一种水下声学定位导航授时系统
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及水下声学定位、导航、授时领域,尤其涉及一种以北斗为时空基准的水下声学定位、导航、授时系统。
背景技术
声波是人类已知的唯一能在水下进行远距离传输的能量形式,水下声学导航定位系统是利用水声技术对水下载体进行大地坐标的测定。传统的水下声学导航定位系统按照基线长度可分为长基线(Long Baseline,LBL)、短基线(Short Baseline,SBL)、超短基线(Ultra-short Baseline,USBL)。三种基线系统的复杂度、体积尺寸、定位精度等各不相同,长基线导航定位系统通过预先布设的海底信标基阵和导航终端组成,基线长度可达千米,通过距离交汇解算目标位置,长基线需要事先测阵,定位精度高,主要应用于区域高精度定位;短基线导航定位系统由装载在载体上的多个接收换能器和声信标组成,基线长度一般为几米到几十米之间,通过距离交汇获得目标位置,受基线长度限制,短基线的精度介于LBL和USBL之间,但精度易受到载体形变等因素影响;超短基线由多源声基阵与声信标组成,基线长度为分米级或小于等于半波长,体积小,通过测量距离和方位定位,定位精度非常受限于航向、姿态传感器以及声学基阵校准和基阵安装误差等。
声学导航定位系统具有持续性、高精度等特点,经常与惯性导航系统结合,声学导航定位系统可修正惯性导航系统的累积误差,惯性导航系统可为声学导航定位系统提供短时的运动信息。此外,声学导航定位系统可利用声学通信将水上时空基准信息传递到水下时空基准网络中,通过海底基阵对水下用户进行高精度授时。
虽然水下声学导航、定位系统的应用较成熟,但是大多系统独立运行,随着北斗系统的应用规模逐步扩大,水下的定位、导航、授时服务的需求也逐步增多,水下声学导航定位系统架构必须自成体系、实现大规模应用,且能提供高精度的授时服务。现有公开的专利和文献仅对水声导航定位系统及方法进行了阐述,对于水下定位、导航、授时体系架构未见公开报道及全面解析。
申请号为CN201910424453专利“一种基于询问应答模式的水下高速目标高精度自主声学导航方法”、申请号为CN201910168348专利“一种基于同步信标模式的水下高速目标高精度自主声学导航方法”、申请号为CN201710303925专利“一种基于水声超短基线定位系统的声线修正方法及系统”、申请号为CN201410406943专利“一种基于近场源定位算法的多目标水声定位方法和系统”、申请号为CN201910538367专利“双基阵长基线水声定位方法及系统”、申请号为CN201910879274专利“一种水声定位系统及方法”,仅公开了水声导航、定位的方法和系统,也未涉及授时,仅阐述了用户端的导航、定位方法,未对体系架构进行全面阐述和解析。
申请号为CN200910090554专利“一种水下授时和同步方法及其系统”,公开了通过水声通信的方式进行水下授时和同步的方法和系统,未对时空基准的传递、信号体制进行阐述,也未对授时体系架构进行介绍和说明。
发明内容
本申请提供一种水下声学定位导航授时系统,以北斗时空基准进行水下声学定位、导航和授时,具有水下多用户高精度服务能力、自主定位、持续运行时间长等特点。
本发明技术方案如下:
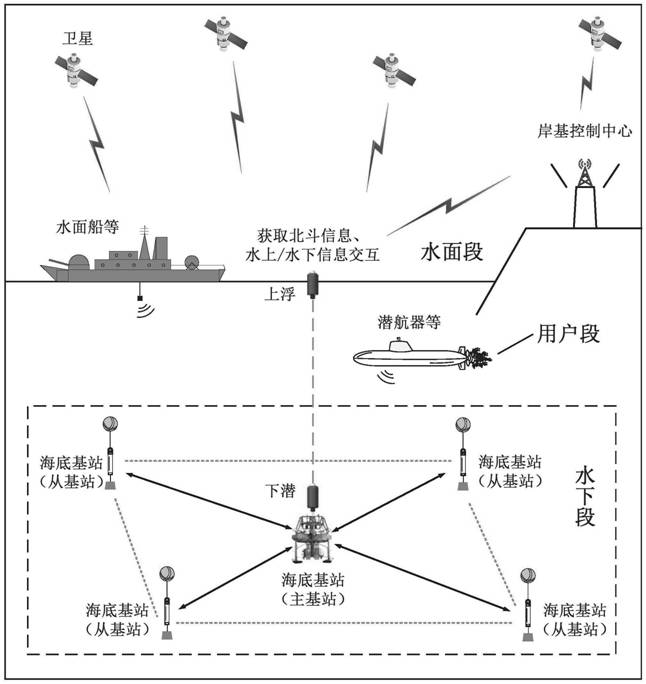
本发明提供一种水下声学定位导航授时系统,包括“三段一中心”:水面段、用户段、水下段和岸基控制中心;
所述水面段布设水上/水下基准传递装置,用于从北斗卫星导航系统获取北斗时空基准,并将时空基准传递到水下段;
所述用户段布设用户终端,用于以声学/多源紧耦合方式实现水下声学定位、导航、授时;
所述水下段布设海底基站,多个主、从海底基站构建海底基阵,用于发布水下时空基准,向所述用户段提供高精度的水下声学时空基准信息;
所述岸基控制中心用于监测所述水面段、用户段和水下段的工作状态,并将获取的数据进行精细化分析、处理和性能评估。
