一种辅助脑卒中患者恢复步态的柔性下肢康复机器人
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及医疗机器人技术领域,具体地,涉及一种辅助脑卒中患者恢复步态的柔性下肢康复机器人。
背景技术
随着我国人口老龄化加剧以及人们生活方式的改变,脑卒中疾病已经超过肿瘤、冠心病等成为全国死亡人数、致残人数第一的疾病,且该病每年发病率平均增幅高达9%。在全世界超过3300万的脑卒中患者中80%的患者在接受相关治疗后仍然会存有步态障碍后遗症。脑卒中或偏瘫等多致上运动神经元受损,往往易出现步进过程中的足内翻、足下垂、步幅减小、步速缓慢、双腿姿态不对称等问题。相关研究数据表明,早期50%的脑卒中患者不能完成步行动作,仅37%可独立步行。通过亚急性期及之后系统科学的康复训练,具有异常步态的患者中能独立步行的人数可减少50%左右。这意味着及时的步态康复训练对于患者病况缓解具有较为突出的作用。步态康复是运动神经系统康复的主要核心目标之一,恢复自然且健康的步态是患者重返正常生活和工作的有力保证。
传统康复训练以康复医师为主,需程序化一对一康复治疗。长时间的训练不但会引起康复医师的疲劳感,也会使康复训练过程低效低质,并且缺乏有效监测数据和反馈数据,最终难以评估康复的效果。为减少康复医师的劳动量,增加康复训练的科学性、高效性和准确性,下肢康复机器人成为一种科学的新趋势,也是未来康复治疗的必然发展方向。对于轻瘫或腿部轻度肌无力的患者,下肢外骨骼无需对肢体起支撑作用,只需提供适量大小辅助力矩即可。此时,柔性康复机器人相对于传统刚性下肢康复机器人,能够体现巨大优势和潜力。首先适用于更多生活场景的扩展物理治疗,改善行走速度慢、易疲劳或髋关节伸屈受限的人群行走能力;其次,因其柔性套装可提供更高舒适度、安全性和适应性,具有更高的自由度以及重量轻等优点。
其中,现有线驱动的柔性外骨骼的功能较单一,存在只能对某一单关节进行运动辅助或需牺牲自重以多电极协同控制多关节,以及控制方法较简单等问题。经过对现有技术的检索发现,公开号CN108992313A的中国专利公开了“一款软性下肢助力外骨骼”,主要以两个传动部分别辅助踝关节背屈和跖屈,通过主动轮机构设计可同时收进第一传动部的同时放出第二传动部,实现交替控制,并且通过辅助力阈值限制控制操作安全。但该机构只对踝关节进行了辅助,而对于髋关节屈曲受限的患者步态康复而言,对髋关节的适度辅助也同样重要。
进一步检索发现,公开号为CN108670195A的中国专利公开了“用于辅助人体运动的软机器护甲”,该装置通过柔性元件布置,利用力的传递关系使得恢复力矩能够抵达髋部,实现辅助行走,减少步行代谢和关节负载的作用。但该机构的设计更多是针对普通人群,没有考虑患有步态异常人群的需求,并且忽略了步行中踝关节的背伸。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种辅助脑卒中患者恢复步态的柔性下肢康复机器人。
为解决上述难题,本发明提供一种辅助脑卒中患者恢复步态的柔性下肢康复机器人,包括:
柔性外骨骼套装;所述柔性外骨骼套装包括髋关节-腰部固定模块、踝关节固定模块和被动弹性模块;其中,
所述髋关节-腰部固定模块包括用于包裹于腰部的腰部束带和用于包裹大腿部位的大腿部位柔性套装,且所述大腿部位柔性套装与所述腰部束带连接;所述腰部束带设有位于患者侧腿正中面的髋关节前侧的第一固定锚点;所述大腿部位柔性套装设有位于患者侧大腿正中面前侧的第二固定锚点;
所述踝关节固定模块包括用于包裹小腿部位的小腿部位柔性套装和用于包裹足部的足套;所述小腿部位柔性套装设有位于患者小腿正中面后侧的第三固定锚点;所述足套设有位于患者跟骨位置正中面后侧的第四固定锚点;
所述被动弹性模块设置于所述踝关节固定模块上,所述被动弹性模块依靠步行时人体动作变换而被动改变长度,并在被动拉长阶段储能以及在无驱动阶段释放势能恢复原长,实现辅助患者踝关节的背屈;
