停车辅助装置及停车辅助方法
文献发布时间:2023-06-19 10:08:35
技术领域
本申请所涉及的发明涉及停车辅助装置及停车辅助方法。
背景技术
现有停车辅助装置中,在停本车辆时,基于成为停车障碍的障碍物的检测结果对可停车车位进行检测,并对检测出的可停车车位中是否存在车辆的停车车位进行判定从而设定可停车车位中的框配置候补(例如,参照专利文献1)。这样的停车辅助装置中,将表示所设定的框配置候补的图像与拍摄图像或假想视点图像进行合成,并作为合成图像来显示,从而对用户的停车操作进行辅助。
现有技术文献
专利文献
专利文献1:日本专利特开2016-215691号公报
发明内容
发明所要解决的技术问题
然而,如上述那样的方案中,需要通过由用户选择使本车辆停车的框配置候补等,从而明确示出停车辅助的开始。因此,在要将本车辆停在用户所希望的停车车位时,必须在使本车辆停车后进行停车辅助开始指示,有可能会使得直到开始停车辅助为止的步骤变得复杂。
本申请所涉及的发明是为了解决上述问题而完成的,其目的在于得到一种停车辅助装置以及停车辅助方法,能防止用户的便利性受损,且使本车辆顺畅地停在所希望的车位。
解决技术问题所采用的技术方案
本发明所涉及的停车辅助装置包括:
用户设定部,该用户设定部由用户设定与本车辆的停车有关的信息;目标停车车位搜索/选择部,该目标停车车位搜索/选择部对可停本车辆的车位进行搜索,并基于所述用户设定的信息来选择使本车辆停车的目标停车车位;停车操作辅助部,该停车操作辅助部基于后述的停车操作辅助开始判定部的开始判定结果,来辅助使本车辆停在所选择的目标停车车位的停车操作;以及
停车操作辅助开始判定部,该停车操作辅助开始判定部在所述开始判定结果是可开始停车操作辅助部所进行的停车操作的辅助的情况下,使停车操作辅助部开始停车操作的辅助。
另外,本发明所涉及的停车辅助方法包括:
用户设定步骤,该用户设定步骤由用户设定与本车辆的停车有关的信息;目标停车车位搜索/选择步骤,该目标停车车位搜索/选择步骤对可停本车辆的车位进行搜索,并基于所述用户设定的信息来选择使本车辆停车的目标停车车位;停车操作辅助步骤,该停车操作辅助步骤基于后述的停车操作辅助开始判定步骤的开始判定结果,来辅助使本车辆停在所选择的目标停车车位的停车操作;以及
停车操作辅助开始判定步骤,该停车操作辅助开始判定步骤在所述开始判定结果是可开始停车操作辅助步骤所进行的停车操作的辅助的情况下,使所述停车操作辅助步骤开始停车操作的辅助。
发明效果
本申请所涉及的发明能防止用户的便利性受损,且使本车辆顺畅地停在所希望的停车车位。
附图说明
图1是表示实施方式1中的车辆辅助装置的结构的框图。
图2是表示本申请所公开的停车辅助装置的显示画面的示例的图,是表示停车辅助开始时的显示画面的图。
图3是表示本申请所公开的停车辅助装置的显示画面的示例的图,是表示目标停车车位选择时的显示画面的图。
图4是表示本申请所公开的停车辅助装置的显示画面的示例的图,是表示停车操作辅助开始时的显示画面的图。
图5是表示实施方式1中的停车辅助装置的硬件结构图。
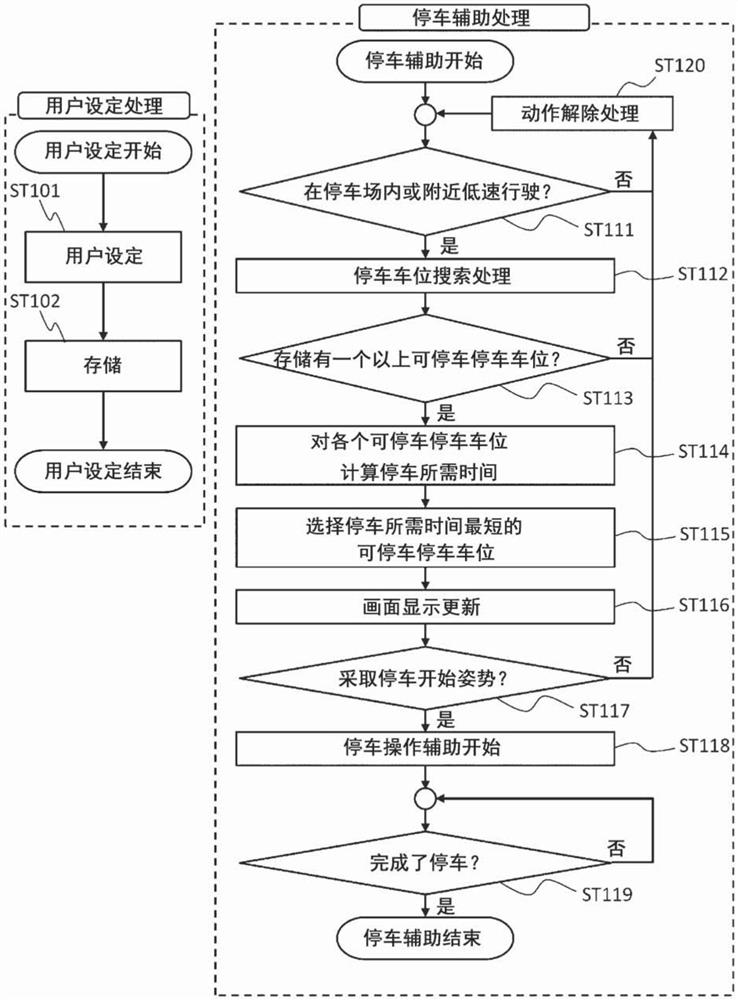
图6是表示实施方式1中的停车辅助方法的流程图。
图7是表示实施方式1所涉及的停车车位搜索处理的流程图。
图8是表示实施方式2中的停车辅助装置的结构的框图。
图9是表示实施方式2中的停车辅助方法的流程图。
图10是表示实施方式3中的停车辅助装置的结构的框图。
图11是表示实施方式3中的停车辅助方法的流程图。
图12是表示实施方式4中的停车辅助装置的结构的框图。
图13是表示实施方式4中的停车辅助方法的流程图。
图14是表示实施方式5中的停车辅助装置的结构的框图。
图15是表示实施方式5中的停车辅助方法的流程图。
图16是表示实施方式5所涉及的残疾人优先停车车位搜索处理的流程图。
图17是表示实施方式6中的停车辅助装置的结构的框图。
图18是表示实施方式6中的停车辅助方法的流程图。
图19是表示实施方式6所涉及的停车车位搜索处理的流程图。
具体实施方式
实施方式1.