进一步优选的,所述水下段由多个主、从海底基站组成,包括但不限于海底声学信标、海底声学潜标,所述多个主、从海底基站按照预设阵形构建海底基阵。
进一步优选的,所述预设阵形为所述多个从基站按一定空间距离相对所述主基站布设,使所述海底基阵以所述主基站为中心将所述海底基阵所处的水下区域划分为满足不同导航定位精度要求的导航定位服务区域。
进一步优选的,所述满足不同导航定位精度要求的导航定位服务区域以所述主基站为中心,沿预设距离向外延伸依次包括近程导航区、远程导航区和引导区。
进一步优选的,所述近程导航区的导航定位精度大于所述远程导航区的导航定位精度,所述远程导航区的导航定位精度大于所述引导区的导航定位精度。
进一步优选的,所述主基站还用于自主定位。
进一步优选的,所述自主定位具体包括:所述主基站上浮至水面,以获取北斗时空基准,将所述北斗时空基准转换为水下时空基准,所述主基站潜至海底,完成一次自主定位。
进一步优选的,所述水上/水下基准传递装置具有双向通信功能,以使所述水面段向所述水下段传递北斗时空基准,及在卫星拒止服务时,所述水下段向所述水面段及其他水面或空中用户传递水下时空基准。
进一步优选的,所述水上/水下基准传递装置还用于测量与监控水下段。
进一步优选的,所述水下段发布的水下时空基准具有不同的信号体制,并用编码方式和加密方式进行区分。
进一步优选的,所述用户终端还用于根据多源传感器获取外界环境参数、信道参数、声速参数,并对所述环境参数进行修正、根据所述信道参数对信道进行估计与补偿、根据所述声速参数对声线进行修正。
进一步优选的,所述水面段布设的水上/水下基准传递装置具有多类型形态,包括但不限于UUV单体及编队、水面船、水面浮标。
进一步优选的,所述水下段具有多种工作模式,包括但不限于同步、伪同步、异步。
进一步优选的,所述导航定位功能与授时功能在信号体制上进行了一体化设计。
进一步优选的,所述用户段具有多种工作模式,包括但不限于有源、无源工作模式。
进一步优选的,所述岸基控制中心还用于数据精细化分析和性能评估。
依据上述实施例的水下声学定位导航授时系统,具有以下优点:
1)该系统架构对体系的空间分布进行了明确定义,体系从空间分布上分为三段一中心:水面段、用户段、水下段及岸基控制中心;
2)该系统架构具有水下多用户、多工作模式的定位、导航、授时服务能力,能够提供远距离低精度的引导服务和近距离高精度的导航定位服务;
3)该系统架构具有水上/水下时空基准统一、双向传递能力,系统能够提供水上到水下的时空基准传递服务,在卫星拒止服务的情况下,也提供水下到水上的反向时空基准传递服务;
4)该系统架构在军码、民码服务领域采用了不同的基准信息信号体制,并利用信息压缩和加密技术进行基准信息发布,另外具有通导一体化的信号体制,采用了“测距+位置”通导一体化的信号体制;
5)该系统架构具有多类型的时空基准形态,可利用多类型的导航定位基准为水下用户提供导航定位服务,多类型的基准形态包括但不限于UUV单体及编队、水面船、水面浮标等;
6)该系统架构水下段具有多种工作模式:同步工作、伪同步工作、异步工作等模式;
7)该系统架构具有高精度声学授时服务能力,定位与授时信息一体化;
8)该系统架构用户段具有自主误差获取和自主误差修正能力,能够自主获取外界环境参数、信道参数、声速参数等,并根据这些参数进行误差修正和补偿;
9)该系统架构用户段具有有源和无源两种工作模式;
10)该系统架构海底基阵的主基站具有自定位能力;
11)该系统架构用户段具有声学/多源紧组合信息融合能力。
附图说明
图1为水下声学定位导航授时系统架构示意图;
图2为水下区域导航范围示意图。
具体实施方式
下面通过具体实施方式结合附图对本发明作进一步详细说明。
