一种测量转轴六自由度几何误差的光学测量装置
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及空间几何精度检测技术领域,尤其涉及一种测量转轴六自由度几何误差的光学测量装置及方法。
背景技术
SH Suh,ES Lee,SY Jung等人在论文《Error modelling and measurement forthe rotary table of five-axis machine tools》中公开了一种基于多面棱体的转轴五自由度几何误差的测量方法。该方法采用分步测量,分别安装多面棱体和高精度主球作为角度和直线度的敏感单元。以多面棱体作为靶镜,以两个相互垂直的自准直仪作为光源安装在多面棱体的两侧,可以测量转轴绕X、Y、Z轴的角度误差。然后将碳化钨制成的高精度主球作为直线度敏感单元安装在转轴的上表面中心,将接触式位移传感器顶在高精度主球的垂直方向,转轴旋转一周即可测出转轴沿着X,Y方向的直线度误差。然而,这种方法需要分步安装多面棱体和高精度主球作为敏感单元、自准直仪和接触式位移传感器作为角度和直线度的测量单元,测量系统安装调试困难,降低了测量效率并且会受待测转轴自身重复性误差的影响。
CN 106595480公开了一种用于测量转轴六自由度几何误差的激光测量系统及方法,可实现转轴六自由度几何误差同时测量,但是该系统在误差敏感单元设计、误差传感原理等多方面均有显著不同,且存在安装调试困难以及易受环境影响等问题。
目前,还不存在结构简单、操作方便、一次安装可直接测量得到转轴的六自由度几何误差的高精度测量装置。
因此,需要提供一种用于测量转轴六自由度几何误差的光学测量装置。
发明内容
本发明的目的是提供一种用于测量转轴六自由度几何误差的光学测量装置,以实现对数控机床、加工中心等精密加工与测量设备中转轴六自由度几何误差的简便快速测量。
为实现上述目的,本发明的技术方案是:
本发明中的XYZ轴方向,与国际标准ISO 10791-2:2001(E)中05、08、11立式加工中心XYZ轴方向一致,但并不局限于测量这三种类型的加工中心。
一种测量转轴六自由度几何误差的光学测量装置,包括六自由度误差敏感单元和六自由度误差测量单元,所述六自由度误差测量单元向所述六自由度误差敏感单元出射光,并根据出射光和六自由度误差测量单元接收的从所述六自由度误差敏感单元的反射光生成测量信号;
所述六自由度误差敏感单元包括与转轴同轴设置的正多面棱体,正多面棱体的底面固定于转轴外端,多面棱体的顶面中心区域设有反射镜;
所述六自由度误差测量单元包括角度误差测量单元和直线度误差测量单元;
所述角度误差测量单元包括第一自准直仪和第二自准直仪,第一自准直仪沿空间坐标系的X轴向正多面棱体的一个侧面a出射光,第一自准直仪的出射光和所述侧面a的反射光生成的测量信号用于测量转轴的绕Y轴旋转的角度误差和绕Z轴旋转的角度定位误差,第二自准直仪沿空间坐标系的Y轴向正多面棱体的另一个侧面b出射光,第二自准直仪的出射光和侧面b的反射光生成的测量信号用于测量转轴的绕X轴旋转的角度误差;
