴穿过夹具的夹口;夹具的夹口外端设置有锁止螺杆。锁止螺杆与两根夹臂形成旋向相反的螺旋副;锁止螺杆由旋止电机驱动旋转。
该新型球形机器人的驱动方法包括滚动驱动方法和弹跳驱动方法。
滚动驱动方法具体如下:
步骤一、将靠近目标方向且位于球壳几何中心上方的一个或多个机械臂模块伸出,带动球壳向目标方向滚动。
步骤二、当伸出的机械臂模块运动到球壳几何中心的下方时,将伸出的机械臂模块缩回,并将新的靠近目标方向且位于球壳几何中心上方的一个或多个机械臂模块伸出,使得球壳继续向目标方向滚动,依此循环往复。
弹跳驱动方法具体如下:
步骤一、位于球壳重心下方的各个机械臂模块等长度伸出,使得球壳与地面分开。
步骤二、靠近目标方向的一个或多个机械臂模块全部或部分缩回,使得球壳向目标方向倾斜。
步骤三、朝下的弹跳系统内的弹跳板推出,带动球形机器人向目标方向弹跳。
步骤四、球形机器人弹出后,推出的弹跳板缩回。
本发明具有的有益效果是:
1.本发明利用机械臂伸缩的方式改变球形机器人的重心,提供了球形机器人滚动的新型驱动方法,更加适合在复杂环境下的运动勘探。
2.本发明中的机械臂通过组合铰接块实现柔性臂与刚性臂的转化,增大了机械臂的极限长度。
3.本发明能够进行弹跳,进一步增强了地形适应能力,且弹跳方向可通过调节四根支撑的机械臂的长度任意改变,弹射精度高。
附图说明
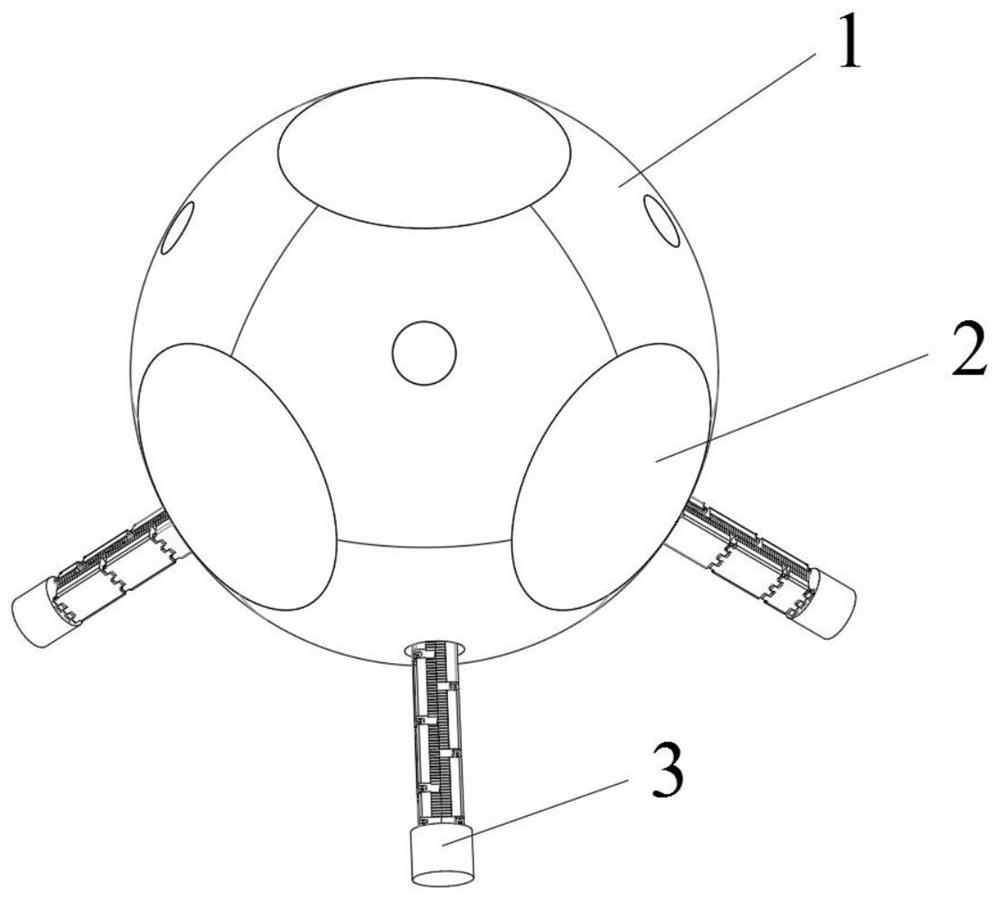
图1是本发明的整体结构的轴侧示意图;
图2是本发明的整体结构的俯视示意图;
图3是本发明中的球壳的示意图;
图4是本发明中的机械臂模块的结构示意图;
图5是本发明中的机械臂底座的示意图;
图6是本发明中的机械臂模块的驱动示意图;
图7是本发明中的弹跳系统的结构示意图;
图8是本发明中的电机底座的示意图;
图9是本发明建立相对空间直角坐标系的示意图。
具体实施方式
以下结合附图对本发明作进一步说明。
如图1、2和3所示,一种新型球形机器人,包括球壳1、弹跳系统2和机械臂模块3。球壳1上开设有均匀分布在球壳1外表面的六个安装槽1-1(分别朝向前、后、左、右、上、下)。任意两个相邻的安装槽的朝向均呈90°夹角。六个安装槽1-1的中心位置均开设有连通到球壳1内腔的穿绳孔1-2,用于通过细绳。球壳1外表面的八个不同朝向朝向的位置均开设有连通到球壳1内腔的机械臂安装孔1-3。任意一个机械臂安装孔1-3均位于两两相邻且呈正三角形排布的三个安装槽1-1的中心位置。六个弹跳系统2分别安装在球壳1上的六个安装槽1-1处;八个机械臂模块3分别安装在球壳1上的八个机械臂安装孔1-3内。
