一种基于人脸识别技术的老弱人群寻路导识装置及方法
文献发布时间:2023-06-19 10:19:37
技术领域
本发明涉及一种解决老弱人群寻路导识问题的装置及方法,尤其是涉及一种基于人脸识别技术,进行目标用户锁定,执行三维性的空间导识的寻路导识装置及方法。
背景技术
随着科技的进步,城市化进程的加快,地铁、商场、图书馆、医院等与生活息息相关的基础设施已成为人们生活的重要组成部分。封闭的地下环境、错综复杂的空间结构、繁杂多样的线路,使得老弱人群寻路问题越来越受到人们的关注。老弱人群包括老年人群和其他存在视力障碍或寻路障碍的人群。由于当前导识系统大多是依靠移动设备的APP导航系统,存在许多缺陷,例如无法满足老弱人群的寻路导识需求、无法带给用户良好的用户体验、不能通过判定老弱人群的身份信息规划针对性的用户路径等问题。
发明内容
本发明的上述技术问题主要是通过下述技术方案得以解决的:
一种基于人脸识别技术的老弱人群寻路导识装置,包括:视频采集模块、语音采集模块、空间扫描模块、人脸识别模块、智能云端处理模块、中央控制模块、无线传输模块、陀螺仪模块。其特征在于:
视频采集模块:采用深感摄像头,和其上置有的电源线、镜头、数据传输线及图像采集卡,数据传输线用于电连接摄像机和图像采集卡,所述深感摄像头用于收集目标用户的面容、体态、行为信息和获悉周围环境因素,采集的图像和视频信息通过中央控制模块上传至人脸识别数据库。
语音采集模块:通过对老弱用户人群的语音采集,读取目标用户的目的信息,通过中央控制模块上传至智能云服务器。
空间扫描模块:红外扫描仪对周围环境进行全局扫描,建立空间3D模型,深度感知环境因素,暂存至于中央控制模块的存储单元中。
GPS模块:定位寻路导识装置位置信息和采集目标用户位置信息。
人脸识别数据库:发明采用AI开放平台联网识别信息,采用Facebook研发的人脸识别库face-recognition进行人脸识别判断,匹配则锁定老弱用户人群。
智能云端处理模块:包括计算机视频处理模块,计算机视频处理模块涉及的算法包括滤波、去噪、边缘提取、结构光编码设计和识别、摄像机和结构光的标定、三维点云的获得和重构算法;所述智能云端处理模块对于上传至云端的物理信息进行译码计算,云端决策出最优解或方案,由中央控制模块执行。
中央控制模块:采用PLC可编程逻辑控制器,所有的物理量通过编码读取,由无线传输模块上传至云端,反馈完成后由中央控制器予以调度和执行。
无线传输模块:实现云端计算机与中央控制器的无限通信。
陀螺仪控制模块:掌握飞行设备的飞行姿态,监测飞行高度、速度等物理量,以自主规避障碍物,引导目标用户前往目的地。
上述中的寻路导识装置,所述智能导识模块包括硬件与软件构成,其中:
硬件组成包括:视频采集模块、语音采集模块、空间扫描模块、GPS模块、中央控制模块、陀螺仪模块、无线传输模块。
软件组成包括:人脸识别模块、智能云端处理模块。
