多回路液压缸体助力机构
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及汽车领域,特别涉及一种多回路液压缸体助力机构。
背景技术
随着新能源汽车和自动驾驶的日益普及,传统的真空助力刹车不能适用于电动车上,将会被逐步淘汰。电动行车制动器不仅能和新能源车完美匹配,将来还可能支持实现自动驾驶功能,所以电动行车制动器是发展的趋势。
电动行车制动助力器在车身稳定控制系统工作时,需将其所需的足够的制动液通过制动液管路提供出去。由于各种电磁阀在电动行车制动助力器中使用,电磁阀的孔径不足以满足车身稳定控制系统对制动液的流量要求,从而影响了车身稳定控制系统的功能和性能,对整车带来一定的安全隐患。
在现有技术中,电动行车制动助力器通常采用弹簧负载(模拟器)来模拟传统真空助力的刹车踏板感觉,现有市场上的产品模拟的踏板感觉会出现在大刚度弹簧起作用时踏板力突变的问题。并且在踏板快速回位时会发出强烈的撞击声。
有鉴于此,本领域技术人员改进了电动行车制动助力器的结构,以期克服上述技术问题。
发明内容
本发明要解决的技术问题是为了克服现有技术中电动行车制动助力器无法满足,且影响车身稳定控制系统的功能和性能的缺陷,提供一种多回路液压缸体助力机构。
本发明是通过下述技术方案来解决上述车身稳定控制系统对制动液的流量要求技术问题的:
一种多回路液压缸体助力机构,其特点在于,所述多回路液压缸助力机构包括:
储液罐和阀块,所述储液罐安装在所述阀块的顶部,所述阀块内设置有多个用于连接各个部件的油道;
串联双腔主缸,所述串联双腔主缸穿设在所述阀块内;
电机、控制器和制动压力源,所述电机和所述控制器分别安装在所述阀块的左右两侧且相互连接,所述控制器用于接收并输送信号至所述电机,所述制动压力源与所述电机连接,用于提供正常制动时的轮缸压力;
多个单向阀,所述单向阀压装在所述阀块上,且所述单向阀的上端紧邻所述储液罐的出口,侧端紧邻所述阀块内的油路出口;
多个分离阀,所述分离阀压装在所述阀块内对应的油道处;
多个隔断阀,所述隔断阀压装在所述阀块内对应的油道处;
当所述多回路液压缸体助力机构未动作,车身稳定控制系统主动工作时,制动液从所述储液罐分别经由所述分离阀、所述单向阀进入制动回路,将制动液提供给车身稳定控制系统。
根据本发明的一个实施例,所述单向阀包括阀座、阀芯和阀弹簧,所述阀块内设置有限位凸台,所述阀座铆压在所述阀块上,所述阀弹簧的下端部安装在所述阀块中,位于所述限位凸台的外圈,所述阀弹簧的上端部与所述阀芯的一端连接,所述阀芯的另一端安装在所述阀座内;
当所述阀芯向下移动时,所述限位凸台限制所述阀芯位移。
根据本发明的一个实施例,所述阀弹簧为锥形弹簧。
根据本发明的一个实施例,所述多回路液压缸体助力机构还包括模拟器,所述模拟器设置在所述阀块的底部。
根据本发明的一个实施例,所述模拟器包括活塞、末端橡胶、第一弹簧、顶杆、第一弹簧座、第二弹簧和端盖,所述顶杆的下端部安装在所述端盖上,所述第二弹簧套设在所述顶杆的下端部上,所述第一弹簧座套设在所述第二弹簧的外部,所述第一弹簧安装在所述第一弹簧座上;
所述活塞位于所述顶杆的上方,所述末端橡胶嵌设在所述活塞的下端部内,且与所述第一弹簧相抵。
根据本发明的一个实施例,所述模拟器中的所述活塞安装在所述阀块的模拟器腔内,所述模拟器腔包含前腔和后腔,所述后腔和所述阀块上油壶口之间设置回油油道。
根据本发明的一个实施例,所述模拟器还包括多个皮碗和多个过渡橡胶,所述皮碗设置在所述活塞的外周壁上,所述过渡橡胶嵌设在所述端盖的上表面,位于所述端盖和所述第一弹簧座之间。
