一种基于参考梁法的微纳力值标准测量装置及其溯源方法
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及微小力值计量测试领域,尤其涉及一种基于参考梁法的微纳力值标准装置及其溯源方法。
背景技术
随着科学的不断发展与国际单位制的重大变革,测试计量技术不断向纳米级和亚纳米级的方向进行拓展,微纳加工与微纳检测技术,已成为当前科学研究的热点内容,几十年来,微小力值测量技术取得了迅猛的发展。然而,微小力值的量值溯源体系还没有完全被建立。国内尚缺少溯源到SI单位的(nN-mN)范围的计量标准装置和有效的溯源方法。
力值的溯源方法可分为两种,基于静电力的力值溯源和基于质量比较仪的力值溯源。而基于质量比较仪的力值溯源方法,主要是借助于有一定刚度的物体,如微悬臂梁、摆盘实现。其溯源体系在于,高精度的质量比较仪与质量基准进行比对,质量与当地重力加速度的乘积,即为力值。通过微悬臂梁等刚体与质量比较仪相接触,从而实现了力值的进一步传递,将质量比较仪的产生的力值通过悬臂刚度与位移偏转(即挠度)的乘积表示出来。但是,由于质量比较仪的精度有限,并存在一定的零点漂移,因此无法保证100nN以下力值的准确性。这时候就需要通过微悬臂梁等刚体,从而实现更高精度的力值溯源。
微悬臂梁传感器是原子力显微镜(AFM)的力学感应单元,是连接宏观与微观力学的重要工具。微悬臂梁由于具备成本低、体积小、灵敏度高等优点而在生产制造、科学研究、生物医疗等方面有着广泛的应用,是高精度和高灵敏度的传感器的理想的选择。也是实现微小力值溯源的重要工具之一。
微悬臂梁分为AFM悬臂与tipless悬臂两种。其区别在于AFM悬臂下端有一针尖,该悬臂多用于检测表面形貌等。微悬臂梁的刚度检测方法有以下几种:精密天平法、参考梁法、附加质量法、压痕仪法和热噪声法等等。在以上方法中,只有精密天平法和参考梁法具有量值溯源性,而多数基于微悬臂梁刚度的力值溯源的方法均采用精密天平法进行。然而,基于天平法对力值溯源,存在着标定时间过长、加载位置偏差等的问题,且需要逐个对微悬臂梁进行标定,过程较为繁琐,耗费时间过长。而传统的参考梁法也存在着不确定度过高和精度过低的问题,其测量不确定度高达20%。
发明内容
为克服现有技术的天平法探针加载偏差问题与参考梁法带来的不确定度过高的问题,本发明提供一种基于参考梁法的微纳力值标准装置及其溯源方法,通过精密天平法标定已知悬臂,已知悬臂是带有十字刻线的无探针悬臂,可称为tipless悬臂,并通过参考梁法将tipless悬臂与被测悬臂,也称为AFM悬臂相互接触,从而确定AFM悬臂的刚度值。本发明采用悬臂位置粗调单元对已知刚度和被测的悬臂在XYZ轴位移方向进行调整,并通过零件的定位部分降低了直线度误差,提高定位精度。精调部分采用的压电陶瓷微动台,具有导向功能,确保在整个测量过程中,两悬臂的受力方向始终与垂直方向一致;采用图像处理单元对两悬臂在互压时的状态进行实时捕捉和处理,确保被测悬臂的探针尖端与已知悬臂的十字刻线中心处于竖直方向的对齐状态;在溯源方法中被测悬臂的刚度通过已知悬臂的刚度进行标定,而已知刚度的悬臂利用专利CN104266792A所述的装置进行标定,包括电磁补偿天平刚度和被测微悬臂的安装角度修正微悬臂弹性常数,利用微力传感器的安装角度修正微力传感器力值灵敏度等。
本发明的创新点在于首次提出将精密天平法与参考梁法相结合,首次使用图像处理的方法标定参考梁悬臂刚度,由于刚度已知的悬臂自身就具有很低不确定度的刚度值(不确定度低于1.2%),被测悬臂通过这种高精度悬臂进行标定,可以显著降低不确定度故能够取得更高的精确度。
