飞行控制系统以及飞行控制方法
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及飞机飞行控制领域,尤其涉及一种飞行控制系统以及飞行控制方法。
背景技术
飞行控制系统是现代民用飞机上的复杂且关键的系统,对于飞机安全至关重要。目前,世界上投入运营的单通道或双通道民用客机中的飞行控制系统都采用了某种形式的备份装置。以防止预防在丧失所有控制电子设备后对飞机保持一定的操纵能力。
例如,空客公司制造的A320飞机在完全丧失电传飞行控制系统之后,直到电传飞行控制系统内的某1台飞控计算机重新启动为止采用一种机械备份形式来在短时间内保持飞机姿态稳定,通过由飞行员在驾驶室对脚蹬和人工配平手轮进行操纵来控制飞机的方向舵和水平安定面,从而为飞机提供一定的偏航和俯仰控制能力。波音公司制造的B777飞机也同样采用了与A320类似的机械备份形式,在丧失电传飞行控制系统之后对一对扰流板(4#和11#)和水平安定面进行控制。
但是这种通过飞行员进行机械操纵的备份形式十分不精确,也非常考验飞行员自身的操纵能力。为此,此后在空客系列飞机和波音系列飞机中取代机械备份形式而采用了电备份形式,以提供较为精准的操纵信号。
由于上述备份装置仅能够提供对部分飞机舵面进行操纵的低品质等级的操纵能力,所以很难达到飞行控制系统的最小可接受控制要求。为此,空客公司推出的A380、A350中采用的电备份形式能够提供以满足最小可接受控制要求的方式操纵飞机舵面、甚至对所有飞机舵面均进行操纵这样的较高品质等级的操纵能力,从而实现了飞机的持续安全飞行与着陆,大幅提升了安全裕度。
然而,现有的这种采用电备份形式且满足最小可接受控制构型的备份装置基本是在完全丧失电传飞行控制系统之后、即所有飞行控制计算机都失效之后才启动或者才允许进入工作状态,从而存在备份装置从启动到实际上进入工作状态需要花费一定时间,因此可能会丧失保持飞机稳定姿态的一部分宝贵时间的问题。另外,这种备份装置在被激活之后,其指令的可用性和正确性是不可知的,从而存在无法确保利用该备份装置对飞机舵面的控制的准确性的问题。
发明内容
本发明是鉴于上述问题而提出的,其目的在于提供一种能够使备份控制设备采用热备份状态、并保证备份控制设备的指令的可用性和正确性的飞行控制系统以及飞行控制方法。
为了达到该目的,本发明提供一种飞行控制系统,其具备:操纵装置,其用于提供驾驶舱的操纵指令;飞行控制装置,其从所述操纵装置接收操纵指令,并根据所接收的操纵指令而生成对飞机舵面进行控制的控制指令;以及飞控作动装置,其接收由所述飞行控制装置生成的控制指令,并根据所接收的控制指令使相应的所述飞机舵面动作,所述飞行控制装置包括:能够执行正常模式控制律的增强指令控制设备、与所述增强指令控制设备连接且能够执行直接模式控制律的基本指令控制设备、和与所述基本指令控制设备连接且能够执行备份模式控制律的备份控制设备,在所述基本指令控制设备有效的情况下,所述备份控制设备参与对从所述操纵装置接收到的所述操纵指令的表决并且参与对所述控制指令的表决,在所述基本指令控制设备失效的情况下,所述备份控制设备根据从所述操纵装置接收的所述操纵指令生成控制指令,并将所生成的控制指令发送至所述飞控作动装置。
根据本发明的一种优选方式,在所述基本指令控制设备有效的情况下,通过所述基本指令控制设备和所述备份控制设备一并对所接收到的操纵指令进行表决,来表决出有效操纵指令。
根据本发明的一种优选方式,在所述增强指令控制设备有效的情况下,通过所述基本指令控制设备将所述有效操纵指令发送至所述增强指令控制设备,通过所述增强指令控制设备根据所接收到的有效操纵指令来生成控制指令,并且将所生成的控制指令发送至所述基本指令控制设备和所述备份控制设备,通过所述基本指令控制设备和所述备份控制设备分别对所接收到的所述控制指令进行解算,并且一并对由各自解算出的控制指令进行表决从而表决出有效控制指令,以及/或者在所述增强指令控制设备失效的情况下,通过所述基本指令控制设备和所述备份控制设备根据所述有效操纵指令分别生成控制指令,并且一并对所生成的控制指令进行表决从而表决出有效控制指令。
根据本发明的一种优选方式,飞行控制系统还包括用于检测包括空速、迎角在内的飞行状态信息的交联系统传感器,该交联系统传感器与所述增强指令控制设备连接,在所述增强指令控制设备有效的情况下,所述增强指令控制设备基于有效操纵指令以及从所述交联系统传感器接收到的飞行状态信息来生成控制指令。
