一种百叶窗出风方向自动调节系统及方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及空调通风系统技术领域,具体地指一种百叶窗出风方向自动调节系统及方法。
背景技术
现有百叶窗通常安装在墙面或风管端部,作为避雨散热或调节气流之用。按照叶片的固定方式分为固定式百叶窗和活动式百叶窗。活动式百叶窗通过改变各叶片设置的角度来改变相邻叶片之间的空隙以调节气流方向。活动式百叶窗根据调节方式又可分手动调节百叶窗和电动调节百叶窗。
在实际工程中,百叶窗通常是气流入口端与风管连接,百叶窗的周向端嵌设固定在墙体上,百叶窗的出口端朝向房间内。由于百叶窗与墙体固定,其出风方向的调节范围有限,只能在有限范围内依靠改变各叶片设置的角度来调节出风方向。这样不可避免的会使房间内出现一定程度的滞流区或者死流区。另外,这种叶片的调节会造成百叶窗出口端的阻力系数改变从而改变出口端气流的风速和流线,很难保证房间内特定的工作区域的风量和风速达到要求。虽然市场上存在部分出风口可转动或摆动的空调出风调节系统,这类系统主要分为两类,第一类调节系统与上述活动式百叶窗相似,通过调节机构改变叶片倾角实现出风方向的调节,这种调节系统的缺陷不再赘述;第二类调节系统是通过调节机构摆动或转动整个百叶窗,使百叶窗的指向方位发生改变,从而实现对出风方向的调节,这类调节系统虽然解决了第一类调节系统存在的问题,但需要为百叶窗提供额外的活动空间,并不适用于百叶窗安装密封性要求较高的室内使用。
特别是在新冠肺炎等重大突发公共卫生事件应急救援的传染病房内,国家规范及标准均要求负压隔离病房新风换气次数不小于12h-1,按此标准,设计新风量500m
发明内容
本发明的目的在于克服现有空调系统的百叶窗无法保证安装密封性的同时使出风方向自动追踪指向房间内人员的问题,提供一种百叶窗出风方向自动调节系统,包括依次连通的风管、波纹软管和百叶窗;还包括:
多普勒雷达传感器,用于感应收集人体在房间内所处位置的范围或坐标信息;
软管调节装置,用于驱动所述波纹软管的至少一个轴向段在径向上位移以调节出风方向;所述软管调节装置包括管连接件及驱动所述管连接件在径向上位移的驱动装置;所述管连接件与所述波纹软管连接;
主控单元,与所述驱动装置和所述多普勒雷达传感器电连接,用于接收和处理所述多普勒雷达传感器的所述范围或坐标信息,并根据处理结果向所述驱动装置发出控制指令,使所述管连接件至所述百叶窗之间的所述波纹软管的几何中心轴指向所述人体在房间内所处位置的范围或坐标。
进一步,所述驱动装置包括固定架、主动轮、从动轮、曲柄和第一电机;所述第一电机驱动所述主动轮转动;所述主动轮的中心轴与所述波纹软管的中心轴平行;所述主动轮同步啮合有至少两个所述从动轮;所述曲柄一端与所述从动轮固定并跟随所述从动轮转动,所述曲柄另一端与设置在所述管连接件上的铰接孔铰接;所述主动轮、从动轮和第一电机与所述固定架连接。
进一步,所述管连接件包括抱箍或连接耳;
所述抱箍同轴套设在所述波纹软管上;所述抱箍沿周向设有至少两个所述铰接孔;
所述连接耳沿所述波纹软管周向设置有至少两个,所述连接耳上设置有所述铰接孔。
进一步,所述风管与所述波纹软管通过第一法兰盘连接;所述波纹软管与所述百叶窗通过第二法兰盘连接。
进一步,所述固定架与所述第一法兰盘连接;所述管连接件位于所述波纹软管靠近所述第一法兰盘的一端。