为解决上述技术问题,本发明采用的技术方案如下:
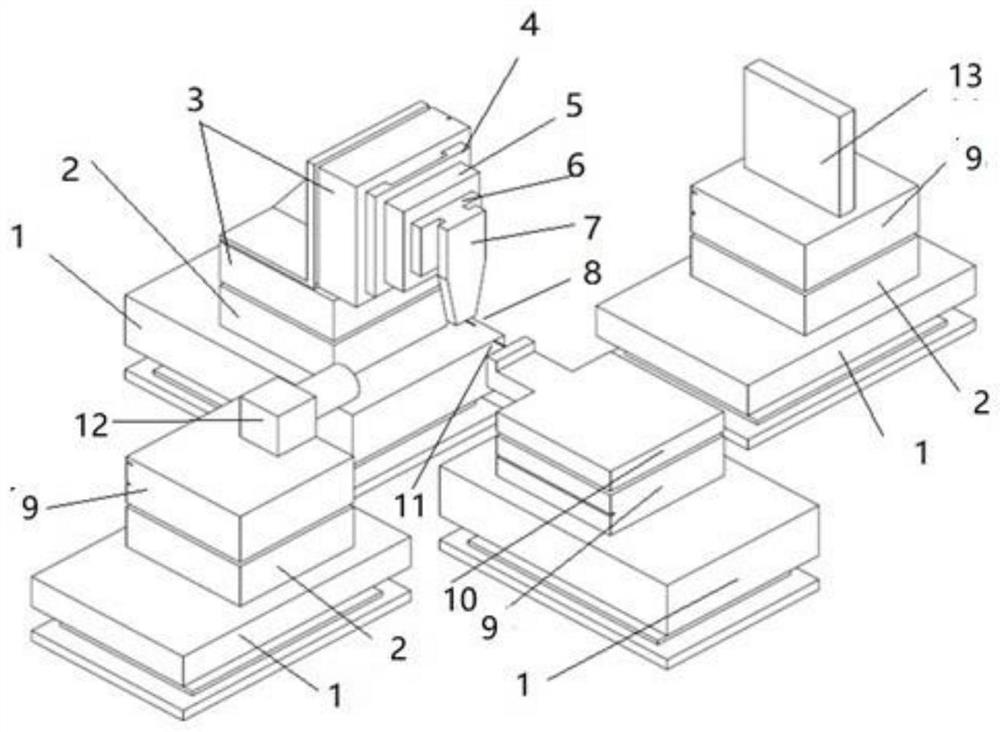
一种基于参考梁法的微纳力值标准装置,包括待测的AFM微悬臂梁(简称被测悬臂(8)),被固定在第一安装杆(7)上。纳米微动台(5),通过转接件2(6)和第一安装杆(7)与被测悬臂(8)相连,用于使被测悬臂(8)能沿Z轴作直线运动,从而与已知刚度悬臂(11)相互接触。被测悬臂位置粗调单元,与所述纳米微动台(5)相连,用于实现微动台在X轴、Y轴、Z轴方向位移调整以及角度调整;已知悬臂位置粗调单元,与被测悬臂位置粗调单元相对,用于调整已知刚度悬臂(11)X轴、Y轴和Z轴方向位移,保证已知悬臂的探针十字刻线中心处于被测悬臂针尖正下方。CCD相机(12),位于所述被测悬臂位置粗调单元侧边,用于实时显示已知悬臂和被测悬臂的位置状态。
所述被测悬臂位置粗调单元由自上而下依次连接的三维位移台(3)、手动角位移台(2),以及升降台(1)组成。
所述已知悬臂位置粗调单元由二维位移台(9)和升降台(1)组成,二维位移台(9)用于改变XY方向的位置,升降台(1)用于调节高度。
所述控制计算单元,由控制模块、采集模块与图像处理模块组成,所述控制模块用于驱动控制微动台(5)的位移;所述采集模块用于采集所述相机镜头捕捉的影像;所述图像处理模块,用于通过图像锐化、阈值分割、边缘提取和边缘检测方式,对所采集的图像进行处理,从而分别得到两悬臂的运动过程中的像素点变化,计算出被测悬臂刚度值。
CCD相机(12)和线阵光源(13)均安装在水平观测调整单元上,由水平观测调整单元调整高度、角度和水平位移;
所述的水平观测调整单元,由升降台(1)、角位移台(2)和二维位移台(9)组成,用于调节CCD相机(12)和线阵光源(13)的高度、角度和水平位移。线阵光源(13),与CCD相机(12)镜头相对,两悬臂位于镜头与光源中间,镜头、悬臂与光源位于同一光轴处。
所述已知臂梁(11)的材质为单晶硅。
所述纳米微动台(5)通过上位机界面进行对位移的控制。
进一步,设置了隔振光学平台,用于放置所述纳米微动台、已知悬臂位置粗调单元、被测悬臂位置粗调单元、水平观测调整单元和线阵光源(13)。
进一步,设置了密封罩,位于所述隔振光学平台上,用于罩住所述纳米微动台、已知悬臂位置粗调单元、被测悬臂位置粗调单元、水平观测调整单元和线阵光源(13)。
所述线阵光源(13)与一8位光强控制器相连,用于调节光照强度。
本发明还提供一种基于参考梁法的微纳力值标准装置,对被测微悬臂的弹性常数或微力传感器的力值灵敏度进行溯源的方法,包括以下步骤:
通过精密天平法对tipless悬臂(11)的刚度进行标定,用作已知悬臂的测试,在标定过程中,天平测头恰好加载至tipless悬臂十字刻线中心。
调整CCD相机(12)的高度和线阵光源(13)的亮度,并使用分辨率板USAF1951对所用CCD相机(12)进行像素标定,确定像素与位移的数量关系。
调整已知悬臂位置粗调单元,使已知悬臂(11)与相机和光源位于同一光轴上,通过相机可观察到已知悬臂(11)的清晰影像;
调整被测悬臂位置粗调单元,使得已知悬臂的影像清晰度与被测悬臂清晰度一致,且此被测悬臂恰好在已知悬臂的上方,被测悬臂的探针尖端与已知悬臂的十字刻线中心在竖直方向对齐,悬臂靠近但不相互接触,相机拍下此时的悬臂位置影像;