上述中的寻路导识装置,所述人脸识别模块其特征在于,调用摄像头完成人物面容与肢体行为的采集,通过语音反馈获取目标用户的目的地信息,后台决策出最优的路径方案,飞行导识设备根据路径方案引导目标用户前往目的地;其中,实时可在后台监测目标用户的行为,客户端随时可以查看调取目标用户的位置信息;人脸检测采用一种结合传统人造特征HOG+HAAR与多层感知机的级联结构,面部特征点定位系统通过级联多个深度模型来回归两眼中心、鼻尖和两个嘴角位置;人脸识别模块采用多层卷积神经网络(CNN)来提取人脸特征。
上述中的寻路导识装置,所述人脸识别并行人重识别技术,其特征在于,包括:
步骤1,采集目标用户面部信息;飞行设备调用视频采集模块对人脸进行信息采集,提取用户面容信息。
步骤2,识别目标用户身份;将面容信息上传至云端,由云计算机访问数据库进行面容比对,确定目标用户身份并进行分类,分别是:
当系统判断目标用户身份未匹配成功,调度识别下一位用户;
当系统判断目标用户身份匹配成功,锁定该目标用户,转而进入服务阶段。
步骤3,锁定目标用户;人脸识别系统进行身份的确认,执行完成后由云端服务器采用行人重识别技术接管锁定目标用户。
步骤4,行人重识别技术锁定目标用户;根据采集的视频信息,通过云端计算机利用计算机视觉技术,判断图像或者视频序列中人物关键帧的偏移定位目标用户的下一步行为动作,并通过穿着、体态、发型等特征,识别不同场景中的同一目标用户。
上述中的飞行导识装置,所述空间扫描方法,其特征在于:由空间扫描模块扫描周围环境,建成3D模型,空间中感知三维位置信息,辅助GPS系统,在三维地图中定位目标用户实时位置,即(x,y,z)空间函数模型。
一种基于人脸识别技术的老弱人群寻路导识装置,其特征在于,包括:
步骤1,采集用户面部信息;飞行设备调用视频采集模块对人脸进行信息采集,提取目标用户面容信息。
步骤2,识别目标用户身份;将面容信息上传至云端,由云计算机访问数据库进行面容比对,确定目标用户身份并进行分类,分别是:
当系统判断目标用户身份未匹配成功,调度识别下一位用户;
当系统判断目标用户身份匹配成功,运用行人重识别技术锁定该目标用户。
步骤3,行人重识别技术锁定目标用户;根据采集的视频信息,通过云端计算机利用计算机视觉技术,判断图像或者视频序列中人物关键帧的偏移定位目标用户的下一步行为动作,并通过穿着、体态、发型等特征,识别不同场景中的同一目标用户。
步骤4,寻路导识装置悬停并接收目标用户的语音指令,上传至云端。
步骤5,云端计算机识别语句中的目的地信息,决策出最优路径,将路径方案传输给中央控制模块,统一调度寻路导识装置执行路径方案。
步骤6,路径引导过程中:
当寻路导识装置进入到陌生环境中时,调用空间扫描模块扫描周围环境信息,生成场所内的3D模型存储在云端数据中;
当寻路导识装置进入到存储环境中时,直接调取云端场所模型,进行导识工作。
此外,寻路导识装置还会结合GPS模块定位出二维位置信息,结合空间扫描模块和云端数据处理精准定位出三位位置信息,客户端可以随时查看监测目标用户状态。
步骤7,到达目标用户的目的地附近时,语音提醒目标用户:
若目标用户反馈未到达指定目的地,则重复步骤4、5、6,
若目标用户反馈到达指定目的地,则本次导航结束。