驱动执行模块,所述驱动执行模块包括驱动控制模块和第一柔性鞘套式传动模块、第二柔性鞘套式传动模块;所述第一柔性鞘套式传动模块与所述第一固定锚点、所述第二固定锚点连接;所述第二柔性鞘套式传动模块分别与所述第三固定锚点、所述第四固定锚点连接;所述驱动控制模块控制所述第一柔性鞘套式传动模块和所述第二柔性鞘套式传动模块,调整所述第一固定锚点与所述第二固定锚点之间的间距,以及所述第三固定锚点与所述第四固定锚点之间的间距,以辅助患者实现髋关节屈曲和踝关节跖屈。
优选地,所述驱动控制模块包括:
具有容置空间的驱动控制盒外壳;
设置于所述容置空间内的驱动执行机构;所述驱动执行机构的输入端与驱动控制机构连接,所述驱动执行机构的输出端与所述第一柔性鞘套式传动模块和所述第二柔性鞘套式传动模块连接;
设置于所述容置空间内的驱动控制机构,所述驱动控制机构的第一输入端与远程PC主机连接并进行通讯,所述驱动控制机构的输出端与所述驱动执行机构的输入端连接,接收外部指令并根据所接收的外部指令驱动所述驱动执行机构执行控制动作,带动所述第一柔性鞘套式传动模块和所述第二柔性鞘套式传动模块传动,并作用于所述髋关节-腰部固定模块和所述踝关节固定模块;
与所述驱动控制机构的第二输入端连接的传感采集装置,用于采集人体在运动过程中的力信息以及人体步行中踝关节的旋转角度信息并将采集的数据传递给所述驱动控制机构。
优选地,所述驱动控制机构包括:
AD采集卡,获取所述传感采集装置采集的数据信号;
微型计算机,用于将所述远程PC主机处理得到的数据进行处理并传递给电机控制器,并将所述AD采集卡获取的数据信号传递至所述远程PC主机;
电机控制器;所述电机控制器的输入端与所述微型计算机的输出端连接,所述电机控制器的输出端与所述驱动执行机构的电机连接,将接收到的处理结果转换为电机运动参数传递给所述驱动执行机构的电机。
优选地,所述驱动执行机构包括:
从动机构;所述从动机构包括从动齿轮、旋转轴、第一轴承端盖、第一支撑机构、滑轮组、第二支撑机构和第二轴承端盖;
其中,所述从动齿轮、所述第一支撑机构、所述滑轮组及所述第二支撑机构依次轴向连接于所述旋转轴上,所述从动齿轮驱动所述旋转轴做旋转运动,带动所述滑轮组进行同步转动,使所述从动齿轮与所述滑轮组保持相对静止,且所述从动齿轮与所述滑轮组具有相同的角速度;所述滑轮组设有用于缠绕钢丝的两个不同半径的圆柱侧面区域;
所述第一支撑机构、所述第二支撑机构用于支撑所述旋转轴,并分别通过轴承与所述旋转轴连接,保证所述从动机构径向的稳定;所述第一轴承端盖设置于所述第一支撑机构的前方;所述第二轴承端盖设置于所述第二支承机构的后方,为保证所述从动机构轴向的稳定;
主动机构;所述主动机构包括主动齿轮、固定盖、电机、减速器和固定底座;
其中,电机轴向连接所述减速器,所述电机和所述减速器固定于所述固定盖与所述固定底座构成的空间内;所述电机与所述主动齿轮连接,所述电机在接受到驱动信号之后转动,驱动所述主动齿轮转动,从而啮合带动所述从动齿轮进行旋转。
优选地,所述传感采集装置包括:
用于读取所述髋关节-腰部固定模块上钢丝线的受力信号的第一张力传感机构;所述第一张力传感机构包括第一辅助滑轮、第一单滑轮张力传感器、第一张力传感基底和第二辅助滑轮;其中,所述张力传感基底与水平方向呈夹角设置于所述驱动控制盒外壳的容置空间内,所述第一辅助滑轮、所述第一单滑轮张力传感器和所述第二辅助滑轮固定于所述第一张力传感基底上;所述第一单滑轮张力传感器会受到钢丝线垂直于所述第一张力传感基底方向的压力,并计算得到所述髋关节-腰部固定模块上钢丝线上的拉力;
用于读取所述踝关节固定模块上钢丝线的受力信号的第二张力传感机构;所述第二张力传感机构与所述第一张力传感机构的结构相同;
张力传感换能器;所述张力传感换能器将所述第一张力传感机构、所述第二张力传感机构读取的力信号转化为电信号,再传递给所述AD采集卡得到数字信号。
优选地,所述第一柔性鞘套式传动模块、所述第二柔性鞘套式传动模块均包括:
柔性套管;
与所述柔性套管的一端连接的第一柔性鞘套端口;
与所述柔性套管另一端连接的第二柔性鞘套端口,所述第二柔性鞘套端口与所述第一固定锚点、所述第三固定锚点连接;
