采用无人机监理道面特征的方法、系统、终端和存储介质
文献发布时间:2023-06-19 10:24:22
技术领域
本申请涉及道面检测的技术领域,尤其是涉及一种用于机场道面病害检测的方法、系统、终端和存储介质。
背景技术
飞机场道面是指在天然土基和基层顶面用筑路材料铺筑的一层或多层的人工结构物,是供飞机起飞、着陆、滑行及维修、停放的坪道。由于载荷因素和环境因素的反复作用,道面结构在使用过程中会逐渐产生损坏,出现各种病害现象,机场道面病害检测主要是为了检测机场跑道道面病害,并进行保养维护。
目前,道面检测有采用无人机进行检测,但是,采用无人机检测道面通常只对道面进行图像采集和超声波检测,检测结果有局限,不便于工作人员对道面进行维护。
发明内容
为了改善不便于工作人员对道面进行维护的问题,本申请提供一种采用无人机监理道面特征的方法、系统、终端和存储介质。
第一方面,本申请提供一种采用无人机监理道面特征的方法,采用如下的技术方案:
一种采用无人机监理道面特征的方法,包括:
根据待检测道面为无人机设计检测航线,将检测航线划分为若干子路线;
将每一所述子路线对应的道面区域均沿延航线方向划分为若干区块;
控制所述无人机沿检测航线飞行并进行图像采集和超声波检测,以得到影像数据和超声波数据,根据影像数据计算得到道面纹理深度数据;
在每段子路线对应的道面区域内均获取一个区块标记为下降区块;
当所述无人机到达下降区块所对应的区域时,控制所述无人机在当前下降区块下降,并对所述当前下降区块进行摩阻检测,以得到与所述当前下降区块对应的摩阻检测数据;
在得到与所述当前下降区块对应的摩阻检测数据后,控制所述无人机上升到所述当前下降区块对应的下降点,继续按照航线对道面进行图像采集和超声波检测;
在得到与所述当前下降区块对应的影像数据和超声波数据后,判断所述当前下降区块对应的超声波数据和摩阻检测数据是否异常;
当判断所述当前下降区块内的某个路段的摩阻数据和超声波数据均异常且摩阻数据异常的路段覆盖超声波数据异常的路段时,对所述当前下降区块的摩阻数据异常对应的路段进行标记;
根据预设的计算模型对所述当前下降区块内的标记路段沿航线向前后延伸,将延伸后的标记路段标记为异常道面段;
根据所述待检测道面所对应的影像数据、超声波数据、摩阻检测数据和异常道面段得到检测结果。
通过采用上述技术方案,无人机对道面进行裂缝检测,并在每条子路线中抽取一个区块进行摩阻检测,节省检测时间,并且当检测到摩阻检测数据异常的路段覆盖超声波数据异常的路段时,对该路段沿航线向前后延伸并标记为异常道面段,以便后期对异常道面段进行摩阻复检,避免因道面裂缝使摩阻检测结果出现误差,提高检测结果的可靠性。
可选的,所述在每段子路线对应的道面区域内获取一个区块标记为下降区块,具体包括:
读取当前子路线对应的道面区域内每个区块的历史摩阻检测次数;
当检测到所述当前子路线对应的道面区域内有唯一的区块的历史摩阻检测次数为最小值,则将该唯一的历史摩阻检测次数为最小值的区块判定为下降区块;
当检测到所述当前子路线对应的道面区域内有若干个区块的历史摩阻检测次数均为最小值,则在所述若干个历史摩阻检测次数均为最小值的区块中随机抽取某区块并判定为下降区块。
