一种基于分数阶滑模控制的无刷双馈电机低压穿越技术
文献发布时间:2023-06-19 10:06:57
技术领域
本发明涉及一种无刷双馈电机直接功率控制的控制方法,尤其涉及电网电压跌落时一种基于分数阶滑模变结构的无刷双馈风力发电系统机侧和网侧控制器的控制方法。
背景技术
传统的无刷双馈发电系统的控制方法是仅有机侧控制器,网侧变换器直接与电网相连,在机侧控制器中采用直接功率控制,内环采用电流PI控制方法的闭环控制,外环采用有功功率和无功功率PI控制方法的闭环控制,但是PI控制方法不能精确追踪正弦参考信号,并对外部干扰比较敏感,尤其在电网电网跌落时,无功功率存在纹波,直流母线电压出现较大波动。
发明内容
针对传统直接功率控制策略存在的对外部干扰比较敏感和电网电压跌落时出现的无功功率纹波以及直流母线电压较大波动等问题,提出一种基于分数阶滑模变结构控制的无刷双馈风力发电机直接功率控制策略。
为了达到上述目的,本发明解决技术问题采取的技术方案是:
一种基于分数阶滑模变结构控制的无刷双馈电机低压穿越技术,包括下列步骤:
(1)建立无刷双馈电机的数学模型,无刷双馈电机(Brushless Doubly-Fed Machine,BDFM)在转子坐标系下数学模型表示为:
BDFM的电磁转矩变为:
磁链方程为:
BDFM的有功功率和无功功率可表示为:
采用功率绕组定子磁场定向,
功率绕组在正常工作中电阻压降远小于电机反电势,同时也远小于电抗压降,因此可以假设功率绕组定子磁链保持恒定。功率绕组定子电压方程可以写成下式:
由磁链方程可得绕组定子电流为,
其中
对上式进一步求导,联合式(3)推出:
(2)机侧滑模变结构控制器设计
滑模变结构控制器是为了消除系统状态变量与参考值之间的误差,定义滑模控制器的输入为系统变量与参考值之差,因此定义无刷双馈电机的滑模变结构控制器的状态变量为有功功率和无功功率的实际值与参考值之间的偏差:
采用分数阶趋近律设计机侧滑模变结构控制器,通过分数阶函数代替传统开关函数以减小滑模切换的高频抖振,现构造如下滑模面S=[S
式中λ
其中
将
式中:∑和Γ为对角阵;0<ζ<1,而ΔS=χ+(1+χ)e
根据功率绕组dq轴电压和电流
(3)网侧滑模变结构控制器设计
网侧滑模变结构控制器采用双闭环控制,外环采用电压环,内环采用电流环。网侧变换器在dq坐标系下的数学模型如式(17)所示。
式中u
网侧电压环滑模变结构控制器设计采用指数趋近律进行设计,电压环滑模变结构设计,网侧PWM交流侧有功功率P
直流侧有功功率P
在忽略损耗的情况下,有P
假设
直流母线电压平方的误差为:
e
式(22)两端取微分得:
根据指数趋近律滑模变结构理论,将滑模面设计为:
其中k为赫尔维茨判据条件且k>0。
将式(24)两端取微分得:
采用指数趋近律,将
其中k
母线电压u
网侧电流环滑模变结构控制器设计采用分数阶趋近律进行设计,构造如下滑模面S
其中
与机侧滑模变结构控制器设计方法类似,根据网侧逆变器的数学模型,推导出对于网侧逆变器的控制输入为:
其中
根据指数滑模变结构控制输出功率绕组d轴电流
本发明中,步骤(2)所述的分数阶滑模变结构机侧控制器,不仅有较小的功率跟踪误差,而且能够减小无功功率中的纹波,步骤(3)所述的分数阶滑模变结构网侧控制器,能够较小电流跟踪误差,分数阶滑模变结构能够减小传统滑模控制中存在的抖振问题,使控制系统更加稳定可靠。
