一种智能移动垃圾桶
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及生活及办公用品技术领域,具体为一种智能移动垃圾桶。
背景技术
在智能化技术不断创新,在家居产品不断涌现智能化的背景下,智能化技术也在不断实现降本,各类人工智能方案正在不断地实现,家居日常用品,智能化产品将给人们带来极大的便捷性,全新的体验感及实用性;可以利用App、语音、手势、无线开关等等方式,来完成远程控制家居产品的工作模式;
垃圾桶是家居必备用品之一,现有垃圾桶仅仅只能完成对垃圾的盛装功能,还需要人工来回移动寻找,才能完成投掷和盛装,使用较为不便。
发明内容
本发明的目的在于提供一种智能移动垃圾桶,具备对垃圾桶智能化控制,使垃圾桶移动至需要使用的位置,提高垃圾桶使用智能化,实现智能化家居体验的优点,解决了现有垃圾桶仅仅只是对垃圾盛装,还需要人工来回移动寻找才能完成投掷和盛装,使用较为不便的问题;
为实现上述目的,本发明提供如下技术方案:一种智能移动垃圾桶,包括垃圾桶本体以及对垃圾桶本体控制的智能系统,所述垃圾桶包括桶盖、桶体以及脚轮,所述桶盖通过拉杆设于桶体的顶部,所述脚轮通过驱动电机设于桶体的底部,所述智能系统设于桶体内部;
所述智能系统包括智能模块、障碍物感应器、语音识别模块以及电池,所述障碍物感应器、语音识别模块以及电池与智能模块输入端连接,所述智能模块的输出端连接有显示器,所述智能模块的输入端对应桶体内底部设有重量传感器,所述智能模块的输出端与拉杆和驱动电机的输入端连接。
进一步的,所述脚轮采用万向轮结构设置。
进一步的,所述显示器包括电量显示、警示显示、垃圾已放置时间显示以及垃圾重量显示等等。
进一步的,所述桶盖由制动电机实现打开或关闭。
进一步的,所述语音识别模块的输入端连接有实现接收定位的无线开关。
与现有技术相比,本发明的有益效果如下:
1、本发明通过在垃圾桶本体内部设置智能系统,并通过智能系统设置智能模块、障碍物感应器、语音识别模块、电池以及显示器,实现使用者在距离垃圾桶有一定距离,或忘记垃圾桶位置,导致不能直接将垃圾快速放置于桶体内部时,使用者可以用几种方式,实现对垃圾桶的控制,对垃圾桶本体发出呼叫的声音,实现对垃圾桶本体的智能系统的唤醒,智能系统通过语音识别模块和对使用者发出的指令识别反馈至智能模块,通过智能模块感知使用者发出声音的方向,并计算使用者与垃圾桶之间的距离对垃圾桶本体驱动,移动过程中,障碍物感应器对垃圾桶本体移动过程遇到的障碍物阻挡移动时,则对脚轮改变移动方向,继续向使用者发出声音的位置移动,在垃圾桶本体移动过程中时没有障碍物时,垃圾桶本体自动识别位置,计算距离后统计驱动电机驱动脚轮移动至使用者的位置;
2、通过无线开关按钮,实现对垃圾桶本体的智能系统的唤醒,智能系统通过无线开关按钮反馈至智能模块,并计算使用者与垃圾桶之间的距离对垃圾桶本体驱动,移动过程中,障碍物感应器对垃圾桶本体移动过程遇到的障碍物阻挡移动时,则对脚轮改变移动方向,继续向使用者的位置移动,在垃圾桶本体移动过程中时没有障碍物时,垃圾桶本体自动识别位置,驱动电机驱动脚轮移动至使用者的位置,从而实现了垃圾桶在日常生活中的智能化,提高家居生活体验的便捷性。
实现通过语言识别或无线开关确定位置,并能实现打开桶盖及闭合桶盖的动作,并可以通过语音识别或无线开关指令,返回垃圾桶的休息区,在电池电量消耗到一定量时,可以在休息区自动完成充电过程;该智能移动垃圾桶,通过垃圾桶可移动的智能化运用,将给人们的家用电器人工智能生态链、办公区、商业区等场所的人工智能生态链带来极大的便利。
附图说明