根据本发明的一种优选方式,飞行控制系统还包括用于检测包括俯仰角速率、偏航角速率、滚转角速率在内的飞行状态信息的直接模式传感器,在所述增强指令控制设备失效的情况下,所述基本指令控制设备基于有效操纵指令以及从直接模式传感器接收到的飞行状态信息来生成控制指令。另外,在所述基本指令控制设备失效的情况下,所述备份控制设备基于从所述操纵装置接收到的操纵指令以及从直接模式传感器接收到的飞行状态信息来生成控制指令。
根据本发明的一种优选方式,所述增强指令控制设备具备多台增强指令计算机,该多台增强指令计算机之间彼此连接,每台增强指令计算机均能够针对所有飞机舵面生成控制指令,在所述增强指令控制设备和所述基本指令控制设备均有效的情况下,由所述增强指令控制设备控制飞机舵面的动作,当多台增强指令计算机中的某1台失效时,由其他增强指令计算机继续针对所有飞机舵面生成控制指令,当所述多台增强指令计算机全部失效时,由所述基本指令控制设备控制飞机舵面的动作。
根据本发明的一种优选方式,所述基本指令控制设备具备多台基本指令计算机,每台基本指令计算机仅针对部分飞机舵面生成控制指令,所有基本指令计算机能够针对所有飞机舵面生成控制指令,在所述增强指令控制设备失效且所述基本指令控制设备有效的情况下,由所述基本指令控制设备控制飞机舵面的动作,当多台基本指令计算机中的某1台失效时,由其他基本指令计算机继续以满足最小可接受控制构型的方式针对部分飞机舵面生成控制指令,当所述多台基本指令计算机全部失效时,由所述备份控制设备控制飞机舵面的动作。
根据本发明的一种优选方式,所述多台基本指令计算机分为与任一个飞机舵面上的远程控制设备连接并直接控制该远程控制设备的直接控制指令计算机、和没有与所述远程控制设备连接的间接控制指令计算机,针对某1台所述远程控制设备,通过所述直接控制指令计算机生成控制指令,并且通过所述间接控制指令计算机对所生成的控制指令进行表决。
根据本发明的一种优选方式,所述备份控制设备具备1台备份计算机,该备份计算机与所述飞行作动装置上的满足最小可接受控制构型的部分飞机舵面连接,能够针对这些飞机舵面生成控制指令。
根据本发明的一种优选方式,在所述操纵装置设有用于检测对操纵器件的操纵的奇数个操纵器件传感器,所述操纵器件传感器分别与所述基本指令控制设备和所述备份控制设备连接。所述操纵器件传感器可以为位置信号传感器
根据本发明的一种优选方式,所述飞控作动装置具备多个飞机舵面中的作动器以及分别控制每个作动器的多台远程控制设备。
针对同一个飞机舵面设置的多个远程控制设备为采用非相似设计的不同型号的远程控制设备。
根据本发明的一种优选方式,飞行控制系统还包括对所述操纵装置、所述增强指令控制设备、所述基本指令控制设备以及飞控作动装置供电的能源装置。
根据本发明的一种优选方式,在所述基本指令控制设备有效的情况下,当来自所述备份控制设备的用于参与表决的操纵指令或者控制指令为错误指令的次数超过规定阈值时,将所述备份控制设备重启。
本发明还提供一种飞行控制方法,其为使用本发明的上述飞行控制系统进行飞行控制的方法。
根据本实施方式的飞行控制系统以及飞行控制方法,在飞机飞行的过程中,备份控制设备始终处于启动状态,从而在其他飞行控制设备失效时能够使飞机立即进入由备份控制设备执行的备份模式,大幅缩短了飞机处于不可控状态的时间。并且,由于备份控制设备始终参与对来自操纵装置的操纵指令的表决以及对用于控制飞机舵面的控制指令的表决,所以能够校验由备份控制设备自身接收的操纵指令以及生成的控制指令的可用性和正确性,由此,在其他飞行控制设备失效时,能够确保利用该备份控制设备对飞机舵面的控制的准确性,实现飞机的持续安全飞行与着陆。
附图说明
为了更好地理解本发明的上述及其他目的、特征、优点和功能,可以参考附图中所示的优选实施方式。附图中相同的附图标记指代相同的部件。本领域技术人员应该理解,附图旨在示意性地阐明本发明的优选实施方式,对本发明的范围没有任何限制作用,图中各个部件并非按比例绘制。
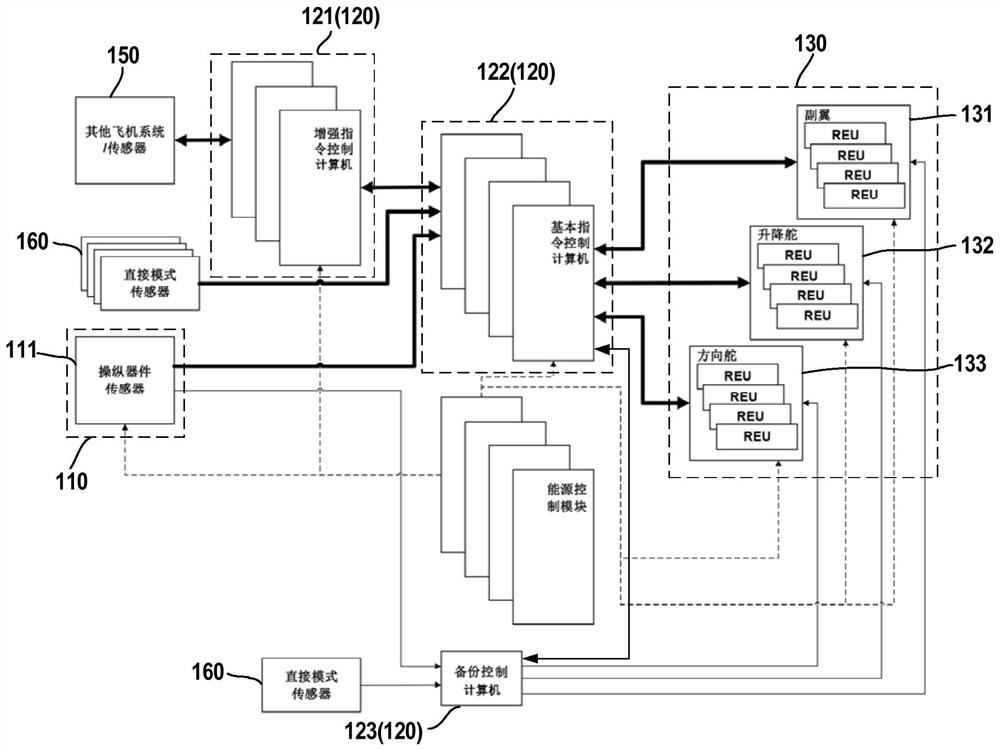
图1是示意性地示出本发明的飞行控制系统的架构图。
图2是示意性示出本发明的基本指令控制装置中不同控制类型计算机与飞控作动装置的一种对应关系的示意图。
