一种空气炮驱鸟监测系统
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及涉及驱鸟技术领域,具体涉及一种空气炮驱鸟监测系统。
背景技术
电力系统输电线路由于架设的范围非常广阔,在一些鸟害重灾区,特别容易受到鸟类活动的影响。鸟类在线路及杆塔上排便容易引起线路短路,跳闸的危害;鸟啄绝缘器件容易使绝缘器件损坏,导致绝缘电压不足。传统用于驱鸟的空气炮往往存在精度不高的情况。
发明内容
本发明提供一种空气炮驱鸟监测系统,用于提高使用空气炮驱鸟时的精度。
本发明通过下述技术方案实现:
一种空气炮驱鸟监测系统,包括空气炮、多普勒雷达、视频监视器、风速测量器和终端控制器,所述空气炮设置有无线接收器a,所述多普勒雷达安装在空气炮上,所述多普勒雷达连接到无线接收器a,所述终端控制器设置有无线接收器b,所述无线接收器b接收和记录多普勒雷达、视频监视器和风速测量器的信息并且控制空气炮的发射,所述多普勒雷达检测鸟的飞行距离,所述视频监视器检测鸟的种类和飞行状态,所述风速测量器检测环境的风速;
所述终端控制器通过多普勒雷达、视频监视器和风速测量器的信息控制空气炮时,需要判断何时开炮:所述视频监视器判定鸟类飞行状态为慢速或者静止时,G1=1,判定鸟类飞行状态为快速飞行状态时,G1=0;所述风速测量器判定风速为慢速或者静止时,G2=1,判定风速为快速时,G2=0;所述多普勒雷达监测来鸟距离空气炮的距离D小于dn时,G3=1,否则G3=0;当空气炮接受信号G1=1、G2=1、G3=1时,空气炮发射,否者空气炮不发射。
进一步,所述系统具体包括以下步骤:
S1、所述多普勒雷达进行监测,当有鸟类靠近系统的驱逐范围,发送储能信号给空气炮,空气炮储能;
S2、所述视频监视器根据图像库中的图像分析判定不同种类的鸟,记录其种类值n,当来鸟为第n类鸟记为Sn,空气炮有效发射距离为dn,其中n=1,2,3,4…;
S3、在所述终端控制器中,视频监视器判定鸟类飞行状态为慢速或者静止时,G1=1,判定鸟类飞行状态为快速飞行状态时,G1=0;所述风速测量器判定风速为慢速或者静止时,G2=1,判定风速为快速时,G2=0;所述多普勒雷达监测来鸟距离空气炮的距离D小于dn时,G3=1,否则G3=0;当空气炮接受信号G1=1、G2=1、G3=1时,所述终端控制器控制空气炮发射,否者空气炮不发射;
S4、所述多普勒雷达监测空气炮发射后驱逐的效果,成功驱逐来鸟时,G4=1,未能驱逐来鸟时,G4=0;G4=1时,增大射程范围,dn=dn+Δd;G1=0时,发射无效,需要减小射程范围,dn=dn-Δd;
S5、记录第n类鸟新的有效发射距离dn的值后,返回S1。
进一步,所述空气炮的储能时间小于5s。
进一步,S4中的Δd大小为0.5m,在S4中通过不断的调整获得最佳的发射距离。
进一步,所述多普勒雷达内部的调制解调器的脉冲宽度为0.1-4秒。
进一步,所述多普勒雷达的天线仰角变化范围为0.5-45度。
进一步,所述视频监视器的包括红外摄像头,所述红外摄像头转动范围为180度,所述红外摄像头的摄像距离小于多普勒雷达的探测距离,所述红外摄像头的摄像距离大于系统的驱逐范围。
进一步,所述系统还包括散热器。使用散热器防止系统温度过高,有利于系统元件的正常运行。
进一步,所述系统还包括太阳能电池,所述太阳能电池采用碲锌镉薄膜太阳能电池。将具有渐变带隙结构的Cd1-xZnxTe多晶薄膜作为太阳能电池的吸收层,大大加宽了太阳光的光谱吸收范围,提高了太阳光谱的利用效率。
本发明与现有技术相比,具有如下的优点和有益效果:
