一种适用于ABS的高稳定EMB线控制动系统及其控制方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及汽车制动技术领域,尤其涉及一种适用于ABS(Antilock BrakeSystem,制动防抱死系统)的高稳定EMB(Electromechanical Brake System,电子机械制动系统)线控制动系统及其控制方法。
背景技术
制动系统是汽车的重要组成部分之一,这直接影响了汽车的形式安全性能。线控制动系统分为EHB(Electro Hydraulic Braking,电子液压制动系统)和EMB两类,EHB系统是电子系统与液压系统相结合所形成的多用途、多形式制动系统,电子系统提供柔性控制,液压系统作为备用系统提供动力;而EMB系统可以看作EHB系统的改进产品,主要由车轮制动模块、中央电子控制单元以及电子踏板模块组成,与传统液压制动系统相比,具有因执行器与制动踏板之间无液压和机械连接,大大减小制动器的作用时间,结构简单、质量更轻、安装更加方便、布局更加灵活,且在ABS模式下踏板无回弹振动、无噪声等优点。
当前电子机械线控制动系统EMB主要采用一个电机加一套机械结构,现有技术已公开的一种电子机械线控制动器,该系统中电机通过驱动螺杆螺母传动机构,通过螺杆螺母传动机构带动连接杆的运动,驱动活塞和制动钳体沿相反的方向移动,从制动盘两侧以相同的力将摩擦片压紧;虽然这种机构效率高,但缺点是不能精确控制制动力矩,而且一旦电机失效将失去制动功能,对驾驶员的人身安全造成重大威胁。另外汽车上装有的传统ABS防抱死制动系统,在制动时只是电机进行频繁的正反转,这极易造成电机过热发生损坏,降低电机寿命,造成资源浪费。
发明内容
针对现有技术中存在不足,本发明提供了一种适用于ABS的高稳定EMB线控制动系统及其控制方法,具有双电机冗余、制动过程更加平稳、制动响应迅速、增加电机使用寿命等特点。本发明是通过以下技术手段实现上述技术目的的。
一种适用于ABS的高稳定EMB线控制动系统的控制方法,包括三种制动模式:
模式①:第一电机和第二电机无故障,第一电机和第二电机共同工作,实现制动;
步骤1),若踏板制动开度λ=0,无制动,退出线控制动系统;若踏板制动开度λ>0,则进入步骤2);
步骤2),BCU检测是否有电机故障,若未发生故障,进入步骤3),若发生故障,则进入步骤11);
步骤3),BCU发送指令控制第一电机以及第二电机输出制动力矩T
步骤4),当滑移率S>S
步骤5),BCU发送指令控制第一电机停转,由于螺纹螺杆传动部件具有自锁的特点,第一电机(5)无需堵转力矩即可实现制动力矩的施加;BCU发送指令控制第二电机停转,并释放制动力矩T
步骤6),BCU发送指令控制第二电机停转,释放制动力矩T
步骤7),当S-S
步骤8),BCU发送指令控制第二电机正转,施加制动力矩T
步骤9),BCU发送指令保持第二电机当前制动力矩T
模式②:第一电机发生故障,第二电机工作,实现制动;
步骤10),返回步骤1);
步骤11),BCU检测第一电机是否发生故障,若发生故障,进入步骤12),若未发生故障,则进入步骤18);
步骤12),当S>S
步骤13),由于滚珠丝杠传动部件不具有自锁的特点,BCU发送指令控制第二电机停转,并释放制动力矩T
步骤14),BCU发送指令控制第二电机停转,释放制动力矩T
步骤15),当S-S
步骤16),BCU发送指令控制第二电机正转,施加制动力矩T
步骤17),BCU发送指令保持第二电机当前制动力矩T
模式③:第二电机发生故障,第一电机工作,实现制动;
步骤18),当S>S