图3是示意性示出将本发明的飞行控制系统应用于单通道飞机时的飞机舵面布局图。
其中,附图标记说明如下:
110驾驶舱操纵装置、111操纵器件传感器、120飞行控制装置、
121增强指令控制设备、122基本指令控制设备、123备份控制设备、
130飞控作动装置、131、301副翼、132、302升降舵、133、303方向舵、304水平安定面、140能源控制模块(能源装置)、150其他飞机系统/传感器、160直接模式传感器、2221、2222、2223、2224BCC、2311L_AIL_REU1、2312L_AIL_REU2、2313R_AIL_REU1、2314R_AIL_REU2、2321左副翼外作动器、2322左副翼内作动器、2323右副翼外作动器、2324右副翼外作动器。
具体实施方式
接下来将参照附图详细描述本发明的发明构思。这里所描述的仅仅是根据本发明的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本发明的其他方式,所述其他方式同样落入本发明的范围。
(系统架构、飞控模式)
图1是示意性地示出本发明的飞行控制系统的架构图。本发明的飞行控制系统包括:驾驶舱操纵装置110,其搭载有多个操纵器件,经由分别对这些操纵器件的操纵进行检测的多个操纵器件传感器111而提供相应的操纵指令;飞行控制装置120,其包括增强指令控制设备121、与增强指令控制设备121连接的基本指令控制设备122和与基本指令控制设备122连接的备份控制设备123,该飞行控制装置120从操纵器件传感器111接收来自驾驶舱的操纵指令,并结合飞机状态信息计算并输出对飞机舵面进行控制的控制指令;飞控作动装置130,其接受来自飞行控制装置120的控制指令,使包含副翼131、升降舵132和方向舵133在内的相应的飞机舵面动作;以及能源控制模块140,其用来对飞行控制系统进行供电。
在本实施方式中,操纵器件传感器111与基本指令控制设备122和备份控制设备123分别连接。在驾驶舱中的飞行员对上述操纵器件中的某一个、例如对驾驶盘进行操纵时,经由上述操纵器件传感器111检测到驾驶盘的位置变动,并将基于该位置变动的操纵指令发送给飞行控制装置120中的基本指令控制设备122和备份控制设备123。
在基本指令控制设备122有效(即,没有发生故障)的情况下,该基本指令控制设备122和备份控制设备123一并对所接收到的操纵指令进行表决,从而表决出有效操纵指令,该有效操纵指令经由基本指令控制设备122向增强指令控制设备121发送。
增强指令控制设备121与其他飞机系统/传感器150连接,能够从其他飞机系统/传感器150获取与复杂的飞机状态相关的接口信号(例如空速、迎角等)。在该增强指令控制设备121有效的情况下,能够根据获取到的接口信号以及有效操纵指令,执行复杂且高层级的正常模式控制律的计算,由此,来生成用于控制飞机舵面的高精度的控制指令,并向基本指令控制设备122输出。另外,增强指令控制设备121也经由未图示的数字通信总线向备份控制设备123输出所生成的控制指令。
然后,基本指令控制设备122和备份控制设备123分别解算来自增强指令控制设备121的控制指令,并且一并对解算出的控制指令进行表决,由此来表决出有效控制指令,然后将该有效控制指令发送给飞控作动装置130以控制相应的飞机舵面的动作。
以上,为飞行控制系统在飞行控制装置120中的增强指令控制设备121和基本指令控制设备122均有效的情况下执行的正常飞控模式。
在增强指令控制设备121失效(即,发生故障而停止工作)的情况下,若基本指令控制设备122有效则飞行控制系统进入直接飞控模式。
在该直接飞控模式下,基本指令控制设备122和备份控制设备123分别从与它们连接的直接模式传感器160获取俯仰角速率、偏航角速率、滚转角速率等的基本飞机状态信号。基本指令控制设备122根据表决出的有效操纵指令和获取的基本飞机状态信号执行基于直接模式控制律的计算并生成用于控制飞机舵面的控制指令,备份控制设备123也根据表决出的有效操纵指令和获取的基本飞机状态信号执行基于最基础的备份模式控制律的计算并生成用于控制飞机舵面的控制指令。此后,基本指令控制设备122和备份控制设备123通过一并对各自计算出的控制指令进行表决,来表决出有效控制指令,并将其发送给飞控作动装置130以控制相应的飞机舵面的动作。
