一种智能化显微神经外科手术用显微镜
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及医疗器械技术领域,尤其是一种智能化显微神经外科手术用显微镜。
背景技术
60年代初手术显微镜引入神经外科, 因显微镜有良好的照明, 清晰度高,术野内病变组织和邻近结构放大,加上配合使用双极电凝器、显微手术器械、激光刀、超声吸引等,使手术精确度和准确性更好,损伤邻近重要结构的机会减少,手术治疗效果显著提高,手术并发症和手术死、残率明显降低。由于显微神经外科手术具有上述优越性,很快受到神经外科医生重视,神经外科手术由肉眼下、眼镜式放大镜下手术,进入显微神经外科时代。并在西方发达国家被普遍接受,应用逐步扩大到几乎所有神经外科手术,如颅内动脉瘤、动静脉畸形、血管重建手术、脑室内肿瘤、鞍区肿瘤、颅底肿瘤、以及过去认为属于手术禁区的脑干肿瘤和脊髓内肿瘤等。60年代以后,许多神经外科医生致力于显微神经外科技术、显微器械和颅内显微解剖的研究,并发表了有关显微神经外科的专著。
显微神经外科手术过程中,全程采用显微镜配合成像设备对手术处进行观察,从而配合主刀医师进行手术,而现有的显微设备往往通过支架固定多个摄像头和无影灯进行画面采集,与主刀医师的协调性不足,同时显微镜需要的物镜焦距较小,镜面直径较大;目镜焦距较大,镜面直径较小并且镜筒长度较长,需要空间较大,移动笨重,操作复杂。
因此,发明一种智能化显微神经外科手术用显微镜很有必要。
发明内容
本发明提供一种智能化显微神经外科手术用显微镜,通过设置陀螺仪配合脚踏开关,使主刀医师在进行手术时,显微镜可以与主刀医师更为紧密的配合,保以解决现有的显微设备往往通过支架固定多个摄像头和无影灯进行画面采集,与主刀医师的协调性不足的问题。
为了实现上述目的,本发明提供如下技术方案:一种智能化显微神经外科手术用显微镜,包括VR眼镜和支撑架,所述支撑架的一侧设置有脚踏开关,所述VR眼镜内设置有陀螺仪,所述支撑架的侧壁转动连接有连杆,且连杆远离支撑架的一端固定连接有套管,所述套管上设置有第一驱动机构,且套管的内壁滑动连接有上滑杆;
所述第一驱动机构包括第一伺服电机,所述第一伺服电机与套管的侧壁固定连接,且第一伺服电机的输出端固定连接有驱动齿轮,所述套管的下端转动连接有螺纹套,所述螺纹套的侧壁开设有与驱动齿轮匹配的齿槽,且螺纹套内螺纹连接有下滑杆,所述上滑杆和下滑杆的侧壁均固定连接有限位块,所述套管内开设有与限位块匹配的滑槽,所述上滑杆和下滑杆相互远离的一端均设置有第二驱动机构;
所述第二驱动机构包括第二伺服电机,所述第二伺服电机分别与上滑杆和下滑杆的内壁固定连接,且第二伺服电机的输出端固定连接有太阳轮,所述上滑杆和下滑杆的内壁均固定连接有内齿轮,且太阳轮与内齿轮之间设置有多个行星轮,多个所述行星轮与连接架转动连接,且连接架转动连接有限位架,所述限位架与上滑杆和下滑杆的内壁固定连接,所述连接架的上端固定连接有转动杆,且转动杆的侧壁开设有T形槽,所述T形槽的内侧壁固定连接有齿条,所述T形槽内滑动连接有T形滑块,且T形滑块内固定连接有第三伺服电机,所述第三伺服电机的输出端固定连接有行走齿轮,且行走齿轮与齿条啮合设置,所述T形滑块远T形槽的侧壁固定连接有球形套,所述球形套内滑动连接有画面采集机构;