因此,本发明具有如下优点:(1)根据老弱用户人群的寻路需求,规划针对性的用户路径,具有更好的用户体验;(2)通过人脸识别系统实时识别用户,更为准确的获得当前用户位置信息,从而进行实时引导,避免了复杂的操作;(3)通过飞行导识设备进行引导用户到达指定位置,高效且便捷。
附图说明
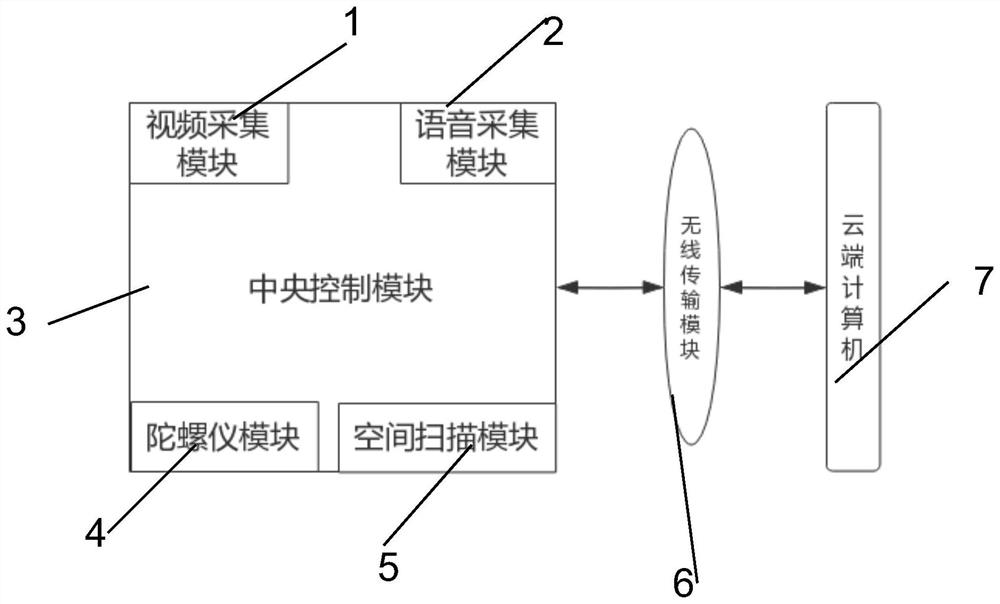
图1为一种基于人脸识别技术的老弱人群寻路导识装置结构示意图;
图2为一种基于人脸识别技术的老弱人群寻路导识装置使用方法流程图;
图3为一种陀螺仪模块结构示意图。
1、视频采集模块2、语音采集模块3、中央控制模块4、陀螺仪模块5、空间扫描模块6、无线传输模块7、云端计算机
具体实施方式
下面通过实施例,对本发明的技术方案作进一步具体的说明。
实施例:
一种基于人脸识别技术的老弱人群寻路导识装置,包括:视频采集模块、语音采集模块、空间扫描模块、人脸识别模块、智能云端处理模块、中央控制模块、无线传输模块、陀螺仪模块。其特征在于:
视频采集模块:采用深感摄像头,和其上置有的电源线、镜头、数据传输线及图像采集卡,数据传输线用于电连接摄像机和图像采集卡,所述深感摄像头用于收集目标用户的面容、体态、行为信息和获悉周围环境因素,采集的图像和视频信息通过中央控制模块上传至人脸识别数据库。
语音采集模块:通过对老弱用户人群的语音采集,读取目标用户的目的信息,通过中央控制模块上传至智能云服务器。
空间扫描模块:红外扫描仪对周围环境进行全局扫描,建立空间3D模型,深度感知环境因素,暂存至于中央控制模块的存储单元中。
GPS模块:定位寻路导识装置位置信息和采集目标用户位置信息。
人脸识别数据库:发明采用AI开放平台联网识别信息,采用Facebook研发的人脸识别库face-recognition进行人脸识别判断,匹配则锁定老弱用户人群。
智能云端处理模块:包括计算机视频处理模块,计算机视频处理模块涉及的算法包括滤波、去噪、边缘提取、结构光编码设计和识别、摄像机和结构光的标定、三维点云的获得和重构算法;所述智能云端处理模块对于上传至云端的物理信息进行译码计算,云端决策出最优解或方案,由中央控制模块执行。
中央控制模块:采用PLC可编程逻辑控制器,所有的物理量通过编码读取,由无线传输模块上传至云端,反馈完成后由中央控制器予以调度和执行。
无线传输模块:实现云端计算机与中央控制器的无限通信。
陀螺仪控制模块:掌握飞行设备的飞行姿态,监测飞行高度、速度等物理量,以自主规避障碍物,引导目标用户前往目的地。
上述中的寻路导识装置,所述智能导识模块包括硬件与软件构成,其中:
硬件组成包括:视频采集模块、语音采集模块、空间扫描模块、GPS模块、中央控制模块、陀螺仪模块、无线传输模块。
软件组成包括:人脸识别模块、智能云端处理模块。
上述中的寻路导识装置,所述人脸识别模块其特征在于,调用摄像头完成人物面容与肢体行为的采集,通过语音反馈获取目标用户的目的地信息,后台决策出最优的路径方案,飞行导识设备根据路径方案引导目标用户前往目的地;其中,实时可在后台监测目标用户的行为,客户端随时可以查看调取目标用户的位置信息;人脸检测采用一种结合传统人造特征HOG+HAAR与多层感知机的级联结构,面部特征点定位系统通过级联多个深度模型来回归两眼中心、鼻尖和两个嘴角位置;人脸识别模块采用多层卷积神经网络(CNN)来提取人脸特征。
