一种AGV车
文献发布时间:2023-06-19 10:11:51
技术领域
本发明申请涉及AGV技术,尤其涉及一种AGV车。
背景技术
AGV是Automated Guided Vehicle的简称,也称AGV车,因为AGV在应用中不需要人工操作且自动运行,所以AGV运行中的安全保障功能尤为重要。目前市面上生产的许多AGV车采用防撞系统来进行安全防护,现有防撞系统通常为机械接触式或激光、红外检测防撞装置。无论是机械接触式,还是激光、红外检测防撞装置,都存在着对垂直方向(Z轴)的障碍物缺乏检测的问题,无法覆盖悬空或者低矮障碍物检测;经.常造成严重地碰撞,威胁设备和人员的安全,对使用者造成不便。
发明内容
本申请实施例在于提出一种AGV车,解决现有技术对垂直方向障碍物缺乏检测的问题。
本申请公开了一种AGV车,包括:车体、控制装置、与控制装置连接的障碍检测装置,所述的障碍检测装置为3D激光雷达,设置在车体前端,在AGV车前方形成一3D检测区域,3D检测区域覆盖车前方范围。
在一种可能的实现方式中,所述的3D检测区域包括第一警告区、第二警告区、第三警告区,所述的第三警告区为以激光雷达为中心的3D区域,所述的第二警告区设置在第三警告区外围,所述的第一警告区设置在第二警告区外围。
在一种可能的实现方式中,所述的第三警告区的边界为长0.3-0.5m,宽0.3-1m,高为tan4.5°*2*长度。
在一种可能的实现方式中,所述的第二警告区的边界为长0.5-1.5m,宽0.3-1m,高为tan4.5°*2*长度。
在一种可能的实现方式中,所述的第一警告区的边界为长1.5-2m,宽0.3-1m,高为tan4.5°*2*长度。
在一种可能的实现方式中,所述的AGV车,还包括报警装置,所述的报警装置包括警示灯、蜂鸣器。
在一种可能的实现方式中,所述第一警告区检测到障碍物时,所述控制装置控制报警装置报警。
在一种可能的实现方式中,所述第二警告区检测到障碍物时,所述控制装置控制报警装置报警,控制车体减速。
在一种可能的实现方式中,所述第三警告区检测到障碍物时,所述控制装置控制报警装置报警,控制车体急停。
在一种可能的实现方式中,所述3D激光雷达具有自适应功能和环境适应功能 。
本申请采用3D激光雷达扫描探测AGV前方固定距离的3D区域,除了对水平位置上的障碍物进行检测外,对垂直方向(Z轴)的障碍物也能检测,可以及时发现悬空或者低矮障碍物,避免因碰到垂直方向上的障碍物,造成的碰撞事故,满足设备和人员的安全安全需要。
附图说明
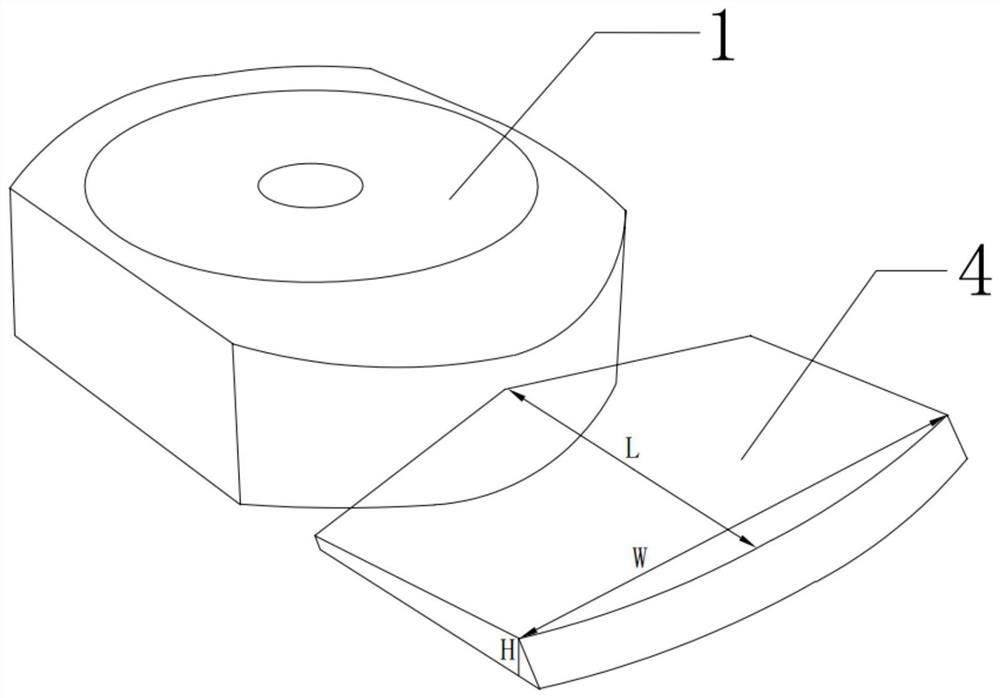
图1是本申请实施例主视图。
图2是本申请实施例俯视图。
图3是本申请实施例模块连接示意图。
图中:1、车体;2、控制装置;3、障碍检测装置;4、3D检测区域;5、第一警告区;6、第二警告区;7、第三警告区;8、障碍物;9、报警装置。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本申请的技术方案。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
本申请实施例