通过采用上述技术方案,采用更科学的计算方式获取下降区块,保证每条子路线对应的道面区域内每个区块被摩阻检测的次数相近,提高摩阻检测数据的全面性。
可选的,所述根据预设的计算模型对所述当前下降区块内的标记路段沿航线向前后延伸,将延伸后的标记路段标记为异常道面段,具体包括:
获得数据库中与所述当前下降区块对应的历史摩阻检测数据;
根据获得的历史摩阻检测数据以当前标记路段为基准,获取所述当前下降区块内的标记路段沿航线方向的前后范围内的摩阻数据异常点的分布信息;
根据所述摩阻数据异常点的分布信息和预设的判断标准,获取所述摩阻数据异常点的疏密度信息;
根据所述摩阻数据异常点的疏密度信息,获取以当前标记路段为基准的沿航线方向上前后摩阻数据异常点的密集区;
将标记路段以及所述密集区对应的道面标记为异常道面段。
通过采用上述技术方案,根据摩阻数据异常点的疏密度,以当前标记路段为基准沿航线方向上前后划分摩阻数据异常点的密集区,从而确定异常道面段,划分异常道面段的规则更加科学,为摩阻复检提供一个准确的范围,提高摩阻复检数据的可靠性。
可选的,所述方法还包括:
当检测到所述无人机按照预设的航线完成检测时,控制所述无人机按照检测航线返回;
当所述无人机返回到达异常道面段时,控制所述无人机在当前异常道面段下降到指定高度;
当所述无人机下降到指定高度后,控制所述无人机对当前异常道面段进行摩阻复检以得到与所述当前异常道面段对应的摩阻复检数据;
当得到所述当前异常道面段的摩阻复检数据后,控制所述无人机直线上升并按照所述检测航线继续返回。
通过采用上述技术方案,控制无人机在返航过程中对异常道面的进行摩阻复检,无需后期工作人员对异常道面段进行专门的摩阻复检,省时省力。
可选的,在得到与所述当前异常道面段对应的摩阻复检数据之后,将所述当前异常道面段对应的摩阻复检数据覆盖所述当前道面段对应的摩阻检测数据。
通过采用上述方案,将摩阻复检数据覆盖对应的摩阻检测数据,无需工作人员后期重新整理数据,节省时间的同时可以避免数据出现错误。
可选的,在所述控制所述无人机直线上升并按照所述检测航线继续返回之前,还包括:
控制所述无人机在所述当前异常道面段的端点处喷射溶剂。
通过采用上述技术方案,后期工作人员对异常道面段进行维护时,地面上溶剂形成的标记为工作人员提供一个显目的定位。
可选的,在根据所述待检测道面所对应的影像数据、超声波数据、道面纹理深度数据、摩阻检测数据和异常道面段得到检测结果之后,还包括:
根据所述影像数据和所述坐标点集获取每一道面病害区域的具体图像;
根据所述检测结果,判断每一道面病害区域对应的道面病害种类;
将每一所述道面病害区域对应的坐标点集、道面病害种类和道面病害区域的具体图像均进行整合,生成道面病害明细表。
通过采用上述技术方案,当工作人员调取出病害明细表后,可以更有针对性地对道面病害做出评估,并且可以导出保存到本地,便于随时查看。
第二方面,本申请提供一种采用无人机监理道面特征的系统,采用如下的技术方案:
一种采用无人机监理道面特征的系统,采用如下的技术方案:
规划模块,用于根据待检测道面为无人机设计检测航线,将检测航线划分为若干子路线;
划分模块,用于将每一所述子路线对应的道面区域均沿延航线方向划分为若干区块;