以下,基于图1至图7对实施方式1进行说明。图1是表示实施方式1中的停车辅助装置的结构的框图。停车辅助装置10搭载于作为停车辅助对象的本车辆(未图示)。110是用户设定部,接受用户设定信息的输入。120是停车车位搜索部,对本车辆周边的可停车车位进行搜索。130是目标停车车位选择部,根据用户指定的选择条件,从停车车位搜索部120检测出的可停车车位中选择目标停车车位。140是停车操作辅助开始判定部,对是否处于能够辅助停车操作的状态进行判定。150是停车操作辅助部,基于停车操作辅助开始判定部140的判定结果,辅助用户进行的停车操作。180是显示部,使LCD(Liquid Crystal Display:液晶显示器)等显示装置181显示各种信息。190是动作解除部,在满足预定条件的情况下,解除执行中的停车辅助动作,使停车辅助动作从最初开始进行。此外,这里的“可停车停车车位”是指能够停本车辆的停车车位。另外,“目标停车车位”成为使本车辆停车的目标。
用户设定部110在从用户接受用户设定信息的输入(接收)后,使用户设定存储部111存储用户设定信息。用户设定信息中包含本车辆的尺寸信息等停车车位的条件以及用户的喜好信息等,如后所述,选择目标停车车位的选择条件是基于用户的喜好信息而设定的。即,用户通过向用户设定部110输入与停车相关的自身的喜好信息,来设定用于选择目标停车车位的选择基准。另外,在实施方式1中,作为用户的喜好信息输入“在辅助停车时,希望停在停车结束前所需时间最短的停车车位”。因此,目标停车车位的选择条件是“停车所需时间最短”。
停车车位搜索部120由以下的121至123的构件构成。121是对本车辆周边的停车车位进行检测的停车车位检测部。122是停车车辆检测部,对停车车位检测部121检测出的停车车位中停车的其他车辆进行检测。123是可停车停车车位存储部,存储在停车车位检测部121检测出的停车车位中未被停车车辆检测部122检测出停车中的其他车辆的停车车位、即作为可停本车辆的停车车位的可停车停车车位的信息。
停车车位检测部121获取由拍摄本车辆周边的摄像头161拍摄的周边图像,并且从外部信息接收部162获取本车辆周边的地图信息以及本车辆的位置信息等,使用这些信息来搜索、检测本车辆周边的停车车位。停车车位检测部121根据来自外部信息接收部162的位置信息以及摄像头161的周边图像,对本车辆到达停车场内或停车场附近的情况进行检测,并对本车辆周边的停车车位进行搜索。停车车位检测部121根据地图信息及周边图像识别路面上的线及挡车器,对由识别出的线包围的框的大小及形状、和存储于用户设定存储部111的本车辆的尺寸信息进行比较,检测与本车辆的尺寸一致的停车车位。在从外部信息接收部162获得的地图信息中包含周边的停车车位的位置信息的情况下,也可以使用从外部信息接收部162获取的地图信息来检测停车车位。此外,搜索停车车位的范围可以在用户设定部110中设定。停车车位检测部121在检测本车辆周边的停车车位时,获取与检测出的停车车位的位置、宽度、纵深、形状相关的信息(以下称为检测停车车位信息)。
摄像头161设置在本车辆的前方、侧方、后方等本车辆的周围,拍摄本车辆的周边。例如,能够使用CCD(Charge-Coupled Device:电荷耦合元件)摄像头或CMOS(Complementary Metal-Oxide Semiconductor:互补金属氧化物半导体)摄像头作为摄像头161。外部信息接收部162例如从GPS(Global Positioning System:全球定位系统)装置接收信息,经由GPS装置从人造卫星接收本车辆周边的地图信息。
停车车辆检测部122从停车车位检测部121获取检测停车车位信息,并且从摄像头161和外部信息接收部162获取本车辆的周边信息,通过比较该周边信息和检测停车车位信息,来对停在检测停车车位的停车车辆进行检测。通过停车车辆检测部122检测出停车车辆的检测停车车位中,已经停有其他车辆,不能使本车辆停车。相反,在停车车辆检测部122未检测到停车车辆的检测停车车位中未停有它车辆,可使本车辆停车。
可停车停车车位存储部123从停车车位检测部121获取检测停车车位信息,并且参照停车车辆检测部122所进行的停车车辆的检测结果,仅将检测停车车位中、能停本车辆的停车车位存储为可停车停车车位。
目标停车车位选择部130从可停车停车车位存储部123获取可停车停车车位的信息,并且从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“停车所需时间最短”这一选择条件,并根据该选择条件来选择目标停车车位。
目标停车车位选择部130具备停车所需时间计算部131,该停车所需时间计算部131计算为了将本车辆停在可停车停车车位而所需的停车所需时间。停车所需时间计算部131针对存储于可停车停车车位存储部123的一个以上的可停车停车车位分别计算停车所需时间。停车所需时间可以通过将停到对象的可停车停车车位为止的预想路径的长度除以停车动作中的本车辆的预想速度来计算。可以根据本车辆的当前位置及朝向、和对象的可停车停车车位的位置和朝向来设定预想路径。预想速度可以通过用户设定部110由用户指定,也可以基于过去的停车动作中的平均速度来决定预想速度。目标停车车位选择部130根据目标停车车位的选择条件,将停车所需时间最短的可停车停车车位设定为目标停车车位。
选择目标停车车位的目标停车车位选择部130将目标停车车位的选择完成的意思通知给停车操作辅助开始判定部140和显示部180。另外,目标停车车位选择部130将目标停车车位的位置、朝向、形状、大小等信息发送给停车操作辅助部150及显示部180。在由于没有可停车停车车位等而无法选择目标停车车位的情况下,将无法选择目标停车车位的意思通知给动作解除部190及显示部180。
停车操作辅助开始判定部140在从目标停车车位选择部130接收到目标停车车位的选择的通知后,根据本车辆的状态对是否满足用于判定是否能够开始停车操作的判定条件进行判定,在满足该判定条件的情况下使停车操作辅助部150开始停车操作辅助。在实施方式1中,将“本车辆是否采取停车开始姿势”作为是否使停车操作辅助部150开始停车操作辅助的判定条件。这里,“停车开始姿势”例如是指“本车辆停止,换挡进入倒车的状态”。在本车辆采取停车开始姿势的情况下,认为“用户希望获得停车辅助以将本车辆停在目标停车车位”,将停车操作辅助开始的指令发送到停车操作辅助部150,并且将停车操作辅助开始的通知发送到显示部180。接受到停车操作辅助开始的指令的停车操作辅助部150开始停车操作辅助。另外,接受到停车操作辅助的通知的显示部180使显示装置181显示表示开始了停车操作辅助的情况的显示。总而言之,所述停车操作辅助开始判定部基于所述本车辆的行驶状态或所述本车辆的换挡状态,对停车操作辅助部是否能开始停车操作的辅助进行判定(开始判定)。例如,在所述停车操作辅助开始判定部中,判定(开始判定)为本车辆的换挡进入倒车的状态,停车操作辅助部可开始停车操作的辅助。然后,所述停车操作辅助开始判定部在可开始停车操作辅助部所进行的停车操作的辅助的情况下(在开始判定的情况下),使所述停车操作辅助部开始停车操作的辅助。