通过控制计算单元的控制模块,驱动与被测悬臂(8)相连的纳米微动台(5),使得该纳米微动台(5)带动被测悬臂(8)沿着Z轴方向运动,得两悬臂相互接触并产生弹性变形;
采集纳米微动台(5)和CCD相机(12)影像的输出数据,通过边缘检测、角点检测等方式对图像进行处理,并根据S1步骤标定的像素点确定已知悬臂位移,从而通过参考梁法的公式验证结论,实现力值溯源。
采集两悬臂发生接触变形前后的影像,可以通过控制悬臂周期运动进行多次采集,由于已知悬臂是较为规则的矩形悬臂,易于进行特征提取。因此通过对该悬臂进行边缘提取与检测,从而可以获得上下两边缘中心点纵坐标,通过计算发生位移前后已知悬臂中心点坐标差值,即可获得该悬臂的像素点及位移。通过标定过程中的位移于像素点之间的关系确定被测悬臂的刚度值。其刚度值可用如下关系式来表示:
k
其中,k
通过标定,本发明所用相机,1μm=6.0064像素点。被测悬臂标称刚度为0.11N/m
现将本发明的实验测试结果公布如下
由此可见,该方法具有很好的标定效果,其测量不确定度可控制在5%以内。
通过阅读说明书,本领域普通技术人员将更好地了解这些技术方案的特征和内容。
有益效果
本发明的有益效果在于,提出了一种AFM微悬臂梁探针标定的系统和方法。降低了天平法直接标定AFM悬臂探针的不确定度,同时通过CCD影像,提高了参考梁法的测量精度。极大降低了由于传统的参考梁法易于滑动、接触点不准确等问题引起的偏差。
附图说明
图1是本发明的测量装置示意图
图2是本发明的悬臂位置关系示意图
图3是本发明的溯源方法与体系流程图
1:升降台 2:角位移台 3:三维位移台
4:转接件1 5:纳米微动台 6:转接件2
7:第一安装杆 8:被测悬臂 9:二维位移台
10:第二安装杆 11:已知悬臂 12:CCD相机
13:线阵光源
具体实施方式
如图1所示,本发明提供一种基于参考梁法的微纳力值标准装置,包括:已知刚度的悬臂(11),该悬臂为tipless悬臂,其端部有一十字刻线,用于确定加载位置。该悬臂刚度通过专利CN104266792A所述装置测得,并被固定在第二安装杆(10)上。第二安装杆(10)被固定在已知悬臂位置粗调单元的上方。
已知悬臂位置粗调单元包括:升降台(1)、二维位移台(9)。升降台(1)用于调整已知悬臂(11)Z向高度,二维位移台(9)用于调整已知悬臂(11)的X、Y方向位移。
被测悬臂(8),被固定在第一安装杆(7)上。纳米微动台(5)通过转接件2(6)与第一安装杆(7)相连。该纳米微动台(5)的量程为100微米,通过驱动软件控制梁被测悬臂(8)沿着Z轴做直线运动,实现悬臂位置的微调和微米级别的互压。
被测悬臂位置粗调单元,包括三维位移台(3)、角度位移台(2)、以及升降台(1)。其中,所述三维位移台(3),与所述纳米微动台(5)通过转接件1(4)相连,用于实现纳米微动台(5)在X轴、Y轴、Z轴方向位移调整,其量程为50mm;所述角度位移台(2),在三维位移台(3)正下方,用于调整被测悬臂(8)的角度,其量程为±10°;所述升降台(1),在角度位移台(2)正下方,用于粗调纳米微动台(5)的高度,其量程为60mm。通过该部分的调整,保证被测悬臂的针尖位于已知悬臂的十字刻线中心的正上方,其示意图如图2所示。
CCD相机(12),位于所述被测悬臂位置粗调单元侧边,用于实时显示所述的已知悬臂(11)和被测悬臂(8)的位置状态;
线阵光源(13),与CCD相机(12)相对,被测悬臂(8)与已知悬臂(11)位于镜头与光源中间,镜头、悬臂与光源位于同一光轴处。
水平观测调整单元,由升降台(1)、角位移台(2)和二维位移台(9)组成,用于实现高度、角度和水平位移的调节。