进一步,所述百叶窗包括窗体和叶片;所述窗体的入口端与所述第二法兰盘连接,所述叶片设于所述窗体内;所述窗体的出口端设有多普勒雷达传感器。
进一步,所述百叶窗还包括叶片调节装置;所述叶片调节装置与所述叶片连接用于调节所述叶片的倾斜角度。
进一步,所述叶片包括由所述窗体入口端至出口端间隔设置的水平叶片和竖直叶片;所述叶片调节装置包括用于调节所述水平叶片的倾斜角度的水平调节装置和用于调节所述竖直叶片的倾斜角度的竖直调节装置;
所述水平调节装置包括水平涡轮、竖直蜗杆和第二电机;所述水平涡轮与所述水平叶片端部连接;所述竖直蜗杆与所述水平涡轮啮合;所述第二电机的转动轴与所述竖直蜗杆连接;
所述竖直调节装置包括竖直涡轮、水平蜗杆和第三电机;所述竖直涡轮与所述竖直叶片的端部连接;所述水平蜗杆与所述竖直涡轮啮合;所述第三电机的转动轴与所述水平蜗杆连接。
本发明百叶窗出风方向自动调节系统的有益效果是:通过多普勒雷达传感器感应收集人体在房间内所处位置的范围或坐标;通过软管调节装置调节波纹软管的几何中心轴,使其指向人体在房间内所处位置的范围或坐标,从而使出风方向自动追踪指向房间内人员,并且百叶窗与墙体的安装面无需设置额外的活动空间,保证百叶窗安装密封性的同时,最大化的保证房间内人体所处位置的风量和风速,并可有效清除房间内的滞流区或死流区。
本发明还提出一种百叶窗出风方向自动调节方法,包括以下步骤:
S1、初始程序处理:主控单元利用机器学习方法,计算得出人体在房间内所处位置在不同的范围或坐标时百叶窗出口端保持指向人体的最大风量及对应的系统调节角度,存储数据;
S2、所述主控单元设置追踪判定时间T及所述百叶窗出口端保持指向人体的最大风量时对应的房间内空间的有效范围M;
S3、所述主控单元实时接收和处理多普勒雷达传感器感应收集的人体在房间内所处位置的范围或坐标P;
S4、当所述范围或坐标P全部未超出所述有效范围M时,进入步骤S5;当所述范围或坐标P至少部分超出所述有效范围M,且持续时间小于所述追踪判定时间T时,进入步骤S5;
当所述范围或坐标P至少部分超出所述有效范围M,且持续时间大于等于所述追踪判定时间T时,进入步骤S6;
S5、所述主控单元调取所述步骤S1存储的数据,向叶片调节装置发出一级追踪指令:使百叶窗的叶片朝所述范围或坐标P倾斜;进入步骤S7;
S6、所述主控单元调取所述步骤S1存储的数据,向软管调节装置发出二级追踪指令:使与所述百叶窗连通的波纹软管的几何中心轴指向所述范围或坐标P;进入步骤S7;
S7、重复步骤S3。
进一步,所述步骤S1的所述主控单元利用机器学习的方法为:所述主控单元建立以百叶窗出口端几何中心为坐标中心的空间坐标系,并以所述多普勒雷达传感器感应收集的人体在房间内所处位置的不同范围或坐标及与该范围或坐标对应的百叶窗出口端指向人体的风量和系统调节角度作为训练样本;
所述系统调节角度包括与百叶窗连通的波纹软管的几何中心轴偏移角度和百叶窗内叶片的倾斜角度;所述百叶窗出口端或所述房间内设置有所述多普勒雷达传感器。
本发明百叶窗出风方向自动调节方法的有益效果是:通过主控单元和多普勒雷达传感器的配合,实现对房间内人员的自动追踪定位;主控单元根据房间内人员所处位置的范围或坐标的不同发出相应的一级追踪指令和二级追踪指令,有效清除房间内滞流区或死流区的同时,使出风方向根据人体所处位置的改变而自动补偿,保证指向人体所处位置的风量和风速最大化。