在本车辆未停止或者虽然停止但没有换挡进入倒车的情况下,认为“用户不希望将本车辆停在目标停车车位”,将解除动作的指令发送给动作解除部190,并且将动作解除的通知发送给显示部180。在目标停车车位是手动指定的情况下,认为“用户希望对手动指定的停车车位进行停车操作辅助”,即使对用户手动指定的停车车位的停车所需时间不是最短,也可以将用户手动指定的停车车位设定为目标停车车位,将停车操作辅助开始的指令发送给停车操作辅助部150,并且可以将停车操作辅助开始的通知发送给显示部180,在这种情况下,接受到停车操作辅助开始的指令的停车操作辅助部150开始停车操作辅助。另外,接受到停车操作辅助的通知的显示部180使显示装置181显示表示对用户手动指定的停车车位开始了停车操作辅助的情况的显示。
从停车操作辅助开始判定部140接受到停车操作辅助开始的指令的停车操作辅助部150进行停车操作辅助以使本车辆停在目标停车车位上。具体而言,停车操作辅助部150通过沿着本车辆的当前位置到停车位置的路径操作方向盘来辅助用户的停车操作。另外,除了方向盘操作之外,停车操作辅助部150也可以进行加速器/制动器操作。该情况下,用户无需在停车操作中进行一切手动操作。可以通过用户设定部110预先设定进行哪种程度的停车辅助。
显示部180使显示装置181显示停车辅助装置10所进行的停车辅助的状况,从摄像头161获取周边图像,并且从可停车停车车位存储部123获取可停车停车车位的信息,显示将周边图像和可停车停车车位的信息合成得到的图像或视频。图2是表示停车辅助开始时的显示画面的图,图3是表示目标停车车位检测时及选择时的显示画面的图。另外,图4是表示停车操作辅助开始时的显示画面的图。此外,是图2到图4所示的显示画面一例,但并不限于此。
在显示画面900A中,显示表示在停车场内本车辆901低速行驶的状态的俯视视频。这样的俯视视频能够从摄像头161获得。另外,在显示画面900A中,显示停车中的其他车辆902以及停车车位周边的障碍物903。
在显示画面900B中,表示检测出的多个可停车车位911~914。此外,关于可停车停车车位911~913,显示了表示各个可停车车位的特征的标记911a~913a。标志911a表示停车所需时间最短的可停车停车车位,标志912a表示作为出库所花费的时间的出库所需时间最短的可停车停车车位。另外,标志913a表示停车完成后的作为本车辆两侧的车位的停车剩余车位最大。显示部180为了向用户示出可停车停车车位911~914内的哪个可停车停车车位被选择为目标停车车位,在显示画面900B中强调显示被选择为目标停车车位的可停车停车车位。在显示画面900B中,由于是选择了作为停车所需时间最短的可停车停车车位的可停车停车车位911的情况的显示例,因此在可停车停车车位911上打上阴影来进行显示。强调显示的方法并不特别限定,也可以使目标停车车位闪烁。另外,也可以通过从画面上删除未被选择为目标调查车位的可停车停车车位来表示目标停车车位。通过显示画面900B,用户可以容易地确认目标停车车位的位置、朝向以及周围的状况等。
在显示画面900C中,显示在被选择为目标停车车位的可停车停车车位911中使本车辆901停车时的预测停车路径920。当开始停车操作辅助部150所进行的停车操作辅助时,显示直到本车辆901沿着预测停车路径920停车到可停车停车车位911为止的动作。通过显示画面900C,用户能够容易地确认停车动作中的本车辆901的状况。
接着,对实现图1所示的各功能部的硬件结构进行说明。图5是表示实施方式1中的停车辅助装置的硬件结构图。在停车辅助装置10中,摄像头161和显示装置181连接到主装置81,在主装置81中,经由系统布线818连接有将执行实现上述各功能部的程序的处理器811、存储处理器811执行的程序和各种数据的ROM(Read Only Meomory:只读存储器)812和RAM(Random Access Memory:随机存取存储器)813、接收来自输入设备821的输入的输入电路814、进行主装置81和摄像头161之间的输入输出处理的摄像头接口(I/F)815、向例如液晶显示屏等显示装置181输出显示画面的输出电路816、以及在与外部GPS设备822之间进行数据收发的通信输入输出电路817。停车辅助装置10的各功能部通过处理器811执行存储于ROM812和RAM813等存储器的程序来实现。另外,也可以使多个处理器811以及多个ROM812、RAM813协作来实现上述功能部。此外,作为输入设备821,例如可以使用触摸面板或键盘等,也可以使用麦克风等声音输入装置。
接着,对动作进行说明。图6是表示实施方式1中的停车辅助方法的流程图,图7是表示实施方式1所涉及的停车车位搜索处理的流程图。实施方式1中的停车辅助方法包含“用户设定处理”和“停车辅助处理”。另外,停车辅助处理包含“停车车位搜索处理”、“目标停车车位选择处理”、“停车操作辅助开始判定处理”以及“停车操作辅助处理”。首先,在用户设定处理中,用户设定部110从用户接受与停车相关的设定信息(步骤ST101,用户设定步骤)。用户使用输入装置821输入“希望停在直到停车完成所花费的时间最短的停车车位”这一喜好信息以及与其他停车相关的条件,以作为与停车相关的自身喜好信息。接着,用户设定部110将步骤ST101中输入的内容作为用户设定信息存储到用户设定存储部111(步骤ST102),结束用户设定处理。
停车辅助处理在用户设定处理结束后,在用户驾驶本车辆时执行。首先,使用摄像头161拍摄到的周边图像以及外部信息接收部162接收到的地图信息等,对本车辆是否到达停车场内或停车场附近并低速行驶进行判定(步骤ST111)。在本车辆没有在停车场内或停车场附近低速行驶的情况下,由于不是开始停车辅助的状况,因此通过动作解除部190进行动作解除处理(步骤ST120、动作解除步骤)。
在本车辆在停车场内或停车场附近低速行驶的情况下,使显示装置181显示显示画面900A,并且通过停车车位搜索部120进行停车车位搜索处理(步骤ST112、停车车位搜索步骤)。在停车车位搜索处理中,首先,通过停车车位检测部121搜索本车辆周边的停车车位(步骤ST1121,停车车位检测步骤)。进行搜索的范围基于用户设定信息来决定。例如,设定为以本车辆为中心在5m以内进行搜索。搜索结束后,对是否检测到停车车位进行判定(步骤ST1122),在完全没有检测到的情况下,结束处理。
