行驶车道的走向的确定
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及行驶道路的行驶车道的走向的确定。本发明尤其是涉及行驶车道在两个行驶道路的交叉区域中的走向的确定。
背景技术
机动车可以自动化地沿纵向方向和/或横向方向被控制。为此,一方面可以使用从机动车的周围环境中扫描的数据,另一方面所述控制可以基于高精度的地理地图的数据。这样的地图的构建非常耗费,因为为此必须以高的精度和足够的频率测量大量的道路区段。
DE 10 2013 208 521 A1提出,基于对车辆车队的监测来确定高精度的地图。
如果已经在机动车车载上构建的测量数据未经处理地在中央单元上收集,则为此可能需要过于大的带宽。如果所述数据另一方面在本地在机动车侧进行预处理,则为此通常可以仅使用有限的处理资源。存在所述数据由于处理而被污染或丢失细节的危险。尤其是在难以绘制地图的区域、例如两个道路的交叉口的区域中,基于车队的地图绘制可能是困难的。
发明内容
本发明所基于的任务在于,给出一种改善的用于集体地图绘制的技术,其优选在使用机动车和中央单元之间的小的传输带宽的同时允许高的现实性和精度。
具有行驶车道的行驶道路包括无分岔的第一区段和第二区段以及包括第三区段,所述第三区段处于第一区段和第二区段之间,并且在所述第三区段的区域中所述行驶道路与另一行驶道路形成同一平面(niveaugleiche)的交通节点。
按照本发明的第一方面,用于确定行驶车道的走向的方法包括如下步骤:确定多个机动车在行驶车道上在第一和/或第二区段的区域中的行驶轨迹;基于所述行驶轨迹确定行驶车道在第一区段和第二区段的区域中的走向;基于所确定的在第一区段和第二区段上的走向确定机动车在第三区段的区域中的可能的行驶轨迹;以及,确定行驶车道在第三区段的区域中的走向。
同一平面的交通节点尤其是可以构成为汇合处、拐弯、交叉口、驶入口或驶出口。行驶车道的走向可以通过其尤其是在交通节点的区域中划分成三个区段而改善地确定。
行驶轨迹尤其是可以基于一系列的绝对定位和里程计来确定。所述绝对定位尤其是可以借助基于卫星的导航系统的接收机来确定。然而,其他确定类型也是可能的,例如借助地面标志的光学检测和三角测量。所述里程计尤其是可以确定由机动车经过的路程并且例如借助基于机动车车轮的车轮转速工作。里程计信息也可以基于其他传感器确定。例如,机动车的旋转或平移可以借助加速度传感器或转速传感器确定。机动车在方向和/或速度方面的运动也可以基于无接触的传感器如相机、雷达传感器、激光雷达传感器或超声传感器来确定。所述传感器优选是成像式的并且可以进一步优选是光学的,其方式为所述传感器实施基于光或基于无线电波的扫描。所述确定可以基于光流进行。这样的方法也称为“视觉里程计”。
一般地,里程计信息是相对参量,所述相对参量涉及机动车的当前的或过去的位置并且优选可以包括方向分量、距离分量和/或速度分量。
在另一种实施形式中,确定在第一或第二区段的区域中的至少一个点地面标志的位置,其中关于所确定的点地面标志确定在第三区段的区域中的行驶轨迹。所述地面标志例如可以包括行驶车道边界、指路牌或在机动车的周围环境中的其他可检测的物体,所述物体的位置在机动车车载上是已知的,例如因为所述物体的位置在道路图中被注明。机动车的位置的确定和在周围环境中的物体的扫描可以相互集成地实施,例如借助SLAM算法(即时定位与地图构建,Simultaneous Localization and Mapping)。