步骤19),由于螺纹螺杆传动部件具有自锁的特点,电机停转施加的制动力矩不会释放,需电机反转施加制动力矩,BCU发送指令控制第一电机反转,释放制动力矩T
步骤20),BCU发送指令控制第一电机反转,释放制动力矩T
步骤21),当S-S
步骤22),BCU发送指令控制第一电机正转,施加制动力矩T
步骤23),BCU发送指令保持第二电机当前制动力矩T
进一步,所述制动力矩
进一步,所述制动力矩
更进一步,所述制动过程中的需求制动力矩
更进一步,所述需求制动强度采用模糊控制方法识别,具体为:制动踏板开度λ以及制动踏板开度变化率
进一步,所述滑移率
一种适用于ABS的高稳定EMB线控制动系统,包括电子控制单元和制动单元;
所述电子控制单元包括BCU、第一电机控制器和第二电机控制器,BCU与第一电机控制器和第二电机控制器信号连接;
所述制动单元包括第一电机、第二电机和传动结构,第一电机布置于制动器壳体外部,且第一电机的输出轴伸入制动器壳体内,第二电机布置于制动器壳体内部;所述传动结构包括螺纹螺杆传动部件和滚珠丝杠传动部件;所述螺纹螺杆传动部件包括螺纹螺杆和螺纹螺杆传动螺母,螺纹螺杆与第一电机输出轴固定连接,螺纹螺杆传动螺母套设在螺纹螺杆外部,且螺纹螺杆传动螺母端部与活动连接在制动器壳体内部的制动压块接触,制动压块还与第一摩擦片固定连接;所述滚珠丝杠传动部件包括中空的滚珠丝杆,滚珠丝杆不接触地套设在螺纹螺杆传动螺母外部,滚珠丝杆外侧与第二电机转子滚动配合,滚珠丝杆端部与制动压块接触;所述制动盘位于第一摩擦片与制动器壳体远离制动器后盖的一侧之间。
还包括蓄电池,用于向第一电机、第一电机控制器、第二电机、第二电机控制器以及制动控制单元BCU供电。
所述第二电机包括第二电机线圈绕组和第二电机转子,第二电机线圈绕组缠绕在第二电机转子上。
所述第一电机输出轴通过第二轴承支撑在制动器后盖上,所述第二电机转子通过第一轴承固定在制动器壳体内部。
本发明的有益效果为:
(1)本发明的线控制动系统为双电机冗余设计,正常情况下双电机进行工作,当检测出某一电机发生故障,另一电机开始工作进而正转或者反转,确保单个电机故障时,仍可提供足够的制动力矩,实现了本发明线控制动系统的可靠性;本发明在制动过程中,第一电机通过螺纹螺杆传动部件挤压制动盘,第二电机通过滚珠丝杠传动部件挤压制动盘,增加了受力点,避免制动过程中受力不均导致制动盘跳动,增强了制动过程中的稳定性;本发明中螺纹螺杆传动部件具有自锁的特点,滚珠丝杠传动部件不具有自锁的特点,在制动过程中,只需第一电机停转,调节第二电机停转或者正转,当触发防抱死控制系统,第一电机停转,通过螺纹螺杆传动部件锁止,第二电机停转、正转、停转,实现防抱死的目的,这个过程中避免了电机系统因频繁正反转导致发热烧毁的问题,提高了电机的使用寿命,保证制动的可靠性以及响应的速度。本发明适用于智能辅助驾驶以及自动驾驶的线控制动车辆,提高了制动系统的稳定性、可靠性以及响应速度,在保证制动安全的条件下,增加电机的使用寿命,进而降低成本。
(2)现有技术中,若两个电机都堵转,释放制动力矩时只需电机停转即可,但是制动时需实时保持制动力矩,长时间堵转对电机造成损害,减少寿命;若两个电机都不堵转,制动时无需实时保持制动力矩,但是释放制动力矩时需要反转,在触发防抱死时,频繁正反转会减少电机寿命;本发明的线控制动系统在制动时,一个电机不需堵转(螺纹螺杆传动部件具有自锁的特点),增加了电机的使用寿命,另一个电机需堵转(滚珠丝杠不具有自锁的特点),进行停转、正转、停转无频繁正反转,在保证制动要求的情况下,同样增加了电机的寿命。
附图说明
图1为本发明所述适用于ABS的高稳定EMB线控制动系统框图;