根据本发明的一个实施例,所述串联双腔主缸包括推杆、缓冲弹簧和缓冲件,所述缓冲件安装在所述推杆上,所述缓冲弹簧安装在所述缓冲件内,其套设在所述推杆上。
根据本发明的一个实施例,所述串联双腔主缸还包括第一腔体和第二腔体,所述第一腔体和所述第二腔体分别和所述储液罐的出油口及分离阀相连通。
根据本发明的一个实施例,所述阀块上设置有第一液流入口和第二液流入口,所述第一液流入口和所述第二液流入口处设置有凹槽,所述制动压力源内的液流经由所述凹槽后流入所述第一液流入口和所述第二液流入口,再流入所述隔断阀中。
根据本发明的一个实施例,所述凹槽为月牙形槽。
根据本发明的一个实施例,所述制动压力源的丝杠固定在所述电机的空心轴上,所述丝杠上设置有丝杠缓冲机构,且所述丝杠缓冲机构位于所述丝杠和所述空心轴之间。
根据本发明的一个实施例,所述多回路液压缸体助力机构还包括插接件,所述插接件穿设在所述阀块内,且所述插接件的一端与所述电机插接,另一端与所述控制器插接。
根据本发明的一个实施例,所述插接件的两端分别安装有一橡胶环,且所述接插件为可分离式接插件。
本发明的积极进步效果在于:
本发明多回路液压缸体助力机构通过改进结构,使得助力机构未动作、车身稳定控制系统主动工作时,制动液从储液罐分别经由分离阀,单向阀进入制动回路,提供给车身稳定控制系统。单向阀及其布置方式可以满足车身稳定控制系统主动工作时对制动液流量的需求,并且满足两回路压差的要求。
所述多回路液压缸体助力机构的结构简单,操作方便,能够满足车身稳定控制系统对制动液的流量要求,提高用户的使用体验和安全性。
附图说明
本发明上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变的更加明显,在附图中相同的附图标记始终表示相同的特征,其中:
图1为本发明多回路液压缸体助力机构的立体图。
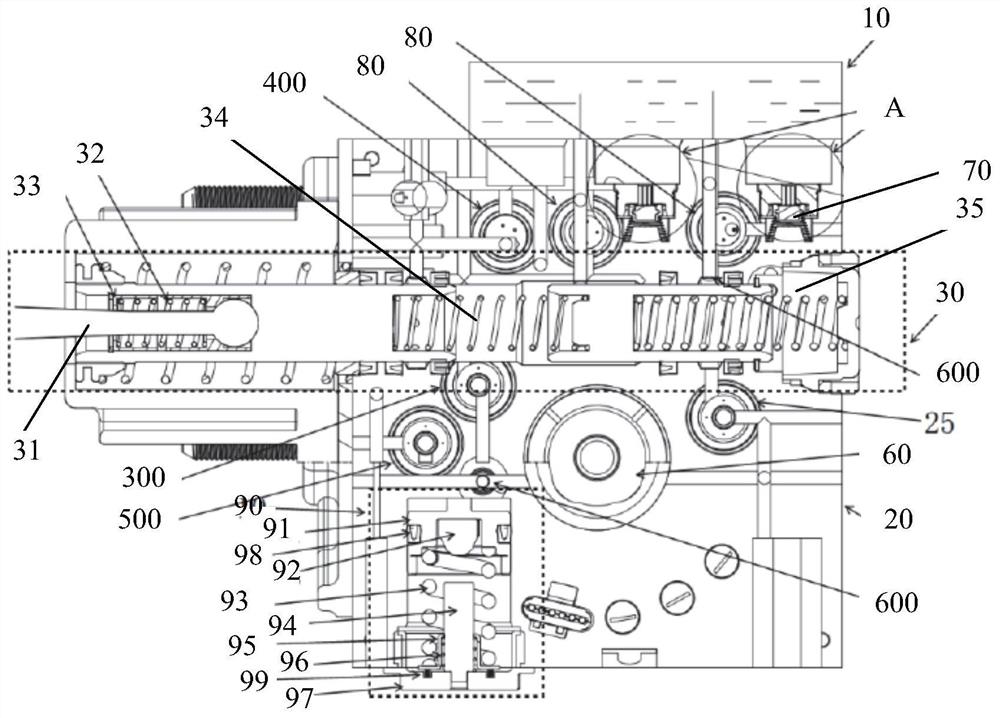
图2为本发明多回路液压缸体助力机构纵向剖开的剖视图。
图3为图2中A部分的放大示意图。
图4为本发明多回路液压缸体助力机构中模拟器的活塞布置示意图。
图5为本发明多回路液压缸体助力机构中制动压力源与电机连接工作的原理图。
图6为本发明多回路液压缸体助力机构中制动压力源与阀块之间的液体流向示意图。
图7为图6中B部分的放大立体图。
图8为本发明多回路液压缸体助力机构中电机与制动压力源的丝杠的安装示意图。
图9为本发明多回路液压缸体助力机构中电机和控制器的连接示意图。
【附图标记】
储液罐 10
阀块 20
串联双腔主缸 30
电机 40
控制器 50
制动压力源 60
单向阀 70
分离阀 80
阀座 71
阀芯 72
阀弹簧 73
限位凸台 74
储液罐的出口 11
油路出口 12
模拟器 90
活塞 91
末端橡胶 92
第一弹簧 93
顶杆 94
第一弹簧座 95
第二弹簧 96
端盖 97
皮碗 98
过渡橡胶 99
推杆 31
缓冲弹簧 32
缓冲件 33
第一腔体 34
第二腔体 35
模拟器腔 350
前腔 351
后腔 352
油壶口 21
回油油道 22
丝杠 61
泵壳体 62
泵壳体中的活塞 63
出口流道 64
第一液流入口 22
第二液流入口 23
凹槽 a
空心轴 41
丝杠缓冲机构 611
轴承 42
螺母 421
电机壳 43
电机后盖 44
O型圈 45
插接件 100
橡胶环 110
踏板接口法兰 200
隔断阀 300
诊断阀 400
模拟阀 500
压力传感器 600
具体实施方式