所述点地面标志可以包括处于行驶车道旁的物体,例如求援电话柱、路牌或指示牌或行车道标记。尤其是如果所述物体对于在行驶车道上的交通是相关的,所述物体可以是可良好地检测以及识别的并且其位置可以是足够准确已知的。
行驶道路可以包括沿相同的方向的多个行驶车道。基于来自第一区段和第二区段的连接信息能够以改善的精度区分车道变换与机动车离开或进入行驶车道。如果行驶道路包括两个行驶车道,所述两个行驶车道的右车道边界彼此对应并且所述两个行驶车道的左车道边界彼此对应,则机动车所处的行驶车道的确定不能基于被监测的车道进行。这样的情形例如在四个或更多车道时存在,在所述车道之间允许车道变换;在这里可以有两个或更多车道处于中心,所述两个或更多车道在两侧用虚线限定。
如果在相邻的车道之间的变换可以足够可靠地识别,则可以确定由机动车之一行驶的行驶车道,其方式为确定初始行驶车道配属;亦即机动车在进入一个区段中时所处的行驶车道,并且此后基于初始行驶车道和行驶车道的变换顺序来确定行驶的车道。换句话说,可以确定初始行驶车道,机动车之一在进入无分岔的区段之一中时处于所述初始行驶车道上,并且可以基于由机动车行驶的行驶车道的变换来确定行驶车道的走向。在两次车道变换之间区段的走向可以基于机动车的轨迹和所利用的行驶车道来确定。
为此可以确定机动车在行驶道路的相邻行驶车道之间变换的顺序。机动车在进入无分岔的区段之一中时处于行驶车道之一上的可能性可以基于所述顺序来确定。所述顺序和行驶车道的已知布置之间的一致程度可以由此得以考察。例如一个行驶道路可以包括三个行驶车道。如果确定了向左的两次车道变换,则最右边的车道可以被确定为初始行驶车道。当机动车依次向右实施两次行驶车道变换,尽管在初始车道的右边仅还存在一个车道,初始行驶车道配属例如也可以被确定为不可信。类似地,当车辆在向右的第一次行驶车道变换之后在其右侧监测到虚线,则该初始配属也不可信。
当机动车在行驶道路上的行驶轨迹接近要基于假定的行驶车道预估的走向时,可以确定在机动车进入无分岔的区段中之一时在假定的初始行驶车道上行驶的高可能性。所述走向可以二维或三维地确定。
要预估的走向可以通过如下方式确定:首先确定多个机动车通过行驶道路的预先确定的道路横截面的轨迹的交点(Durchstoβpunkte),然后基于所述交点确定在相邻的行驶车道之间的界限并且最后基于所述界限确定要预估的走向(“spatial prior fit”)。
机动车在进入无分岔的区段之一中时处于行驶车道之一上的可能性可以基于轨迹与所确定的界限的距离来确定。
可以基于由多个机动车监测的在各行驶车道之间的车道边界来确定行驶道路的一定数量的行驶车道(“覆盖范围(coverage)”)。在此,一个行驶车道可以认为不存在,如果该行驶车道的行驶车道标记由少于所有机动车中特定份额的机动车在驶过相应的路程区段时监测到。
在另一种实施形式中,确定在第三区段的区域中变换行驶车道的许可并且基于所确定的许可来确定可能的行驶轨迹。如果在交通节点的区域中例如存在超车禁令,则在该区域中检测到的机动车车道变换可以被认为是不允许的机动动作并且总体上放弃所配属的轨迹。