在检测到停车车位的情况下,通过停车车辆检测部122对其他车辆是否停在检测出的停车车位上进行判定(步骤ST1123、停车车辆检测步骤)。在停有其他车辆的情况下,不被视为可停车停车车位。在没有停其他车辆的情况下,将检测出的停车车位作为可停车停车车位,将该信息存储于可停车停车车位存储部123(步骤ST1124)。在步骤ST1121中检测到多个停车车位的情况下,对于各个停车车位执行步骤ST1123和步骤ST1124。由此,在搜索结束时检测到的所有可停车停车车位的信息被存储于可停车停车车位存储部123。
在停车车位搜索处理结束后,通过目标停车车位选择部130对在可停车停车车位存储部123中是否存储有一个以上的可停车停车车位的信息进行判定(步骤ST113)。在完全没有存储可停车停车车位的情况下,前进到步骤ST120,进行动作解除处理。
存储有1个以上可停车停车车位时,进行目标停车车位选择处理。首先,通过停车所需时间计算部131计算各个可停车停车车位的停车所需时间(步骤ST114),接着,选择停车所需时间最短的可停车停车车位作为目标停车车位(步骤ST115,目标停车车位选择步骤)。若选择了目标停车车位,则通过显示部180更新显示装置181上显示的显示画面(步骤ST116)。由此,显示图3所示的显示画面900B。
接着,通过停车操作辅助开始判定部140进行停车操作辅助开始判定处理。停车操作辅助开始判定部140对本车辆是否采取了停车开始姿势进行判定(步骤ST117、停车操作辅助开始判定步骤),在不采取停车开始姿势的情况下不开始停车操作,因此前进到步骤ST120,进行动作解除处理。
在本车辆采取停车开始姿势的情况下,开始停车操作辅助部150所进行的停车操作辅助处理(步骤ST118,停车操作辅助步骤)。之后,定期判定停车是否完成(步骤ST119),若停车完成则结束停车辅助处理。
此外,在步骤ST120中进行了动作解除处理的情况下,返回到步骤ST111,重新执行以后的动作。在已经选择了目标停车车位的情况下,取消选择,重新进行目标停车车位的选择。即,用户在步骤ST117中不采取停车开始姿势,从而能够重新执行目标停车车位的选择。
根据实施方式1,能够在防止便利性受损的同时,将本车辆顺畅地停在所希望的停车车位上。更具体地说,包括停车操作开始辅助判定部,该停车操作开始辅助判定部根据本车辆是否采取停车开始姿势这一基于本车辆的状态的判定条件,来判定是否开始停车操作辅助。由此,在用户希望将本车辆停在目标停车车位的情况下启动停车操作辅助部,本车辆的停车能顺畅地进行。因此,在防止便利性受损的同时,能够将本车辆顺畅地停在所希望的车位上
另外,由于包括目标停车车位选择部,该目标停车车位选择部获取用户的喜好信息,将用户的喜好信息作为选择条件来选择目标停车车位,因此,用户只要预先设定自身的喜好信息即可,在停车辅助中不要求选择目标停车车位。因此,便利性进一步提高。
实施方式2.
以下,基于图8及图9对实施方式2进行说明。此外,对于与图1至图7相同或相当的部位使用相同的标号,除非特别需要,否则省略说明。图8是表示实施方式2中的停车辅助装置20的结构的框图。110是用户设定部,接受用户设定信息的输入。120是停车车位搜索部,对本车辆周边的可停车停车车位进行搜索。230是目标停车车位选择部,根据用户指定的选择条件从可停车停车车位中选择目标停车车位。140是停车操作辅助开始判定部,对是否处于能够辅助停车操作的状态进行判定。150是停车操作辅助部,基于停车操作辅助开始判定部140的判定结果,辅助用户进行的停车操作。180是显示部,使显示装置181显示各种信息。190是动作解除部,在满足预定条件的情况下,解除执行中的停车辅助动作,使停车辅助动作从最初开始进行。另外,在实施方式2中,作为用户的喜好信息输入“在停车辅助时,希望将本车辆停在距本车辆的停止位置最近的停车车位”。因此,目标停车车位的选择条件是“距本车辆的停止位置的距离最小”。
目标停车车位选择部230从可停车停车车位存储部123获取可停车停车车位的信息,并且从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“距本车辆的停止位置的距离最小”这一选择条件,并根据该选择条件来选择目标停车车位。
目标停车车位选择单元230包括计算指定的两个点之间的欧几里得距离的距离计算部231。距离计算部231针对存储于可停车停车车位存储部123的一个以上的可停车停车车位分别计算距本车辆的距离。从本车辆到各个可停车停车车位的距离可以设为各个可停车停车车位的特定点与本车辆的特定点之间的欧几里得距离。作为可停车停车车位的特定点,例如可以设为该可停车停车车位的中央、入口的中央或入口的拐角,而不作特别限定。另外,作为本车辆的特定点,例如可以是车辆中央或车辆后轮轴中央,而不作特别限定。另外,可以从GPS装置822获取可停车车位的特定点的位置和本车辆的特定点的位置。目标停车车位选择部230根据目标停车车位的选择条件,将距本车辆的停止位置的距离最小的可停车停车车位设定为目标停车车位。其他结构与实施方式1相同。
接着,对动作进行说明。图9是表示实施方式2中的停车辅助方法的流程图。实施方式2中的停车辅助方法与实施方式1相同,包含“用户设定处理”和“停车辅助处理”。另外,停车辅助处理包含“停车车位搜索处理”、“目标停车车位选择处理”、“停车操作辅助开始判定处理”以及“停车操作辅助处理”,在这一点上也与实施方式1相同。首先,从用户接受“想要将本车辆停在距本车辆的停止位置最近的停车车位”这一喜好信息、和其他与停车相关的条件的输入(步骤ST101),作为用户设定信息存储于用户设定存储部111(步骤ST102),结束用户设定处理。
停车辅助处理在用户设定处理结束后,在用户驾驶本车辆时执行。首先,对车辆是否到达停车场内或停车场附近并低速行驶进行判定(步骤ST111),在本车辆没有在停车场内或停车场附近低速行驶的情况下,通过动作解除部190进行动作解除处理(步骤ST120)。
在本车辆在停车场内或停车场附近低速行驶的情况下,使显示装置181显示显示画面900A,并且通过停车车位搜索部120进行停车车位搜索处理(步骤ST112)。实施方式2的停车车位搜索处理与实施方式1相同,因此省略其说明。
在停车车位搜索处理结束后,通过目标停车车位选择部230对在可停车停车车位存储部123中是否存储有1个以上的可停车停车车位信息进行判定(步骤ST113),在完全没有存储可停车停车车位的情况下前进至步骤ST120,进行动作解除处理。
在存储有1个以上可停车停车车位的情况下,进行目标停车车位选择处理。首先,通过距离计算部231计算本车辆的位置与各个可停车停车车位的位置之间的距离(步骤ST214),接着,将距本车辆的距离最小的可停车停车车位选择为目标停车车位(步骤ST215)。若选择目标停车车位,则通过显示部180来更新显示装置181上显示的显示画面(步骤ST116)。
步骤ST117以后与实施方式1相同,因此省略说明。
根据实施方式2,能获得与实施方式1相同的效果。
实施方式3.
