用于眼内透镜选择的系统和方法
文献发布时间:2023-06-19 09:54:18
相关申请的交叉引用
本申请要求于2018年7月12日提交的并且标题为“OPTHALMIC IMAGING SYSTEMFOR INTRAOCULAR LENS POWER PREDICTION[用于眼内透镜焦度预测的眼科成像系统]”的美国临时专利申请号62/697,367的权益,其全部内容通过援引并入本文。
背景
技术领域
本披露涉及使用眼睛的多维图像来辅助选择要植入的眼内透镜的系统和方法。
背景技术
白内障手术涉及移除眼睛的天然晶状体并且在大多数情况下用人工眼内透镜(IOL)来替换天然晶状体。为了实现最佳的术后视觉结果,好的术前手术计划至关重要。一些重要的术前计划决策是选择合适的IOL焦度和估计有效透镜位置(ELP),所述选择和估计是根据取自患者眼睛的解剖学和光学特征并用于一个或多个IOL焦度计算公式中的测量值来确定的。参见例如Cooke等人“Comparison of 9 Intraocular Lens Power CalculationFormulas[9个眼内透镜焦度计算公式的比较]”,J.Cataract Refract.Surg.[白内障与屈光手术],第42卷,第1157-64页,2016年;Goto等人“Prediction of PostoperativeIntraocular Lens Position with Angle-to-Angle Depth Using Anterior SegmentOptical Coherence Tomography[使用眼前段光学相干断层扫描通过角对角深度预测术后眼内透镜位置]”,Ophthalmology[眼科学],第123卷,第2474-80页,2016年;Kane等人“Intraocular Lens Power Formula Accuracy:Comparison of 7 Formulas[眼内透镜焦度公式准确性:7个公式的比较]”,J.Cataract Refract.Surg.[白内障与屈光手术],第42卷,第1490-1500页,2016年;Martinez-Enriquez等人“Estimation of Intraocular LensPosition from Full Crystalline Lens Geometry:Towards a New Generation ofIntraocular Lens Power Calculation Formulas[根据全结晶透镜几何形状估计眼内透镜位置:迈向新一代眼内透镜焦度计算公式]”,Nature Scientific Reports[自然科学报告],第8:9829卷,2018年;Melles等人“Accuracy of Intraocular Lens CalculationFormulas[眼内透镜计算公式的准确性]”,Ophthalmology[眼科学],第125(2)卷,第1-10页;Norrby等人“Prediction of the True IOL Position[真实IOL位置的预测]”,Ophthalmology[眼科学],第101卷,第1440-46页,2017年;以及Olsen“Calculation ofIntraocular Lens Power:A Review[眼内透镜焦度的计算:综述]”,Acta OphthalmolScand[眼动学报],第85卷,第472-85页,2007年,所述文献各自的全部内容通过援引并入本文。