在基本指令控制设备122失效的情况下,无论增强指令控制设备121是否有效,飞行控制系统均进入备份模式。
在该备份模式下,备份控制设备123不执行任何表决,针对来自驾驶舱操纵装置110的操纵指令,结合来自直接模式传感器160的基本飞机状态信号执行备份模式控制律计算,然后,生成有效的控制指令并将该控制指令发送至飞控作动装置130以用于控制满足最小可接受控制构型的飞机舵面。
(系统各组成部分)
接下来,具体说明本发明的飞行控制系统的各组成部分。
<飞行控制装置>
增强指令控制设备121具备X台(X为3以上的整数)增强指令控制计算机(Augmented Command Computer,以下简称为ACC),在本实施范式中设为3台。这些ACC彼此之间通过例如ARINC429、1553B和CAN等的数字通信总线,能够双向地发送和接收数据,数字通信总线优选使用ARINC429。由于能够通过1台ACC控制所有飞行舵面,实现飞行控制系统的正常飞控模式功能,所以这些ACC可以选择主-主-主(Active-Active-Active)、主-主-备(Active-Active-Standby)、或主-备-备(Active-Standby-Standby)中的任一种工作模式。在本实施方式中,这些ACC优选采用主-备-备的工作方式。
此外,为了消除以往的飞行控制系统中存在的共模故障的问题,ACC具有采用非相似设计的控制通道和监控通道。这两个通道可以采用两种不同的微处理器组合、也可以采用两种不同型号的DSP组合、还可以采用两种不同型号的PLD组合。两个芯片共同使用一个接口FPGA。通道之间通过物理方式进行隔离。ACC通过控制通道执行在正常飞控模式下对控制指令的计算,并通过监控通道来验证控制通道的指令的正确性。
在飞行控制系统处于正常飞控模式下,当主控ACC检测到内部故障时(如中央处理器、RAM故障),通过数字通信总线通知其余两台ACC,然后切断该主控ACC与外围设备的连接,使该主控ACC由工作状态进入失效状态。同时,1台备用ACC由备用状态进入工作状态,但是剩余的另1台备用ACC仍保持备用状态。
当第2台工作ACC检测到内部故障时,通过数字通信总线通知另1台备用ACC,然后切断第2台工作ACC与外围设备的连接,使其进入失效状态。同时最后1台备用ACC由备用状态转入工作状态。
从增强指令控制设备121向基本指令控制设备122发送的控制指令中包含表示该控制指令是否有效的指令信息,例如,增强指令控制设备121中的某1台有效的ACC向基本指令控制设备122发送的控制指令中包含“指令有效”这样的指令信息,某1台失效的ACC向基本指令控制设备122发送的控制指令中包含“指令无效”这样的指令信息。但不限于此,也可以设为当某1台ACC失效时便不再向基本指令控制设备122发送控制指令。
当3台ACC均发生故障时,从增强指令控制设备121的任1台ACC向基本指令控制设备122发送的指令信息皆为“指令无效”、即表示控制指令无效,或者基本指令控制设备122检测到超过规定的时间之后仍没有从增强指令控制设备121接收到控制指令的这种情况,此时,基本指令控制设备122判断为增强指令控制设备121失效,使飞行控制系统进入直接模式,并将所有ACC从整个飞行控制系统中隔离出来。
基本指令控制设备122具备Y台(Y为4以上的整数)基本指令控制计算机(BasicCommand Computer,以下简称为BCC),在本实施范式中设为4台。这些BCC分别控制不同的飞控作动装置130所具有的后述的设于飞机舵面上的远程控制设备(Remote ElectronicsUnit,以下简称为REU),由4台BCC控制所有REU。因此,4台BCC必须采用主-主-主-主(Active-Active-Active-Active)的工作方式。
BCC的控制结构与ACC相同,也采用非相似设计的控制通道和监控通道。BCC中的控制通道和监控通道间仅有用于验证指令真值性的少量信号的交叉传输,在支路间进行物理隔离,并且每个通道由独立电源供电,保证两通道的独立性,因此只有当两个独立的故障同时发生时才将导致验证失效。BCC通过控制通道执行在正常飞控模式下对来自增强指令控制设备121的控制指令的解算或者执行在直接飞控模式下直接对控制指令的计算,并通过监控通道来验证控制通道的指令的正确性。