钢丝线,所述钢丝线一端穿入所述柔性套管的管内并可在管内自由拉动,所述钢丝线的一端依次从所述第一张力传感器、所述第二张力传感器的第一辅助滑轮下侧穿过,从所述第一张力传感器、所述第二张力传感器的单滑轮张力传感器的上侧穿过,以及从所述第一张力传感器、所述第二张力传感器的第二辅助滑轮下侧穿过,并与所述滑轮组连接;
设置于所述钢丝线另一端的钢丝线端口,所述钢丝线端口与所述第二固定锚点、所述第四固定锚点连接。
优选地,所述大腿部位柔性套装与所述腰部束带通过魔术贴连接;
所述大腿部位柔性套装包括第一固定基底、第一固定织带及固定插扣;所述第一固定织带设置于所述第一固定基底上;所述第一固定织带的端部设有用于固定的固定插扣,能通过所述第一固定织带调整所述第一固定基底的周向尺寸,以匹配不同患者的大腿部尺寸。
优选地,所述小腿部位柔性套装包括:
第二固定基底,能沿周向包裹所述小腿部位;
设置于所述第二固定基底上部、下部的第二固定织带;所述第二固定织带的端部设有用于固定的调节扣;通过所述第二固定织带能调节所述第二固定基底的周向尺寸,以匹配不同患者的小腿尺寸。
优选地,所述被动弹性模块包括:
所述第一拉簧;所述第一拉簧的一端通过第一固定机构与所述足套固定,并位于脚背位置;
与所述第一拉簧并排设置的所述第二拉簧;所述第二拉簧通过所述第一固定机构与所述足套固定,并位于脚背位置;
拉力传感器;所述拉力传感器通过第二固定机构与所述小腿部位柔性套装固定,并位于小腿胫骨上方,用以采集所述第一拉簧、所述第二拉簧的拉力;
连接机构,用于拉力传感器与所述第一拉簧、所述第二拉簧的另一端连接。
优选地,所述驱动控制模块还包括拉力传感换能器;所述拉力传感换能器将所述拉力传感器采集的拉力转化为电信号。
与现有技术相比,本发明具有如下至少一种的有益效果:
本发明上述机器人,对于肌力在3级-5级的不完全瘫痪或轻瘫的步态异常的患者,在电机带动柔性鞘套式传动模块的收放以及被动弹性装置的协同下可在康复训练过程中起到补偿和助力作用,可满足多关节辅助需求的同时保证设备的轻便特性,使患者步进过程中肌肉异常代偿的情况得以改善,并且减少步行代谢消耗,有利于患者恢复正常步态,减少肌肉的异常代偿,并能同时辅助踝关节背屈与跖屈、髋关节屈曲。
本发明上述机器人,柔性穿戴套装易穿脱,易携带,占用空间较小,较于传统刚性外骨骼舒适度较高;适配不同体型的穿戴者,安全可靠。
本发明上述机器人,驱动模块设计在满足安全和功能需求的范围内实现了小型化和轻质化,充分利用结构空间,将主要的驱动机构与电机及减速器、电机控制器、张力传感器及其对应换能器、微型计算机、AD采集卡等电子部件合理布置并集成于驱动控制模块内。
本发明上述机器人,通过模块化设计和3D打印技术个性化定制固线滑轮组半径比,可方便快速更换,以适配不同情况的异常步态患者,根据需要可以分别在髋部和踝部提供不同大小的辅助力,适用人群更加广泛。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
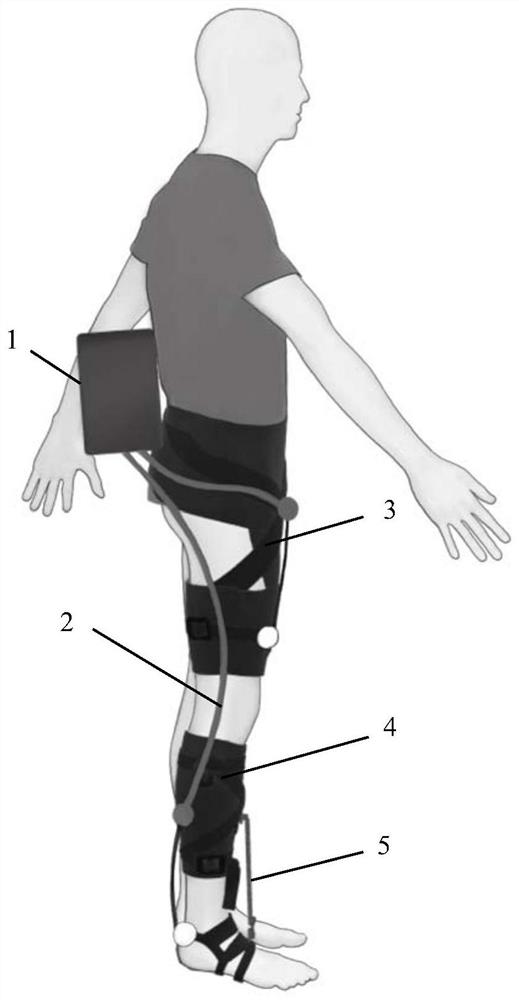
图1是本发明一优选实施例的辅助脑卒中患者恢复步态的柔性下肢康复机器人的整体结构示意图;
图2a是本发明一优选实施例的驱动控制模块的局部示意图;
图2b是本发明一优选实施例的驱动控制模块的内部示意图;
图3是本发明一优选实施例的驱动执行机构局部示意图;
图4是本发明一优选实施例的主动机构局部示意图;
图5是本发明一优选实施例的驱动控制机构局部示意图;
图6是本发明一优选实施例的传感采集装置的局部示意图;
图7是本发明一优选实施例的柔性鞘套式传动模块的局部示意图;
图8是本发明一优选实施例的髋关节-腰部固定模块的局部示意图;
图9是本发明一优选实施例的踝关节固定模块的局部示意图;
图10是本发明一优选实施例的被动弹性模块的局部示意图。