通常,用于IOL预测公式中的测量值是使用光学和/或超声生物计取自光轴上的一维测量值。这些传统的测量实践导致ELP不准确,进而导致IOL焦度的选择使得患者的视力结果次佳。
因此,在本领域中需要用于术前评估患者眼睛以测量解剖学参数的技术,这些解剖学参数可以用于更好地选择进行植入的眼内透镜,从而使得患者的视力结果最佳。
发明内容
根据一些实施例,一种方法包括:通过实施预测引擎的一个或多个计算装置接收眼睛的一个或多个术前多维图像;通过所述预测引擎、基于所述眼睛的一个或多个术前图像提取所述眼睛的一个或多个术前测量值;通过所述预测引擎使用基于机器学习策略的第一预测模型、基于所提取的眼睛的一个或多个术前测量值来估计眼内透镜的术后位置;至少基于所估计的眼内透镜的术后位置来选择所述眼内透镜的焦度;以及至少基于所选择的焦度来选择所述眼内透镜。
根据一些实施例,预测引擎包括一个或多个处理器。预测引擎被配置为接收由诊断装置获得的眼睛的一个或多个术前多维图像;基于所述眼睛的一个或多个术前图像提取所述眼睛的一个或多个术前测量值;使用基于机器学习策略的第一预测模型、基于所提取的眼睛的一个或多个术前测量值来估计眼内透镜的术后位置;至少基于所估计的眼内透镜的术后位置来推荐所述眼内透镜的焦度;以及向用户提供推荐焦度,以有助于选择用于植入的眼内透镜。
根据一些实施例,一种非暂态机器可读介质包括多个机器可读指令,所述指令在被一个或多个处理器执行时被适配成致使所述一个或多个处理器执行一种方法。所述方法包括:接收眼睛的一个或多个术前多维图像;基于所述眼睛的一个或多个术前图像提取所述眼睛的一个或多个术前测量值;使用基于机器学习策略的预测模型、基于所提取的眼睛的一个或多个术前测量值来估计眼内透镜的术后位置;至少基于所估计的眼内透镜的术后位置来推荐所述眼内透镜的焦度;以及向用户提供推荐焦度,以有助于选择用于植入的眼内透镜。
附图说明
为了更加全面地理解本技术、其特征及其优点,参考结合附图给出的以下说明。
图1是根据一些实施例的用于IOL选择的系统的图。
图2是根据一些实施例的使用预测引擎植入IOL的方法的图。
图3是根据一些实施例的测量眼睛特征的方法的图。
图4是根据一些实施例的眼睛和眼睛特征的图。
图5A和图5B是根据一些实施例的处理系统的图。
图6是根据一些实施例的多层神经网络的图。
在附图中,具有相同标号的要素具有相同或相似的功能。
具体实施方式
展示本发明的方面、实施例、实施方式或模块的描述和附图不应被视为限制,而是权利要求定义了受保护的发明。在不脱离本说明书和权利要求的精神和范围的情况下,可以进行各种机械的、组成的、结构的、电气的和操作上的改变。在某些情况下,未详细示出或描述公知的电路、结构或技术,以免模糊本发明。在两个或更多个图中的相似的数字表示相同或相似的要素。
在本描述中,阐述了描述与本披露一致的一些实施例的具体细节。为了提供对实施例的透彻理解,阐述了许多具体细节。然而,对于本领域技术人员将清楚的是,一些实施例可以在没有一些或所有这些具体细节的情况下实践。本文披露的具体实施例意在说明而非限制。本领域技术人员可以实现尽管在这里没有具体描述但是在本披露的范围和精神内的其他要素。另外,为了避免不必要的重复,与一个实施例相关联示出和描述的一个或多个特征可以结合到其他实施例中,除非另外特别说明或者如果该一个或多个特征会使实施例不起作用。
下文所述的技术涉及的系统和方法通过监督机器学习使用训练患者的眼睛的术前和术后多维图像的集合来预测术后前房深度、新患者的眼内透镜(IOL)的焦度和术后显然验光等效球镜度数(MRSE)。
