一种编带设备交手校正系统及方法
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及芯片封装技术领域,尤其涉及一种编带设备交手校正系统及方法。
背景技术
随着技术封装技术发展,要求封装芯片尺寸越来越小,对于改机时间、精度要求越来高。设备自带校准交手位置和调节位置方式,不能满足操作人员使用,存在以下问题:
1、请参阅图1和图2所示,校准编带机捡拾头16(Flip Head)和放置头6(BondHead)交接位置,需要从X、Y方向,将Flip和Bond吸嘴161对正,实现精准的交接,相机3只能直接显示Y方向的对接位置,X方向需要安装单三棱镜17,且调整相机3位置,但会影响对FlipHead和BondHead的高度测量;
2、BondHead仅由两颗螺丝4固定,调节时松开固定螺丝,通过敲击移动,无法精确调节BondHead位置;
3、由于有4个FlipHead和16个BondHead,调试数量较多,效率和效果不理想。
发明内容
本发明的目的在于提供一种编带设备交手校正系统及方法,以提升MI编带设备交手校正效率。
为了实现上述目的,本发明采用如下技术方案:
一种编带设备交手校正系统,包括:底座、固定座、相机、校准块、放置头和捡拾头;
放置头设置于捡拾头上方;
放置头固定在固定座上;固定座安装在底座上;
相机设置于放置头和捡拾头之间交接位置的X方向;
校准块,用于在X方向观测放置头和捡拾头之间交接位置的Y方向。
本发明进一步的改进在于:固定座通过固定螺钉固定在底座的凹槽中。
本发明进一步的改进在于:凹槽的尺寸大于固定座的尺寸,固定座能够在凹槽中调整位置。
本发明进一步的改进在于:底座的X方向螺纹安装有X方向顶丝,Y方向螺纹安装有Y方向顶丝;X方向顶丝和Y方向顶丝的端部分别顶在固定座的X方向侧面和Y方向側面。
本发明进一步的改进在于:X方向和Y方向为三轴坐标系中相互垂直的两个方向。
本发明进一步的改进在于:X方向和Y方向为均垂直于竖直方向的两个方向,且X方向和Y方向相互垂直。
本发明进一步的改进在于:校准块为潜望镜结构。
本发明进一步的改进在于:校准块上设有金属片;校准块通过磁铁吸附在捡拾头上;校准块的入光口正对放置头和捡拾头之间的交接位置;校准块的出光口位于X方向。
本发明进一步的改进在于:固定座通过两个位于放置头两侧的固定螺钉安装在底座上。
一种编带设备交手校正方法,包括:松开固定座,调节X方向顶丝、Y方向顶丝,通过相机观察X方向放置头和捡拾头是否对齐、通过校准块观察Y方向放置头和捡拾头是否对齐,X方向和Y方向对齐后,固定固定座,完成交手校正。
与现有技术相比,本发明的有益效果是:
1)、本发明在使用时,可以使用相机直接观察交接位置的X方向,交接位置安装校准块,无需调整相机位置,使用新型校准块直接观察Y方向。
2)、本发明在使用时,调节X方向顶丝、Y方向顶丝,通过相机观察X方向放置头和捡拾头是否对齐、通过校准块观察Y方向放置头和捡拾头是否对齐,X方向和Y方向对齐后,锁紧两颗固定螺钉,完成放置头和捡拾头的交手校正;本发明中,使用者可以在同一方向直接观察X方向和Y方向校正情况,同时通过顶丝的设置可以精确的调整放置头的位置,能够实现快速、准确的校准。