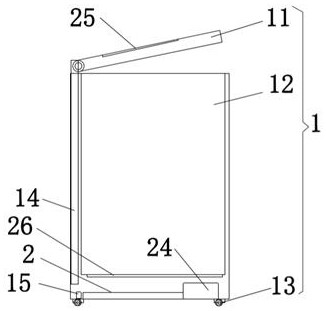
图1为本发明整体结构示意图;
图2为本发明智能系统原理结构示意图。
图中:1、垃圾桶本体;11、桶盖;12、桶体;13、脚轮;14、拉杆;15、驱动电机;2、智能系统;21、智能模块;22、障碍物感应器;23、语音识别模块;24、电池;25、显示器;26、重量传感器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-2,一种智能移动垃圾桶,包括垃圾桶本体1以及对垃圾桶本体1控制的智能系统2,所述垃圾桶本体1包括桶盖11、桶体12以及脚轮13,所述桶盖11通过拉杆14设于桶体12的顶部,所述脚轮13通过驱动电机15设于桶体12的底部,所述智能系统2设于桶体12内部;
所述智能系统2包括智能模块21、障碍物感应器22、语音识别模块23以及电池24,智能模块21采用可编程的中央处理器结构设置,所述障碍物感应器22、语音识别模块23以及电池24与智能模块21输入端连接,所述智能模块21的输出端连接有显示器25,所述智能模块21的输入端对应桶体12内底部设有重量传感器26,所述智能模块21的输出端与拉杆14和驱动电机15的输入端。
具体的,所述脚轮13采用万向轮结构设置。
具体的,所述显示器25包括电量显示、警示显示、垃圾已放置时间显示以及垃圾重量显示。
使用时,使用者在距离垃圾桶本体1有一定距离或忘记垃圾桶位置,不能直接将垃圾放置于桶体12内部时,使用者发出对垃圾桶本体1呼叫的声音,对垃圾桶本体1的智能系统2唤醒,智能系统2通过语音识别模块23对使用者发出的指令识别反馈至智能模块21,通过智能模块21感知使用者发出声音的方向,并计算使用者与垃圾桶本体1之间的距离对垃圾桶本体1驱动,移动过程中,障碍物感应器22对垃圾桶本体1移动过程遇到的障碍物阻挡移动时则对脚轮13改变移动方向,继续向使用者发出声音的位置移动,在垃圾桶本体1移动过程中时没有障碍物时,垃圾桶本体1自动识别位置,计算距离后统计驱动电机15驱动脚轮13移动至使用者的位置,从而实现了垃圾桶在日常生活中的智能化,提高家居生活体验的便捷性;
可实现打开桶盖及闭合桶盖的动作,桶体通过语音识别模块23以及无线开关返回垃圾桶的休息区,在电池电量消耗到一定量时,可以在休息区自动完成充电。
另外,智能移动垃圾桶外置无线开关控制器,无线开关控制器可以放置任何地方,前提是智能移动垃圾桶可以接收信号,使用者按下无线开关控制器时,智能移动垃圾桶即向无线开关控制器的位置精准移动,同时,实现可以避让障碍物,直至到达位置。
综上所述:通过在垃圾桶本体1内部设置智能系统2,并通过智能系统2设置智能模块21、障碍物感应器22、语音识别模块23、电池24以及显示器25,电池24对智能系统2的正常运行提供电量,通过显示器25对电池24的电量显示,便于在电池24电量不足时及时补充电能,语音识别模块23对使用者发出的语音指令识别并反馈至智能模块21,智能模块21对语音识别模块23识别的语音位置、方向、内容分析并发送至驱动电机15,通过驱动电机15驱动脚轮13移动,移动过程中,障碍物感应器22对移动过程中遇到的障碍物感应,感应到障碍物时将信息反馈至智能模块21,智能模块21将信息发送至驱动电机15,驱动电机15驱动脚轮13转动躲开障碍物,移开障碍物后脚轮继续向使用者的方向移动,实现垃圾桶的智能化使用。
自动充电:移动智能垃圾桶设有无线充电,家居电源处插入无线充电电板,当移动智能垃圾桶电量不足时,移动智能垃圾桶自动移动到电板处进行充电。
- 一种智能垃圾桶盖及包括该智能垃圾桶盖的垃圾桶
- 一种可自移动的智能变容量垃圾桶