如上所解释的,IOL焦度预测传统上依赖于光学和/或超声生物计的测量值。用于IOL焦度计算公式中的一些更常用的测得眼睛特征是角膜曲率半径(K)、眼轴长度(AL)(其包括眼睛的前房深度(ACD))、晶状体厚度、玻璃体腔深度、角膜缘边界之间的水平距离(也称为角膜白对白距离)和/或类似物。
但是,患者眼睛的二维或三维测量值提供了额外的解剖学细节,该细节可以用于更好地预测术后前房深度(也称为估计的透镜位置(ELP))和IOL焦度。在一些示例中,使用更好的预测机制可以用于改善MRSE中的术后屈光结果。
本披露的一些实施例涉及获得呈患者集合的眼睛的二维或三维图像形式的术前和术后诊断训练数据、从新患者的术前诊断图像获得多个测量值、以及使用一种或多种机器学习技术来创建预测模型,该预测模型用于基于新患者的多个测量值来计算新患者的术后前房深度(ACD
图1展示了根据一些实施例的用于IOL选择的系统的系统100。系统100包括经由网络115与一个或多个诊断训练数据源110联接的IOL选择平台105。在一些示例中,网络115可以包括一个或多个切换装置、路由器、局域网(例如,以太网)、广域网(例如,因特网)和/或类似物。每个诊断训练数据源110可以是可通过眼科手术实践、眼科诊所、医科大学、电子病历(EMR)存储库和/或类似物获得的数据库、数据储存库、和/或类似物。每个诊断训练数据源110可以为IOL选择平台105提供呈以下中的一种或多种的形式的训练数据:患者术前和术后眼睛的多维图像、手术规划数据、手术控制台参数日志、手术并发症日志、患者病史、患者人口统计数据、和/或类似物。IOL选择平台105可以将训练数据存储在一个或多个数据库155中,所述数据库可以被配置用于对训练数据进行匿名化、加密和/或以其他方式进行安全保护。
IOL选择平台105包括预测引擎120,所述预测引擎可以(如下文更详细解释的)处理所接收的训练数据、从多维图像中提取测量值、对训练数据进行原始数据分析、训练机器学习算法和/或模型以基于术前测量值来预测ACD
IOL选择平台105进一步经由网络115联接至眼科实践场125的一个或多个装置。该一个或多个装置包括诊断装置130。诊断装置130用于获得患者135的眼睛的一个或多个多维图像。诊断装置130可以是用于获得眼科解剖学结构的多维图像的多个装置中的任何装置,比如光学相干断层扫描(OCT)装置、旋转相机(例如,Scheimpflug相机)、磁共振成像(MRI)装置、和/或类似物。
眼科实践场125还可以包括一个或多个计算装置140,该一个或多个计算装置用于从诊断装置130获得患者135的多维图像并将多维图像发送到IOL选择平台105。该一个或多个计算装置140可以是以下中的一项或多项:独立式计算机、平板电脑和/或其他智能装置、手术控制台、集成到诊断装置130中的计算装置、和/或类似物。
IOL选择平台105可以接收患者135的多维图像,从图像中提取测量值,并基于测量值并使用预测引擎120生成预测的ACD
诊断装置130可以进一步用于在患者135进行白内障移除并且使用由预测引擎120提供的所选择的IOL焦度进行IOL植入之后获得患者的术后多维图像。然后,该一个或多个计算装置140可以将患者135的术后多维图像发送至IOL选择平台105,以用于迭代地训练和/或更新预测引擎120所使用的模型,以纳入患者135的信息来供未来患者使用。
预测的ACD
在一些实施例中,IOL选择平台105可以进一步包括手术规划器150,所述手术规划器可以用于向眼科实践场125提供使用预测的ACD
在一些实施例中,系统100可以进一步包括独立式手术规划器160,和/或眼科实践场125可以进一步包括在该一个或多个计算装置140上的手术规划器模块170。