3)、本发明在使用时,通过安装矫正方法,可以更加高效、精准的调节BondHead的位置,而且不需要特别多的调试矫正步骤,定位的效率更高,定位的效果更好。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为捡拾头和放置头的位置示意图;
图2为传统校正方法的示意图;
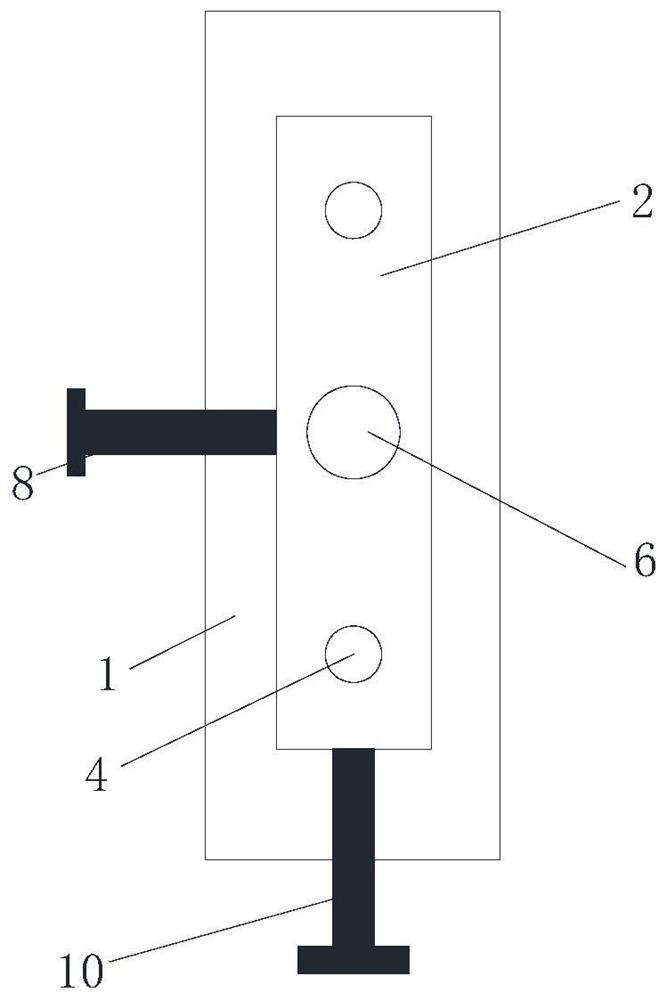
图3为本发明一种编带设备交手校正系统的俯视图;
图4为本发明一种编带设备交手校正系统的仰视图。
图中:1、底座;2、固定座;3、相机;4、固定螺钉;5、校准块;6、放置头;8、X方向顶丝;10、Y方向顶丝;16、捡拾头;161、吸嘴;17;三棱镜;18、磁铁。
具体实施方式
下面将参考附图并结合实施例来详细说明本发明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
以下详细说明均是示例性的说明,旨在对本发明提供进一步的详细说明。除非另有指明,本发明所采用的所有技术术语与本申请所属领域的一般技术人员的通常理解的含义相同。本发明所使用的术语仅是为了描述具体实施方式,而并非意图限制根据本发明的示例性实施方式。
编带设备工作时,通过Flip Head从蓝膜上捡拾芯片,翻转180°后将芯片交接给Bond Head,Bond Head从Flip Head接收到芯片后,放置在载带内。
请参阅图3至图4所示,本发明一种编带设备交手校正系统,包括:底座1、固定座2、相机3、校准块5、放置头6和捡拾头16;
放置头6设置于捡拾头16上方;放置头6固定在固定座2上,固定座2通过两个固定螺钉4固定在底座1的凹槽中。凹槽的尺寸大于固定座2的尺寸,使得固定座可以在凹槽中适当的调整位置。
底座1的X方向螺纹安装有X方向顶丝8,Y方向螺纹安装有Y方向顶丝10;X方向顶丝8和Y方向顶丝10的端部分别顶在固定座2的X方向侧面和Y方向側面。松开固定螺钉4,通过拧动X方向顶丝8和Y方向顶丝10,可以调整固定座2的位置,进而调整放置头6的位置。X方向和Y方向为三轴坐标系中相互垂直的两个方向;优选的,X方向和Y方向为均垂直于竖直方向的两个方向,且X方向和Y方向相互垂直。
校准块5为潜望镜结构;其上设有金属片;使用时,校准块5通过磁铁18吸附在捡拾头16上,使得校准块5的入光口正对放置头6和捡拾头16之间的交接位置的Y方向;校准块5的出光口位于X方向;相机3也固定在正对交接位置的X方向;如此设置,无需调整相机3位置,使用校准块5直接观察Y方向。使用者,站在X方向通过观测相机3和校准块5就能够同时观测到X方向和Y方向。
本发明一种编带设备交手校正方法,包括以下步骤:
松开两颗固定螺钉4,调节X方向顶丝8、Y方向顶丝10,通过相机3观察X方向放置头6和捡拾头16是否对齐、通过校准块5观察Y方向放置头6和捡拾头16是否对齐,X方向和Y方向对齐后,锁紧两颗固定螺钉4,完成放置头6和捡拾头16的交手校正;本发明中,使用者可以在同一方向直接观察X方向和Y方向校正情况,同时通过顶丝的设置可以精确的调整放置头的位置,能够实现快速、准确的校准。
由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
- 一种编带设备交手校正系统及方法
- 一种自动编带和背胶设备、载带以及编带方法