为让本发明的上述目的、特征和优点能更明显易懂,以下结合附图对本发明的具体实施方式作详细说明。
现在将详细参考附图描述本发明的实施例。现在将详细参考本发明的优选实施例,其示例在附图中示出。在任何可能的情况下,在所有附图中将使用相同的标记来表示相同或相似的部分。
此外,尽管本发明中所使用的术语是从公知公用的术语中选择的,但是本发明说明书中所提及的一些术语可能是申请人按他或她的判断来选择的,其详细含义在本文的描述的相关部分中说明。
此外,要求不仅仅通过所使用的实际术语,而是还要通过每个术语所蕴含的意义来理解本发明。
图1为本发明多回路液压缸体助力机构的立体图。图2为本发明多回路液压缸体助力机构纵向剖开的剖视图。图3为图2中A部分的放大示意图。
如图1至图3所示,本发明公开了一种多回路液压缸体助力机构,其包括:储液罐10、阀块20、串联双腔主缸30、电机40、控制器50、制动压力源60、多个单向阀70,多个分离阀80和隔断阀300。其中,储液罐10安装在阀块20的顶部,阀块20内设置有多个用于连接各个部件的油道。串联双腔主缸30穿设在阀块20内,电机40和控制器50分别安装在阀块20的左右两侧且相互连接,控制器50用于接收并输送信号至电机40,制动压力源60与电机40连接,用于提供正常制动时的轮缸压力。单向阀70压装在阀块20上,且单向阀70的上端紧邻储液罐10的出口,侧端紧邻阀块20内的油路出口。分离阀80和隔断阀300压装在阀块20内对应的油道处。此外,所述多回路液压缸体助力机构还包括多个线圈,将所述线圈安装固定在控制器50上。
当所述多回路液压缸体助力机构未动作,车身稳定控制系统主动工作时,制动液从储液罐10分别经由分离阀80、单向阀70进入制动回路,将制动液提供给车身稳定控制系统。
如图3所示,优选地,单向阀70包括阀座71、阀芯72和阀弹簧73,阀块20内设置有限位凸台74,所述阀座铆压在所述阀块上,将阀弹簧73的下端部安装在阀块20中,位于限位凸台74的外圈,阀弹簧73的上端部与阀芯72的一端连接,阀芯72的另一端安装在阀座71内。此处阀弹簧73可以优选为锥形弹簧。当阀芯72向下移动时,限位凸台74限制阀芯72的位移,从而控制阀芯72的位移大小。
进一步具体地说,单向阀70为一个组件结构,其安装在阀块20的油壶口处,阀座71铆压在阀块20上,阀芯72采用包胶结构,一端穿入阀座71心孔,一端和阀弹簧73小端内圈过盈相连,阀弹簧73大端外圈和阀块20上单向阀孔外圈过盈相连,阀弹簧73采用锥弹簧结构,稳定性较好。
车身稳定控制系统主动工作时,制动液从储液罐10分别经由分离阀80和单向阀70进入制动回路,提供给车身稳定控制系统,本机构的特征点在于单向阀70上端紧邻储液罐10的出口11,侧方紧邻油路出口12,这种布置方式使得制动液从储液罐10经单向阀70至油路出口12所经过的路径最短,压降最小。本实施例中设置两组单向阀70,其采取相同的布置方式,使得两个回路制动液路径相同,压降相同。单向阀70及其布置方式可满足车身稳定控制系统主动工作时对制动液流量的需求,并且满足两回路压差的要求。其中,单向阀70中的限位凸台74保证阀弹簧73不会被过度压缩,阀弹簧73采取锥形弹簧形式,保证了其稳定性。
进一步优选地,所述多回路液压缸体助力机构还包括模拟器90,将模拟器90设置在阀块20的底部。
如图2所示,模拟器90包括活塞91、末端橡胶92、第一弹簧93、顶杆94、第一弹簧座95、第二弹簧96和端盖97,顶杆94的下端部安装在端盖97上,第二弹簧96套设在顶杆94的下端部上,第一弹簧座95套设在第二弹簧96的外部,第一弹簧93安装在第一弹簧座95上。活塞91位于顶杆94的上方,末端橡胶92嵌设在活塞91的下端部内,且与第一弹簧93相抵。