不同的BCC与驾驶舱操纵装置110内的不同的操纵器件传感器连接。因此,由于每台BCC对应不同的操纵器件传感器和与操纵指令对应的飞机舵面上的REU,所以当4台BCC中的某1台失效时,与该台BCC连接的REU以及由REU控制的后述的作动器成为不可控状态。但为了满足飞机的最小可接受控制,通过优化配置以保证在丧失部分BCC的控制的情况下仍能够实现飞机的持续安全飞行与着陆,提高系统可用性。
每台BCC通过数字通信总线(优选使用CAN总线)向备份控制设备123提供离散信号,在1台BCC正常工作时向备份控制设备123提供28V的高电平离散信号,在1台BCC失效时向备份控制设备123提供0V的低电平离散信号,由此,由备份控制设备123来监控基本指令控制设备122的工作状态,当备份控制设备123从所有BCC接收到的离散信号均为低电平时,判断为所有BCC失效,从而使飞行控制系统进入备份模式。
在本实施方式中,所有BCC的构造与内部执行的逻辑运算完全相同,依据每台BCC的针脚来识别该BCC的安装位置和控制对象。4台BCC分为与任一个飞机舵面上的REU连接并直接控制该REU的直接控制类BCC和没有与该REU连接的间接控制BCC。针对某1台REU由与其连接的直接控制类BCC生成控制指令,其余的没有与该REU连接的间接控制类BCC仅用于对所生成的控制指令进行表决。关于不同类型的BCC与REU的连接的详细内容在后面进行说明。
本实施方式中的备份控制设备123具备1台备份计算机(Backup Control,以下简称为BC)。BC具备一个控制通道和一个独立于能源控制模块140的电源模块。该控制通道例如由一块FPGA构成,通过该FPGA从与BC连接的操纵器件传感器采集操纵指令。
BC与飞行作动装置130所具备的用于对满足最小可接受控制构型的所有飞机舵面的每一个上的作动器进行控制的各一个REU连接。因此,在基本指令控制设备122的所有BCC都失效的情况下,飞行员仍旧能够通过备份控制设备123、即通过BC对所有舵面进行操控,来能够保证飞机的持续飞行安全与着陆。
<驾驶舱操纵装置>
在驾驶舱操纵装置110搭载的多个操纵器件例如为驾驶杆、驾驶盘、脚蹬、水平安定面配平开关、侧杆等。多个操纵器件传感器111例如为安装在这些操纵器件的内部的传感器,但也可以与操纵器件分体地设置。优选针对每个操纵器件安装有例如5个或7个的奇数个操纵器件传感器,在本实施方式中,与4台BCC和1台BC对应地,针对每个操纵器件安装有5个操纵器件传感器。这些操纵器件传感器可以是用于检测位置信号的位置信号传感器、电位计或光电编码器,在本实施方式中,选择位置信号传感器来作为操纵器件传感器。
在本实施方式中,安装的5个位置信号传感器与4台BCC以及1台BC的连接方式如下。
例如,在操纵器件为驾驶盘的情况下,1台BCC连接左驾驶盘的第1位置信号传感器,还连接右驾驶盘的第1位置信号传感器;1台BCC连接左驾驶盘的第2位置信号传感器,还连接右驾驶盘的第2位置信号传感器;1台BCC连接左驾驶盘的第3位置信号传感器,还连接右驾驶盘的第3位置信号传感器;1台BCC连接左驾驶盘的第4位置信号传感器,还连接右驾驶盘的第4位置信号传感器;BC连接左驾驶盘的第5位置信号传感器,还连接右驾驶盘的第5位置信号传感器。
在操纵器件为驾驶杆的情况下,1台BCC连接左驾驶杆的第1位置信号传感器,还连接右驾驶杆的第1位置信号传感器;1台BCC连接左驾驶杆的第2位置信号传感器,还连接右驾驶杆的第2位置信号传感器;1台BCC连接左驾驶杆的第3位置信号传感器,还连接右驾驶杆的第3位置信号传感器;1台BCC连接左驾驶杆的第4位置信号传感器,还连接右驾驶杆的第4位置信号传感器;BC连接左驾驶杆的第5位置信号传感器,还连接右驾驶杆的第5位置信号传感器。
在操纵器件为脚蹬的情况下,1台BCC连接左脚蹬的第1位置信号传感器,还连接右脚蹬的第1位置信号传感器;1台BCC连接左脚蹬的第2位置信号传感器,还连接右脚蹬的第2位置信号传感器;1台BCC连接左脚蹬的第3位置信号传感器,还连接右脚蹬的第3位置信号传感器;1台BCC连接左脚蹬的第4位置信号传感器,还连接右脚蹬的第4位置信号传感器;BC连接左脚蹬的第5位置信号传感器,还连接右脚蹬的第5位置信号传感器。