以下,基于图10及图11对实施方式3进行说明。此外,对于与图1至图9相同或相当的部位使用相同的标号,除非特别需要,否则省略说明。图10是表示实施方式3中的停车辅助装置30的结构的框图。330是目标停车车位选择部,根据用户指定的选择条件从可停车停车车位中选择目标停车车位。另外,在实施方式3中,作为用户的喜好信息输入“在停车辅助时,希望停在出库完成为止所花费的时间最短的停车车位”。因此,目标停车车位的选择条件为“出库所需时间最短”。
停车辅助装置30包括出口检测部315,该出口检测部315检测停车场的出口,并获取其位置信息。出口检测部315在根据用户设定存储部111的用户信息判定为需要停车场的与出口相关的信息的情况下启动,根据摄像头161拍摄到的周边图像和从外部信息接收部162获取到的本车辆周边的地图信息来检测停车场的出口,并获得其位置信息。此外,在有多个出口的情况下,从哪个出口出库可以利用用户设定信息来指定。此外,用户设定信息中可以包含出口的位置信息。
目标停车车位选择部330从可停车停车车位存储部123获取可停车停车车位的信息,并且从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“距本车辆的停止位置的距离最小”这一选择条件,并根据该选择条件来选择目标停车车位。
目标停车车位选择部330包括出库所需时间计算部331,该出库所需时间计算部331计算为了将停车中的本车辆从停车场出库而所需的出库所需时间。出库所需时间计算部331从出口检测部315获取停车场的出口的位置信息,针对存储于可停车停车车位存储部123的一个以上的可停车停车车位分别计算出库所需时间。出库所需时间能够通过将从对象的可停车停车车位出库为止的预想路径的长度除以出库动作中的本车辆的预想速度来计算。可以根据对象的可停车停车车位的位置、朝向和出口的位置来设定预想路径。预想速度可以通过用户设定部110由用户指定,也可以基于过去的出库动作中的平均速度来决定预想速度。目标停车车位选择部330根据目标停车车位的选择条件,将出库所需时间最短的可停车停车车位设定为目标停车车位。
其他结构与实施方式1相同。
接着,对动作进行说明。图11是表示实施方式3中的停车辅助方法的流程图。实施方式3中的停车辅助方法与实施方式1相同,包含“用户设定处理”和“停车辅助处理”。另外,停车辅助处理包含“车位/出口搜索处理”、“目标停车车位选择处理”、“停车操作辅助开始判定处理”以及“停车操作辅助处理”,在这一点上也与实施方式1相同。首先,从用户接受“想要停在出库完成为止所花费的时间最短的停车车位”这一喜好信息、和其他与停车相关的条件的输入(步骤ST101),作为用户设定信息,存储于用户设定存储部111(步骤ST102),结束用户设定处理。
停车辅助处理在用户设定处理结束后,在用户驾驶本车辆时执行。首先,对车辆是否到达停车场内或停车场附近并低速行驶进行判定(步骤ST111),在本车辆没有在停车场内或停车场附近低速行驶的情况下,通过动作解除部190进行动作解除处理(步骤ST120)。
在本车辆在停车场内或停车场附近低速行驶的情况下,使显示装置181显示显示画面900A,并且通过停车车位搜索部120和出口检测部315进行停车车位/出口搜索处理(步骤ST312)。停车车位/出口搜索处理是对实施方式1中说明的停车车位搜索处理追加了停车场出口的检测而的得到的,停车车位搜索处理的内容与实施方式1相同。另外,如上所述,使用摄像头161拍摄到的周边图像以及从外部信息接收部162获取到的本车辆周边的地图信息来检测出口。
在停车车位搜索处理结束后,通过目标停车车位选择部330对在可停车停车车位存储部123中是否存储有1个以上的可停车停车车位的信息进行判定(步骤ST113),在完全没有存储可停车停车车位的情况下前进至步骤ST120,进行动作解除处理。
在存储有1个以上可停车停车车位的情况下,进行目标停车车位选择处理。首先,通过出库所需时间计算部331计算各个可停车停车车位的出库所需时间(步骤ST314),接着,选择出库所需时间最短的可停车停车车位作为目标停车车位(步骤ST315)。若选择目标停车车位,则通过显示部180来更新显示装置181上显示的显示画面(步骤ST116)。由此,显示图3所示的显示画面900B。实施方式3中,选择出库所需时间最短的可停车停车车位,因此强调显示可停车停车车位912。
步骤ST117以后与实施方式1相同,因此省略其说明。
根据实施方式3,能获得与实施方式1相同的效果。
实施方式4.