裂缝检测模块,用于控制所述无人机沿检测航线飞行并进行图像采集和超声波检测,以得到影像数据和超声波数据,根据影像数据计算得到道面纹理深度数据;
第一标记模块,用于在每段子路线对应的道面区域内均获取一个区块标记为下降区块;
摩阻检测模块,当所述无人机到达下降区块所对应的区域时,用于控制所述无人机在当前下降区块下降,并对所述当前下降区块进行摩阻检测,以得到与所述当前下降区块对应的摩阻检测数据;
上升模块,用于在得到与所述当前下降区块对应的摩阻检测数据后,控制所述无人机上升到所述当前下降区块对应的下降点,继续按照航线对道面进行图像采集和超声波检测;
判断模块,在得到与所述当前下降区块对应的影像数据和超声波数据后,判断所述当前下降区块对应的超声波数据和摩阻检测数据是否异常;
计算模块,用于当判断所述当前下降区块内的某个路段的摩阻数据和超声波数据均异常且摩阻数据异常的路段覆盖超声波数据异常的路段时,对所述当前下降区块的摩阻数据异常对应的路段进行标记;
第二标记模块,用于根据预设的计算模型对所述当前下降区块内的标记路段沿航线向前后延伸,将延伸后的标记路段标记为异常道面段;
整合数据模块,根据所述待检测道面所对应的影像数据、超声波数据、摩阻检测数据和异常道面段得到检测结果。
通过采用上述技术方案,后台管理中心通过裂缝检测模块和摩阻检测模块,控制无人机对道面进行拍摄、超声波检测和摩阻检测,并根据检测数据进行计算判断,提高无人机监理道面特征的可靠性。
第三方面,本申请提供一种智能终端,采用如下的技术方案:
一种智能终端,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如上述任一种方法的计算机程序。
通过采用上述技术方案,无人机在终端与后台管理中心建立连接,后台管理中心根据无人机在终端发出的请求执行各种操作和处理,并将处理结果反馈给无人机,从而实现无人机对道面进行检测。
第四方面,本申请提供一种计算机可读存储介质,采用如下的技术方案:
一种计算机可读存储介质,存储有能够被处理器加载并执行如上述任一种方法的计算机程序。
通过采用上述技术方案,当所述计算机可读存储介质被装入任一计算机后,所述任一计算机就能执行本申请提供的一种采用无人机监理道面特征的方法。
综上所述,本申请包括以下至少一种有益技术效果:
1.采用无人机监理道面特征的方法,能够对道面进行摩阻检测,并且对摩阻数据与超声波数据均显示异常的道面进行单独标记,以供后期复检,方便了工作人员对机场道面进行维护,
2.控制无人机在按航线检测完成后对异常道面段进行复检,无需工作人员对道面进行二次检测,减少工作人员的工作量;
3.得到检测结果后,生成道面病害明细表,以供工作人员可以随时查看。
附图说明
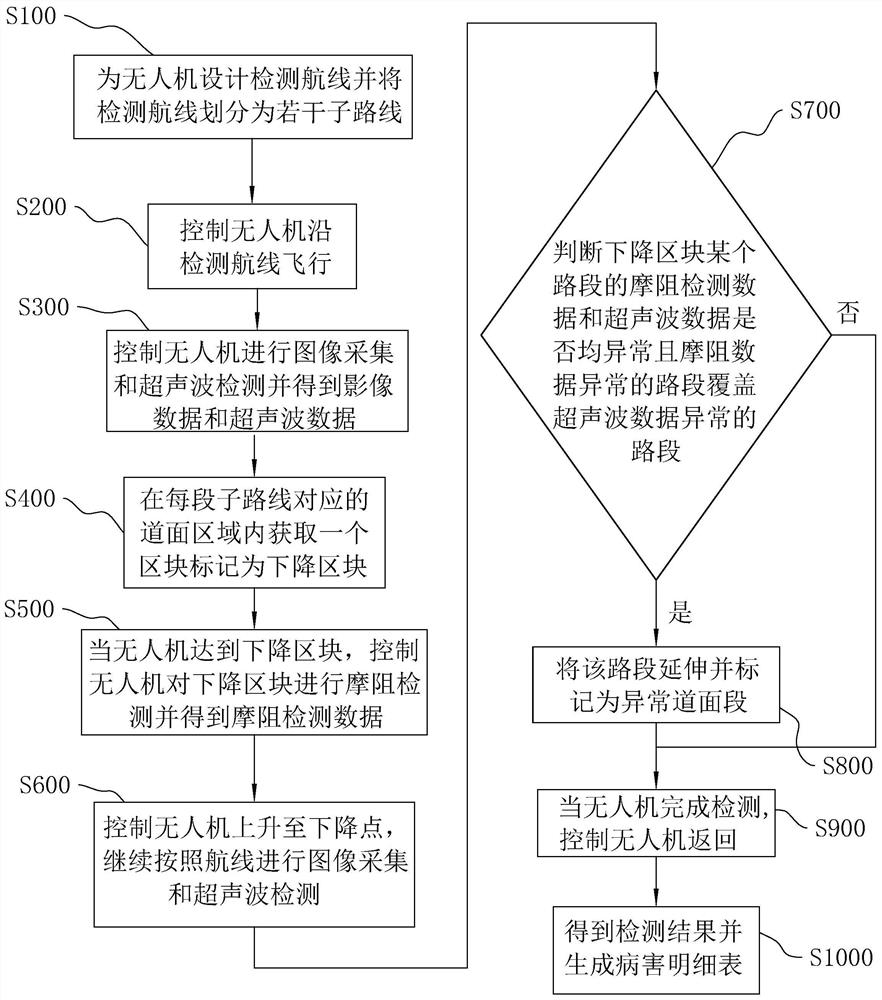
图1是本申请实施例的采用无人机监理道面特征的方法的流程示意图。
图2是本申请实施例的采用无人机监理道面特征的方法中获取异常道面段的流程示意图。
图3是本申请实施例的采用无人机监理道面特征的方法中控制无人机对异常道面段进行复检的流程示意图。
图4是本申请实施例的获取异常道面段的示意图。