图中标记分别表示为:1为驱动控制模块、2a为第一柔性鞘套式传动模块、2b为第二柔性鞘套式传动模块、21为第一柔性鞘套端口、22为柔性套管、23为第二柔性鞘套端口、24为钢丝线、25为钢丝线端口、3为髋关节-腰部固定模块、31为第一固定基底、32为固定插扣、33为第一固定织带、4为踝关节固定模块、41为第二固定基底、42为第二固定织带、43为第一调节扣、44为第二调节扣、5为被动弹性模块、51为第一固定结构、52为第一拉簧、53为第二拉簧、54为连接结构、55为拉力传感器、56为第二固定结构、11为驱动控制盒外壳、112为底板、113为后侧板、114为顶板、12为驱动执行机构、121为从动机构、122为主动机构、1211为从动齿轮、1212为第一轴承端盖、1213为第一支撑机构、1214为滑轮组、1215为第二支撑机构、1216为第二轴承端盖、1221为主动齿轮、1222为固定盖、1223为电机、1224为减速器、1225为固定底座、13为驱动控制机构、131为微型计算机、132为AD采集卡、133为电机控制器、14为传感采集装置、141为第一张力传感机构、142为第二张力传感机构、143为拉力传感换能器、144为张力传感换能器、1411为第一辅助滑轮、1412为第一单滑轮张力传感器、1413为第一张力传感基底、1414为第二辅助滑轮、1421为第三辅助滑轮、1422为第二单滑轮张力传感器、1423为第二张力传感基底、1424为第四辅助滑轮。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
参照图1所示,为本发明一优选实施例的辅助脑卒中患者恢复步态的柔性下肢康复机器人的整体结构示意图;是一款能够多关节辅助下肢异常步态人群康复的柔性外骨骼机器人。
图中包括柔性外骨骼套装和驱动执行模块;柔性外骨骼套装包括髋关节-腰部固定模块3、踝关节固定模块4和被动弹性模块5;其中,髋关节-腰部固定模块3包括用于包裹于腰部的腰部束带和用于包裹大腿部位的大腿部位柔性套装,且大腿部位柔性套装与腰部束带连接为一体;腰部束带设有位于患者侧腿正中面的髋关节前侧的第一固定锚点;大腿部位柔性套装设有位于患者侧大腿正中面前侧的第二固定锚点。
踝关节固定模块4包括用于包裹小腿部位的小腿部位柔性套装和用于包裹足部的足套;小腿部位柔性套装设有位于患者小腿正中面后侧的第三固定锚点;足套设有位于患者跟骨位置正中面后侧的第四固定锚点。踝关节固定模块4设有用于采集踝关节的旋转角度信息(角度、角加速度信号)陀螺仪;穿戴踝关节固定模块4后,陀螺仪(未画出)通过魔术贴固定于小腿冠状面。
被动弹性模块5设置于踝关节固定模块4上,被动弹性模块5仅依靠步行时人体动作变换而被动改变长度,并在被动拉长阶段储能以及在无驱动阶段释放势能恢复原长,实现补充辅助患者踝关节的背屈(旋转)。
驱动执行模块包括驱动控制模块1和第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b;第一柔性鞘套式传动模块2a与第一固定锚点、第二固定锚点连接;第二柔性鞘套式传动模块2b分别与第三固定锚点、第四固定锚点连接;驱动控制模块1通过控制第一柔性鞘套式传动模块2a和第二柔性鞘套式传动模块2b传动,从而调整第一固定锚点与第二固定锚点之间的间距,以及第三固定锚点与第四固定锚点之间的间距,以辅助患者实现髋关节屈曲和踝关节跖屈。
在一具体实施例中,上述各个模块之间可以通过以下方式进行连接:驱动控制模块11可以整体置于人体背部,通过设置在髋关节-腰部固定模块3和踝关节固定模块4处的若干固定锚点控制第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b,从而在步进过程中分别辅助髋关节和踝关节的旋转。
在其他部分优选实施例中,驱动控制模块1包括:驱动控制盒外壳11、驱动执行机构12、驱动控制机构13和传感采集装置14。
其中,参照图2a所示,驱动控制盒外壳11具有容置空间;驱动控制盒外壳11为实现轻质的特性,选用聚乳酸型塑料材料制作成型。作为一优选方式,驱动控制盒外壳11由底侧板、左侧板、右侧板、前侧板、后侧板113和上侧板构成一封闭的长方体结构,并将六块板通过内六角螺栓彼此固定;其中,参照图2a所示,将前侧板设置为镂空结构以助散热。右侧板可以用于固定第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b的末端,起到连接和支撑固定作用。