所述画面采集机构包括物镜套管和目镜套管,所述物镜套管和目镜套管内分别设置有物镜和目镜,所述目镜套管的上端固定连接有壳体,且壳体内固定连接有摄像头,所述壳体的上端嵌设有散热风扇,所述物镜套管和目镜套管的侧壁均固定连接有与球形套匹配的滑套,且物镜套管和目镜套管内开设有通风孔,所述物镜套管的下端嵌设有多个照明灯,且物镜套管下端固定连接有导风环。
所述套管的上端侧壁固定连接有第一电动推杆,所述目镜套管的下端侧壁固定连接有第二电动推杆。
优选的,所述陀螺仪和脚踏开关通过导线电性连接有控制器,且控制器通过导线分别与第一伺服电机、第二伺服电机、第三伺服电机、第一电动推杆和第二电动推杆电性连接。
优选的,所述支撑架的一侧固定连接有副显示屏,且副显示屏通过导线与摄像头电性连接。
优选的,所述行星轮的数量至少为三个,所述行星轮的齿数大于太阳轮的齿数。
优选的,所述第一电动推杆和第二电动推杆的活动端均固定连接有橡胶垫。
优选的,所述脚踏开关包括底板,所述底板的上表面固定连接有护罩,且底板的上表面转动连接有踏板,所述底板内设置有双向开关,且双向开关的一端固定连接有卡环。
本发明的有益效果是:
1、本发明通过设置陀螺仪配合第二驱动机构,可以在主刀医师进行手术时,利用陀螺仪感应主刀医师头部的运动,从而控制第二驱动机构带动画面采集机构移动,使VR眼镜呈现的画面与主刀医师移动头部的动作相匹配,不但可以提高显微镜与主刀医师的协调性,而且降低该种医疗器械使用时的培训难度,临床利用效果好,并且控制方便,不会增加主刀医师手术时的负担;
2、本发明通过设置脚踏开关、第一驱动机构、第一电动推杆和第二电动推杆,可以方便主刀医师在手术过程中,用控制画面采集机构的焦距,从而方便主刀医师进行手术,并且无需占用双手或者他人配合,操控方便的同时调节精准。
附图说明
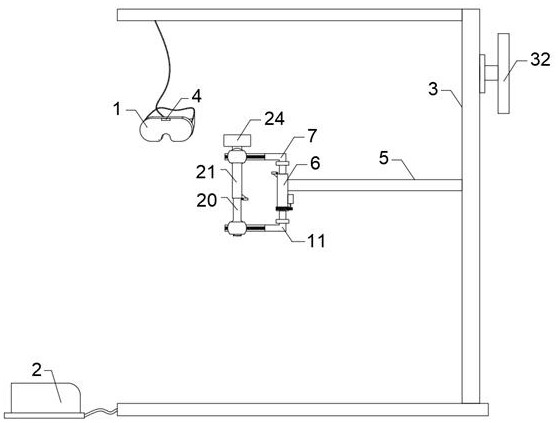
图1为本发明提供的整体结构示意图;
图2为本发明提供的局部结构示意图;
图3为本发明提供的转动杆结构示意图;
图4为本发明提供的第二驱动机构的剖视结构示意图;
图5为本发明提供的第二驱动机构的俯视结构示意图;
图6为本发明提供的画面采集机构结构示意图;
图7为本发明提供的脚踏开关结构示意图
图中:1、VR眼镜;2、脚踏开关;201、底板;202、护罩;203、踏板;204、双向开关;205、卡环;3、支撑架;4、陀螺仪;5、连杆;6、套管;7、上滑杆;8、第一伺服电机;9、驱动齿轮;10、螺纹套;11、下滑杆;12、限位块;13、第二驱动机构;131、第二伺服电机;132、太阳轮;133、内齿轮;134、行星轮;135、连接架;14、转动杆;15、齿条;16、T形滑块;17、第三伺服电机;18、行走齿轮;19、球形套;20、物镜套管;21、目镜套管;22、物镜;23、目镜;24、壳体;25、摄像头;26、散热风扇;27、通风孔;28、照明灯;29、导风环;30、第一电动推杆;31、第二电动推杆;32、副显示屏。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例,参照附图1-7,本发明提供的一种智能化显微神经外科手术用显微镜,包括VR眼镜1和支撑架3,所述支撑架3的一侧设置有脚踏开关2,所述VR眼镜1内设置有陀螺仪4,所述支撑架3的侧壁转动连接有连杆5,且连杆5远离支撑架3的一端固定连接有套管6,所述套管6上设置有第一驱动机构,且套管6的内壁滑动连接有上滑杆7;