CCD相机(12)和线阵光源(13)均安装在水平观测调整单元上,由水平观测调整单元调整高度、角度和水平位移;
图中未显示的装置有:隔振光学平台,用于放置所述纳米微动台(5)、已知悬臂位置粗调单元、未知悬臂位置粗调单元、水平观测调整单元和LED背光光源等。密封罩,位于所述隔振光学平台上,用于罩住所述纳米微动台、已知悬臂位置粗调单元、未知悬臂位置粗调单元、水平观测调整单元和LED背光光源,从而保护测量装置减少空气流的干扰。
图中未显示的测量单元为:控制计算单元,由控制模块、采集模块与图像处理模块组成,该控制模块用于驱动控制微动台(5)的位移;该采集模块用于采集纳米微动台(5)的相对位置和保存此时显示的悬臂的图像;该图像处理模块,用于通过边缘检测、阈值分割和角点检测等方式,对所采集的图像进行处理,从而分别得到两悬臂的运动过程中的像素点变化,计算出被测悬臂刚度值。
基于上述系统,本发明还提出了一种基于参考梁法的微纳力值标准测量装置的溯源方法,包括以下步骤:
S1:通过专利CN104266792A所述的装置对已知悬臂(11)进行刚度标定,通过分辨率板USAF1951对实验所用CCD相机(12)进行像素标定,确定像素与位移的数量关系。
S2:分别调节已知悬臂位置粗调单元与CCD相机(12)下面的水平观测调整单元,寻找已知悬臂(11)在相机上的成像位置,保证已知悬臂(11)可以成像在相机的焦平面上,确定已知悬臂(11)与CCD相机(12)在X方向上的距离,保证已知悬臂(11)的Z向高度与Y向位移均在CCD相机(12)的视野范围内。
S3:如图2所示,调节被测悬臂位置粗调单元,保证两悬臂在X方向位于CCD相机(12)焦平面上,Y方向被测悬臂(8)的探针尖端与已知悬臂(11)的十字刻线中心对齐,Z方向两悬臂处于靠近但不接触的状态。且均成像在CCD相机(12)的视野范围内。
S4:通过控制计算单元的控制模块,驱动与被测悬臂(8)相连的纳米微动台(5),使得该纳米微动台(5)带动被测悬臂(8)沿着Z轴方向上下运动,从而与已知悬臂(11)相接触并产生挠曲变形。通过控制计算单元的图像采集模块和CCD相机,记录悬臂在运动过程中的不同位置的影像。
S5:采集纳米微动台(5)和CCD相机(12)影像的输出数据,通过边缘检测方式对图像进行处理,并根据S1步骤标定的像素点确定已知悬臂位移,从而通过参考梁法的公式对被测悬臂进行刚度计算;
S6、根据所获得的悬臂刚度实现力值溯源。溯源过程为公知常识,此处不再赘述,详情见图3.
注意事项:
1、由于该装置纳米微动台量程为100μm,相机的放大倍数对该实验测量结果影响较大,为保证实验结果的可靠性,需要使用的相机放大倍数达到5倍以上。
2、在参考梁法中,悬臂移动的位移是与其刚度成正比的,因此刚度相差越大,其运动过程中的位移相差越大,这越不利于力值溯源。为保证实验所用两悬臂的刚度值应相差3倍以内。
3、当悬臂运动的位移过大时,此时被测的AFM悬臂不仅仅会发生纵向位移,而且会发生偏转,这对测量结果影响极大。且当两悬臂之间作用力过大时,已知悬臂同样会发生角度偏转。因此需要保持在测量过程中,被测悬臂的位移变化在50μm以内。最好在30μm以内,这样可以保证所用已知悬臂梁的偏转角度不超过1°,从而角度偏转带来的影响可以忽略。
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种基于参考梁法的微纳力值标准测量装置及其溯源方法
- 一种基于参考梁法的微纳力值标准测量装置