一种分体式虚拟现实手持控制设备及其控制方法
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及VR设备技术领域,更具体的说是涉及一种分体式虚拟现实手持控制设备及其控制方法。
背景技术
游戏手柄是一种常见电子游戏机的部件,通过操纵其按钮等,实现对游戏虚拟角色的控制,由于VR的诞生,不仅仅带动影视业的发展,同时还带动了VR游戏的诞生,但是VR技术应用在游戏上虽然能够给用户带来截然不同的沉浸式体验,但是普通的切换手柄由于需要双手握紧才能进行操控,限制了用户手部的活动,已经不能满足游戏操作的需要,难以跟上时代。
因此,如何设计出一种能够灵活操作的分体式虚拟现实手持控制设备是本领域技术人员亟需解决的问题。
发明内容
有鉴于此,本发明提供了一种分体式虚拟现实手持控制设备及其控制方法,有效解决了现有技术中的手柄需要双手同时握紧才能进行操控无法满足VR游戏等操作的需要这一问题。
为了实现上述目的,本发明采用如下技术方案:
一种分体式虚拟现实手持控制设备,与上位机相连,包括:手柄单体,所述手柄单体的上方设置有金属连接件,两个所述手柄单体之间通过磁吸结构相连;
所述手柄单体内包括体感切换模块、动作捕捉模块、数据处理模块、手势接收模块、无线通信模块和深度学习模块;
所述体感切换模块,用于判断当前环境所需的控制方式,实现所述手柄单体的体感控制和手势控制的控制方式的切换;
所述动作捕捉模块,用于对所述手柄单体所受到的惯性数据进行采集,实现体感控制;
所述数据处理模块,用于接收所述动作捕捉模块所采集到的信号,并对信号进行处理得到相应的动作控制命令;
所述手势接收模块,用于采集所述手柄单体所收到的手势控制信号,实现手势控制;
所述无线通信模块,用于将所述数据处理模块计算得到的动作控制命令和所述手势接收模块所采集到的手势控制信号发送至被控的所述上位机;
所述深度学习模块,用于收集所述动作捕捉模块和所述手势接收模块所述采集到的信号数据,通过深度学习相关模型对数据进行训练,实现所述数据处理过程优化。
优选的,所述动作捕捉模块包括三轴加速计、三轴陀螺仪和三轴磁力计;
所述三轴加速计,用于测量并采集所述手柄单体的三个轴向上的加速度;
所述三轴陀螺仪,用于测量并采集所述手柄单体的三个轴向上的角速度;
所述三轴磁力计,用于测量并采集所述手柄单体周围的磁场强度及与地球磁场的夹角。
优选的,所述数据处理模块包括高通滤波器、低通滤波器、数据融合单元和姿态拟合单元;
所述高通滤波器,用于消除所述三轴加速计和所述三轴磁力计的高频噪声;
所述低通滤波器,用于消除所述三轴陀螺仪的低频噪声;
所述数据融合单元,用于获取所述三轴加速计、所述三轴陀螺仪和所述三轴磁力计所采集到的数据进行融合,获得所述手柄单体的旋转;
所述姿态拟合单元,用于根据所述手柄单体的旋转进行手部姿态拟合,计算出控制所述手柄单体的手部运动姿势。
优选的,所述手柄单体上设置有万向按钮,所述万向按钮与所述手势接收模块相连,所述手势接收模块接收所述万向按钮所受到的手势控制,并将手势控制的控制信号发送至所述上位机。
优选的,所述手柄单体的外壳设置为流线型,贴合手掌弧度。
一种分体式虚拟现实手持控制设备的控制方法,包括以下步骤:
S1.判断当前环境所需的控制方式,选择对手柄单体的控制方式,所述控制方式包括:体感控制、手势控制或体感控制和手势控制相结合;