参照图2b所示,驱动执行机构12设置于容置空间内。作为一优选方式,可以将驱动执行机构12通过内六角螺栓固定在驱动控制盒外壳11的底侧板。驱动执行机构12的输入端与驱动控制机构13连接,驱动执行机构12的输出端与第一柔性鞘套式传动模块2a和第二柔性鞘套式传动模块2b连接。驱动控制机构13也设置于容置空间内。作为一优选方式,将驱动控制机构13可以通过内六角螺栓固定在驱动控制盒外壳11的左侧板及后侧板113。驱动控制机构13的第一输入端与远程PC主机(图中未示出)连接并进行通讯,驱动控制机构13的输出端与驱动执行机构12的输入端连接,接收外部指令并根据所接收的外部指令驱动驱动执行机构12执行控制动作,带动第一柔性鞘套式传动模块2a和第二柔性鞘套式传动模块2b传动,并作用于髋关节-腰部固定模块3和踝关节固定模块4。
传感采集装置14与驱动控制机构13的第二输入端连接,用于采集人体在运动过程中的力信息。陀螺仪采集人体步行中踝关节的旋转角度信息。并将采集的数据传递给驱动控制机构13,作为下一步控制的参考。作为一优选方式,可以将传感采集装置14通过内六角螺栓固定在驱动控制盒外壳11的上侧板上。
在其他部分优选实施例中,参照图5所示,驱动控制机构13包括AD采集卡132、微型计算机131和电机控制器133;其中,
AD采集卡132获取传感采集装置14采集的数据信号,以及获取陀螺仪采集步行中踝关节角度、角加速度信号。
微型计算机131将远程PC主机处理得到的数据进行处理并传递给电机控制器133,并将AD采集卡132获取的力信号和角度、角加速度信号传递回远程PC主机。
电机控制器133的输入端与微型计算机131的输出端连接,电机控制器133的输出端与驱动执行机构12的电机连接,将接收到的处理结果转换为电机运动参数传递给驱动执行机构12的电机。
作为一优选方式,参照图5所示,驱动控制机构13的各部件可以采用以下连接方式与驱动控制盒外壳11固定。微型计算机131和AD采集卡132固定于驱动控制盒外壳11的左侧板112,电机控制器133固定于驱动控制盒外壳11的后侧板113上。
在其他部分优选实施例中,参照图3所示,驱动执行机构12包括从动机构121和主动机构122;将从动机构121和主动机构122均设置于驱动控制盒外壳11的底板112上,并通过内六角螺栓固定。主动机构122带动从动机构121转动,主要通过齿轮咬合带动从动齿轮1211的旋转。
参照图3所示,从动机构121包括从动齿轮1211、旋转轴、第一轴承端盖1212、第一支撑机构1213、滑轮组1214、第二支撑机构1215和第二轴承端盖1216;
其中,从动齿轮1211、第一支撑机构1213、滑轮组1214及第二支撑机构1215依次轴向连接于旋转轴上。从动齿轮1211驱动旋转轴作旋转运动,带动滑轮组1214进行同步转动,使从动齿轮1211与滑轮组1214保持相对静止,且从动齿轮1211与滑轮组1214具有相同的角速度;作为一优选方式,从动齿轮1211设有键槽通过装配可固定于旋转轴(图中未示出)上。滑轮组1214同样通过键槽固定于旋转轴上。
滑轮组1214设有两个半径不同的圆柱侧面区域,分别用于缠绕连接于第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b中钢丝线24。实现单独电机同时辅助髋关节和踝关节的旋转,无需设置多个电机。为实现个性化配置以满足不同情况患者的步态康复,滑轮组1214的半径比可更改并由3D打印机定制打印。通过拆卸第二支撑机构1215、第二轴承端盖1216后即可实现快速更换。
第一支撑机构1213、第二支撑机构1215用于支撑旋转轴,保证了从动机构121径向的稳定,并架高于底板112一定高度。第一支撑机构1213、第二支撑机构1215均内置有轴承,分别通过轴承与旋转轴连接,保证旋转轴能进行转动运动;第一轴承端盖1212设置于第一支撑机构1213的前方;第二轴承端盖1216设置于第二支撑机构1215的后方,保证从动机构121轴向的稳定。