如图4、5和6所示,机械臂模块3包括机械臂底座3-1、第一齿形铰块链、第二齿形铰块链、末端块3-4、驱动电机3-6、传动齿轮3-7和驱动齿轮3-8。机械臂底座3-1包括安装盘3-1-1、箱体3-1-2、阻尼弹簧3-1-3、限位挡板3-1-7和弹性复位组件。安装盘3-1-1与球壳1的内壁固定;限位挡板3-1-7与安装盘3-1-1的内侧面间隔设置,通过多根连接柱固定。安装盘3-1-1的中心位置开设有让位通孔3-1-8;限位挡板3-1-7的中心位置开设有铰链转换口3-1-9;铰链转换口3-1-9呈方形,宽度等于第一齿形铰块链和第二齿形铰块链的厚度之和。铰链转换口3-1-9的侧面顶部设置有圆弧倒角。弹性复位组件包括四根滑杆3-1-4和两个滑架。安装盘的外侧面边缘处固定有正方形排布的四根滑杆3-1-4;各滑杆3-1-4的外端均固定有截止块3-1-5。滑架包括连接转轴3-1-10和两个滑块3-1-6。连接转轴3-1-10的两端与两个滑块3-1-6分别转动连接。两个滑架内的共计四个滑块3-1-6与四根滑杆3-1-4分别构成滑动副。四根滑杆3-1-4上均套置有阻尼弹簧3-1-3;阻尼弹簧3-1-3的两端分别抵住安装盘3-1-1、对应的滑块3-1-6。两根连接转轴3-1-10相互平行,且分别位于安装盘3-1-1的两侧,分别用于为第一齿形铰块链、第二齿形铰块链的复位提供辅助弹力;连接转轴3-1-10在上下滑动的同时能够旋转,减小对第一齿形铰块链和第二齿形铰块链的阻力。
安装盘3-1-1的内侧面的两侧边缘均设置有铰接座3-1-11;两根连接转轴3-1-10位于两个铰接座3-1-11之间。两个铰接座3-1-11关于两根连接转轴3-1-10的对称面对称。第一齿形铰块链、第二齿形铰块链的内端与安装盘3-1-1上的两个铰接座3-1-11分别铰接,末端块3-4内端端面的两侧边缘分别铰接。第一齿形铰块链和第二齿形铰块链均穿过限位挡板3-1-7上的铰链转换口3-1-9和安装盘3-1-1上的让位通孔3-1-8;第一齿形铰块链、第二齿形铰块链分别绕过两根连接转轴3-1-10,使得两根连接转轴3-1-10分别抵住第一齿形铰块链、第二齿形铰块链,产生复位力。第一齿形铰块链和第二齿形铰块链穿过铰链转换口3-1-9后拼接在一起,形成刚性杆式结构,从而通过控制第一齿形铰块链和第二齿形铰块链穿过铰链转换口3-1-9的程度来控制末端块3-4的伸出量。初始状态下,末端块3-4位于机械臂安装孔1-3内。第一齿形铰块链与第二齿形铰块链的同一侧边缘上均开设有多个传动齿,且第一齿形铰块链与第二齿形铰块链拼接在一起之后,传动齿对齐,能够与同一个齿轮啮合。齿轮轴支承在箱体靠近第一齿形铰块链、第二齿形铰块链的一侧。驱动齿轮3-8与齿轮轴固定,且与第一齿形铰块链、第二齿形铰块链拼接后形成的齿条啮合。
箱体3-1-2固定在限位挡板3-1-7与安装盘3-1-1之间,且位于铰链转换口3-1-9的一侧。驱动电机3-6安装在箱体3-1-2内;两个传动齿轮3-7与驱动电机3-6的输出轴、齿轮轴3-9分别固定;两个传动齿轮3-7啮合,使得驱动电机3-6能够带动驱动齿轮3-8旋转,从而带动第一齿形铰块链和第二齿形铰块链的运动。