根据一些实施例,下文进一步详细描述的方法可以利用可以从眼科解剖学结构的多维图像中提取的测量值,而不是使用光学和/或超声生物计的一维轴上测量值和/或取自眼睛的前视图图像(例如,Placido图像)上的白对白测量值。由于多种原因,一维测量值对于预测ACD
本文更详细描述的实施例通过使用多维诊断图像以及优于光学和/或超声生物计的已知测量值的各种新测量值来预测ACD
i.角对角宽度,该角对角宽度描述了连接术前眼睛的角膜的两个角形凹部中的每者的线的宽度;
ii.角对角深度,该角对角深度被测量为连接术前眼睛的角膜的两个角形凹部中的每者的线上的交点与术前眼睛的角膜后表面之间的垂直距离;
iii.当术前眼睛注视注视点时术前眼睛的瞳孔轴与术前眼睛的视线轴之间的角度;和/或
iv.透镜赤道部的估计位置,该估计位置被确定为透镜前半径和透镜后半径的两个交点中的每者之间的赤道线。
如上文讨论的以及在此进一步强调的,图1仅是示例,而不应不当地限制权利要求的范围。本领域普通技术人员应认识到许多变化、替代方案和修改。根据一些实施例,IOL选择平台130和/或IOL选择平台的一个或多个部件(比如数据库155、预测引擎120、和/或手术规划器150)可以集成到眼科实践场125的该一个或多个装置中。在一些示例中,计算装置140可以管控IOL选择平台105、数据库155、预测引擎120、和/或手术规划器150。在一些示例中,手术规划器150可以与手术规划器170组合。
图2是根据一些实施例的使用预测引擎植入IOL的方法200的图。方法200的过程210-290中的一个或多个过程可以至少部分地以存储在非暂态有形机器可读介质上的可执行代码的形式来实施,所述可执行代码在被一个或多个处理器(例如,预测引擎120、IOL预测平台、诊断装置140、该一个或多个计算装置140、和/或手术规划器150、160和/或170中的一个或多个手术规划器的处理器)运行时可以致使该一个或多个处理器执行过程210-290中的一个或多个过程。
在过程210,获得一个或多个术前图像。在一些示例中,该一个或多个术前图像可以包括多维图像。在一些示例中,该一个或多个术前图像可以使用诊断装置(比如诊断装置130)、OCT装置、旋转(例如,Scheimpflug)相机、MRI装置、和/或类似物获得。在一些示例中,可以将该一个或多个术前图像提供给预测引擎(比如预测引擎120)。
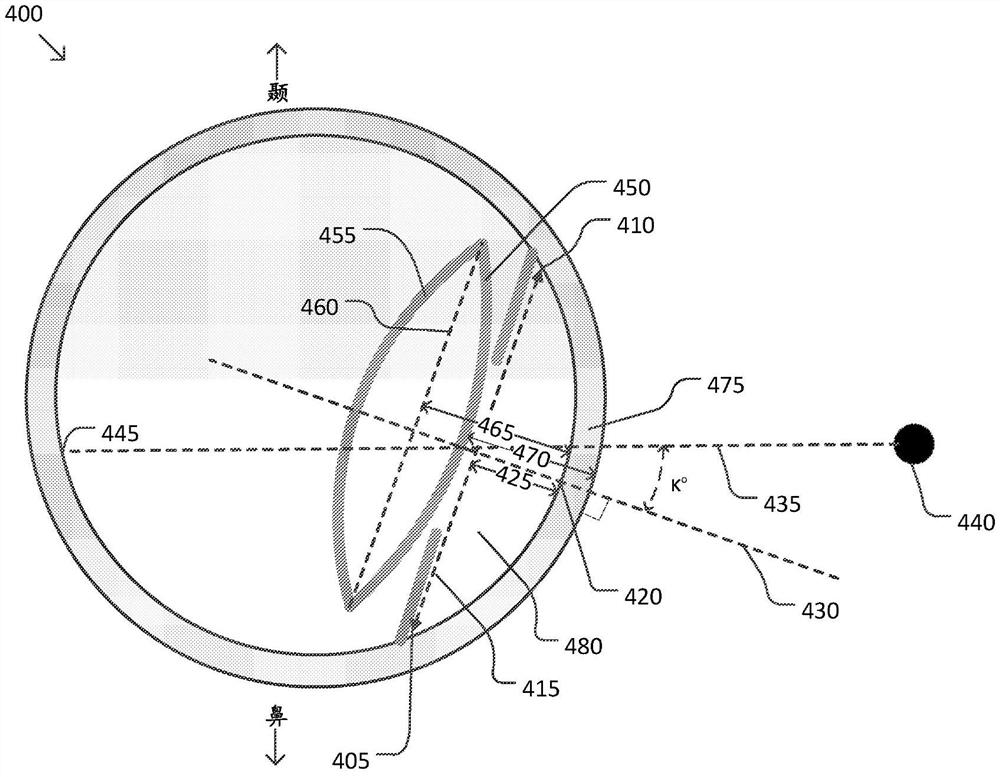
在过程220,可以从一个或多个术前图像中提取一个或多个术前测量值。在一些示例中,可以由预测引擎(比如预测引擎120)执行提取。根据一些实施例,可以根据如图3所示的测量眼睛特征的方法300,经由在该一个或多个术前图像中捕获的眼睛的解剖学结构的各个方面的测量值来提取该一个或多个术前测量值。方法300的过程310-390中的一个或多个过程可以至少部分地以存储在非暂态有形机器可读介质上的可执行代码的形式来实施,所述可执行代码在被一个或多个处理器(例如,预测引擎120、IOL预测平台、和/或类似物的处理器)运行时可以致使该一个或多个处理器执行过程310-390中的一个或多个过程。在一些实施例中,过程340是可选的并且可以被省略。关于图4描述方法300的应用,该图是根据一些实施例的眼睛400和眼睛特征的图。
在过程310,分别识别眼睛的前房480的鼻角405和颞角410。在一些示例中,通过(例如,使用一种或多种边缘检测和/或区域检测算法)识别标识眼睛的前房480的结构并注意在前房480的朝向前房480的颞范围和鼻范围定位的边缘处的锐角,可以从眼睛的该一个或多个图像(例如,在过程210期间获得的该一个或多个术前图像)来识别前房480的鼻角405和颞角410。