以下,基于图12及图13对实施方式4进行说明。此外,对于与图1至图11相同或相当的部位使用相同的标号,除非特别需要,否则省略说明。图12是表示实施方式4中的停车辅助装置40的结构的框图。430是目标停车车位选择部,根据用户指定的选择条件从可停车停车车位中选择目标停车车位。另外,在实施方式4中,作为用户的喜好信息输入“在停车辅助时,希望停在停车完成后的下车空间最宽的停车车位。因此,目标停车车位的选择条件为“停车剩余车位最大”。
目标停车车位选择部430从可停车停车车位存储部123获取可停车停车车位的信息,并且从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“停车剩余车位最大”这一选择条件,并根据该选择条件来选择目标停车车位。
目标停车车位选择部430包括停车剩余车位计算部431,该停车剩余车位计算部431计算停车剩余车位。停车剩余车位计算部431从用户设定存储部111获取本车辆的宽度,针对存储于可停车停车车位存储部123的一个以上的可停车停车车位分别计算停车剩余车位。停车剩余车位可以通过获得对象的可停车停车车位的宽度与本车辆的宽度之差来计算。此外,也可以考虑停在本车辆两侧的其他车辆可能会移动,来校正停车剩余车位。目标停车车位选择部430根据目标停车车位的选择条件,将停车剩余车位最大的可停车停车车位设定为目标停车车位。
其他结构与实施方式1相同。
接着,对动作进行说明。图13是表示实施方式4中的停车辅助方法的流程图。实施方式3中的停车辅助方法与实施方式1相同,包含“用户设定处理”和“停车辅助处理”。另外,停车辅助处理包含“停车车位搜索处理”、“目标停车车位选择处理”、“停车操作辅助开始判定处理”以及“停车操作辅助处理”,在这一点上也与实施方式1相同。首先,从用户接受“想要停在停车完成后的下车空间最宽的停车车位”这一喜好信息、和其他与停车相关的条件的输入(步骤ST101),作为用户设定信息,存储于用户设定存储部111(步骤ST102),结束用户设定处理。
停车辅助处理在用户设定处理结束后,在用户驾驶本车辆时执行。首先,对车辆是否到达停车场内或停车场附近并低速行驶进行判定(步骤ST111),在本车辆没有在停车场内或停车场附近低速行驶的情况下,通过动作解除部190进行动作解除处理(步骤ST120)。
在本车辆在停车场内或停车场附近低速行驶的情况下,使显示装置181显示显示画面900A,并且通过停车车位搜索部120进行停车车位搜索处理(步骤ST112)。实施方式4的停车车位搜索处理与实施方式1相同,因此省略其说明。
在停车车位搜索处理结束后,通过目标停车车位选择部430对在可停车停车车位存储部123中是否存储有1个以上的可停车停车车位的信息进行判定(步骤ST113),在完全没有存储可停车停车车位的情况下前进至步骤ST120,进行动作解除处理。
在存储有1个以上可停车停车车位的情况下,进行目标停车车位选择处理。首先,通过停车剩余车位计算部431计算各个可停车停车车位的停车剩余车位(步骤ST414),接着,选择停车剩余车位最大的可停车停车车位作为目标停车车位(步骤ST415)。若选择目标停车车位,则通过显示部180来更新显示装置181上显示的显示画面(步骤ST116)。由此,显示图3所示的显示画面900B。实施方式4中,选择停车剩余车位最大的可停车停车车位,因此强调显示可停车停车车位913。
步骤ST117以后与实施方式1相同,因此省略说明。
根据实施方式4,能获得与实施方式1相同的效果。
实施方式5.
以下,基于图14至图16对实施方式5进行说明。此外,对于与图1至图13相同或相当的部位使用相同的标号,除非特别需要,否则省略说明。图14是表示实施方式5中的停车辅助装置50的结构的框图。520是停车车位搜索部,对本车辆周边的可停车停车车位进行搜索。530是目标停车车位选择部,根据用户指定的选择条件从可停车停车车位中选择目标停车车位。在实施方式5中,作为用户的喜好信息,输入“想将本车辆停在残疾人优先停车车位或其附近”。另外,与实施方式2相同,输入“在停车辅助时,希望将本车辆停在距本车辆的停止位置最近的停车车位”。因此,目标停车车位的选择条件为“残疾人优先停车车位或其附近”以及“距本车辆的停止位置的距离最小”。
停车车位搜索部520包括:对本车辆周边的停车车位进行检测的停车车位检测部521;对停在停车车位检测部521检测出的停车车位的其他车辆进行检测的停车车辆检测部522;以及可停车停车车位存储部523,该可停车停车车位存储部523存储停车车位检测部521检测出的停车车位中没有被停车车辆检测部522检测出有停车中的其他车辆的停车车位的信息。另外,停车车位搜索部520包括空闲停车车位检测部524,该空闲停车车位检测部524通过停车车辆检测部522检测停车中的其他车辆,对于不能停本车辆的停车车位,对其附近有无障碍物进行检测,从而检测空闲停车车位。
停车车位检测部521与实施方式1的停车车位检测部121相同,使用摄像头161拍摄到的周边图像、以及外部信息接收部162获取的本车辆周边的地图信息以及本车辆的位置信息等,来搜索、检测本车辆周边的停车车位。另外,停车车位检测部521从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“残疾人优先车位或其附近”这一选择条件,并根据该选择条件仅对残疾人优先停车车位进行检测。从检测到的停车车位的图像信息中,通过图形匹配来对在停车车位内绘制的残疾人优先标记或所揭示的残疾人优先标记进行检测,从而识别停车车位是否是残疾人优先停车车位。另外,也可以从外部信息接收部162获取残疾人优先停车车位的位置信息,并使用该位置信息来识别是否是残疾人优先停车车位。停车车位检测部521将检测出的残疾人优先停车车位的信息输出至停车车辆检测部522、可停车停车车位存储部523以及空闲停车车位检测部524。
停车车辆检测部522与实施方式1的停车车辆检测部122相同,对停车车位检测部521检测出的停在残疾人车位中的停车车辆进行检测。
空闲停车车位检测部524对通过停车车辆检测部522检测出有停车中的其他车辆的残疾人优先停车车位的附近有无障碍物进行检测,从而检测空闲车位。使用摄像头161拍摄到的周边图像以及外部信息接收部162获取的本车辆周边的地图信息和本车辆的位置信息等,进行空闲车位的检测。根据用户设定信息预先设定空闲停车车位检测部524所进行的空闲停车车位的检测范围。实施方式5中,作为一个示例,将以对象的停车车位为中心的5m以内设为空闲车位的检测范围。
可停车停车车位存储部523从停车车位检测部521获取残疾人优先停车车位的信息,并且参照停车车辆检测部522所进行的停车车辆的检测结果,仅将检测出的残疾人优先停车车位中能停本车辆的停车车位存储为可停车停车车位。另外,空闲停车车位检测部524检测出的空闲停车车位也存储为可停车停车车位。由此,在可停车停车车位存储部523中,将可停车的残疾人优先停车车位以及不能停车的残疾人优先停车车位附近的空闲停车车位存储为可停车停车车位。