参照图4所示,主动机构122包括主动齿轮1221、固定盖1222、电机1223、减速器1224和固定底座1225;其中,电机1223轴向连接减速器1224。作为一优选方式,电机1223可以采用含有含编码器的直流伺服电机。将电机轴和减速器1224装配后,置于固定盖1222与固定底座1225构成的柱状空间内,并可通过内六角螺栓固定,保证电机轴向和径向固定。电机1223与主动齿轮1221连接,电机1223在接受到驱动信号之后会转动,从而带动主动齿轮1221转动,并啮合带动从动齿轮1211进行旋转。在一具体实施例中,主动机构122可以采用以下工作参数:主动齿轮1221与从动齿轮1211的齿轮比为1:1.7,减速器1224的减速比为26:1,最终得到的总传动比大约为45:1。经计算直流伺服电机输出负载扭矩符合实际需要。
在其他部分优选实施例中,参照图6所示,传感采集装置14包括第一张力传感机构141、第二张力传感机构142和张力传感换能器144。第一张力传感机构141用于读取髋关节-腰部固定模块3上钢丝线24的受力信号。
参照图6所示,第一张力传感机构141包括第一辅助滑轮1411、第一单滑轮张力传感器1412、第一张力传感基底1413和第二辅助滑轮1414;其中,第一张力传感基底1413与水平方向呈夹角设置于驱动控制盒外壳11的容置空间内,第一辅助滑轮1411、第一单滑轮张力传感器1412和第二辅助滑轮1414固定于第一张力传感基底1413上;第一单滑轮张力传感器1412会受到钢丝线24垂直于第一张力传感基底1413方向的压力,并计算得到髋关节-腰部固定模块3上钢丝线24上的拉力。作为一优选方式,第一辅助滑轮1411、第一单滑轮张力传感器1412、第二辅助滑轮1414均通过标准螺丝固定在第一张力传感基底1413上;第一张力传感基底1413以水平方向30°固定在驱动控制盒外壳11的顶板114上。
第二张力传感机构142用于读取踝关节固定模块4上钢丝线24的受力信号。同样,参照图6所示,第二张力传感机构142包括第三辅助滑轮1421、第二单滑轮张力传感器1422、第二张力传感基底1423、第四辅助滑轮1424。第二张力传感机构142与第一张力传感机构141的结构相同。第二张力传感机构142各部件的固定方式与第一张力传感机构141相同。
第一张力传感机构141和第二张力传感机构142,分别穿过经过滑轮组1214的第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b中钢丝线24。第一柔性鞘套式传动模块2a中钢丝线24首先从第一张力传感器141的第一辅助滑轮1411下侧穿过,再从第一单滑轮张力传感器1412的上侧穿过,最后再通过第二辅助滑轮1414下侧穿过。第二柔性鞘套式传动模块2b中钢丝线24从第二张力传感机构142的第三辅助滑轮1421下侧穿过,再从第二单滑轮张力传感器1422的上侧穿过,最后再通过第四辅助滑轮1424下侧穿过。
张力传感换能器144将第一张力传感机构141、第二张力传感机构142读取的力信号转化为电信号,再传递给AD采集卡132得到数字信号。作为一优选方式,张力传感换能器144置于第一张力传感机构141夹角空间内的顶板114上;同理,在第二张力传感器142的下方也同样对应设置张力传感换能器144(图中未示出)。
张力传感机构测力原理为:以第一张力传感机构141为例,三个滑轮(第一辅助滑轮1411、第一单滑轮张力传感器1412和第二辅助滑轮1414)均为定滑轮,定滑轮上线的各处拉力相同;通过以上穿线方法,第一单滑轮张力传感器1412会受到钢丝线垂直于第一张力传感基底1413方向的压力,根据力的分解原理与勾股定理即可计算出钢丝线上的拉力。第二张力传感机构142与上述第一张力传感机构141的原理相同。由此第一张力传感器141和第二张力传感器142分别得到第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b中钢丝线24的受力,钢丝线24另一端固定在柔性外骨骼套装上,因此可以间接得到人体受驱动控制机构13控制过程中髋关节与踝关节受力的变化。