第一齿形铰块链包括依次铰接的半铰接块3-5和多个第一铰接块3-2。半铰接块3-5位于第一齿形铰块链的外端,长度为第一铰接块3-2长度的一半。半铰接块3-5的内侧面设置有一个矩形凹槽;第一铰接块3-2的内侧面设置有沿自身长度方向排列的两个矩形凹槽。矩形凹槽的涂有磁性材料。第二齿形铰块链包括依次铰接的多个第二铰接块3-3。第二铰接块3-3的内侧面设置有沿自身长度方向排列的两个矩形凸起;矩形凸起的外侧面涂有磁性材料;当第一齿形铰块链与第二齿形铰块链拼接在一起时,每个矩形凸起均卡入对应的矩形凹槽。第一铰接块3-2与第二铰接块3-3的长度相等。由于半铰接块3-5的存在,使得第一铰接块3-2与第二铰接块3-3交错配合,避免了第一齿形铰块链与第二齿形铰块链上的铰接轴对齐,从而增强了第一齿形铰块链与第二齿形铰块链拼接后形成的齿条的刚度。
如图7和8所示,所述弹跳系统2包括弹跳板2-1、弹跳驱动弹簧2-2和弹跳驱动组件。多根弹跳驱动弹簧2-2的内端均与球壳1上对应的安装槽1-1固定,外端均与弹跳板2-1的内侧面固定。弹跳板2-1的外侧面形状与球壳1的外侧面形状对应,使得弹跳板2-1在缩回状态下,能够配合球壳1形成完整球体。弹跳驱动组件安装在球壳1的内腔,包括细绳、辊轴2-3、回拉电机2-5、旋止电机2-4、夹具2-7和电机底座2-6。电机底座2-6与球壳1的内壁固定。辊轴2-3支承在电机底座2-6上;夹具2-7、回拉电机2-5和旋止电机2-4均安装在电机底座2-6上;夹具2-7上的两根能够变形的夹臂间隔设置形成夹口。辊轴2-3穿过夹具2-7的夹口,与回拉电机2-5的输出轴固定。夹具2-7的夹口外端设置有一根锁止螺杆。锁止螺杆与两根夹臂形成旋向相反的螺旋副;通过转动锁止螺杆即可实现夹具2-7的松紧;旋止电机2-4的输出轴与锁止螺杆的一端固定,从而实现电动控制辊轴2-3在锁止状态和可运动状态之间的切换。细绳的一端绕置固定在辊轴2-3上,另一端穿过球壳上对应的穿绳孔1-2后与弹跳板2-1固定。
作为一种优选的技术方案,弹跳板2-1呈圆弧形,且其外侧曲率与球壳1外侧曲率相等,大小比球壳1上安装槽1-1略小,弹跳板2-1内侧安装有三根弹跳驱动弹簧2-2,弹跳驱动弹簧2-2围绕细绳均匀分布,弹跳板2-1与安装槽1-1轮廓同心。
本发明中机械臂的伸缩方法和原理如下:
当驱动电机带动驱动齿轮3-8正向转动时,进而使第一齿形铰块链与第二齿形铰块链向外运动,滑块也因连接转轴3-1-10受压而滑动,使得阻尼弹簧被压缩,机械臂伸长。
当驱动电机带动驱动齿轮3-8反向转动时,进而使第一齿形铰块链与第二齿形铰块链向内运动,在阻尼弹簧提供的弹力和安装盘上铰链转换口提供的拉力作用下,已经组合的第一铰接块和第二铰接块会因此分开,机械臂缩短。