本实施例提供了一种以北斗为时空基准的水下声学定位、导航、授时体系统,该体系架构主要以水声技术为核心进行设计,再辅以其他导航定位手段。本实施例提供的一种以北斗为时空基准的水下声学定位、导航、授时体系架构对体系的空间分布进行了明确定义、对服务区域(远程、近程)和服务精度(低精度、高精度)进行了明确说明、对导航定位和高精度授时进行了详细介绍,满足了快速发展的水下多种平台对水下声学定位、导航和授时的需求,具有水下高精度服务能力,尤其具有水上/水下时空基准传递、自主定位、持续运行时间长、多传感器高度兼容等特点,具有一定的创新性,该体系架构可为陆、海、空、天一体化的国家PNT体系建设规划的完善提供技术支撑。
本实施例提供的水下声学定位导航授时系统架构示意图如图1所示,包括水面段、用户段、水下段和岸基控制中心。
水面段布设有水上/水下基准传递装置,用于从北斗卫星导航系统获取北斗时空基准,并将获取的北斗时空基准传递至水下段。
本实施例中的水面段主要功能是从卫星获取北斗时空基准,通过水上/水下基准传递装置将北斗时空基准传递到水下段中,构建水上/水下时空基准统一,同时也可从水下段中获取相关信息用于测量与监控。所述的水上/水下时空基准传递为水上/水下双向时空基准传递,在体系正常运行情况下,提供水上到水下的时空基准传递服务;在卫星拒止服务的情况下,还能提供水下到水上的反向时空基准传递服务,扩展水下声学定位、导航、授时体系功能。优选的,水面段布设的水上/水下基准传递装置具有多类型形态,包括但不限于UUV单体及编队、水面船、水面浮标。
用户段具有多种工作模型,例如,包括但不限于有源工作模式、无源工作模型,用户段布设有用户终端;用户段用于以声学/多源紧耦合方式实现水下声学定位、导航、授时,用户终端包括但不限于UUV、AUV、深海探测器、水面船、水面无人艇等。在用户段中安装的终端包括但不限于声呐、惯导、多普勒计程仪、卫导、温盐深传感器、重力仪、磁力仪、原子钟、激光器、海流计等多种传感器接口,可根据不同被控单元连接不同的传感器,利用自适应的声学/多源紧组合方式进行信息融合,从而实现水下声学的定位、导航与授时。所述的用户终端具有自主误差获取和自主误差修正能力,根据多源传感器能够自主获取外界环境参数等,并根据这些参数进行误差修正和补偿。
进一步,本实施中,还包括用户段环境参数获取与误差修正,具体的:水下段发布的基准信息在水下传播时,易受水声信道起伏影响,必须根据外界环境参数进行误差修正及补偿,才能获得较高精度的基准信息。用户段的用户终端根据多源传感器能够自主获取外界环境参数、信道参数、声速参数等,并根据这些参数进行环境参数修正、信道估计与补偿、声线修正、多普勒补偿等。
进一步,本实施例的用户段还具有自适应的声学/多源紧组合信息融合功能:用户段的用户终端多种多样,包含AUV、UUV、水中兵器、深海探测器、油气勘探设备、海底固体矿产采矿车等军用和民用用户。不同用户对水下定位导航授时需求也不相同,如定位导航精度、作用距离、隐蔽性、导航定位帧率等方面,需保证多种组合状态的自动切换、保证组合状态切换的平稳性。用户段自适应的声学/多源紧组合信息融合采用了多类型用户水下自适应定位导航技术,兼容多种用户需求,并根据不同用户需求自主切换水下定位导航方式。多源信息主要包括惯导信息、声学导航信息、物理场匹配信息等。惯导信息有位置、速度、加速度、姿态和航向等,声学导航信息有时延、时延差、距离、方位、高度角、信噪比、信号置信级等,物理场匹配导航信息有地形信息、地磁场数值、重力加速度、重力场垂直梯度等。
水下段具有多种工作模型,例如,包括但不限于同步、伪同步、异步等工作模型。水下段布设有海底基站,多个主、从海底基站构建海底基阵,用于发布水下时空基准,向用户段提供高精度的水下声学时空基准信息。
本实施例中,所述的水下段,其功能是为用户段提供水下时空基准信息的发布,为用户段提供大范围的定位导航授时服务,其中,水下段包括主海底基站和多个从海底基站,主海底基站和多个从海底基站按照预设阵形构建海底基阵;该预设阵形为多个从海底基站按一定空间距离相对主海底基站布设,使海底基阵以所述主海底基站为中心将海底基阵所处的水下区域划分为满足不同导航定位精度要求的导航定位服务区域。该满足不同导航定位精度要求的导航定位服务区域以所述主海底基站为中心,沿预设距离向外延伸依次包括近程导航区、远程导航区和引导区。近程导航区的导航定位精度大于远程导航区的导航定位精度,远程导航区的导航定位精度大于引导区的导航定位精度。