图5是本申请实施例的采用无人机监理道面特征的系统的结构框图。
图中,1、规划模块;2、划分模块;3、检测模块;31、裂缝检测模块;32、第一标记模块;33、摩阻检测模块;34、上升模块;35、判断模块;36、计算模块;37、第二标记模块;4、数据整合模块。
具体实施方式
以下结合附图1-5对本申请作进一步详细说明。
本申请实施例公开一种采用无人机监理道面特征的方法。参照图1,采用无人机监理道面特征的方法包括:
S100:为无人机设计检测航线并将检测航线划分为若干子路线。
其中,检测航线根据具体待检测道面设计。当某段机场道面距上次检测的时间超过预设的时长,则为无人机设计检测航线,并且根据检测航线的长度及走向,将检测航线划分为若干子路线。
S200:控制无人机沿检测航线飞行。
S300:控制无人机进行图像采集和超声波检测并得到影像数据和超声波数据,根据影像数据计算得到道面纹理深度数据。
其中,图像采集具体为沿检测航线在道面上设置若干像控点,并保证像控点分布均匀,控制无人机根据像控点按照检测航线对机场道面进行拍摄以得到超声波数据;超声波检测具体为控制无人机上的超声波仪器持续对道面发射超声波,并根据接收的反射超声波得到超声波数据;道面纹理深度数据可根据影像数据计算获取。
S400:在每段子路线对应的道面区域内获取一个区块标记为下降区块。
其中,下降区块具体根据当前子路线对应的道面区域内每个区块的历史摩阻检测次数判断,当检测到当前子路线对应的道面区域内有唯一的区块的历史摩阻检测次数为最小值,则将该唯一的历史摩阻检测次数为最小值的区块判定为下降区块,当检测到所述当前子路线对应的道面区域内有若干个区块的历史摩阻检测次数均为最小值,则在所述若干个历史摩阻检测次数均为最小值的区块中随机抽取某区块并判定为下降区块。
S500:当无人机达到下降区块,控制无人机对下降区块进行摩阻检测并得到摩阻检测数据。
其中,摩阻检测具体为控制无人机下降到适合的水平高度,使无人机上的摩阻检测仪与道面接触,并且无人机带动摩阻检测仪在道面上滑动,直至完成对当前下降区块的摩阻检测,从而得到摩阻检测数据。
S600:控制无人机上升至下降点,继续按照航线进行图像采集和超声波检测。
其中,控制无人机上升至下降点具体为控制无人机上升返回至当前下降区块对应的下降点。返回到下降点后,控制无人机继续按照航线飞行以对当前下降区块进行图像采集和超声波检测。检测完当前下降区块后,控制无人机仍然按照航线继续进行图像采集和超声波检测,直至到达下一个下降区块。
S700:判断下降区块某个路段的摩阻检测数据和超声波数据是否均异常且摩阻检测数据异常的路段覆盖超声波数据异常的路段。
其中,当无人机完成对当前下降区块的图像采集和超声波检测后,对摩阻检测数据与超声波检测数据进行判断,将摩阻数据、超声波数据与预设的判断标准进行单独比对,当摩阻检测数据超过预设的判断标准则判断为摩阻检测数据异常,当超声波检测数据超过预设的判断标准则判断为超声波数据异常。
S800:将步骤S700中摩阻检测数据异常对应的道面沿航线向前后方向延伸并标记为异常道面段。
其中,将该路段延伸具体为根据预设的计算模型对前下降区块内的标记路段沿航线向前后延伸,将延伸后的标记路段标记为异常道面段。