在其他部分优选实施例中,本发明中,针对髋关节与踝关节,分别需要独立的第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b。第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b的结构均相同。
以第一柔性鞘套式传动模块2a为例,参照图7所示,第一柔性鞘套式传动模块2a包括柔性套管22、第一柔性鞘套端口21、第二柔性鞘套端口23、钢丝线24和钢丝线端口25;其中,柔性套管22为一种可弯曲不可拉伸的螺旋金属层,在螺旋金属层的外表面设有一层橡胶材料。第一柔性鞘套端口21放置于驱动控制盒外壳11的右侧板中,并通过螺丝固定防止脱落,第一柔性鞘套端口21固定在柔性套管22的一端。第二柔性鞘套端口23固定在柔性套管22的另外一端,并且通过弹性尼龙绳固定于在柔性外骨骼套装上,分别在髋关节-腰部固定模块3的患者侧腿正中面的髋关节前侧(第一固定锚点)和踝关节固定模块4的小腿正中面后侧处(第三固定锚点)。
钢丝线24的线径小于柔性套管22内径,并穿梭在柔性套管22管内,可以在其中自由拉动。钢丝线24的一端固定在执行执行机构12的滑轮组1214上,由电机控制器133控制驱动电机1223带动滑轮组1214的转动,继而钢丝线24穿过传感采集装置14的第一张力传感机构141(或第二张力传感机构142),再通过固定于驱动控制盒外壳11的右侧板的第一柔性鞘套端口21,经柔性套管22穿出;钢丝线24的另一端为钢丝线端口25,固定于髋关节-腰部模块3的患者侧大腿正中面前侧(第二固定锚点)和踝关节固定模块4的跟骨位置正中面后侧处(第四固定锚点)。
第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b的工作原理如下:穿戴柔性外骨骼机器人时,由于人体下肢各部位带有自重,钢丝线24在运动过程中始终保持拉紧的状态。每当驱动电机1223顺时针转动,带动从动机构121中滑轮组1214逆时针转动,此时钢丝线24进行放线操作,即第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b的第二柔性鞘套端口到钢丝线端口之间的间距会增大,意味着髋关节-腰部模块3中髋关节与大腿正中面固定锚点之间距离增大,踝关节固定模块4中小腿与跟骨位置处固定锚点之间距离增大;驱动电机1223逆时针转动,带动从动机构121中滑轮组1214顺时针转动,此时钢丝线24进行收线操作,即第一柔性鞘套式传动模块2a、第二柔性鞘套式传动模块2b的第二柔性鞘套端口到钢丝线端口之间的间距会减小,意味着髋关节-腰部模块3中髋关节与大腿正中面固定锚点之间距离减小,踝关节固定模块4中小腿与跟骨位置处固定锚点之间距离减小。因滑轮组1214直径不同,转动引起的长度变化即不同,因为可以实现对钢丝线24不同线速度的控制,达到不同关节不同辅助力的目的。不论是髋关节或踝关节,固定锚点间距离减小,根据人体关节角变化可知关节角度也将被动减小,反之关节角增大时固定锚点间距增大。因此在步行过程中,控制钢丝线24的收放操作可以实现不同步进阶段的控制,如可在需要辅助髋关节与踝关节时进行收线,由驱动电机1223提供辅助力;在无需辅助髋关节与踝关节时进行放线,以防阻碍关节角的变大,并不再提供辅助力。
在其他部分优选实施例中,大腿部位柔性套装与腰部束带通过魔术贴连接,通过魔术贴将两种部位连接在一起,穿戴时覆盖髋关节但不影响髋关节活动。在腰部束带的连接端设置魔术贴,使腰部束带包裹于腰部。
参照图8所示,大腿部位柔性套装包括第一固定基底31、第一固定织带33及固定插扣32;第一固定织带33设置于第一固定基底31上;第一固定织带33的端部设有用于固定的固定插扣32,能通过第一固定织带33调整第一固定基底31的周向尺寸,以匹配不同患者的大腿部尺寸。作为一种较优方式,将第二柔性鞘套端口23与钢丝线端口25也固定于第一固定织带33上,穿戴时均保证位于正中面即可。