行驶车道的确定的各走向可以在彼此邻接的区段上连接成一个总走向。由此能够从行驶车道的多个单独的区段生成实际上任意大的道路地图。所述道路地图可以关于行驶车道的走向具有高精度。道路地图可以用其他的信息、尤其是用较不准确的道路地图的信息加强,所述较不准确的道路地图例如可以只用于导航、但不用于高精度的应用,如机动车的纵向和/或横向动力学的自动控制。不准确的地图因此能够转变为高精度的地图。随着不同机动车的轨迹的尤其是当前的监测的数量上升,道路地图的精度和/或可靠性能够得到提升。专用测量车辆的使用或其他信息源如卫星图像的分析可以不是必要的。
在总走向和假定的走向之间可以确定区别并且基于所述区别确定对假定的走向的修正。
按照第二方面,一种设备包括:用于接收多个机动车的所确定的行驶轨迹的通信装置,其中,所述行驶轨迹分别在行驶道路的第一和/或第二区段上延伸;以及处理装置。所述处理装置设计用于,基于所述行驶轨迹确定行驶车道在第一区段和第二区段的区域中的走向并且基于所确定的在第一区段和第二区段上的走向确定机动车在第三区段的区域中的可能的行驶轨迹。
所述处理装置可以设计用于,完全或部分地实施在这里描述的方法。为此,所述处理装置可以包括可编程的微机或微控制器并且所述方法可以以具有程序代码模块的计算机程序产品的形式存在。所述计算机程序产品也可以存储在计算机可读的数据载体上。所述方法的特征或优点可以转用到所述设备上或反之。
附图说明
现在参考附图更准确地描述本发明,其中:
图1示出一种系统;
图2示出一种方法的流程图;以及
图3示出两个行驶道路的示例性交叉口。
具体实施方式
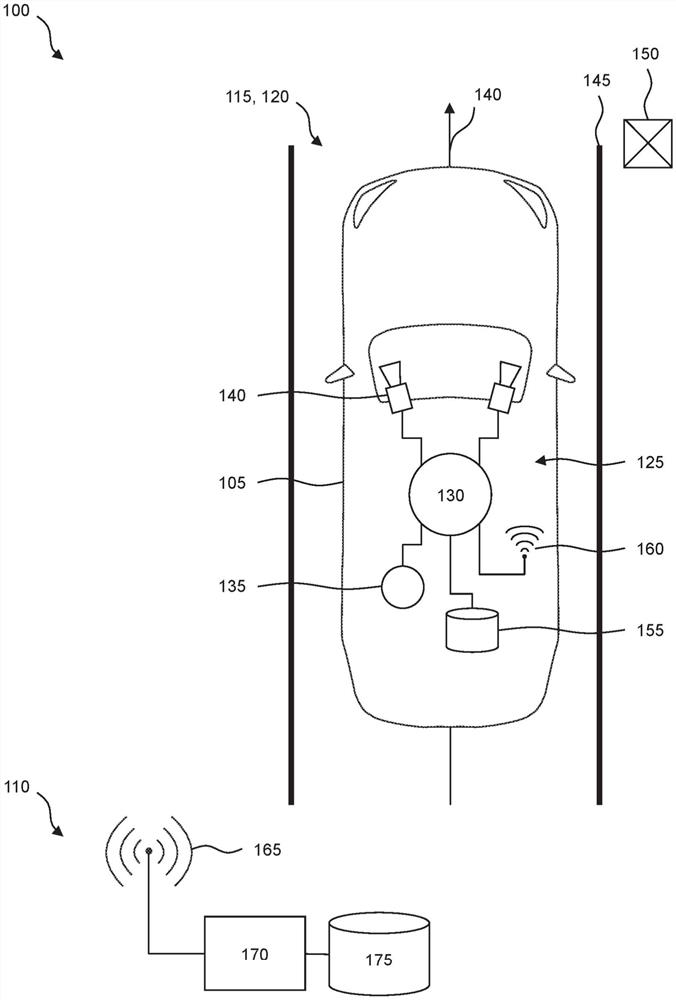
图1示出具有机动车105和中央单元110的系统100。行驶道路115包括行驶车道120,机动车105可以在所述行驶车道上运动。机动车105包括设备125,所述设备包括处理装置130和定位装置135。
定位装置135设计用于确定机动车105的绝对位置。基于一系列确定的位置,所述处理装置130可以确定机动车105的行驶轨迹140。行驶轨迹140的确定可以附加地借助视觉里程计来确定。为此,机动车105的周围环境可以借助一个或多个优选无接触的传感器142扫描。传感器142尤其是可以包括光学的传感器、如相机,但也可以例如设置雷达传感器、激光雷达传感器或超声传感器。基于所述扫描,可以确定在机动车105的区域中行驶车道120的行驶车道边界145。此外可以确定地面标志150,所述地面标志通常不应当被驶过并且可以处于行驶道路115旁或之上。地面标志150例如可以包括交通信号灯、交通指示牌或路标。地面标志150的设置位置可以是已知的或未知的。
为了确定行驶轨迹140可以监测,当机动车105行驶时,地面标志150怎样运动通过传感器142的扫描区域。机动车105相对于地面标志150并且因此相对于行驶道路115的相对运动可以从所述监测确定。当已知地面标志150的预先确定的位置时,所述确定能够改善地实施。也许可以在所述监测的范畴内也确定地面标志150的被监测的位置与所述预先确定的位置的偏差。所述预先确定的位置例如可以保存在数据存储器155中。在那里保存的数据尤其是可以包括地图数据,所述地图数据也可以包括行驶道路115或行驶车道120的预先确定的走向。