目标停车车位选择部530从可停车停车车位存储部523获取可停车停车车位的信息,并且从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“距本车辆的停止位置的距离最小”这一选择条件,并根据该选择条件来选择目标停车车位。
目标停车车位选择部530包括距离计算部531。距离计算部531与实施方式2的距离计算部231相同,针对存储于可停车停车车位存储部523的一个以上的可停车停车车位分别计算距本车辆的距离,目标停车车位选择部530根据目标停车车位的选择条件,将距本车辆的停止位置的距离最小的可停车停车车位设定为目标停车车位。
其他结构与实施方式1相同。
接着,对动作进行说明。图15是表示实施方式5中的停车辅助方法的流程图,图16是表示实施方式5所涉及的停车车位搜索处理的流程图。实施方式5中的停车辅助方法与实施方式1相同,包含“用户设定处理”和“停车辅助处理”。另外,停车辅助处理包含“停车车位搜索处理”、“目标停车车位选择处理”、“停车操作辅助开始判定处理”以及“停车操作辅助处理”,在这一点上也与实施方式1相同。首先,从用户接受“想要将本车辆停在残疾人优先停车车位或其附近”、“想要将本车辆停在距本车辆的停止位置最近的停车车位”的喜好信息、和其他与停车相关的条件的输入(步骤ST101),作为用户设定信息存储于用户设定存储部111(步骤ST102),结束用户设定处理。
停车辅助处理在用户设定处理结束后,在用户驾驶本车辆时执行。首先,对车辆是否到达停车场内或停车场附近并低速行驶进行判定(步骤ST111),在本车辆没有在停车场内或停车场附近低速行驶的情况下,通过动作解除部190进行动作解除处理(步骤ST120)。
在本车辆在停车场内或停车场附近低速行驶的情况下,使显示装置181显示显示画面900A,并且通过停车车位搜索部520进行残疾人优先停车车位搜索处理(步骤ST512)。在残疾人优先停车车位位搜索处理中,首先,通过停车车位检测部521搜索本车辆周边的残疾人优先停车车位(步骤ST5121)。进行搜索的范围基于用户设定信息来决定。例如,设定为以本车辆为中心在5m以内进行搜索。搜索结束后,对是否检测到残疾人优先停车车位进行判定(步骤ST5122),在完全没有检测到的情况下,结束处理。
在检测到残疾人优先停车车位的情况下,通过停车车辆检测部522对其他车辆是否停在检测出的残疾人优先停车车位上进行判定(步骤ST5123)。在没有停其他车辆的情况下,将检测出的残疾人优先停车车位作为可停车停车车位,将该信息存储于可停车停车车位存储部123(步骤ST5124),并结束处理。
在步骤ST5123中停有其他车辆的情况下,通过空闲停车车位检测部524边检测停有其他车辆的残疾人优先停车车位的附近有无障碍物,边搜索空闲车位(步骤ST5125)。搜索后,对是否检测出空闲停车车位进行判定(步骤ST5126),在没有检测出的情况下结束处理。在检测出的情况下,将检测出的空闲停车车位作为可停车停车车位,将该信息存储于可停车停车车位存储部123(步骤ST5127),并结束处理。
在步骤ST5121中检测到多个残疾人优先停车车位的情况下,对于各个残疾人优先停车车位执行步骤ST5123至步骤ST5127。另外,在步骤ST5126中检测到多个空闲停车车位的情况下,在步骤ST5127中将检测到的所有空闲停车车位存储为可停车停车车位。由此,搜索结束时所有可停车停车车位的信息被存储于可停车停车车位存储部123。
在车位搜索处理结束后,通过目标停车车位选择部530对在可停车停车车位存储部523中是否存储有1个以上的可停车停车车位的信息进行判定(步骤ST113),在完全没有存储可停车停车车位的情况下前进至步骤ST120,进行动作解除处理。
在存储有1个以上可停车停车车位的情况下,进行目标停车车位选择处理。首先,通过距离计算部531计算本车辆的位置与各个可停车停车车位的位置之间的距离(步骤ST514),接着,将距本车辆的距离最小的可停车停车车位选择为目标停车车位(步骤ST515)。若选择目标停车车位,则通过显示部180来更新显示装置181上显示的显示画面(步骤ST116)。
步骤ST117以后与实施方式1相同,因此省略其说明。
根据实施方式5,能获得与实施方式1相同的效果。
另外,由于在停车车位检测部识别残疾人优先停车车位,因此也能够应对用户希望残疾人优先停车车位的情况。
另外,在实施方式5中,为了在检测到多个残疾人优先停车车位的情况下选择目标停车车位,与实施方式2相同地构成为距本车辆的距离最小,但并不限于此,也可以与实施方式1、3、4相同地来选择目标停车车位。
实施方式6.
以下,基于图17至图19对实施方式6进行说明。此外,对于与图1至图16相同或相当的部位使用相同的标号,除非特别需要,否则省略说明。图17是表示实施方式6中的停车辅助装置的结构的框图。620是停车车位搜索部,对本车辆周边的可停车停车车位进行搜索。630是目标停车车位选择部,根据用户指定的选择条件从可停车停车车位中选择目标停车车位。实施方式6中,作为用户的喜好信息输入“想将本车辆停在距目的地的建筑物(目的地建筑物)”的入口最近的停车车位或其附近”。由此,目标停车车位的选择条件为“距目的地建筑物入口的距离最小或其附近”。
停车辅助装置60包括目的地建筑物检测部615,该目的地建筑物检测部615获取目的地建筑物的入口的位置信息。目的地建筑物检测部615在根据用户设定存储部111的用户信息判定为需要与目的地建筑物相关的信息的情况下启动,根据摄像头161拍摄到的周边图像和从外部信息接收部162获取到的本车辆周边的地图信息来检测目的地建筑物的入口,并获得其位置信息。此外,在目的地建筑物的入口有多个的情况下,包含哪个入口在内,只要利用用户设定信息来进行指定即可。另外,用户设定信息中可以包含目的地建筑物的入口的位置信息。
停车车位搜索部620包括:对目的地建筑物周边的停车车位进行检测的停车车位检测部621;对停在停车车位检测部621检测出的停车车位的其他车辆进行检测的停车车辆检测部622;以及可停车车位存储部623,该可停车车位存储部623存储停车车位检测部621检测出的停车车位中没有被停车车辆检测部622检测出有停车中的其他车辆的停车车位的信息。另外,停车车位搜索部620包括空闲停车车位检测部624,该空闲停车车位检测部624通过停车车辆检测部622检测停车中的其他车辆,对于不能停本车辆的停车车位,对其附近有无障碍物进行检测,从而检测空闲停车车位。
停车车位检测部621从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息获取用户指定的目的地建筑物的信息。获取到目的地建筑物的信息的停车车位检测部621使用摄像头161拍摄到的周边图像、以及外部信息接收部162获取的本车辆周边的地图信息和本车辆的位置信息等,搜索、检测目的地建筑物周边的停车车位。停车车位检测部521将检测出的停车车位的信息输出至停车车辆检测部622、可停车停车车位存储部623以及空闲停车车位检测部624。