结合图2,步骤S800具体包括:
S81:获得当前下降区块对应的历史摩阻检测数据。
其中,当前下降区块对应的历史摩阻检测数据根据数据库中的历史摩阻检测数据获得。
S82:得到当前下降区块内的摩阻检测数据异常点的分布信息。
其中,摩阻检测数据异常点的分布信息可根据步骤S81中的历史摩阻检测数据获得。
S83:获取摩阻数据异常点的疏密度信息。
其中,摩阻数据异常点的疏密度信息根据异常点的分布信息和预设的判断标准得出。举例来说,以当前标记路段为基准,沿航线向前后延伸A米,然后以A米为基准得到当前标记路段需要向前和向后延伸的长度。结合图4,以将当前标记路段向前延伸为例,计算A米范围内的摩阻数据异常点的个数X,预设A米内对应道面内的摩阻数据异常点的个数超过Y,则判断为该区域摩阻数据异常点密集;当检测到X<Y,则停止继续沿该方向延伸,将延伸A米对应的道面区域划分为密集区;当检测到X>Y,则沿延伸方向继续延伸a米,计算[a,A+a]这一区域内对应道面的摩阻数据异常点的个数X,若X>Y,则继续在之前延伸过一定长度的基础上继续按上述步骤延伸a米,直至检测到长度为A的区域内对应道面内摩阻数据异常点的个数X<Y为止,此时密集区的范围为A+a*N,其中N为延伸a米的次数。
S84:获取步骤S83中以标记路段为基准的摩阻数据异常点的密集区。
S85:将标记路段和密集区对应的道面标记为异常道面段。
S900:当无人机沿检测航线完成检测后,控制无人机对异常道面段进行复检。
结合图3,步骤S900具体包括:
S91:当无人机沿检测航线完成检测时,控制无人机按照原航线进行返回。
S92:在无人机返回途中,当无人机到达异常道面段,控制无人机下降,并控制无人机对当前异常道面段进行摩阻复检。
其中,摩阻复检为对当前异常道面段进行摩阻二次检测并得到摩阻复检数据。
S93:将摩阻复检数据覆盖当前异常道面段的摩阻检测数据。
S94:控制无人机在当前道面段的端点处喷射溶剂。
其中,喷射的溶剂可以是可溶性溶剂,溶剂在地面上形成的标记起到提示作用,在后期维护道面过程中为工作人员提供异常道面段的具体位置,在维护结束后工作人员可人工清洗溶剂形成的标记。
S95:控制无人机直线上升,继续按照检测航线返回。
S1000:得到检测结果并生成病害明细表。
其中,病害明细表生成的具体步骤为:
根据检测结果得到当前检测道面的摩阻检测数据异常点和超声波数据异常点,然后根据摩阻检测数据异常点得到相应的摩阻异常的道面病害区域,并且根据超声波数据异常点得到相应的超声波异常的道面病害区域,同时获取与每一道面病害区域对应的坐标点集;
根据坐标点集从影像数据中获取每一道面病害区域的具体图像;
将每一道面病害区域均配置对应的道面病害种类;其中,将摩阻检测数据异常对应的道面病害区域的病害种类配置为摩阻过低,将纹路深度数据异常对应的道面病害区域的病害种类配置为裂缝;
将每一道面病害区域对应的坐标点集、道面病害种类和道面病害区域的具体图像均进行整合,生成道面病害明细表。具体来说,道面病害明细表中,每一个坐标点集均对应一个道面病害种类和一个道面病害区域的具体图像。