此外,行驶轨迹140可以基于机动车105车载的传感器或系统的其他监测来确定。这样的传感器例如可以包括在机动车105的车轮上的转速传感器。优选地,所述设备125此外包括通信装置160,所述通信装置尤其是可以设计用于无线通信。为了通信可以使用无线网络、如移动无线电网络。
中央单元110可以实现为服务器或例如也可以实现为云中服务。中央单元110包括通信装置165、处理装置170和数据存储器175。通信装置160和165优选设计用于相互通信,其中,一部分传输也可以有线连接地进行。中央单元110设计用于接收并且处理多个机动车105的行驶信息。优选地,中央单元110此外设计用于确定由机动车105行驶的行驶车道120的走向。此外可以确定所确定的走向是否偏离于预先确定的走向,所述预先确定的走向在以上提到的地图数据中给出。在该情况下可以确定对所述预先确定的走向的修正。在一种实施形式中,可以基于机动车105的多种信息确定关于地面标志150的位置、存在或类型的类似修正。
图2示出一种方法200的流程图,所述方法尤其是可以基于如图1的系统100实施。在第一步骤205中,可以确定机动车105的行驶轨迹140。所述确定可以基于绝对定位、尤其是借助定位装置135的绝对定位或基于相对位置、例如以里程计(测程法)的确定的形式进行。此外在步骤210中可以确定机动车105所处的行驶道路115是否是无分岔的。
在步骤210中可以确定,所确定的行驶轨迹140处于行驶的行驶道路115的无分岔的区段上。该步骤可以以不同的实施形式在确定行驶轨迹140之前、期间或之后确定。为了确定无分岔,尤其是可以使用机动车105车载的测程法传感机构。关于要监测的汇合的或分岔的行驶道路的信息可以从地图数据中采集。
在步骤215中将所确定的行驶轨迹140传输到中央单元110上。中央单元110设计用于接收在行驶道路115上行驶的机动车105的多个行驶轨迹140。如果接收到的行驶轨迹140延伸超过行驶道路115的无分岔的区域,则也可以在中央单元110侧将行驶轨迹140相应地分流(Beschneidung)到无分岔的区域上。
在步骤220中,在中央单元110侧可以关于多个接收到的行驶轨迹140确定在行驶道路115的无分岔的区段上与此对应的行驶车道120。行驶车道120的由机动车105行驶的区段可以基于在无分岔的区段上被监测到的行驶车道变换来确定。行驶车道变换备选地可以在机动车105侧或在远离的单位110侧确定。相应的确定可以关于行驶道路115的另一区段实施,其中,两个区段处于存在分岔的其他区段的不同侧上。
在步骤225中,可以确定机动车105在分岔区域中的多个可能的行驶轨迹140中的很可能的或最可能的行驶轨迹。在此基础上,可以在步骤230中确定行驶车道120在分岔区域中的走向。
在步骤235中,行驶车道120在行驶道路115的各区段上的走向可以合并成一个上级的走向。在此,所确定的走向尤其是可以与其他数据合并,所述其他数据例如可以从相关地区的地理地图中获得。基于所确定的走向,可以为现有的地理地图确定变化、所谓的补丁。现有的地图可以是精度在一米或多米范围内的对于导航可使用的常见地图或者是精度在一厘米或数厘米范围内的高精度(High Definition、HD)地图。