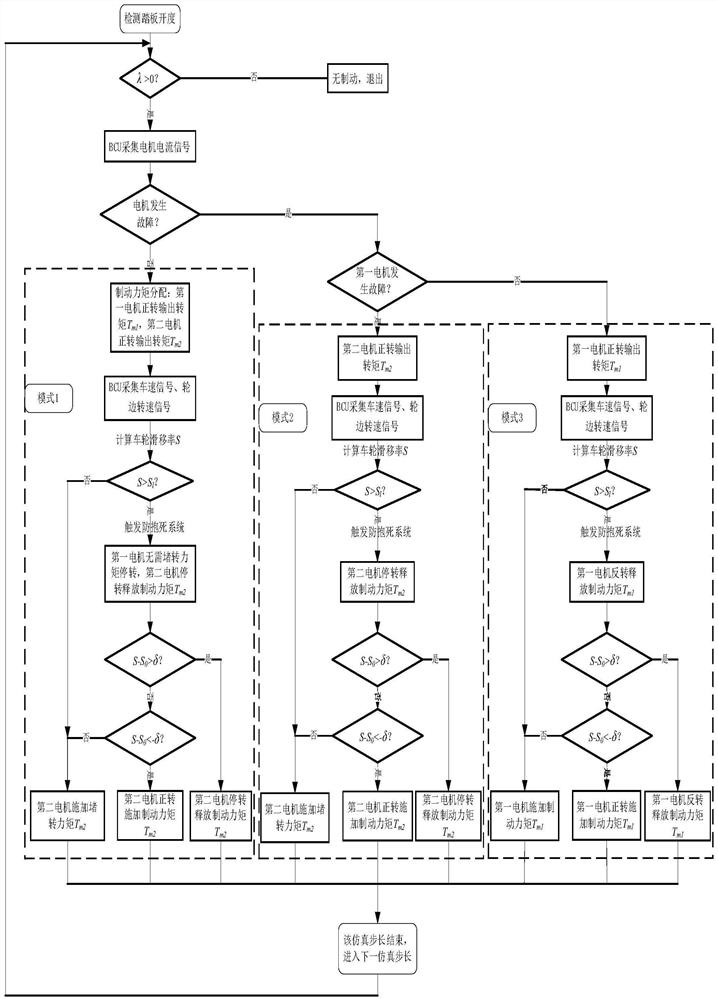
图2为本发明所述适用于ABS的高稳定EMB线控制动控制流程图;
图3(a)为本发明所述踏板开度的隶属度函数曲线图,图3(b)为本发明所述踏板开度变化率的隶属度函数曲线图,图3(c)为本发明所述制动强度的隶属度函数曲线图;
图中,1、制动控制单元BCU;2、蓄电池;3、第一电机控制器(MCU);4、第二电机控制器;5、第一电机;6、第二电机线圈绕组;7、第二电机转子;8、螺纹螺杆;9、螺纹螺杆传动螺母;10、第一轴承;11、滚珠丝杆;12、第二轴承;13、第一摩擦片;14、制动压块;15、制动盘;16、制动器壳体;17、制动器后盖。
具体实施方式
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
图1所示为一种适用于ABS的高稳定EMB线控制动系统,包括电子控制单元和制动单元。
电子控制单元包括BCU(制动控制单元)1、第一电机控制器3(MCU1)和第二电机控制器4(MCU2),BCU1与第一电机控制器3和第二电机控制器4信号连接;BCU1接收制动踏板信号(制动踏板开度λ)、车速信号v、轮速传感器发出的车轮转速信号w以及电机反馈的电流信号与电机工作状态信息,进行控制前的信息采集,进一步的通过计算得到制动信号、电机力矩输出信号和滑移率,BCU1将电机力矩输出信号发送给第一电机控制器3和第二电机控制器4,第一电机控制器3和第二电机控制器4控制第一电机5和第二电机输出相应的转矩,同时将第一电机5和第二电机当前的工作状态反馈给BCU1。
制动单元由蓄电池2、第一电机5、第二电机和传动结构组成;蓄电池2为整车储能元件,用于向第一电机5、第一电机控制器3、第二电机、第二电机控制器4以及制动控制单元BCU1供电;第一电机5布置于制动器壳体16外部,第一电机5的输出轴穿过制动器后盖17伸入制动器壳体16内部,且第一电机5输出轴通过第二轴承12支撑在制动器后盖17上;第二电机布置于制动器壳体16内部,第二电机由第二电机线圈绕组6和第二电机转子7组成,第二电机线圈绕组6缠绕在第二电机转子7上,第二电机转子7通过第一轴承10固定在制动器壳体16内部;传动结构包括螺纹螺杆传动部件和滚珠丝杠传动部件,螺纹螺杆传动部件包括螺纹螺杆8和螺纹螺杆传动螺母9,螺纹螺杆8与第一电机5输出轴固定连接,螺纹螺杆传动螺母9套设在螺纹螺杆8外部,螺纹螺杆传动螺母9与螺纹螺杆8相配合;螺纹螺杆传动螺母9端部与制动压块14接触,制动压块14活动连接在制动器壳体16内部,制动压块14一侧还与第一摩擦片13固定连接;滚珠丝杠传动部件包括中空的滚珠丝杆11,滚珠丝杆11套设在螺纹螺杆传动螺母9外部,且螺纹螺杆传动螺母9与滚珠丝杆11不接触,滚珠丝杆11外侧通过滚珠与第二电机转子7滚动配合,滚珠丝杆11端部与制动压块14接触;制动盘15位于第一摩擦片13与制动器壳体16远离制动器后盖17的一侧之间,制动盘15与车轮固定。
本发明中,第一电机5为大功率电机,第二电机为小功率电机。
一种适用于ABS的高稳定EMB线控制动系统的工作原理为:第一电机5的输出轴旋转带动螺纹螺杆8旋转,螺纹螺杆8旋转带动螺纹螺杆传动螺母9做平移运动,进而推动制动压块14和第一摩擦片13挤压制动盘15;第二电机转子7旋转带动滚珠丝杆11做平移运动,进而推动制动压块14和第一摩擦片13挤压制动盘15,达到制动的目的。
一种适用于ABS的高稳定EMB线控制动系统的控制方法,将制动过程分为三种模式,具体为:
模式①:第一电机5和第二电机无故障,第一电机5和第二电机共同工作,实现制动;