S2.当选择体感控制方式时,动作捕捉模块对所述手柄单体所受到的惯性数据进行采集,数据处理模块对惯性数据进行处理得到相应的动作控制命令;
当选择手势控制方式时,手势接收模块采集所述手柄单体所收到的手势控制信号;
当选择体感控制和手势控制相结合方式时,则同时对惯性数据和手势控制信号进行采集;
S3.通过无线通信模块将所述数据处理模块计算得到的动作控制命令和所述手势接收模块接受到的手势控制信号均发送至被控的上位机;
S4.深度学习模块收集所述动作捕捉模块和所述手势接收模块所述采集到的信号数据,通过深度学习相关模型对数据进行训练,实现所述数据处理过程优化。
优选的,动作捕捉模块采集数据的方法为:通过三轴加速计测量并采集所述手柄单体的三个轴向上的加速度;通过三轴陀螺仪测量并采集所述手柄单体的三个轴向上的角速度;通过三轴磁力计,测量并采集所述手柄单体周围的磁场强度及与地球磁场的夹角;且动作捕捉模块将所采集到的数据均发送至所述数据处理模块。
数据处理模块进行数据处理的方法包括:
数据融合单元对所述三轴加速计、所述三轴陀螺仪和所述三轴磁力计所采集到的数据进行噪声消除后融合,获得所述手柄单体的旋转;
其中,高通滤波器消除所述三轴加速计和所述三轴磁力计的高频噪声;
低通滤波器消除所述三轴陀螺仪的低频噪声;
姿态拟合单元根据所述手柄单体的旋转进行手部姿态拟合,计算出控制所述手柄单体的手部运动姿势。
优选的,所述手势接收模块采集数据的方法为:所述手势接收模块接收所述万向按钮所受到的手势控制,并将控制信号发送至所述上位机。
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种分体式虚拟现实手持控制设备及其控制方法,其中公开了该手持控制设备设置为分体结构,通过磁吸技术实现两个分体之间的连接,有效解决了现有技术中的手柄需要双手同时紧握的缺陷,手握住手柄单体既可捕捉到手部动作从而实现相应的控制,并且还设置有手势接收模块,通过该模块接收用户对手柄的手势控制从而实现方向控制等,保证了该手柄控制方法的多样性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
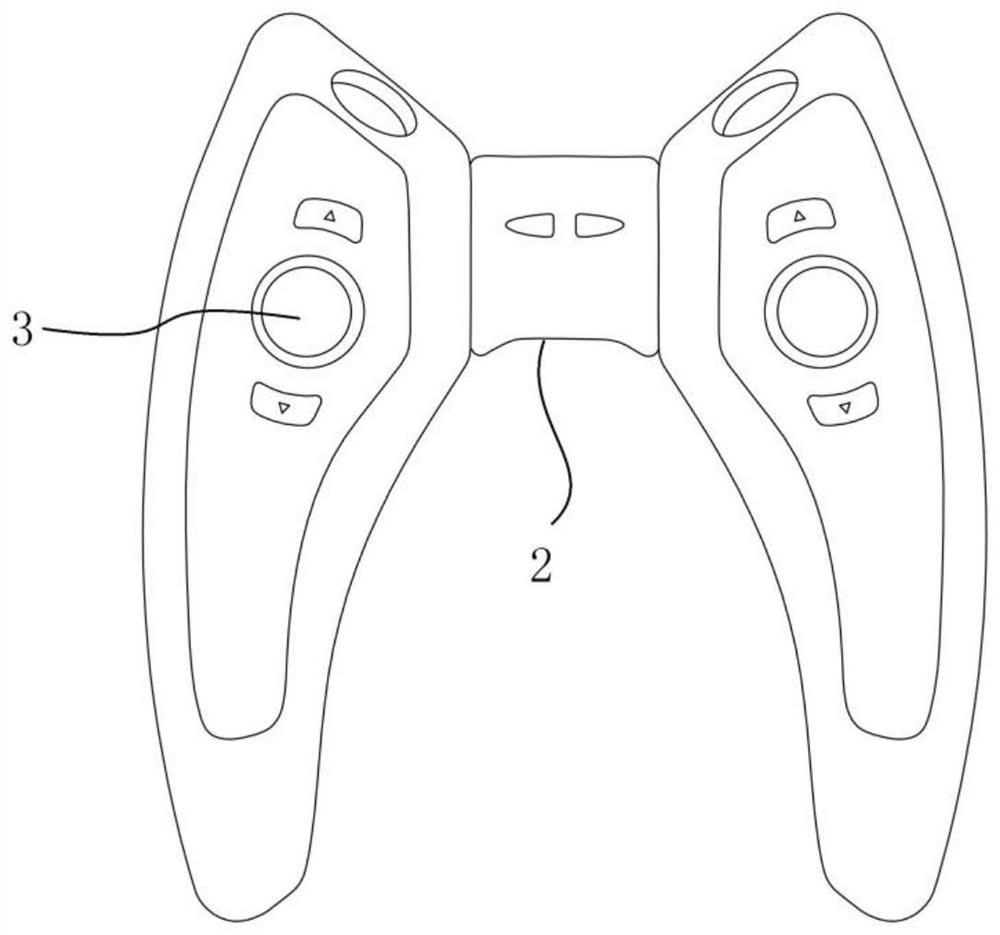
图1附图为本发明提供的一种分体式虚拟现实手持控制设备整体结构示意图;
图2附图为本发明提供的一种分体式虚拟现实手持控制设备的手柄单体结构示意图;
图3附图为本发明提供的一种分体式虚拟现实手持控制设备中手柄单体的框架结构示意图;
其中,1-金属连接件、2-磁吸结构、3-万向按钮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例公开了一种分体式虚拟现实手持控制设备,与上位机相连,包括:手柄单体,手柄单体的上方设置有金属连接件1,两个手柄单体之间通过磁吸结构2相连;如图1-2所示;
如图3所示,手柄单体内包括体感切换模块、动作捕捉模块、数据处理模块、手势接收模块、无线通信模块和深度学习模块;
体感切换模块,用于判断当前环境所需的控制方式,实现手柄单体的体感控制和手势控制的控制方式的切换;
动作捕捉模块,用于对手柄单体所受到的惯性数据进行采集,实现体感控制;
数据处理模块,用于接收动作捕捉模块所采集到的信号,并对信号进行处理得到相应的动作控制命令;