为了确定用于存在的地理地图的补丁,可以应用进一步的SLAM优化,以便计算更新的几何结构。所述优化尤其是尝试使存在的数据这样彼此协调一致,使得偏差或误差最小化。在此必须确保,新确定的车道标记无问题地与已经在地图中存在的车道标记结合。针对车道标记沿纵向方向的每个起点和每个终点可以确定严格(harter)的要素,所述要素强制使得相应点的方位准确处于其在地图内所处的位置。这样的严格的要素也可以称为强制条件并且在优化时保持不变。最后,结果可以转换为数字地图的数据结构。
行驶车道标记的走向的确定可以借助称为“空间先验拟合(Spatial Prior Fit)”(先验的空间适配)的措施进行。空间先验代表关于车道标记相对于行驶车道120中心线的带符号的正交距离的假定。对于每个中心线部段可以确定,其方式为将所监测的车道标记的带符号的横向距离进行分组,所述车道标记与该部段相关联,或具有相同的车道标记配置并且最多远五个中心线步长的部段。在一种实施形式中使用期望最大化聚类,其具有数量与在所述部段的车道标记配置中的车道标记相同的簇。所产生的簇可以按照侧向距离分类并且设有车道标记编号。
因此,对于每个遍历的和假定的初始车道配置,可以计算每个车道标记监测和相应的空间先验之间的距离d。通过应用函数
最后可以在步骤240中确定修正,以便使行驶车道120的假定走向接近所确定的走向。所述修正例如可以以到一个或多个机动车105上的地图更新的形式提供。所述提供尤其是可以借助通信装置160、165进行。
图3示出示例性的行驶道路115与另一行驶道路305的交叉口300。在此,为了较好的示出,仅考虑沿一个行驶方向(在图中从下向上)的行驶车道115。行驶道路115示例性地包括两个平行的行驶车道120。在示出的区域中,行驶道路315在第一区段310、第二区段315和处于第一区段和第二区段之间的第三区段320上延伸。区段310和315是无分岔的并且在第三区段320的区域中潜在存在机动车105在行驶道路115和所述另一行驶道路305之间变换的机会。
在图3中在第三区段320的区域中示出的分别表征行驶车道120的横向边界的地面标记(也称为:车道标记或行驶车道标记)是纯示例性的并且不必然是完整的。通常,通过环境传感机构142的扫描不在虚线的和实线的地面标记之间区分,所述环境传感机构设计用于识别地面标记,例如借助相机或激光雷达传感器来识别。在交叉口300的区域中的其他标记如停车线、人行横道或横跨的自行车道的边界线亦或用于将行驶方向分配给行驶车道120的方向箭头一般不分析。通过所提出的对在行驶道路115的无分岔的与交叉口、驶入口或驶出口邻接的区段上的行驶车道120的确定,能够改善地基于统计学的监测确定行驶道路115的处于所述区段之间的走向。
附图标记列表
100 系统
105 机动车
110 中央单元
115 行驶道路
120 行驶车道
125 设备
130 处理装置
135 定位装置
142 传感器
145 行车道边界
150 地面标志
155 数据存储器
160 通信装置
165 通信装置
170 处理装置
175 数据存储器
200 方法
205 确定行驶轨迹
210 行驶道路是无分岔的?
215 传输行驶轨迹
220 确定行驶车道的走向
225 确定在中间区域中的可能的行驶轨迹
230 确定行驶车道在中间区域中的走向
235 使各走向合并成一个总走向
240 确定修正
300 交叉口
305 另一行驶道路
310 第一区段
315 第二区段
320 第三区段
- 行驶车道的走向的确定
- 用于确定车辆的行车道的行车道走向的方法和设备