本发明提供的一种基于分数阶滑模变结构控制的无刷双馈电机低压穿越技术,由两个三相两电平电压型背靠背PWM变换器、机侧控制器、网侧控制器和无刷双馈电机连接组成,其中机侧控制器采用分数阶滑模变结构直接功率控制,网侧控制器内环采用分数阶滑模变结构电流控制,外环采用指数滑模变结构直流母线电压控制,使无刷双馈风力发电系统更加稳定可靠运行。
附图说明
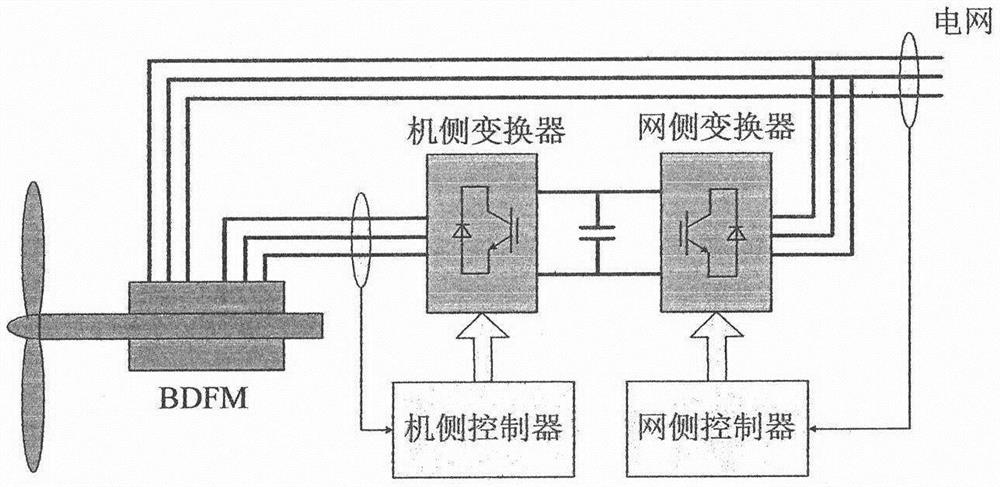
图1:无刷双馈风力发电系统机组图
图2:本发明控制系统原理图
具体实施方式
下面结合附图和实施例对本发明的一种基于分数阶滑模变结构控制的无刷双馈电机低压穿越技术进一步的详细说明。
图1为无刷双馈风力发电系统机组图,机侧控制器和网侧控制器分别发出信号给机侧变换器和网侧变换器中的功率器件,通过功率器件的开通和关断实现无刷双馈风力发电系统的控制。图2所示为控制系统原理图,机侧控制器中,检测到的三相定子电压和电流,过克拉克变换和帕克变换得到功率绕组dq轴电压和电流,进一步计算无刷双馈电机的实时的有功功率和无功功率,送入分数阶滑模变结构控制器,输出经反帕克变换选择合适的电压空间矢量来控制无刷双馈电机。网侧控制器中,检测到的直流母线电压送入指数滑模变结构控制器,对直流母线电压进行控制。
结合图2叙述本发明的基于分数阶滑模变结构控制的无刷双馈电机低压穿越技术,包括下列步骤:(1)建立无刷双馈电机的数学模型,无刷双馈电机(Brushless Doubly-Fed Machine,BDFM)在转子坐标系下数学模型表示为:
BDFM的电磁转矩变为:
磁链方程为:
BDFM的有功功率和无功功率可表示为:
采用功率绕组定子磁场定向,
功率绕组在正常工作中电阻压降远小于电机反电势,同时也远小于电抗压降,因此可以假设功率绕组定子磁链保持恒定。功率绕组定子电压方程可以写成下式:
由磁链方程可得绕组定子电流为,
其中
对上式进一步求导,联合式(3)推出:
(2)机侧滑模变结构控制器设计
滑模变结构控制器是为了消除系统状态变量与参考值之间的误差,定义滑模控制器的输入为系统变量与参考值之差,因此定义无刷双馈电机的滑模变结构控制器的状态变量为有功功率和无功功率的实际值与参考值之间的偏差:
采用分数阶趋近律设计机侧滑模变结构控制器,通过分数阶函数代替传统开关函数以减小滑模切换的高频抖振,现构造如下滑模面S=[S
式中λ
其中
将
式中:∑和Γ为对角阵;0<ζ<1,而ΔS=χ+(1+χ)e
根据功率绕组dq轴电压和电流
(3)网侧滑模变结构控制器设计
网侧滑模变结构控制器采用双闭环控制,外环采用电压环,内环采用电流环。网侧变换器在dq坐标系下的数学模型如式(17)所示。
式中u
网侧电压环滑模变结构控制器设计采用指数趋近律进行设计,电压环滑模变结构设计,网侧PWM交流侧有功功率P
直流侧有功功率P
在忽略损耗的情况下,有P
假设
直流母线电压平方的误差为:
e
式(22)两端取微分得:
根据指数趋近律滑模变结构理论,将滑模面设计为:
其中k为赫尔维茨判据条件且k>0。
将式(24)两端取微分得:
采用指数趋近律,将
其中k
母线电压u
网侧电流环滑模变结构控制器设计采用分数阶趋近律进行设计,构造如下滑模面S
其中
与机侧滑模变结构控制器设计方法类似,根据网侧逆变器的数学模型,推导出对于网侧逆变器的控制输入为:
其中
根据指数滑模变结构控制输出功率绕组d轴电流
- 一种基于分数阶滑模控制的无刷双馈电机低压穿越技术
- 一种基于分数阶自适应滑模控制的混沌系统同步方法