手势接收模块,用于采集手柄单体所收到的手势控制信号,实现手势控制;
无线通信模块,用于将数据处理模块计算得到的动作控制命令和手势接收模块所采集到的手势控制信号发送至被控的上位机;
深度学习模块,用于收集动作捕捉模块和手势接收模块采集到的信号数据,通过深度学习相关模型对数据进行训练,实现数据处理过程优化。
为了进一步实现上述技术方案,动作捕捉模块包括三轴加速计、三轴陀螺仪和三轴磁力计;
三轴加速计,用于测量并采集手柄单体的三个轴向上的加速度;
三轴陀螺仪,用于测量并采集手柄单体的三个轴向上的角速度;
三轴磁力计,用于测量并采集手柄单体周围的磁场强度及与地球磁场的夹角。
为了进一步实现上述技术方案,数据处理模块包括高通滤波器、低通滤波器、数据融合单元和姿态拟合单元;
高通滤波器,用于消除三轴加速计和三轴磁力计的高频噪声;
低通滤波器,用于消除三轴陀螺仪的低频噪声;
数据融合单元,用于获取三轴加速计、三轴陀螺仪和三轴磁力计所采集到的数据进行融合,获得手柄单体的旋转;
姿态拟合单元,用于根据手柄单体的旋转进行手部姿态拟合,计算出控制手柄单体的手部运动姿势。
为了进一步实现上述技术方案,手柄单体上设置有万向按钮3,万向按钮3与手势接收模块相连,手势接收模块接收万向按钮3所受到的手势控制,并将控制信号发送至上位机。
为了进一步实现上述技术方案,手柄单体的外壳设置为流线型,贴合手掌弧度。
一种分体式虚拟现实手持控制设备的控制方法,包括以下步骤:
S1.判断当前环境所需的控制方式,选择对手柄单体的控制方式,控制方式包括:体感控制、手势控制或体感控制和手势控制相结合;
S2.当选择体感控制方式时,动作捕捉模块对手柄单体所受到的惯性数据进行采集,数据处理模块对惯性数据进行处理得到相应的动作控制命令;
当选择手势控制方式时,手势接收模块采集手柄单体所收到的手势控制信号;
当选择体感控制和手势控制相结合方式时,则同时对惯性数据和手势控制信号进行采集;
S3.通过无线通信模块将数据处理模块计算得到的动作控制命令和手势接收模块接受到的手势控制信号均发送至被控的上位机;
S4.深度学习模块收集动作捕捉模块和手势接收模块采集到的信号数据,通过深度学习相关模型对数据进行训练,实现数据处理过程优化。
为了进一步实现上述技术方案,动作捕捉模块采集数据的方法为:通过三轴加速计测量并采集手柄单体的三个轴向上的加速度;通过三轴陀螺仪测量并采集手柄单体的三个轴向上的角速度;通过三轴磁力计,测量并采集手柄单体周围的磁场强度及与地球磁场的夹角;且动作捕捉模块将所采集到的数据均发送至数据处理模块。
数据处理模块进行数据处理的方法包括:
数据融合单元对三轴加速计、三轴陀螺仪和三轴磁力计所采集到的数据进行噪声消除后融合,获得手柄单体的旋转;
其中,高通滤波器消除三轴加速计和三轴磁力计的高频噪声;
低通滤波器消除三轴陀螺仪的低频噪声;
姿态拟合单元根据手柄单体的旋转进行手部姿态拟合,计算出控制手柄单体的手部运动姿势。
为了进一步实现上述技术方案,手势接收模块采集数据的方法为:手势接收模块接收万向按钮3所受到的手势控制,并将控制信号发送至上位机。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种分体式虚拟现实手持控制设备及其控制方法
- 控制设备、输入设备、控制系统、手持型信息处理设备、控制方法