在过程320,确定前房480的角对角宽度。在一些示例中,前房480的角对角宽度对应于在过程310期间识别出的鼻角405与颞角410之间的线415的长度。
在过程330,识别眼睛的角膜后表面420。在一些示例中,通过(例如,使用一种或多种边缘检测和/或区域检测算法)识别标识眼睛的角膜475和/或前房480的结构并注意角膜475与前房480之间的过渡,可以从眼睛的该一个或多个图像(例如,在过程210期间获得的该一个或多个术前图像)来识别角膜后表面420。
在可选过程340,确定瞳孔平面的深度。在一些示例中,瞳孔平面的深度对应于角膜后表面420与角形凹部之间的线415的垂直距离,对应于(在过程320期间识别的)线415与(在过程330期间识别的)角膜后表面420之间的线425的长度(该线垂直于线415,并且在到达角膜后表面420为止具有最长的长度)。
在过程350,识别眼睛的瞳孔轴430和视线轴435。在一些示例中,瞳孔轴435对应于通过延伸在过程340期间确定的垂直距离线425而形成的轴线。在一些示例中,视线轴435可以通过识别眼睛400的视力所注视到的注视点440与中央凹445之间的线来确定。
在过程360,确定瞳孔轴430和视线轴435之间的角度κ。
在过程370,识别眼睛的晶状体前表面450和晶状体后表面455。在一些示例中,通过(例如,使用一种或多种边缘检测和/或区域检测算法)识别标识眼睛的晶状体的结构并注意眼睛的晶状体与悬韧带、瞳孔和/或玻璃体液之间的过渡,可以从眼睛的该一个或多个图像(例如,在过程210期间获得的该一个或多个术前图像)来识别晶状体前表面450和/或晶状体后表面455。
在过程380,确定晶状体的赤道部的位置。在图4的示例中,晶状体的赤道部对应于线460。在一些示例中,晶状体的位置对应于沿瞳孔轴430测量的在晶状体的赤道部(例如,线460)与角膜后表面420之间的垂直距离。在一些示例中,晶状体的赤道部通常不位于(在过程370期间识别的)晶状体前表面450与晶状体后表面455之间的中点,因为晶状体后部部分的厚度通常比晶状体的前部部分厚。在一些示例中,可以根据等式1来估计晶状体的赤道部(例如,线460)距晶状体前表面450的位置,其中r是晶状体的直径的一半(例如,线460的长度的一半),并且R1是晶状体前表面450的半径。在一些示例中,可以根据等式2来估计晶状体的赤道部距晶状体后表面的位置,其中R2是晶状体后表面455的半径。在一些示例中,可以使用等式1和等式2的组合来确定晶状体的赤道部的位置的估计。在一些示例中,可以使用回归分析来确定半径R1和/或R2,以分别找到与晶状体前表面450和晶状体后表面455最佳拟合的圆弧。
在过程390,确定眼睛的前房深度(ACD)。在图4的示例中,ACD对应于沿瞳孔轴430在角膜后表面420与晶状体前表面450之间的垂直距离470。
如上文讨论的以及在此进一步强调的,图3仅是示例,而不应不当地限制权利要求的范围。本领域普通技术人员应认识到许多变化、替代方案和修改。根据一些实施例,可以确定眼睛的解剖学结构的额外测量值。在一些示例中,额外测量值可以包括眼睛的角膜焦度。
返回参考图2,在过程230,使用预测模型来估计术后前房深度(ACD