本发明控制空气炮发射过程中需要处理多普勒雷达、视频监视器和风速测量器的信息,对于来鸟的飞行距离、鸟的种类、飞行状态和环境的风速进行综合处理,减小空气炮发射时的误差,并且通过Δd不断调节,能够提高使用空气炮驱鸟时的精度。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
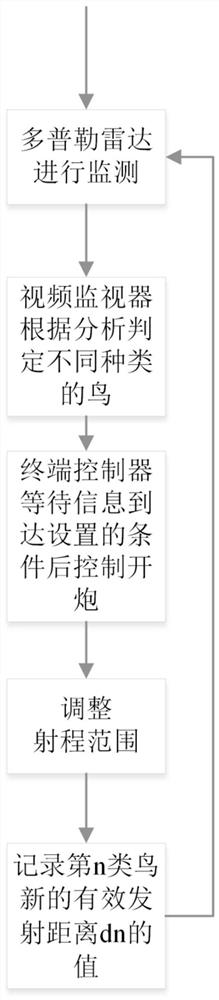
图1为本发明流程示意图;
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
实施例1:
一种空气炮驱鸟监测系统,包括空气炮、多普勒雷达、视频监视器、风速测量器和终端控制器,所述空气炮设置有无线接收器a,所述多普勒雷达安装在空气炮上,所述多普勒雷达连接到无线接收器a,所述终端控制器设置有无线接收器b,所述无线接收器b接收和记录多普勒雷达、视频监视器和风速测量器的信息并且控制空气炮的发射,所述多普勒雷达检测鸟的飞行距离,所述视频监视器检测鸟的种类和飞行状态,所述风速测量器检测环境的风速;
所述终端控制器通过多普勒雷达、视频监视器和风速测量器的信息控制空气炮时,需要判断何时开炮:所述视频监视器判定鸟类飞行状态为慢速或者静止时,G1=1,判定鸟类飞行状态为快速飞行状态时,G1=0;所述风速测量器判定风速为慢速或者静止时,G2=1,判定风速为快速时,G2=0;所述多普勒雷达监测来鸟距离空气炮的距离D小于dn时,G3=1,否则G3=0;当空气炮接受信号G1=1、G2=1、G3=1时,空气炮发射,否者空气炮不发射。
由图1所示:
所述系统具体包括以下步骤:
S1、所述多普勒雷达进行监测,当有鸟类靠近系统的驱逐范围,发送储能信号给空气炮,空气炮储能;
S2、所述视频监视器根据图像库中的图像分析判定不同种类的鸟,记录其种类值n,当来鸟为第n类鸟记为Sn,空气炮有效发射距离为dn,其中n=1,2,3,4…;
S3、在所述终端控制器中,视频监视器判定鸟类飞行状态为慢速或者静止时,G1=1,判定鸟类飞行状态为快速飞行状态时,G1=0;所述风速测量器判定风速为慢速或者静止时,G2=1,判定风速为快速时,G2=0;所述多普勒雷达监测来鸟距离空气炮的距离D小于dn时,G3=1,否则G3=0;当空气炮接受信号G1=1、G2=1、G3=1时,所述终端控制器控制空气炮发射,否者空气炮不发射;
S4、所述多普勒雷达监测空气炮发射后驱逐的效果,成功驱逐来鸟时,G4=1,未能驱逐来鸟时,G4=0;G4=1时,增大射程范围,dn=dn+Δd;G1=0时,发射无效,需要减小射程范围,dn=dn-Δd;
S5、记录第n类鸟新的有效发射距离dn的值后,返回S1。
所述空气炮的储能时间为2s。
S4中的Δd大小为0.5m,在S4中通过不断的调整获得最佳的发射距离。
所述多普勒雷达内部的调制解调器的脉冲宽度为1.2秒。
所述多普勒雷达的天线仰角变化范围为35度。
所述视频监视器的包括红外摄像头,所述红外摄像头转动范围为180度,所述红外摄像头的摄像距离小于多普勒雷达的探测距离,所述红外摄像头的摄像距离大于系统的驱逐范围。
所述系统还包括散热器。使用散热器防止系统温度过高,有利于系统元件的正常运行。
所述系统还包括太阳能电池,所述太阳能电池采用碲锌镉薄膜太阳能电池。将具有渐变带隙结构的Cd1-xZnxTe多晶薄膜作为太阳能电池的吸收层,大大加宽了太阳光的光谱吸收范围,提高了太阳光谱的利用效率。
本实施例控制空气炮发射过程中需要处理多普勒雷达、视频监视器和风速测量器的信息,对于来鸟的飞行距离、鸟的种类、飞行状态和环境的风速进行综合处理,减小空气炮发射时的误差,并且通过Δd不断调节,能够提高使用空气炮驱鸟时的精度。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种空气炮驱鸟监测系统
- 一种驱鸟用的空气炮装置及其系统