更进一步地,模拟器90还包括皮碗98和过渡橡胶99,皮碗98设置在活塞91的外周壁上,过渡橡胶99嵌设在端盖97的上表面,位于端盖97和第一弹簧座95之间。
本实施例中,模拟器90的具体工作过程为:踩下踏板,串联双腔主缸30里的制动液被推出,经模拟阀500后进入模拟器90,由于皮碗98的密封作用,活塞91与皮碗98共同向下运动,压缩第二弹簧96,进而第一弹簧座95接触过渡橡胶99,过渡橡胶99被压缩,进而第一弹簧座95刚性接触端盖97,进而压缩第一弹簧93(在另一种情形下,由于力值的设置,第一弹簧93在此之前已经有一定压缩量),进而顶杆94接触末端橡胶92,末端橡胶92被压缩,直至限位。在此过程中,尤其是过渡橡胶99实现了第二弹簧96与第一弹簧93工作过渡阶段的踏板力平滑过渡。
优选地,串联双腔主缸30包括推杆31、缓冲弹簧32和缓冲件33,将缓冲件33安装在推杆31上,缓冲弹簧32安装在缓冲件33内,其套设在推杆31上。这种结构设置,使得串联双腔主缸30在工作过程中,尤其是缓冲弹簧32及缓冲件33可以有效的减缓踏板快速回位时的冲击,从而降低撞击声。
串联双腔主缸30还包括第一腔体34和第二腔体35,将第一腔体34和第二腔体35分别和储液罐10的出油口及分离阀80相连通。图4为本发明多回路液压缸体助力机构中模拟器的活塞布置示意图。
如图4所示,阀块20上的模拟器腔350包括前腔351和后腔352,阀块20的另一方设置有油壶口21,后腔352和油壶口21之间设置有回油油道22。
特别地,针对安装在阀块20上的模拟器90,在考虑到模拟器活塞皮碗98在密封失效后,制动液将会通过皮碗98泄露到后腔352,使得前腔351和后腔352充满制动液,驾驶员踩下踏板后,后腔352里的制动液不能排出,会导致踩不动踏板,影响到踏板感和带来相应的安全隐患,因此在阀块20内增加了回油油道22(如图4所示),后腔352中的制动液经过回油油道22后流入油壶口21。
图5为本发明多回路液压缸体助力机构中制动压力源与电机连接工作的原理图。图6为本发明多回路液压缸体助力机构中制动压力源与阀块之间的液体流向示意图。图7为图6中B部分的放大立体图。
如图5所示,对于制动压力源60,由电机40带动制动压力源60的丝杠61推动安装在泵壳体62中的活塞63,把制动液从泵壳体62上的出口流道64处推出。
如图6和图7所示,阀块20上设置有第一液流入口22和第二液流入口23,第一液流入口22和第二液流入口23处设置有凹槽a,制动压力源60内的液流经由凹槽a流入第一液流入口22和第二液流入口23,再流入隔断阀300。优选地,凹槽a可以设置为月牙形槽。
特别地,从泵壳体62上的出口流道64快速推出的制动液,需要进入阀块20(即HB1)的第一液流入口22和第二液流入口23,会产生压力冲击震荡,所以增加了月牙型结构的凹槽a。流经此处的制动液,在月牙形槽(即凹槽a)的导向作用下,平稳合流从第一液流入口22和第二液流入口23,再流入隔断阀300。
制动压力源60的泵壳体62上沿径向分布有多个出口流道64,当丝杠推动活塞前进时,制动压力源60内的制动液合流入凹槽a内,再流入第一液流入口22或第二液流入口23。
图8为本发明多回路液压缸体助力机构中电机与制动压力源的丝杠的安装示意图。
如图8所示,制动压力源60的丝杠61固定在电机40的空心轴41上,丝杠61上设置有丝杠缓冲机构611,且丝杠缓冲机构611位于丝杠61和空心轴41之间。