在过程240,选择眼内透镜(IOL)焦度。在一些示例中,可以使用预测模型来确定推荐的IOL焦度。在一些示例中,预测模型可以对应于预测引擎120所使用的一个或多个预测模型中的一个预测模型,该一个预测模型已经基于之前的透镜植入过程和对应的患者结果之前进行了训练,如下文关于过程290进一步详细描述的。在一些示例中,在过程220期间确定的眼睛特征中的一个或多个眼睛特征和/或在过程230期间估计的ACD
在过程250,估计术后MRSE(MRSE
在过程260,植入IOL。在一些示例中,可以在与过程380期间确定的晶状体的赤道部的估计位置相对应的位置处植入具有在过程240期间选择的IOL焦度和基于晶状体的位置和/或直径、和/或类似物的尺寸的IOL。
在过程270,可以获得一个或多个术后图像。在一些示例中,可以使用类似于过程210的过程但是在过程260期间将IOL植入之后来获得该一个或多个术后图像。
在过程280,获得眼睛的一个或多个术后测量值。在一些示例中,该一个或多个术后测量值可以包括在植入IOL之后IOL的ACD
在过程290,更新该一个或多个预测模型。在一些示例中,在过程220期间提取的该一个或多个术前测量值、在过程280期间提取的ACD
如上文讨论的以及在此进一步强调的,图2仅是示例,而不应不当地限制权利要求的范围。本领域普通技术人员应认识到许多变化、替代方案和修改。根据一些实施例,除了ACD
在一些实施例中,其他预测模型(例如,神经网络模型)可以被训练并用于改善方法200的其他方面,包括例如在过程240期间选择IOL焦度的预测模型。
图5A和图5B是根据一些实施例的处理系统的图。虽然图5A和图5B示出了两个实施例,但是本领域普通技术人员还应容易了解的是,其他系统实施例是可能的。根据一些实施例,图5A和/或图5B的处理系统代表可以包含在以下一者或多者中的计算系统:IOL选择平台105、眼科实践场125、预测引擎120、诊断装置130、该一个或多个计算装置140、手术规划器150、160、和/或170中的任一个、和/或类似物。
图5A展示了计算系统500,其中系统500的部件使用总线505彼此电连通。系统500包括处理器510和系统总线505,所述系统总线将各个系统部件(包括,呈只读存储器(ROM)520、随机存取存储器(RAM)525和/或类似物(例如,PROM、EPROM、FLASH-EPROM和/或任何其他存储芯片或盒)形式的存储器)联接至处理器510。系统500可以进一步包括与处理器510直接连接、与之紧邻、或集成为其一部分的高速存储器的缓存512。系统500可以通过缓存512来访问存储在ROM 520、RAM 525、和/或一个或多个存储装置530中的数据以供处理器510进行高速访问。在一些示例中,缓存512可以提供性能提升,以避免处理器510从存储器515、ROM 520、RAM 525、和/或该一个或多个存储装置530访问之前存储在缓存512中的数据时的延迟。在一些示例中,该一个或多个存储装置530存储一个或多个软件模块(例如,软件模块532、534、536、和/或类似物)。软件模块532、534和/或536可以控制和/或被配置用于控制处理器510执行各种动作、比如方法200和/或300的过程。并且虽然示出系统500仅具有一个处理器510,但是应理解的是,处理器510可以代表一个或多个中央处理器(CPU)、多核处理器、微处理器、微控制器、数字信号处理器(DSP)、现场可编程门阵列(FPGA)、专用集成电路(ASIC)、图形处理单元(GPU)、张量处理单元(TPU)和/或类似物。在一些示例中,系统500可以被实施为独立式子系统、和/或实施为添加至计算装置的板、或实施为虚拟机。