模式②:第一电机5发生故障,第二电机工作,实现制动;
模式③:第二电机发生故障,第一电机5工作,实现制动。
为了得出制动过程中的需求制动力矩,采用模糊控制方法识别制动强度z,具体为:
制动踏板开度λ以及制动踏板开度变化率
表1模糊控制规则表
制动踏板开度[0,100]对应于模糊子集[VS,S,M,L],制动踏板开度变化率[-100,100]对应于模糊子集[NL,NS,ZR,PS,PL],制动强度[0,1]对应于模糊子集[VS,S,M,L]。
制动过程中的需求制动力矩为:
双电机的需求制动力矩分配为平均分配:
其中:T
第一电机5的输出力矩与输出给制动盘15的轴向负载力F
T
其中:θ为螺纹螺杆8升角,r
作用在制动盘15上的摩擦力矩为:
T
其中:μ
由公式(1)-(3),可得
第二电机的输出力矩与输出给制动盘15的轴向负载力F
其中:I为滚珠丝杆11的导程,η
作用在制动盘15上的摩擦力矩为:
T
由公式(1)、(4)-(5),可得
BCU1根据当前车速信号v、轮边转速信号w,计算当前车轮滑移率
具体控制过程如下:
步骤(1),BCU1采集制动踏板处的位移传感器信号,若检测到踏板制动开度λ=0,说明无制动,退出线控制动系统;若检测到踏板制动开度λ>0,则进入步骤(2);
步骤(2),BCU1采集电机反馈的电流信号,检测是否有电机故障,若未发生故障进入步骤(3),若发生故障则进入步骤(11);
步骤(3),根据模糊控制计算得出第一电机5以及第二电机的需求制动力矩,BCU1发送指令控制第一电机5以及第二电机输出相应的制动力矩T
步骤(4),BCU1采集车速信号、轮速信号并计算车轮滑移率S,当S>S
步骤(5),BCU1发送指令控制第一电机5停转,由于螺纹螺杆传动部件具有自锁的特点,第一电机5无需堵转力矩即可实现制动力矩的施加;BCU1发送指令控制第二电机停转,释放制动力矩T
步骤(6),BCU1发送指令控制第二电机停转,释放制动力矩T
步骤(7),BCU1判断S-S
步骤(8),BCU1发送指令控制第二电机正转,施加制动力矩T
步骤(9),BCU1发送指令保持第二电机当前制动力矩;
步骤(10),重新返回步骤(1);
步骤(11),BCU1获取第一电机5的电流信号,检测第一电机5是否发生故障,若发生故障进入步骤(12),若未发生故障则进入步骤(18);
步骤(12),BCU1采集车速信号、轮速信号并计算车轮滑移率S,当S>S
步骤(13),由于滚珠丝杠传动部件不具有自锁的特点,BCU1发送指令控制第二电机停转,并释放制动力矩T
步骤(14),BCU1发送指令控制第二电机停转,释放制动力矩T
步骤(15),BCU1判断S-S
步骤(16),BCU1发送指令控制第二电机正转,施加制动力矩T
步骤(17),BCU1发送指令保持第二电机当前制动力矩;
步骤(18),BCU1采集车速信号、轮速信号并计算车轮滑移率S,当S>S
步骤(19),由于螺纹螺杆传动部件具有自锁的特点,电机停转施加的制动力矩不会释放,需电机反转施加制动力矩,BCU1发送指令控制第一电机5反转释放制动力矩T
步骤(20),BCU1发送指令控制第一电机5反转,释放制动力矩T
步骤(21),BCU1判断S-S
步骤(22),BCU1发送指令控制第一电机5正转,施加制动力矩T
步骤(23),BCU1发送指令保持第二电机当前制动力矩;
步骤(25),重新返回步骤(1)。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
- 一种适用于ABS的高稳定EMB线控制动系统及其控制方法
- 一种适用于ABS的高稳定EMB线控制动系统及其控制方法