该新型球形机器人的滚动原理如下:
根据球体固有的稳定特性,球体的重心会时刻趋向于最低位置,球体也因此滚动,通过将靠近前进方向的机械臂伸出的方式来不断改变球体的重心位置,使球体的重心一直偏向于滚动方向,则就可使球体进行可控的滚动。
如图9所示,在驱动前,建立相对空间直角坐标系。相对空间直角坐标系的坐标原点保持在球壳1的圆心,X轴、Y轴保持水平设置,Z轴保持竖直设置;初始状态下,相对空间直角坐标系X轴、Y轴、Z轴分别穿过相邻的三个安装槽1-1的中心轴线;根据八个机械臂模块3在相对空间直角坐标系中的位置,将八个机械臂模块3分为第一卦限机械臂、第二卦限机械臂、第三卦限机械臂、第四卦限机械臂、第五卦限机械臂、第六卦限机械臂、第七卦限机械臂和第八卦限机械臂。在滚动中,八个机械臂模块3的卦限名称,随着其所在卦限的变化而变化。
该新型球形机器人的驱动方法具体如下:
步骤一、确定机器人运动的方向,根据运动目的地确定是否需要弹跳,规划路线。
步骤二、根据滚动方法沿着规划路线滚动,若需要弹跳,则滚动到弹跳位置后,底部位置处的旋止电机反转释放弹跳板,并根据弹跳方法进行弹跳。
滚动驱动方法具体如下:
步骤一、位于球壳1重心下方的四个机械臂模块3等长度伸出,使得四个机械臂模块3的末端块3-4与地面接触,球壳1与地面分开。此时,第五卦限机械臂、第六卦限机械臂、第七卦限机械臂和第八卦限机械臂处于伸出状态,第一卦限机械臂、第二卦限机械臂、第三卦限机械臂、第四卦限机械臂处于缩回状态。
步骤二、当球形机器人需要向X轴正方向滚动时,按照如下过程运行:首先,第一卦限机械臂和第四卦限机械臂伸出,使得球形机器人的重心向X轴正方向偏移;然后,第五卦限机械臂、第六卦限机械臂、第七卦限机械臂和第八卦限机械臂缩回,使得球壳1失去稳定支撑,球壳1向X轴正方向滚动。当原第一卦限机械臂、第四卦限机械臂随着滚动分别进入第五、八卦限,分别成为新的第五卦限机械臂、第八卦限机械臂后,新的第一卦限机械臂、第四卦限机械臂伸出,新的第五卦限机械臂、第八卦限机械臂缩回,依此循环往复,即可实现持续滚动。
同理,当球形机器人需要向X轴负方向滚动时,首先,第二、三卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1向X轴负方向滚动。当原第二、三卦限机械臂随着滚动分别进入第六、七卦限,分别成为新的第六、七卦限机械臂后,新的第二、三卦限机械臂伸出,新的第六、七卦限机械臂缩回,依此循环往复。
同理,当球形机器人需要向Y轴正方向滚动时,首先,第一、二卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1向X轴负方向滚动。当原第一、二卦限机械臂随着滚动分别进入第五、六卦限,分别成为新的第五、六卦限机械臂后,新的第一、二卦限机械臂伸出,新的第五、六卦限机械臂缩回,依此循环往复。