为了使得用户能够与系统500交互,系统500包括一个或多个通信接口540和/或一个或多个输入/输出(I/O)装置545。在一些示例中,该一个或多个通信接口540可以包括一个或多个网络接口、网络接口卡、和/或类似物,以根据一个或多个网络和/或通信总线标准来提供通信。在一些示例中,该一个或多个通信接口540可以包括用于经由网络、比如网络115来与系统500通信的接口。在一些示例中,该一个或多个I/O装置545可以包括一个或多个用户接口装置(例如,键盘、指向/选择装置(例如,鼠标、触摸板、滚轮、轨迹球、触摸屏和/或类似物)、音频装置(例如,麦克风和/或扬声器)、传感器、致动器、显示装置、和/或类似物)。
该一个或多个存储装置530中的每一个可以包括比如由硬盘、光学介质、固态驱动器和/或类似物提供的非暂态、非易失性存储器。在一些示例中,该一个或多个存储装置530中的每一个可以与系统500(例如,本地存储装置)位于同一地点、和/或远离系统500(例如,云存储装置)。
图5B展示了基于芯片组架构的计算系统550,所述芯片组架构可以用于执行本文描述的任一种方法(例如,方法200和/或300)。系统550可以包括处理器555,其代表能够执行软件、固件和/或其他计算的任何数量的物理和/或逻辑上不同的资源,比如一个或多个CPU、多核处理器、微处理器、微控制器、DSP、FPGA、ASIC、GPU、TPU和/或类似物。如图所示,处理器555由一个或多个芯片组560辅助,所述芯片组还可以包括一个或多个CPU、多核处理器、微处理器、微控制器、DSP、FPGA、ASIC、GPU、TPU、协处理器、编码器-解码器(CODEC)、和/或类似物。如图所示,该一个或多个芯片组560将处理器555与一个或多个I/O装置565、一个或多个存储装置570、存储器575、桥接器580、和/或一个或多个通信接口590中的一者或多者对接。在一些示例中,该一个或多个I/O装置565、一个或多个存储装置570、存储器、和/或一个或多个通信接口590可以对应于图5A和系统500中类似命名的对应物。
在一些示例中,桥接器580可以提供额外的接口,用于向系统550提供对一个或多个用户接口(UI)部件、比如一个或多个键盘、指向/选择装置(例如,鼠标、触摸板、滚轮、跟踪球、触摸屏和/或类似物)、音频装置(例如,麦克风和/或扬声器)、显示装置、和/或类似物的访问。
根据一些实施例,系统500和/或560可以提供图形用户接口(GUI),其适合于辅助用户(例如,外科医生和/或其他医务人员)执行方法200和/或300的过程。GUI可以包括关于要执行的下一动作的指令,带注释和/或无注释的解剖学结构图、比如眼睛的术前和/或术后图像(例如,比如图4描绘的),输入请求,和/或类似物。在一些示例中,GUI可以显示解剖学结构和/或类似物的真彩色图像和/或假彩色图像。
图6是根据一些实施例的多层神经网络600的图。在一些实施例中,神经网络600可以代表用于实施关于过程230、240、250和/或290描述的并且被预测引擎120使用的一个或多个预测模型中的每个预测模型的神经网络。神经网络600使用输入层620来处理输入数据610。在一些示例中,输入数据610可以对应于在过程230期间提供给该一个或多个预测模型的输入数据和/或在用于训练一个或多个预测模型的过程290期间的更新期间提供给一个或多个预测模型的训练数据。输入层620包括用于通过缩放、范围限制、和/或类似方式来调节输入数据610的多个神经元。输入层620中的每个神经元生成被馈送至隐藏层631的输入端的输出。隐藏层631包括处理来自输入层620的输出的多个神经元。在一些示例中,隐藏层631中的每个神经元生成输出,所述输出接着被传播经过一个或多个额外的隐藏层(以隐藏层639结束)。隐藏层639包括处理来自前一个隐藏层的输出的多个神经元。隐藏层639的输出被馈送至输出层640。输出层640包括用于通过缩放、范围限制、和/或类似方式来调节来自隐藏层639的输出的一个或多个神经元。应理解的是,神经网络600的架构仅是代表性的,并且其他架构是可能的,包括具有仅一个隐藏层的神经网络、没有输入层和/或输出层的神经网络、具有递归层的神经网络、和/或类似物。