附图说明
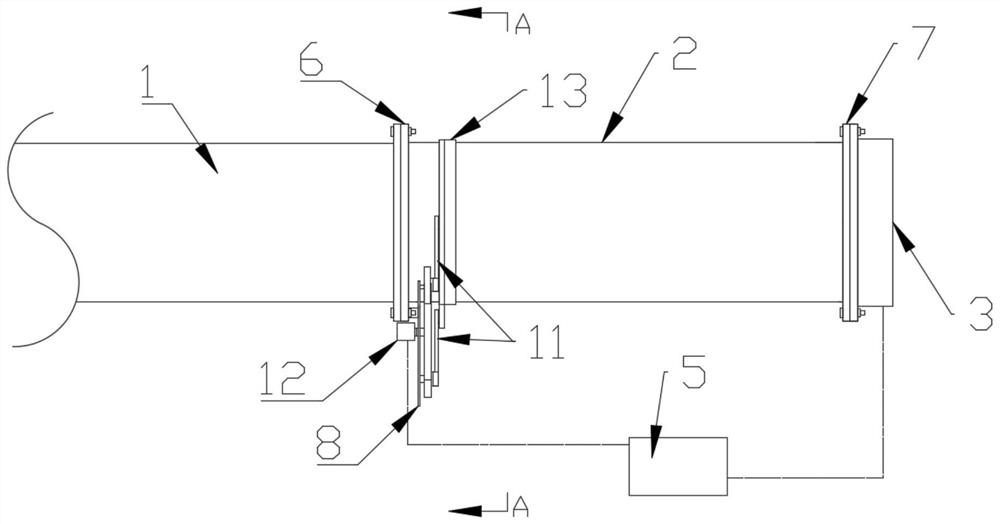
图1为本发明百叶窗出风方向自动调节系统的主视结构示意图。
图2为图1中A-A面的剖视结构示意图。
图3为图2中抱箍位置变化的结构示意图。
图4为图3中抱箍位置进一步变化的结构示意图。
图5为图1中百叶窗的立体结构示意图。
图6为图5中百叶窗内水平调节装置和水平叶片的结构示意图。
图7为图5中百叶窗内竖直调节装置和竖直叶片的结构示意图。
图8为图1中出风方向改变的结构示意图。
图中:风管1、波纹软管2、百叶窗3、窗体3.1、普勒雷达传感器4、主控单元5、第一法兰盘6、第二法兰盘7、固定架8、主动轮9、从动轮10、曲柄11、第一电机12、抱箍13、连接耳14、水平涡轮15、竖直蜗杆16、第二电机17、竖直涡轮18、水平蜗杆19、第三电机20、铰接孔21、水平叶片22、竖直叶片23。
具体实施方式
以下结合附图和具体实施例对本发明作进一步的详细描述。
如图1~8所示的百叶窗出风方向自动调节系统,包括依次连通的风管1、波纹软管2和百叶窗3;还包括多普勒雷达传感器4、软管调节装置和主控单元5。
本实施例的风管1与波纹软管2通过第一法兰盘6连接;波纹软管2与百叶窗3通过第二法兰盘7连接。波纹软管2优选为圆形管体。百叶窗3包括窗体3.1和叶片;窗体3.1的入口端与第二法兰盘7连接,叶片设于窗体3.1内。
多普勒雷达传感器4用于感应收集人体在房间内所处位置的范围或坐标信息;多普勒雷达传感器4可以设置在百叶窗3的出口端,也可以设置在房间内。本实施例中多普勒雷达传感器4优选为设置在百叶窗3的窗体3.1的出口端上,且沿百叶窗3的出口端均匀设置有多个。
软管调节装置,用于驱动波纹软管2的至少一个轴向段在径向上位移以调节出风方向;软管调节装置包括管连接件及驱动管连接件在径向上位移的驱动装置;管连接件与波纹软管2连接;
主控单元5,与驱动装置和多普勒雷达传感器4电连接,用于接收和处理多普勒雷达传感器4的范围或坐标信息,并根据处理结果向驱动装置发出控制指令,使管连接件至百叶窗3之间的波纹软管2的几何中心轴指向人体在房间内所处位置的范围或坐标。
参见图2、图3、图4,驱动装置包括固定架8、主动轮9、从动轮10、曲柄11和第一电机12;第一电机12驱动主动轮9转动;主动轮9的中心轴与波纹软管2的中心轴平行;主动轮9同步啮合有至少两个从动轮10;曲柄11一端与从动轮10固定并跟随从动轮10转动,曲柄11另一端与设置在管连接件上的铰接孔21铰接;主动轮9、从动轮10和第一电机12与固定架8连接。
管连接件包括抱箍13或连接耳14;抱箍13同轴套设在波纹软管2上;抱箍13沿周向设有至少两个铰接孔21;连接耳14沿波纹软管2周向设置有至少两个,连接耳14上设置有铰接孔21。实际中,管连接件可以是抱箍13或连接耳14之一,本实施例中,管连接件为抱箍13和连接耳14,抱箍13先同轴套着在波纹软管2上,连接耳14沿抱箍13周向设置有两个,两个连接耳14处于抱箍13相邻的两个象限点位置。主动轮9设于该两个象限点之间。固定架8与第一法兰盘6连接;管连接件位于波纹软管2靠近第一法兰盘6的一端。