上述中的寻路导识装置,所述人脸识别并行人重识别技术,其特征在于,包括:
步骤1,采集目标用户面部信息;飞行设备调用视频采集模块对人脸进行信息采集,提取用户面容信息。
步骤2,识别目标用户身份;将面容信息上传至云端,由云计算机访问数据库进行面容比对,确定目标用户身份并进行分类,分别是:
当系统判断目标用户身份未匹配成功,调度识别下一位用户;
当系统判断目标用户身份匹配成功,锁定该目标用户,转而进入服务阶段。
步骤3,锁定目标用户;人脸识别系统进行身份的确认,执行完成后由云端服务器采用行人重识别技术接管锁定目标用户。
步骤4,行人重识别技术锁定目标用户;根据采集的视频信息,通过云端计算机利用计算机视觉技术,判断图像或者视频序列中人物关键帧的偏移定位目标用户的下一步行为动作,并通过穿着、体态、发型等特征,识别不同场景中的同一目标用户。
上述中的飞行导识装置,所述空间扫描方法,其特征在于:由空间扫描模块扫描周围环境,建成3D模型,空间中感知三维位置信息,辅助GPS系统,在三维地图中定位目标用户实时位置,即(x,y,z)空间函数模型。
一种基于人脸识别技术的老弱人群寻路导识装置,其特征在于,包括:
步骤1,采集用户面部信息;飞行设备调用视频采集模块对人脸进行信息采集,提取目标用户面容信息。
步骤2,识别目标用户身份;将面容信息上传至云端,由云计算机访问数据库进行面容比对,确定目标用户身份并进行分类,分别是:
当系统判断目标用户身份未匹配成功,调度识别下一位用户;
当系统判断目标用户身份匹配成功,运用行人重识别技术锁定该目标用户。
步骤3,行人重识别技术锁定目标用户;根据采集的视频信息,通过云端计算机利用计算机视觉技术,判断图像或者视频序列中人物关键帧的偏移定位目标用户的下一步行为动作,并通过穿着、体态、发型等特征,识别不同场景中的同一目标用户。
步骤4,寻路导识装置悬停并接收目标用户的语音指令,上传至云端。
步骤5,云端计算机识别语句中的目的地信息,决策出最优路径,将路径方案传输给中央控制模块,统一调度寻路导识装置执行路径方案。
步骤6,路径引导过程中:
当寻路导识装置进入到陌生环境中时,调用空间扫描模块扫描周围环境信息,生成场所内的3D模型存储在云端数据中;
当寻路导识装置进入到存储环境中时,直接调取云端场所模型,进行导识工作。
此外,寻路导识装置还会结合GPS模块定位出二维位置信息,结合空间扫描模块和云端数据处理精准定位出三位位置信息,客户端可以随时查看监测目标用户状态。
步骤7,到达目标用户的目的地附近时,语音提醒目标用户:
若目标用户反馈未到达指定目的地,则重复步骤4、5、6,
若目标用户反馈到达指定目的地,则本次导航结束。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种基于人脸识别技术的老弱人群寻路导识装置及方法
- 一种基于人脸识别技术的室内导识装置及方法