在一些示例中,输入层620、隐藏层631-639、和/或输出层640中的每一者包括一个或多个神经元。在一些示例中,输入层620、隐藏层631-639、和/或输出层640中的每一者可以包括相同数量或不同数量的神经元。在一些示例中,每个神经元将其输入x进行组合(例如,使用可训练加权矩阵W获得的加权和)、加上可选的可训练乖离率b、并且应用激活函数f来生成输出a,如等式3所示。在一些示例中,激活函数f可以是线性激活函数、具有上限和/或下限的激活函数、对数s形(log-sigmoid)函数、双曲正切函数、修正线性单元函数、和/或类似物。在一些示例中,每个神经元可以具有相同或不同的激活函数。
a=f(Wx+b) 等式3
在一些示例中,可以使用监督学习(例如,在过程290期间)来训练神经网络600,其中训练数据的组合包括输入数据和标准真值(ground truth)(例如,预期的)输出数据的组合。神经网络600的使用该输入数据作为输入数据610而生成的输出之间的差异,并将如由神经网络600生成的输出数据650与标准真值输出数据进行比较。然后可以将所生成的输出数据650与标准真值输出数据之间的差异反馈到神经网络600中,以对各个可训练的权重和乖离率进行校正。在一些示例中,可以使用使用随机梯度下降算法的反向传播技术和/或类似物来反馈所述差异。在一些示例中,可以将一大组的训练数据组合多次呈现给神经网络600,直到总损失函数(例如,基于每个训练组合的差异的均方误差)收敛到可接受的水平为止。
根据上述实施例的方法可以实施为存储在非暂态有形机器可读介质上的可执行指令。所述可执行指令在被一个或多个处理器(例如,处理器510和/或处理555)运行时可以致使该一个或多个处理器执行方法200和/或300的过程中的一个或多个过程。可以包括方法200和/或300的过程的一些常见形式的机器可读介质是例如软磁盘、软盘、硬盘、磁带、任何其他磁性介质、CD-ROM、任何其他光学介质、打孔卡、纸带、任何其他带有孔图案的物理介质、RAM、PROM、EPROM、FLASH-EPROM、任何其他存储芯片或盒、和/或处理器或计算机适合从中读取的任何其他介质。
实施根据这些披露内容的方法的装置可以包括硬件、固件和/或软件,并且可以采用多种形状因子中的任一种。这样的形状因子的典型示例包括膝上型计算机、智能电话、小型个人计算机、个人数字助理和/或类似物。本文描述的功能的一部分也可以体现在外围设备和/或附加卡中。通过进一步示例,此类功能还可以在单一装置中的不同芯片或在其中执行的不同过程之间、在电路板上实现。
虽然已经示出和描述了展示性实施例,但是在前述披露中设想了各种各样的修改、改变和替换,并且在一些情况下,可以采用实施例的一些特征而不相应地使用其他特征。本领域普通技术人员应认识到许多变化、替代方案和修改。因此,本发明的范围应仅由权利要求来限制,并且应了解的是,应以与本文披露的实施例的范围一致的方式广义地解释权利要求。
- 用于眼内透镜选择的系统和方法
- 具有衍射光栅结构的人工眼内透镜以及用于制造人工眼内透镜的方法