所述直线度误差测量单元包括第一激光位移传感器、第二激光位移传感器和第三激光位移传感器,第一激光位移传感器沿空间坐标系的X轴向正多面棱体侧面a相对的侧面c出射光,第一激光位移传感器和侧面c的反射光生成的测量信号用于测量转轴沿X方向的直线度误差,第二激光位移传感器沿空间坐标系的Y轴向正多面棱体侧面b相对的侧面d出射光,第二激光位移传感器的出射光和侧面d的反射光生成的测量信号用于测量转轴沿Y方向的直线度误差,第三激光位移传感器沿空间坐标系的Z轴向反射镜出射光;第三激光位移传感器的出射光和反射镜的反射光生成的测量信号用于测量转轴沿Z方向的直线度误差。
优选地,所述第一自准直仪、第二自准直仪、第一激光位移传感器、第二激光位移传感器的出射光线均位于同一平面且通过正多面棱体的轴线。
优选地,所述第一自准直仪安装在第一二维调节装置上,通过第一二维调节装置调节第一自准直仪的出射光线平行于坐标系的X轴并且光线的延长线通过转轴轴线。
优选地,所述第二自准直仪安装在第二二维调节装置上,通过第二二维调节装置调节第二自准直仪的出射光线平行于坐标系的Y轴并且光线的延长线通过转轴轴线。
优选地,所述第一激光位移传感器安装在第一三维调节装置上,通过第一三维调节装置调节第一激光位移传感器的出射光平行于X轴并且光线的延长线通过转轴轴线,以及第一激光位移传感器到正多面棱体的距离。
优选地,所述第二激光位移传感器安装在第二三维调节装置上,通过第二三维调节装置调节第二激光位移传感器的出射光平行于Y轴并且光线的延长线通过转轴轴线,以及第二激光位移传感器到正多面棱体的距离。
优选地,所述第三激光位移传感器安装在第三三维调节装置上,通过第三三维调节装置调节第三激光位移传感器的出射光平行于Z轴并且光线的延长线与转轴的轴线重合。
本发明的有益效果是:
本发明只需一次安装便能够对数控机床、加工中心转轴的六自由度误差进行检测,极大的提高了检测效率。
本发明中的自准直仪和激光位移传感器都属于标准仪器,能保证转轴测量的精度。
本发明安装、调试简单快捷,不易受外界环境影响,适用性强。
附图说明
图1示出实施例一提供的用于测量数控机床的C转轴的转轴六自由度几何误差的光学测量装置的结构立体图;
图2示出实施例一提供的用于测量数控机床的C转轴的转轴六自由度几何误差的光学测量装置的结构上视图;
图3示出实施例一提供的用于测量数控机床的C转轴的转轴六自由度几何误差的激光测量系统的结构侧视图;
图4示出实施例一中用于测量数控机床的C转轴的转轴六自由度几何误差的光学测量装置的光路上视图;
图5示出实施例一中用于测量数控机床的C转轴的转轴六自由度几何误差的光学测量装置的光路侧视图;
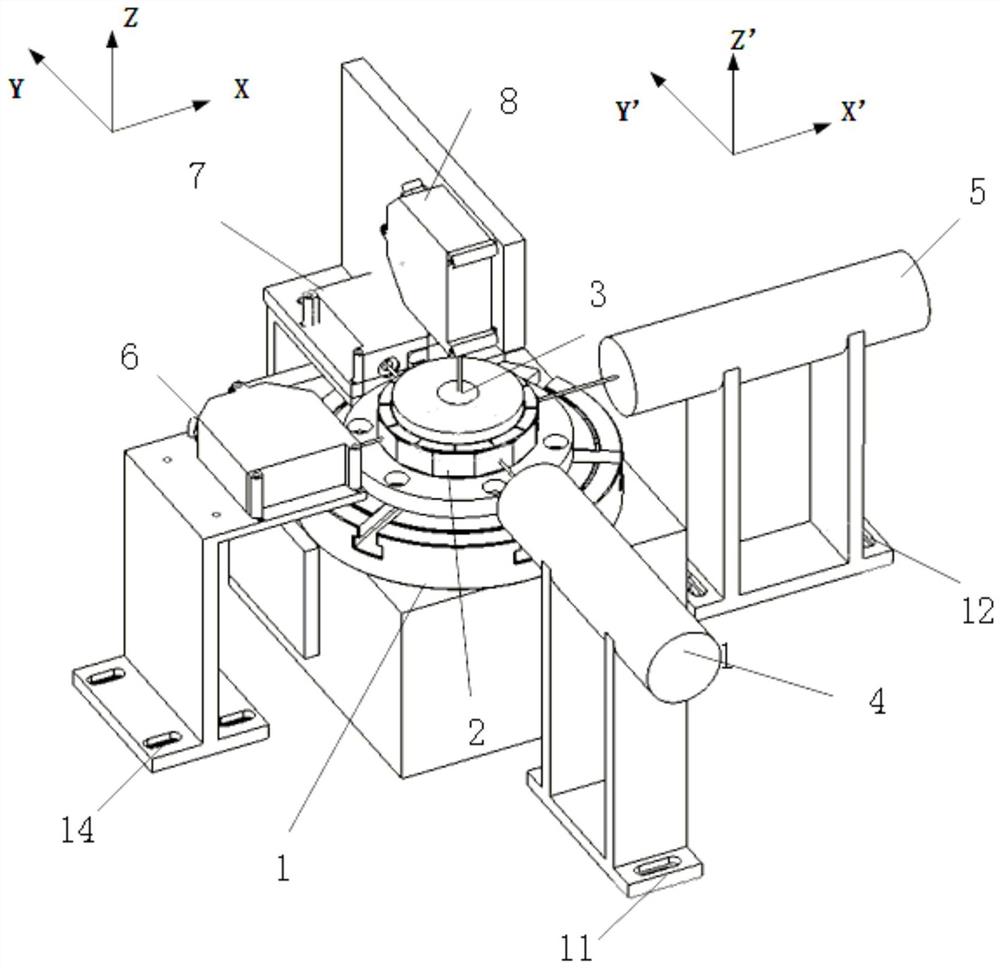
图6示出实施例二提供的用于测量数控机床A转轴的转轴六自由度几何误差的光学测量装置的结构立体图;
图7示出实施例二提供的用于测量数控机床的A转轴六自由度几何误差的光学测量装置的结构前视图;
图8示出实施例二提供的用于测量数控机床的A转轴六自由度几何误差的光学测量装置的结构侧视图。
具体实施方式
为了更清楚地说明本发明,下面结合优选实施例和附图对本发明做进一步的说明。附图中相似的部件以相同的附图标记进行表示。本领域技术人员应当理解,下面所具体描述的内容是说明性的而非限制性的,不应以此限制本发明的保护范围。
实施例一
如图1-3所示,本实施例提供的用于测量转轴六自由度几何误差的光学测量装置,用于测量数控机床的C转轴,为了更明确的对所述光学测量装置的功能进行说明,本实施中先建立一个与机床所在的世界坐标系XYZ相对应的转轴坐标系X’Y’Z’;Z’轴与C轴的旋转中心轴重合并与Z轴方向平行,X’轴与X轴方向平行,Y’轴与Y轴方向平行,坐标原点0’与所述待测转轴上表面中心处重合;此时需要测量的待测转轴六自由度误差分别为:沿X、Y、Z三个方向平移的三个直线度误差δ