<飞控作动装置>
飞控作动装置130针对副翼131、升降舵132或方向舵133等的每个飞机舵面具备多台REU以及由每台REU分别控制的多个作动器。每台REU通过数字通信总线(优选使用CAN总线)从BCC或BC接收控制指令,该控制指令包括作动器位置指令、速率指令。通过识别安装位置来判断每台REU所控制的作动器类型,从而设定相应的控制参数。
在本实施方式中,如图2所示,以副翼舵面为例来说明REU的安装以及连接情况。例如,在将本实施方式的飞行控制系统应用于单通道飞机的情况下,左右两个副翼舵面上共安装有4台REU(每侧副翼各安装有2台REU)及其对应的作动器,这4台REU分别为L_AIL_REU12311、L_AIL_REU2 2312、R_AIL_REU1 2313、R_AIL_REU2 2314,由这4台REU控制的作动器分别为左副翼外作动器2321、左副翼内作动器2322、右副翼内作动器2323和右副翼外作动器2324。例如1台BCC 2221与L_AIL_REU1 2311连接并对其进行控制,1台BCC 2222与L_AIL_REU2 2312连接并对其进行控制,1台BCC 2223与R_AIL_REU1 2313连接并对其进行控制,1台BCC 2224与R_AIL_REU2 2314连接并对其进行控制。如上所述,BCC分为直接控制类和间接控制类,在图2中,对于左副翼而言,构成为BCC 2221和BCC 2222为与该左副翼直接连接的直接控制类BCC、BCC 2223和BCC 2224为间接控制类BCC,另一方面,对于右副翼而言,构成为BCC 2223和BCC 2224为与该右副翼直接连接的直接控制类BCC,BCC 2221和2223为间接控制类BCC。
类似地,左右两个升降舵舵面上共安装有4台REU(各侧升降舵安装有2台REU)及其对应的作动器(未图示),对于左升降舵而言,构成为BCC 2221和BCC 2222为直接控制类BCC,BCC 2223和BCC 2224为间接控制类BCC。对于右升降舵,构成为BCC 2223和BCC 2224为直接控制类BCC,BCC 2221和BCC 2222称为间接控制类BCC。
就方向舵而言,三个方向舵的每一个上安装有3台REU,从而针对某一个方向舵,例如可构成为BCC 2221、BCC 2222和BCC 2223为直接控制类BCC,BCC 2224为间接控制类BCC。
像这样,通过针对各飞机舵面将BCC分成直接控制类和间接控制类,能够充分确保BCC对控制指令计算的准确性以及对有效控制指令表决的可靠性。
另外,为了支持关键可用性要求,在本实施方式中的飞行控制系统中采用了I型REU和II型REU这两个型号的REU,这两种REU由采用非相似设计的复杂电子器件构成。同样以副翼舵面为例,安装于左侧副翼的L_AIL_REU1 2311、L_AIL_REU2 2312分别使用I型REU和II型REU,安装于右侧副翼的R_AIL_REU1 2313、R_AIL_REU2 2314分别使用I型REU和II型REU。由于每个飞机舵面上的多个作动器接收来自不同BCC的控制指令,并且由不同类型的REU进行控制,所以能够提高飞机的可控性,进一步保证飞机的飞行安全。
另外,如上所述,每一个飞机舵面上的其中1台REU与BC相连,由此来确保在所有BCC失效之后,通过BC以最小可接受控制构型来控制所有飞机舵面。
<能源控制模块>
能源控制模块140用于对驾驶舱操纵装置110、飞行控制装置120和飞控作动装置130提供电力,控制所有输出载荷的电压,并为每个输出载荷提供断路器保护。但备份控制设备123不由该能源控制模块140提供电力。在本实施方式中,能源控制模块140的数量设为与BCC数量相同,但不限于此,也可以设置为数量不同。另外,也可以不在飞行控制系统中额外设置能源控制模块,而是利用飞机固有的配电系统对上述各设备进行供电。
(系统逻辑)
以下,对本实施方式的飞行控制系统的系统逻辑进行说明。
在飞机处于正常飞控模式或者直接飞控模式的情况下,即,在基本指令控制设备122中的至少部分BCC有效的情况下,备份控制设备123的BC参与对从驾驶舱操纵装置110接收到的所有操纵指令的表决并且参与对作为控制指令的作动器位置指令/速率指令的表决,并且监控和备份表决后的指令结果,但在该情况下,由BC自身生成的控制指令不允许用来控制飞机舵面。