实施原理:控制无人机按航线对机场道面进行检测,在每段子路线中获取一个下降区块,控制无人机在到达下降区块下降并对当前下降区块进行摩阻检测,检测结束后控制无人机回到当前下降区块对应的下降点对当前下降区块进行图像采集和超声波检测,并将图像数据、超声波数据和摩阻检测数据进行比对,判断该路段是否需要摩阻复检,并控制无人机按航线继续检测,检测完成后控制无人机按航线返回,并对需要摩阻复检的路段进行复检。
基于上述方法,本申请实施例还公开一种采用无人机监理道面特征的系统,参照图4,系统包括:规划模块1、划分模块2、检测模块3、裂缝检测模块31、第一标记模块32、摩阻检测模块33、上升模块34、判断模块35、计算模块36、第二标记模块37、整合数据模块4。
规划模块1,用于根据待检测道面为无人机设计检测航线,将检测航线划分为若干子路线。
划分模块2,用于将每一所述子路线对应的道面区域均沿延航线方向划分为若干区块。
检测模块3,用于控制无人机沿航线对机场道面进行检测,其中检测模块3包括裂缝检测模块31、第一标记模块32、摩阻检测模块33、上升模块34、判断模块35、计算模块36。
裂缝检测模块31,用于控制无人机沿检测航线飞行并进行图像采集和超声波检测,以得到影像数据和超声波数据,根据影像数据计算获取纹路深度数据。
第一标记模块32,用于在每段子路线对应的道面区域内均获取一个区块标记为下降区块。
摩阻检测模块33,用于用于控制无人机在当前下降区块下降,并对当前下降区块进行摩阻检测,以得到与当前下降区块对应的摩阻检测数据。
上升模块34,控制无人机上升到当前下降区块对应的下降点,继续按照航线对道面进行图像采集和超声波检测。
判断模块35,用于判断当前下降区块对应的超声波数据和摩阻检测数据是否异常。
计算模块36,用于当判断当前下降区块内的某个路段的摩阻数据和超声波数据均异常且摩阻数据异常的路段覆盖超声波数据异常的路段时,对当前下降区块的摩阻数据异常对应的路段进行标记。
第二标记模块37,用于根据预设的计算模型对当前下降区块内的标记路段沿航线向前后延伸,将延伸后的标记路段标记为异常道面段。
整合数据模块4,根据待检测道面所对应的影像数据、超声波数据、道面纹理深度数据、摩阻检测数据和异常道面段得到检测结果。
本申请实施例还公开一种智能终端,其包括存储器和处理器,存储器上存储有能够被处理器加载并执行如上述的采用无人机监理道面特征的方法的计算机程序。
本申请实施例还公开一种计算机可读存储介质,其存储有能够被处理器加载并执行如上述的采用无人机监理道面特征的方法的计算机程序,该计算机可读存储介质例如包括:U盘、移动硬盘、只读存储器(Read-Only Memory,ROM)、随机存取存储器(Random AccessMemory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上实施例仅用以说明本申请的技术方案,而非对申请的保护范围进行限制。显然,所描述的实施例仅仅是本申请部分实施例,而不是全部实施例。基于这些实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请所要保护的范围。
- 采用无人机监理道面特征的方法、系统、终端和存储介质
- 无人机建筑工程监理方法、系统、智能终端及存储介质