如图1、图3所示,一种AGV车,包括:车体1、控制装置2、与控制装置2连接的障碍检测装置3,所述的障碍检测装置3为3D激光雷达,设置在车体1前端,在AGV车前方形成一3D检测区域4,3D检测区域4覆盖车前方范围。
本实施例采用3D激光雷达扫描探测AGV前方固定距离的3D区域,除了对水平位置上的障碍物8进行检测外,对垂直方向(Z轴)的障碍物8也能检测,可以及时发现悬空或者低矮障碍物8,避免因碰到垂直方向上的障碍物8,造成的碰撞事故,满足设备和人员的安全安全需要。
另外激光雷达受环境的干扰较弱,尤其是光线变化对障碍物探测的准确率几乎没有影响;同时安装方便简洁。
如图2所示,3D检测区域包括第一警告区5、第二警告区6、第三警告区7,所述的第三警告区7为以激光雷达为中心的3D区域,所述的第二警告区6设置在第三警告区7外围,所述的第一警告区5设置在第二警告区6外围。
所述的第三警告区的边界为长0.3-0.5m,宽0.3-1m,高为tan4.5°*2*长度。
所述的第二警告区的边界为长0.5-1.5m,宽0.3-1m,高为tan4.5°*2*长度。
所述的第一警告区的边界为长1.5-2m,宽0.3-1m,高为tan4.5°*2*长度。
参见图2,作为优选方案,所述障碍检测装置3的检测区域外周内设有第一警告区5、第二警告区6、第三警告区7,第一警告区5大于第二警告区6,第二警告区6大于第三警告区7。在不同的警告区检测到障碍物8时,可以采取警告、减速、急停等方式防止车辆撞击障碍物,增加了AGV车的安全性能,同时车体操作更为灵活。
所述的AGV车,还包括报警装置9,所述的报警装置包括警示灯、蜂鸣器。
作为优选方案,所述车体1设有报警装置9,所述障碍检测装置2检测到障碍物时,所述报警装置9发出警报信号,通过这样设置,周边人员通过报警装置9发出提示信号,可提前做出防备。
所述第一警告区5检测到障碍物8时,所述控制装置控制报警装置报警。
当在第一警告区5检测到障碍物8时,障碍物8距AGV车尚有一段距离,通过报警装置9通知周边人员,可由周边人员将障碍物移开或者重新为AGV车规划路线。
所述第二警告区6检测到障碍物8时,所述控制装置2控制报警装置9报警,控制车体1减速。
当在第二警告区6检测到障碍物8时,障碍物8距AGV车较近,除通过报警装置9通知周边人员外,控制装置2控制车体1减速,减小所述车体在第三警告区内的制动距离,有效提高车体安全性能。
所述第三警告区7检测到障碍物8时,所述控制装置2控制报警装置9报警,控制车体1急停。
当在第三警告区7检测到障碍物8时,障碍物8距AGV车很近,易发生碰撞,除通过报警装置9通知周边人员外,控制装置2控制车体1急停,进一步提高车体1安全性能。
所述3D激光雷达具有自适应功能和环境适应功能 。
雷达内置的自适应算法和环境适应算法使其能匹配多种应用环境,自适应算法和环境适应算法为现有技术。
以上结合具体实施例描述了本申请的技术原理。这些描述只是为了解释本申请的原理,而不能以任何方式解释为对本申请保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本申请的其它具体实施方式,这些方式都将落入本申请的保护范围之内。
- 一种用于AGV车的滚筒机构及AGV车
- 一种用于AGV车的称重机构以及AGV车