同理,当球形机器人需要向Y轴负方向滚动时,首先,第三、四卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1向X轴负方向滚动。当原第三、四卦限机械臂随着滚动分别进入第七、八卦限,分别成为新的第七、八卦限机械臂后,新的第三、四卦限机械臂伸出,新的第七、八卦限机械臂缩回,依此循环往复。
同理,当球形机器人需要向X、Y轴正方向的中间方向滚动时,首先,第一卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1滚动。当原第一卦限机械臂随着滚动进入第五卦限,分别成为新的第五卦限机械臂后,新的第一卦限机械臂伸出,新的第五卦限机械臂缩回,依此循环往复。
同理,当球形机器人需要向X轴负方向、Y轴正方向的中间方向滚动时,首先,第二卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1滚动。当原第二卦限机械臂随着滚动进入第六卦限,分别成为新的第六卦限机械臂后,新的第二卦限机械臂伸出,新的第六卦限机械臂缩回,依此循环往复。
同理,当球形机器人需要向X、Y轴负方向的中间方向滚动时,首先,第三卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1滚动。当原第三卦限机械臂随着滚动进入第七卦限,分别成为新的第七卦限机械臂后,新的第三卦限机械臂伸出,新的第七卦限机械臂缩回,依此循环往复。
同理,当球形机器人需要向X轴正方向、Y轴负方向的中间方向滚动时,首先,第四卦限机械臂伸出;然后,第五、六、七卦、八卦限机械臂缩回,球壳1滚动。当原第四卦限机械臂随着滚动进入第八卦限,分别成为新的第八卦限机械臂后,新的第四卦限机械臂伸出,新的第八卦限机械臂缩回,依此循环往复。
弹跳驱动方法具体如下:
步骤一、位于球壳1重心下方的四个机械臂模块3等长度伸出,使得四个机械臂模块3的末端块3-4与地面接触,球壳1与地面分开。
步骤二、靠近目标方向的两个机械臂模块3全部或部分缩回,使得球壳1目标方向倾斜。两个机械臂模块3的缩回程度决定弹跳的方向和角度。
步骤三、在朝下的弹跳系统2内的回拉电机2-5无自锁的,旋止电机2-4反转,使得夹具2-7松开辊轴2-3,弹跳板2-1被弹出在弹跳驱动弹簧2-2的弹力推动下向外推出,带动球形机器人向目标方向弹跳。
步骤四、球形机器人弹出后,回拉电机2-5正转,用细绳拉动弹跳板2-1复位。之后,旋止电机2-4正转,使得夹具2-7重新锁止辊轴2-3。
- 一种新型球形机器人及其驱动方法
- 一种提升双轮驱动球形机器人爬坡能力的方法