参见图3、图4,主动轮9在第一电机12的驱动作用下转动,与主动轮9啮合的两个从动轮10同步转动,从而带动两个从动轮10上的曲柄11转动,本实施例中的曲柄11与从动轮10的中心轴连接,从而曲柄11绕从动轮10中心轴转动;两个同步转动的曲柄11带动与其共同连接的抱箍13移动,抱箍13移动带动波纹软管2径向位移。当然,第一电机12与主动轮9之间还可以设置有减速齿轮组件。主控单元5控制第一电机12的转动角度,即可控制主动轮9的转动角度,从而控制曲柄11的转动角度,继而控制抱箍13及波纹软管2的位移量,而位移量的改变使波纹软管2内气流流通的路径改变,参见图1和图8,波纹软管2内流通气流路径改变后,气流沿着改变路径后的波纹软管2的中心轴方向流动,并从百叶窗3的出口端流出,从而实现出风方向的调节,这种调节方式不需要改变百叶窗3的位置,因此不影响百叶窗3与墙体的安装密封性和安装位置,非常适用于对密封性要求高的传染病医院使用。
本实施例的百叶窗3出风方向的调节不局限于对波纹软管2的调节,还包括对百叶窗3内叶片倾斜角度的调节。当然,这种叶片可调节的方式虽然属于现有技术,但其与软管调节装置相配合使用,可保证百叶窗3出口端流出的风量和风速最大化。
具体为,百叶窗3还包括叶片调节装置;叶片调节装置与叶片连接用于调节叶片的倾斜角度。参见图6、图7,叶片包括由窗体3.1入口端至出口端间隔设置的水平叶片22和竖直叶片23;叶片调节装置包括用于调节水平叶片22的倾斜角度的水平调节装置和用于调节竖直叶片23的倾斜角度的竖直调节装置;叶片调节装置与主控单元5电连接。
水平调节装置包括水平涡轮15、竖直蜗杆16和第二电机17;水平涡轮15与水平叶片22端部连接;竖直蜗杆16与水平涡轮15啮合;第二电机17的转动轴与竖直蜗杆16连接;第二电机17转动带动竖直蜗杆16转动,竖直蜗杆16转动带动水平涡轮15转动,从而带动水平叶片22转动。
竖直调节装置包括竖直涡轮18、水平蜗杆19和第三电机20;竖直涡轮18与竖直叶片23的端部连接;水平蜗杆19与竖直涡轮18啮合;第三电机20的转动轴与水平蜗杆19连接。第三电机20转动带动水平蜗杆19转动,水平蜗杆19转动带动竖直涡轮18转动,从而带动竖直叶片23转动。
本实施例中第一电机12、第二电机17和第三电机20的转动速度和转动角度,均由主控单元5统一调配控制,使波纹软管2的位移方向和位移量与水平叶片22和竖直叶片23的倾斜角度相适应,使气流流经波纹软管2时,气流方向改变,气流流经水平叶片22和竖直叶片23时,保持气流方向不变的同时风量最大。
本发明的百叶窗出风方向自动调节方法,包括以下步骤:
S1、初始程序处理:主控单元利用机器学习方法,计算得出人体在房间内所处位置在不同的范围或坐标时百叶窗出口端保持指向人体的最大风量及对应的系统调节角度,存储数据;
其中,主控单元利用机器学习方法为:主控单元建立以百叶窗出口端几何中心为坐标中心的空间坐标系,并以多普勒雷达传感器感应收集的人体在房间内所处位置的不同范围或坐标及与该范围或坐标对应的百叶窗出口端指向人体的风量和系统调节角度作为训练样本;机器学习方法采用现有技术,比如回归算法,BP神经网络等,此过程采用现有成熟技术,本实施例不进行具体限定。
系统调节角度包括与百叶窗连通的波纹软管的几何中心轴偏移角度和百叶窗内叶片的倾斜角度。
S2、主控单元设置追踪判定时间T及百叶窗出口端保持指向人体的最大风量时对应的房间内空间的有效范围M;追踪判定时间T可人为设定和调节;比如,认为设定追踪判定时间T为5秒。