所述第一驱动机构包括第一伺服电机8,所述第一伺服电机8与套管6的侧壁固定连接,且第一伺服电机8的输出端固定连接有驱动齿轮9,所述套管6的下端转动连接有螺纹套10,所述螺纹套10的侧壁开设有与驱动齿轮9匹配的齿槽,且螺纹套10内螺纹连接有下滑杆11,所述上滑杆7和下滑杆11的侧壁均固定连接有限位块12,所述套管6内开设有与限位块12匹配的滑槽,所述上滑杆7和下滑杆11相互远离的一端均设置有第二驱动机构13;
所述第二驱动机构13包括第二伺服电机131,所述第二伺服电机131分别与上滑杆7和下滑杆11的内壁固定连接,且第二伺服电机131的输出端固定连接有太阳轮132,所述上滑杆7和下滑杆11的内壁均固定连接有内齿轮133,且太阳轮132与内齿轮133之间设置有多个行星轮134,多个所述行星轮134与连接架135转动连接,且连接架135转动连接有限位架,所述限位架与上滑杆7和下滑杆11的内壁固定连接,所述连接架135的上端固定连接有转动杆14,且转动杆14的侧壁开设有T形槽,所述T形槽的内侧壁固定连接有齿条15,所述T形槽内滑动连接有T形滑块16,且T形滑块16内固定连接有第三伺服电机17,所述第三伺服电机17的输出端固定连接有行走齿轮18,且行走齿轮18与齿条15啮合设置,所述T形滑块16远T形槽的侧壁固定连接有球形套19,所述球形套19内滑动连接有画面采集机构;
所述画面采集机构包括物镜套管20和目镜套管21,所述物镜套管20和目镜套管21内分别设置有物镜22和目镜23,所述目镜套管21的上端固定连接有壳体24,且壳体24内固定连接有摄像头25,所述壳体24的上端嵌设有散热风扇26,所述物镜套管20和目镜套管21的侧壁均固定连接有与球形套19匹配的滑套,且物镜套管20和目镜套管21内开设有通风孔27,所述物镜套管20的下端嵌设有多个照明灯28,且物镜套管20下端固定连接有导风环29。
所述套管6的上端侧壁固定连接有第一电动推杆30,所述目镜套管21的下端侧壁固定连接有第二电动推杆31。
进一步地,所述陀螺仪4和脚踏开关2通过导线电性连接有控制器,且控制器通过导线分别与第一伺服电机8、第二伺服电机131、第三伺服电机17、第一电动推杆30和第二电动推杆31电性连接,所有电子元器件均通过实体电缆电性连接,可以保证电信号的稳定性,避免因手术室内其他医疗器械所产生辐射或信号造成干扰。
进一步地,所述支撑架3的一侧固定连接有副显示屏32,且副显示屏32通过导线与摄像头25电性连接,通过设置副显示屏32,可以便于医师的助手观察手术情况,辅助主刀医师进行手术。
进一步地,所述行星轮134的数量至少为三个,所述行星轮134的齿数大于太阳轮132的齿数。
进一步地,所述第一电动推杆30和第二电动推杆31的活动端均固定连接有橡胶垫,通过设置橡胶垫,可以避免第一电动推杆30和第二电动推杆31的活动端对设备造成损伤,并且提高摩擦力。
进一步地,所述脚踏开关2包括底板201,所述底板201的上表面固定连接有护罩202,且底板201的上表面转动连接有踏板203,所述底板201内设置有双向开关204,且双向开关204的一端固定连接有卡环205,该种设计,可以方便医务人员通过控制脚尖上下运动,从而驱动画面采集机构调节焦距。