在飞机处于备份模式的情况下,即在基本指令控制设备122中的所有BCC均失效的情况下,备份控制设备123的BC不执行任何表决,而是直接对来自驾驶舱操纵装置110的操纵指令进行解算,并生成用于控制满足最小可接受控制构型的飞机舵面的、作为控制指令的作动器位置指令/速率指令,并向飞控作动装置130输出所生成的作动器位置指令/速率指令,以控制飞控作动装置130所具有的REU以及作动器。BC的工作方式转换关系如下表。
表1
基本指令控制设备122的每台BCC和备份控制设备123的BC之间通过数字通信总线(优选使用ARIC429总线)交换指令数据。另外,如上所述,BC还通过从每台BCC接收的离散信号来判断BCC的工作状态是否有效。当BC从所有BCC的离散信号均表示相应的BCC失效时,表示允许该BC控制飞机舵面的控制指令有效性标识位例如从“0”设为“1”。
此外,如上所述,每个飞机舵面上的至少1台REU与某1台BCC以及BC连接,从BCC以及BC接收控制指令。对于执行从哪个设备或者计算机传送来的控制指令由REU进行判断,只有在REU判断为来自BCC的控制指令全部无效、且来自BC的控制指令有效性标识位“1”时,才会执行来自BC的控制指令。
<对操纵指令的表决和处理>
基本指令控制设备122的BCC和备份控制设备123的BC依据来自设于操纵器件的位置信号传感器的位置信号解算出操纵器件的行程指令并且一并所接收的形成指令进行表决,选择出最终的有效操纵指令。如上所述,在增强指令控制设备121有效(即有1台ACC工作)的情况下,基本指令控制设备122的BCC将该有效操纵指令发送至处于工作状态的ACC。
在本实施方式中,上述对操纵指令的表决和处理的流程如下。
首先,某1台BCC或BC接收到来自左右两侧操纵器件的位置信号,判断信号的有效性和正确性,并解算出操纵指令。
接着,由该台BCC或BC对同一侧操纵器件的位置信号和上一次接收到的位置信号进行比较,若两者间的差值的绝对值大于预先设定的阈值,则判定该侧位置信号不可用,直接使用另一侧的可用的位置信号;若两侧的位置信号均不可用,则直接退出对本次操纵指令的表决;若两侧的位置信号均可用,则判断两者间的差值是否大于预先设定的阈值,当差值的绝对值大于预先确定的阈值时直接退出对本次操纵指令的表决,反之则按照一定规则选择出一路有效的位置信号,并计算出操纵器件的行程。在此的一定规则可以是判断两个位置信号间的较大值、较小值、或是任选其中一个数值。
在直接控制类BCC退出本次表决的情况下,确认该BCC至此连续退出表决的次数,当该次数超过规定次数(例如可设为3次)时,在空中对该直接控制类BCC进行热启动。在热启动后,若该BCC再次退出表决,则判断为该BCC失效,飞行控制系统将其关闭。
在间接控制类BCC退出本次表决的情况下,同样地确认该BCC至此连续退出表决的次数,当该次数超过规定次数(例如可设为3次)时,禁止该BCC参与后续的指令表决。
在备份控制设备123的BC退出本次表决的情况下,同样地确认该BC至此连续退出表决的次数,当该次数超过规定次数(例如可设为3次)时,在空中对该BC进行热启动,由此,保证了只要该BC能够工作,就一定能够正确处理操纵指令,并进行对控制指令的正确计算。另外,为了保证飞行控制系统最基本的运行,即使后续BC再次退出表决也仍旧对其重启,允许其继续参与后续的表决。
4台BCC和BC将各自计算得出的操纵指令相互传送,来进行表决。在参与表决的未失效的计算机中查找操纵器件的位置信号一致的通道数量,并在查找结果中选择位置信号一致的通道数量最多的通道所对应的位置信号来作为最终的有效操纵指令。如上所述,当增强指令控制设备121有效时,将该有效操纵指令发送至增强指令控制设备121。若增强指令控制设备121失效,则由处于工作状态的BCC对上述有效操纵指令做内部处理。
此外,在包括BCC和BC在内的参与表决的未失效的计算机的数量为偶数、且对操纵器件的位置信号一致的通道数量的查找结果持平(例如为2:2)的情况下,不允许BC参与此次表决,重新进行查找。
<对控制指令的表决和处理>