作为一优选方式,第一固定基底31和腰部束带基底可以采用较为厚实且透气的聚酯纤维、合成橡胶等材料制成,穿戴时不影响髋关节活动。固定织带可以采用尼龙制成。固定插扣32可以采用塑料制成。
在其部分优选实施例中,参照图9所示,小腿部位柔性套装包括:第二固定基底和两个第二固定织带42和调节扣;其中,
踝关节固定基底能沿周向包裹小腿部位;
在第二固定基底41上部、下部的第二固定织带42;第二固定织带42的端部分别设有用于固定的第一调节扣43、第二调节扣44;通过第二固定织带42能调节第二固定基底41的周向尺寸,以匹配不同患者的小腿尺寸。作为一优选方式,第二柔性鞘套端口23(未示出)可利用魔术贴固定于踝关节固定基地41上,固定位置根据穿戴随时调整,保证位于小腿正中面背侧即可;钢丝线端口固定于足套的跟骨位置即可。
作为一优选方式,第二固定基底41可以采用聚酯纤维、合成橡胶等材料制成,包括在第二固定基底41上设置魔术贴,帮助固定并包裹小腿部位,对膝盖无影响。
在具体实施时上述柔性外骨骼套装的设计不限于以上形式,仅需保证舒适度和固定功能,并且不会限制主要关节的自由度和旋转范围即可,第二柔性鞘套端口23和钢丝线端口25的固定位置设计也可以根据步行过程中各关节输出关节力矩变化进行调整,如在本发明基础上,可以扩展增加步态支撑相末期对膝关节的辅助,添加新的柔性鞘套式传动模块固定于大腿和小腿正中面后侧,并修改驱动控制模块1的滑轮组1214,增加适合膝关节运动的滑轮尺寸。
在其他部分优选实施例中,参照图10所示,被动弹性模块5包括第一固定结构51、第一拉簧52、第二拉簧53、连接结构54、拉力传感器55、第二固定结构56构成。第一结构51固定在足套(未示出)的脚背位置处,同时并行固定了第一拉簧52和第二拉簧53,紧接着连接连接结构54,并由内六角螺栓固定。连接结构54还连接着拉力传感器55(S型微型拉力传感器),可测得被动弹性装置的拉力。拉力传感器55由第二固定结构56固定在踝关节固定模块4的小腿胫骨上方处。该被动弹性装置5通过驱动阶段克服弹力做功进行储能,并在无驱动阶段即“放线”的过程放能辅助踝关节背屈运动,缓解因背屈肌无力造成的异常,使患者的脚在摆动期能够被动保持一定的离地高度,恢复步进中廓清机制,帮助踝关节的背屈。
在其他部分优选实施例中,驱动控制模块1包括拉力传感换能器143,并将拉力传感换能器143集成于传感采集装置14。拉力传感换能器143读取拉力传感器55采集的拉力信号并转化为电信号,再传递给AD采集卡132得到数字信号。
上述实施例利用柔性套装设计、驱动机构设计以及控制和传感模块搭建,实现一款能够多关节辅助下肢异常步态人群康复的柔性外骨骼机器人,能够保证安全性,具有轻便、高自由度、易携带等优势。上述主要针对右腿进行辅助,针对左腿的辅助仅需要将柔性外骨骼套装做镜像对称的设计,也可以增加一个相似的驱动控制模块1将下肢康复机器人扩展为支持双腿的康复外骨骼。
上述实施例的辅助脑卒中患者恢复步态的柔性下肢康复机器人在工作时:柔性套装时可根据患者不同体型调节魔术贴、固定插扣以及束带位置以贴合不同维度的腰部、大腿以及小腿的情况。穿戴外骨骼机器人,首先分别穿戴髋关节-腰部固定模块3和踝关节固定模块4,最后固定被动弹性模块5,借助柔性鞘套式传动模块2在特定位置设置固定锚点将驱动控制机构13和柔性外骨骼套装连接在一起,将驱动控制机构13与电源通过电气连接实现电机的运转,上电后驱动电机首先根据预设固定值运动,再根据传感采集装置14获得的力信息和角速度、角加速度信息调整控制参数,直到达到稳定的控制过程。监护人员可以在PC端的交互界面实现对辅助频率和辅助力的大小进行调节,相应达到对电机的控制参数进行调整。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质。
- 一种辅助脑卒中患者恢复步态的柔性下肢康复机器人
- 一种辅助脑卒中患者恢复步态的柔性下肢康复机器人