对于电机40和丝杠61的安装,在电机后端,空心轴41和轴承42内圈过盈配合,轴承42外圈间隙安装在电机壳43上,端面用卡簧锁紧。丝杠61通过螺母421固定在空心轴41上,电机后盖44过盈压装在电机壳43上,O型圈45用于密封。
特别地,此处结构中增加了丝杠缓冲结构611,由碟簧组合而成,在丝杠快速回位时,能够起到缓冲、减震和降噪的作用。
图9为本发明多回路液压缸体助力机构中电机和控制器的连接示意图。
如图9所示,所述多回路液压缸体助力机构还包括插接件100,插接件100穿设在阀块20内,且插接件100的一端与电机40插接,另一端与控制器50插接。进一步,在插接件100的两端分别安装有一橡胶环110。
在此处的结构中,由于电机40和控制器50布置在阀块20的两侧,电机信号线需要穿过阀块20接入控制器50(即ECU)中。因此本实施例中引入了一个两端接插的方式,方便快速,减少了传统的焊接步骤,并且在接插件pin的两端各增加一个橡胶环110,起到了消除间隙和缓冲的作用。
根据上述结构描述,本发明多回路液压缸体助力机构主要包括了储液罐10、电机40、控制器50、阀块20、模拟器90和踏板接口法兰200组成。电机40和控制器50位于阀块20两侧,有效地防止了元器件之间的电磁干扰,且控制器50接插件处空间满足要求,方便操作。特别地,踏板接口法兰200为可拆卸设计,可根据不同厂商的车型接口作更改。模拟器90为独立化模块,可根据不同厂商的不同车型对踏板感的要求,做相应的需求设计。
储液罐10可以选用螺钉固定在阀块20上,单向阀79中阀座71压装在阀块20上,制动压力源8主要用作提供正常制动时的轮缸压力。模拟器90为分离式独立设计。另外,分离阀80、隔断阀300、诊断阀400,模拟阀500按不同的油道布置点,分别压装在阀块20的各个油道处。两个压力传感器600设置在压力源出口和主缸二腔处,用于增加产品的安全特性。
本发明多回路液压缸体助力机构的可以在以下三种模式下工作:
模式一:正常助力模式,当驾驶员踩下制动踏板时,分离阀80关闭以阻断串联双腔主缸30与制动回路的连接,串联双腔主缸30排出的制动液经模拟阀500,进入模拟器90。同步地,控制器50通过踏板位移传感器检测到驾驶员的制动需求,协调电机提供助力,由制动压力源60提供制动液压力,经隔断阀300,进入制动回路,流入轮缸。
模式二:机械备份模式,当电源丧失或其它失效发生时进入此模式。当驾驶员踩下制动踏板时,模拟阀500关闭,隔断阀300关闭,串联双腔主缸30排出的制动液经由分离阀80进入制动回路,流入轮缸。
模式三:主动增压模式,例如自动驾驶。在接收到外部制动请求时,,分离阀80关闭以阻断串联双腔主缸30与制动回路的连接,制动液由制动压力源60提供,经由隔断阀300,进入制动回路,流入轮缸。
综上所述,本发明多回路液压缸体助力机构通过改进结构,使得助力机构未动作、车身稳定控制系统主动工作时,制动液从储液罐分别经由分离阀,单向阀进入制动回路,提供给车身稳定控制系统。单向阀及其布置方式可以满足车身稳定控制系统主动工作时对制动液流量的需求,并且满足两回路压差的要求。
所述多回路液压缸体助力机构的结构简单,操作方便,能够满足车身稳定控制系统对制动液的流量要求,提高安全性用户的使用体验。
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式作出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
- 多回路液压缸体助力机构
- 多回路液压缸体助力机构