如上所述,在飞机处于正常飞控模式的情况下,基本指令控制设备122的BCC和备份控制设备123的BC对来自增强指令控制设备121的控制指令进行解算,并且一并对各自解算出的控制指令进行表决,来表决出有效控制指令。在飞机处于直接飞控模式的情况下,基本指令控制设备122的BCC和备份控制设备123的BC分别对有效操纵指令进行内部处理,计算出包括作为控制指令的作动器位置指令/速率指令,此后再一并对各自计算出的控制指令进行表决,来表决出有效控制指令。
在本实施方式中,上述对控制指令的表决和处理的流程如下。
4台BCC和BC将各自解算或计算出的作动器位置指令/速率指令相互传送,来进行表决。在参与表决的未失效的计算机中查找控制指令一致的通道数量,并在查找结果中选择控制指令一致的通道数量最多的通道所对应的控制指令作为最终的有效控制指令。此后,处于工作状态的BCC均将该有效控制指令发送给飞控作动装置130中的REU。
此外,在包括BCC和BC在内的参与表决的未失效的计算机的数量为偶数、且对控制信号一致的通道数量的查找结果持平(例如为2:2)的情况下,不允许BC参与此次表决,重新进行查找。
(对飞机舵面的驱动)
本发明的飞行控制系统能够应用于单通道飞机。图3是示意性示出将本发明的飞行控制系统应用于单通道飞机时的飞机舵面布局图,典型的单通道飞机的飞机舵面具有两块副翼、两块升降舵、一块方向舵和一块水平安定面。为了确保飞机的持续安全飞行与着陆,备份控制设备123的BC构成为至少能够控制单通道飞机的上述舵面中的两块副翼、两块升降舵和一块方向舵,以满足最小可接受控制要求。
此外,典型的单通道飞机通常采用三套独立的压力为1300psi的液压能源系统来驱动飞机舵面上的作动器。每套液压能源系统分别驱动不同的作动器。例如,在每块副翼由两个作动器驱动、每块升降舵由两个作动器驱动、方向舵由三个作动器驱动的情况下,由第1液压能源系统驱动右副翼外作动器、左升降舵外作动器和方向舵下作动器,由第2液压能源系统驱动右副翼外作动器、右升降舵外作动器和方向舵内作动器,由第三液压能源系统驱动左副翼内作动器、右副翼内作动器、左升降舵内作动器、右升降舵内作动器和方向舵上作动器。
在飞机的所有发动机停止运转的条件下由作为应急涡轮发电机组的冲压空气涡轮驱动第三液压能源系统的电动泵。因此,为了确保对飞机舵面的控制,本实施方式的飞行控制系统中的备份控制设备123的控制对象、即BC所连接的REU所控制的作动器均由上述第三液压能源系统供电。
在所有发动机停止运转的条件下,由冲压空气涡轮为115V重要应急交流汇流条供电,同时还经由28V重要应急直流汇流条而向BC及其连接的直接模式传感器供电。
本发明的飞行控制系统还能够应用于双通道飞机,典型的双通道飞机具有四块副翼、四块升降舵、两块方向舵和一块全动水平安定面。同样地,在将飞行控制系统应用于双通道飞机的情况下,为了确保飞机的持续安全飞行与着陆,备份控制设备123的BC构成为至少能够控制双通道飞机的上述舵面中的左内副翼、右内副翼、左内升降舵、右内升降舵和方向舵。
在双通道飞机的飞控作动装置130中与飞机舵面的数量相应地配设更多台REU和由REU控制的更多个作动器。典型的双通道飞机通常采用三套独立的压力为1300psi或者1500psi的液压能源系统来驱动飞机舵面上的作动器。与单通道飞机相比,双通道飞机中每套液压能源系统驱动的作动器相应地增加,但工作原理与单通道飞机相同,因此,不再赘述。
根据本实施方式的飞行控制系统,在飞机处于正常飞控模式或者处于直接飞控模式的情况下,飞行控制系统中的备份控制设备始终处于启动状态,从而在其他飞行控制设备均失效时能够使飞机立即进入备份模式,大幅缩短了飞机处于不可控状态的时间。并且,在飞机处于正常飞控模式或者处于直接飞控模式的情况下,备份控制设备始终参与对来自驾驶舱操纵装置的操纵指令的表决以及参与对用于控制飞机舵面的控制指令的表决,从而能够校验由备份控制设备自身接收的操纵指令以及生成的控制指令的可用性和正确性,由此,在其他飞行控制设备均失效时,能够确保由该备份控制设备生成有效的控制指令并确保基于该有效的控制指令对飞机舵面进行控制的准确性,实现飞机的持续安全飞行与着陆。
本发明的保护范围仅由权利要求限定。得益于本发明的教导,本领域技术人员容易认识到可将本发明所公开结构的替代结构作为可行的替代实施方式,并且可将本发明所公开的实施方式进行组合以产生新的实施方式,它们同样落入所附权利要求书的范围内。
- 飞行控制方法、控制装置、无人飞行器、飞行控制系统及存储介质
- 飞行控制系统、飞行控制方法和飞行器