工作原理,在医务人员进行手术时,首先戴上VR眼镜1,主刀医师通过VR眼镜1呈现的画面进行手术,佩戴VR眼镜1,可以在有效避免头部出汗滴在眼部,避免汗液流入眼镜,保证医务人员在手术过程中视线条件良好,无需副手擦汗,在手术过程中,医务人员通过转动或者平移头部,配合VR眼镜1内的陀螺仪4配合控制器向第二驱动机构13发出信号,从而控制画面采集机构移动,调整主刀医师所观看到的画面,配合主刀医师进行手术,另一方面,主刀医师通过脚踏开关2,通过脚踩或者用脚背向上带动脚踏开关2的方式,控制第一驱动机构带动画面采集机构调节焦距,从而在双手进行手术操作的同时,精准调节画面采集机构;
在主刀医师转动头部调节视角时,VR眼镜1内的陀螺仪4配合控制器向第二驱动机构13发出信号,这时位于上方的第二伺服电机131转动,带动太阳轮132转动,太阳轮132带动多个行星轮134转动,并且配合内齿轮133,使多个行星轮134围绕太阳轮132旋转,这时多个行星轮134带动连接架135以太阳轮132为圆形转动,从而使转动杆14转动,与此同时,第三伺服电机17带动行走齿轮18转动,第三伺服电机17转动时,配合齿条15,利用反作用力带动T形滑块16沿着转动杆14在水平方向位移,从而使球形套19在水平方向的位置发生变化,这时滑套在球形套19内转动,并且带动画面采集机构的上端在水平方向位移,从而配合位于下方的球形套19和滑套使画面采集机构可以转动,改变物镜22的朝向,实现配合主刀医师头部转动调节视角的目的,并且同步效果好,可以有效配合医务人员的体感,不会出现方向变化,使主刀医师可以准确主控制手术刀,手术钳等器械等移动方向,在主刀医师水平方向移动头部调节视角时,VR眼镜1内的陀螺仪4配合控制器向第二驱动机构13发出信号,从而带动位于下方的第二驱动机构13设备运行,从而全面配合主刀医师头部的移动,随之调节视角,值得一提的是,由于设置有两个独立的第二驱动机构13,在主刀医师水平方向移动头部调节视角的同时,主刀医师也可以转动头部调节视角,两个驱动设备不会发生干涉,并且在控制器的配合下,具有较高的灵活性能。
在主刀医师通过脚踏开关2,通过脚踩或者用脚背向上带动脚踏开关2,控制画面采集机构调节焦距时,第一伺服电机8旋转,配合螺纹套10带动下滑杆11向上下滑动,与此同时,第一电动推杆30伸出,使橡胶垫与上滑杆7相抵,从而使上滑杆7与套管6无法自由滑动,而第二电动推杆31收缩,使物镜套管20与目镜套管21可以自由滑动,这时画面采集机构的物镜套管20与目镜套管21相对移动,这时物镜22与目镜23之间的距离发生变化,从而调整画面采集机构的焦距,方便医务人员观察患者手术处的画面,而在调节完成后,松开脚踏开关2,第一伺服电机8旋转停止,第一电动推杆30收缩、第二电动推杆31伸出伸出,从而使物镜套管20与目镜套管21相对固定,而上滑杆7处于可以滑动的状态,避免在调节画面采集机构方向时造成干涉;
在手术过程中通过散热风扇26对摄像头25进行散热,物镜套管20下端的照明灯28可以对提供有效照明,并且与物镜套管20同步移动,可以提供稳定的光源,同时照明灯28在运行时也会发热,而对摄像头25散热的热风向下流动同时再经过照明灯28加热,然后在导风环29的带动下吹向物镜22,从而避免物镜22上凝露或者在粘上患者体液后可以快速蒸干,保证画面采集机构的稳定运行。
以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
- 一种智能化显微神经外科手术用显微镜
- 一种显微镜以及智能化显微镜系统