有效范围M也可由人工设定,比如,人体处于房间内的某一坐标位置,百叶窗出口端指向人体所处的该坐标位置,该坐标位置及该坐标位置周围的一定范围内(该坐标处于该一定范围以内)均可检测到百叶窗出口端吹出的气流,选取该一定范围内检测到的风速大于V1的区域作为本实施例中的有效范围M。本实施例中V1优选为0.25m/s,当然,其可以是其他值。有效范围M也可在初始程序处理中由主控单元利用机器学习方法完成。当然,需要借助设置在房间内的风速检测装置,风速检测装置的安放位置融合至主控单元建立以百叶窗出口端几何中心为坐标中心的空间坐标系中。
S3、主控单元实时接收和处理多普勒雷达传感器感应收集的人体在房间内所处位置的范围或坐标P;即房间内医护人员走动过程中,多普勒雷达传感器实时收集人体在房间内所处位置的范围或坐标P,主控单元实时接收和处理该范围或坐标P对应的数据。
S4、一级追踪指令和二级追踪指令的发出需要根据房间内人体移动范围和停留时间而定。
当范围或坐标P全部未超出有效范围M时,进入步骤S5;即房间内医护人员走动的范围或坐标P处于百叶窗出口端吹出的气流方向及符合要求的风速和风量范围(有效范围M)内,进入步骤S5;由于多普勒雷达传感器的检测误差,可能无法精准定位到房间内人体的坐标,因此优选为多普勒雷达传感器获取的人体在房间内所处位置为一个适当的范围。
当范围或坐标P至少部分超出有效范围M,且持续时间小于追踪判定时间T时,进入步骤S5;即房间内医护人员走动的范围或坐标P虽然可能处于百叶窗出口端吹出的气流方向及符合要求的风速和风量范围以外,但若持续时间较短,比如,本实施例的追踪判定时间T为5秒时,医护人员处于有效范围M以外的时间为3秒,则依然只需进入步骤S5。
当范围或坐标P至少部分超出有效范围M,且持续时间大于等于追踪判定时间T时,进入步骤S6;即房间内医护人员走动的范围或坐标P可能处于百叶窗出口端吹出的气流方向及符合要求的风速和风量范围以外,且持续时间较长,比如持续时间为6秒,则需要进入步骤S6。
S5、主控单元调取步骤S1存储的数据,向叶片调节装置发出一级追踪指令:使百叶窗的叶片朝范围或坐标P倾斜;由于主控单元发出一级追踪指令的前提是房间内人体走动发范围或坐标P处于有效范围M内,或即使处于有效范围M外但持续时间小于追踪判定时间T,意味着该人体依然处于百叶窗出口端吹出的气流方向及符合要求的风速和风量范围内,因此只需要调节叶片角度即可。进入步骤S7;
S6、主控单元调取步骤S1存储的数据,向软管调节装置发出二级追踪指令:使与百叶窗连通的波纹软管的几何中心轴指向范围或坐标P;虽然二级追踪指令是对波纹软管的控制,但实际上,二级追踪指令包含有一级追踪指令的任务,即二级追踪指令发出后,先调节波纹软管的几何中心轴方向,使其指向房间内人体所处的范围或坐标P;此后,人体所处的范围或坐标P符合发出一级追踪指令的前提条件。进入步骤S7;
S7、重复步骤S3。实现对房间内人体的自动定位和追踪,保证持续向人体所在方位输送最大风量和风速的气流。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,同样也应视为本发明的保护范围。
- 一种百叶窗出风方向自动调节系统及方法
- 一种空调器和控制出风方向的方法