停车车辆检测部622与实施方式1的停车车辆检测部122相同,对停车车位检测部621检测出的停在停车车位上的停车车辆进行检测。
空闲停车车位检测部624对通过停车车辆检测部622检测出有停车中的其他车辆的停车车位的附近有无障碍物进行检测,从而检测空闲停车车位。使用摄像头161拍摄到的周边图像以及外部信息接收部162获取的本车辆周边的地图信息和本车辆的位置信息等,进行空闲停车车位的检测。根据用户设定信息设定空闲停车车位检测部624所进行的空闲停车车位的搜索范围。实施方式6中,作为一个示例,将以对象的停车车位为中心的周围5m以内设为空闲停车车位的检测范围。
可停车停车车位存储部623从停车车位检测部621获取停车车位信息,并且参照停车车辆检测部622所进行的停车车辆的检测结果,仅将检测出的停车车位中能停本车辆的停车车位存储为可停车停车车位。另外,空闲停车车位检测部624检测出的空闲停车车位也存储为可停车停车车位。由此,在可停车停车车位存储部623中,将可停车的停车车位以及不能停车的停车车位附近的空闲停车车位存储为可停车停车车位。
目标停车车位选择部630从可停车停车车位存储部623获取可停车停车车位的信息,并且从用户设定存储部111获取用户的喜好信息,根据获取到的喜好信息设定“距目的地建筑物的入口的距离最小”这一选择条件,并根据该选择条件来选择目标停车车位。
目标停车车位选择部630包括距离计算部631,该距离计算部631计算距目的地建筑物的入口的距离。距离计算部631从目的地建筑物检测部615获取目的地建筑物的入口的位置信息,针对存储在可停车停车车位存储部623中的一个以上的可停车停车车位分别计算距目的地建筑物的入口的距离。目标停车车位选择部630根据目标停车车位的选择条件,将距目的地建筑物的入口的距离最小的可停车停车车位设定为目标停车车位。
接着,对动作进行说明。图18是表示实施方式6中的停车辅助方法的流程图,图19是表示实施方式6所涉及的停车车位搜索处理的流程图。实施方式6中的停车辅助方法与实施方式1相同,包含“用户设定处理”和“停车辅助处理”。另外,停车辅助处理包含“停车车位搜索处理”、“目标停车车位选择处理”、“停车操作辅助开始判定处理”以及“停车操作辅助处理”,在这一点上也与实施方式1相同。首先,从用户接受“想要将本车辆停在与(目的地建筑物)的入口最近的停车车位或其附近”这一喜好信息、和其他与停车相关的条件的输入(步骤ST101),作为用户设定信息,存储于用户设定存储部111(步骤ST102),结束用户设定处理。
停车辅助处理在用户设定处理结束后,在用户驾驶本车辆时执行。首先,对车辆是否到达停车场内或停车场附近并低速行驶进行判定(步骤ST111),在本车辆没有在停车场内或停车场附近低速行驶的情况下,通过动作解除部190进行动作解除处理(步骤ST120)。
在本车辆在停车场内或停车场附近低速行驶的情况下,使显示装置181显示显示画面900A,并且通过目的地建筑物检测部615和停车车位搜索部620进行停车车位搜索处理(步骤ST612)。停车车位搜索处理中,首先,通过目的地建筑物检测部615对目的地建筑物的入口进行检测,获取其位置信息(步骤ST6120)。接着,通过停车车位检测部621搜索目的地建筑物周边的停车车位(步骤ST6121)。进行搜索的范围基于用户设定信息来决定。例如,设定为在以本车辆为中心的5m以内进行搜索。搜索结束后,对是否检测到停车车位进行判定(步骤ST6122),在完全没有检测到的情况下,结束处理。
在检测到停车车位的情况下,通过停车车辆检测部622对其他车辆是否停在检测出的停车车位上进行判定(步骤ST6123)。在没有停其他车辆的情况下,将检测出的停车车位作为可停车停车车位,将该信息存储于可停车停车车位存储部623(步骤ST6124),并结束处理。
在步骤ST6123中停有其他车辆的情况下,通过空闲停车车位检测部624边检测停有其他车辆的残疾人优先停车车位的附近有无障碍物,边搜索空闲停车车位(步骤ST6125)。搜索后,对是否检测出空闲停车车位进行判定(步骤ST6126),在没有检测出的情况下结束处理。在检测出的情况下,将检测出的空闲停车车位作为可停车停车车位,将该信息存储于可停车停车车位存储部123(步骤ST6127),并结束处理。
在步骤ST6121中检测到多个停车车位的情况下,对于各个停车车位执行步骤ST6123至步骤ST6127。另外,在步骤ST6126中检测到多个空闲停车车位的情况下,在步骤ST6127中将检测到的所有空闲停车车位存储为可停车停车车位。由此,搜索结束时所有可停车停车车位的信息被存储于可停车停车车位存储部123。
在停车车位搜索处理结束后,通过目标停车车位选择部630对在可停车停车车位存储部623中是否存储有1个以上的可停车停车车位的信息进行判定(步骤ST113),在完全没有存储可停车停车车位的情况下前进至步骤ST120,进行动作解除处理。
在存储有1个以上可停车停车车位的情况下,进行目标停车车位选择处理。首先,通过距离计算部631计算目的地建筑物的入口的位置与各个可停车停车车位的位置之间的距离(步骤ST614),接着,将距目的地建筑物的入口的距离最小的可停车停车车位选择为目标停车车位(步骤ST615)。若选择目标停车车位,则通过显示部180来更新显示装置181上显示的显示画面(步骤ST116)。
步骤ST117以后与实施方式1相同,因此省略说明。
根据实施方式6,能获得与实施方式1相同的效果。
虽然本申请记载了各种示例性实施方式和实施例,但是在一个或多个实施方式中记载的各种特征、方式和功能不限于特定实施方式的应用,可以单独地或以各种组合来应用于实施方式。
因此,在本申请所公开的技术范围内可以设想无数未举例示出的变形例。例如,假设包括对至少一个构成要素进行变形、添加或省略的情况,以及提取至少一个构成要素并与其他实施方式的构成要素进行组合的情况。
标号说明
10、20、30、40、50、60 停车辅助装置
110 用户设定部
111 用户设定存储部
120、520、620 停车停车车位搜索部
121、521、621 停车车位检测部
122、522、622 停车车辆检测部
123、523、623 可停车停车车位存储部
130、230、330、430、530、630 目标停车车位选择部
131 停车所需时间计算部
231、531、631 距离计算部
331 出库所需时间计算部
431 停车剩余车位计算部
140 停车操作辅助开始判定部
150 停车操作辅助部
161 摄像头
162 外部信息接收部
180 显示部
181 显示装置
190 动作解除部
315 输出检测部
524、624 空停车车位检测部
615 目的地建筑物检测部
821 输入装置
822 GPS装置
900A、900B、900C 显示画面
901 本车辆
902 其他车辆
903 障碍物
911~914 可停车停车车位
920 预想停车路径
- 停车辅助装置、停车辅助装置部件、停车辅助方法、停车辅助程序、行车参数的计算方法和计算程序、行车参数计算装置以及行车参数计算装置部件
- 停车辅助装置、停车辅助方法以及停车辅助程序