该光学测量装置包括:待测转轴1、正多面棱体2、用于测量轴向跳动误差的反射镜3、用于测量转轴绕X轴的角度误差的第二自准直仪4、用于测量转轴绕Y、Z轴的角度误差的第一自准直仪5、用于测量转轴沿着X方向的直线度误差的第一激光位移传感器6、用于测量转轴沿着Y方向的直线度误差的第二激光位移传感器7和用于测量转轴沿着Z方向的直线度误差的第三激光位移传感器8,六自由度误差敏感单元正多面棱体通过转接件与待测转轴紧固在一起同时转动,反射镜与正多面棱体上表面粘接在一起同时转动,自准直仪4、5和激光位移传感器6、7、8向正多面棱体和反射镜出射光束,并根据出射光和正多面棱体2和反射镜3的反射光生成测量信号。
第二自准直仪4固定架两边的直槽口11可以对第二自准直仪4的位置进行二维调节,调节沿着X方向的直线度和微调绕着Z轴的角度。
第一自准直仪5固定架两边的直槽口12可以对第一自准直仪5的位置进行二维调节,调节沿着Y方向的直线度和微调绕着Z轴的角度。
第一激光位移传感器6固定架的直槽口13和14可以对第一激光位移传感器6进行三维调节,调节沿着X、Y方向的直线度和微调绕着Z轴的角度。
第二激光位移传感器7固定架的直槽口15和17可以对第二激光位移传感器7进行三维调节,调节沿着X、Y方向的直线度和微调绕着Z轴的角度。
第三激光位移传感器8固定架的直槽口16和17可以对第三激光位移传感器8进行X、Y方向的直线度调节,直槽口18可以对激光位移传感器8沿着Z方向的直线度调节和微调绕着X方向的角度。
光学测量装置的光路图如图4和图5所示,依次包括正多面棱体2、反射镜3、自准直仪4、5、激光位移传感器6、7、8。由自准直仪4出射的准直光经正多面棱体的反射被自准直仪4接收,自准直仪5出射的准直光经正多面棱体的反射被自准直仪5接收,根据自准直仪的出射光和和经正多面棱体反射后的反射光生成绕X、Y、Z轴的角度误差测量信号。由激光位移传感器6出射的激光经过正多面棱体反射被激光位移传感器6接收,激光位移传感器7出射的激光经过正多面棱体反射被激光位移传感器7接收,根据激光位移传感器的出射光和经正多面棱体反射后的反射光生成沿X、Y轴的直线度误差测量信号。由激光位移传感器8出射的激光经过反射镜3反射后由激光位移传感器8接收,根据激光位移传感器8的出射光和经平面反射镜的反射光可以得到沿Z轴的直线度误差测量信号。
实施例二
如图6、图7、图8所示,根据本发明的一种转轴六自由度几何误差光学测量装置,用于测量数控机床A转轴,其主要组成部分与实施例一完全一致。
测量A轴时,机床所在世界坐标系XYZ与转轴坐标系X’Y’Z’的关系:Z’轴与A轴的旋转中心轴重合并与X轴方向平行且反向,X’轴与Y轴方向平行且反向,Y’轴与Z轴方向平行且反向,坐标原点0’与A转轴的表面中心处重合;此时需要测量的六自由度误差分布维:沿X、Y、Z三个方向平移的三个直线度误差δ
本实施例提供的用于A轴的一次安装测量得到转轴六自由度几何误差的方法与实施例一基本相同。
所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
- 一种测量转轴六自由度几何误差的光学测量装置
- 一种直线导轨六自由度几何误差测量装置及方法