具体的,本实施例的水下段由多个海底基站组成,包括但不限于海底声学信标、海底声学潜标形态,多个海底基站构建了海底基阵,利用高精度标定设备对海底基站进行高精度位置标定,测定海底基阵的大地坐标,为用户的定位导航与授时提供初始空间基准。按照功能划分,海底基站又分为主基站和从基站,所述的主基站具有自主定位功能,通过自主上浮获取高精度的时空基准,利用水上/水下坐标转换将北斗时空基准转换为水下时空基准,从而完成水下段海底基阵的构建。
本实施例的水下段具有大范围服务能力,具体表现为:水下定位导航功能的实现主要依赖于声学基阵与用户终端,海底基阵为用户终端提供声学导航基准,用户终端可将声学导航信息及其他多源信息进行融合,为用户提供高精度的定位导航结果。结合不同的应用需求,利用组合方式构建水下导航服务区域,以满足远程与近程、低精度与高精度的不同导航需求。
如图2所示,由海底基站组成的海底基阵内,可实现近程高精度导航区,适用于对导航定位精度较高的用户;在近程高精度导航区外,距离主信标约50km的距离内,属于远程低精度导航区,适用于对作用距离要求高但是对导航定位精度要求较低的用户;在距离主信标约50km~100km的范围内,属于引导区,用于水下用户的航向引导。
进一步,本实施例的水下段的主海底基站具有自主定位功能:主海底基站除常规的被动标校功能外,还具有自主定位功能,在需要自主定位情况下,主海底基站启动自主上浮至水面,获取高精度的时空基准,利用水上/水下基准传递装置将北斗时空基准转换为水下时空基准,主海底基站再启动自主下潜至海底,完成一次自主定位。
进一步,本实施例的水上/水下基准传递装置具有双向通信功能,以使水面段向水下段传递北斗时空基准,及在卫星拒止服务时,水下段向所述水面段传递水下时空基准。且,水下段传递水下时空基准之前,还用于根据所传递的水下时空基准的用途需求选择匹配的信号发布体制。
具体的,水下段发布的水下时空基准具有不同的信号体制,并用编码方式和加密方式进行区分,具体为:由于水下声学定位、导航、授时体系需兼容多种应用场景,包括但不限于军事用途、国民经济建设以及科学研究等,不同的应用场景对声学海底基准的要求也不同。用于军事用途时,要求水下定位、导航、授时体系安全性高、隐蔽性高;用于民用以及科学研究时,对水下定位、导航、授时体系的安全性与隐蔽性要求不高,但是需要满足相应的功能要求,因此对声学基准的信号体制进行优化设计,将信号体制分为军码和民码两种,通过“测距+位置”的编码方式与加密方式进行区分,提高水下定位、导航、授时体系的安全性能。另外,采用了通导一体化的架构形式,使导航定位功能与授时功能在信号体制上进行了一体化设计,也即是,将通信与水下定位导航与授时功能融为一体,扩展体系功能,在提供定位导航与授时服务的同时,实现水上与水下之间、水下各平台之间的信息交互,加大水下信息的透明度。
岸基控制中心用于监测水面段、用户段和水下段的工作状态,并将获取的数据进行精细化分析、处理和性能评估。
本实施例的岸基控制中心可作为终端处理中心或作为中继中心,通过北斗卫星或者无线方式控制水面船或潜浮标,监测水下声学定位、导航、授时系统的工作状态。此外,岸基控制中心将获取的海上试验数据进行精细化处理、对比分析和性能评估,制定精度/误差评估标准,为体系的后续建设与发展提供参考依据。
本实施例的水下声学定位导航授时系统,基于北斗时空基准的水下声学定位、导航、授时体系以水声技术为核心进行设计,将水声导航定位与授时功能融为一体,再辅以其他导航定位授时手段,该架构主要由水上/水下时空基准传递装置、海底主基站和从基站、用户终端、岸基控制中心等组成,具有水上/水下时空基准双向传递功能、持续运行时间长、水下高精度授时以及多传感器高度兼容等特点。
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
- 一种水下声学定位导航授时系统
- 一种适用于单片微型定位导航授时系统的集成电路