车辆侧控制单元、机动车辆及用于运行车辆侧控制单元以时间同步制动的方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及第一车辆侧控制单元、第一机动车辆、用于运行第一车辆侧控制单元的方法、第二车辆侧控制单元、第二机动车辆和用于运行第二车辆侧控制单元的方法。
发明内容
本说明书的第一方面涉及用于机动车辆组中的第一机动车辆的第一车辆侧控制单元,其中所述第一车辆侧控制单元包括至少一个处理器、至少一个具有计算机程序代码的存储器、至少一个通信模块和至少一个天线,其中所述计算机程序代码被配置为其与所述至少一个处理器、所述至少一个通信模块和所述至少一个天线一起使得所述第一车辆侧控制单元确定用于时间同步地制动所述机动车辆组的至少一部分机动车辆的制动时刻,朝着第二机动车辆的第二控制单元的方向发送指示所述制动时刻的消息,选择所确定的制动时刻作为有效制动时刻,并且仅在达到所述有效制动时刻时才启动所述第一机动车辆的制动。
通过时间同步的制动有利地确保了将整个机动车辆组或其一部分转换到安全状态,即静止状态。在通信存在干扰的情况下或在有意对车辆组进行制动的情况下,不会接收到其他消息,并且在当前的有效制动时刻启动制动,由此纵队行驶的机动车辆自动执行紧急制动。因此防止随后车辆与第一机动车辆碰撞。虽然,到所述制动时刻出现为止的等待延长了实际的制动距离,但另一方面可能的是,通过时间同步地启动所述制动,特别是紧急制动,可以在纵队行驶期间进一步减小机动车辆之间的距离。这是可能的,因为在确定和保持与前方行驶车辆的距离时,很少需要或根本不需要考虑控制单元或驾驶员的反应时间。而是距离的减小引起了风影的增加,所述增加带来了随后机动车辆的燃料消耗的减少。因此,在延长制动距离与减小机动车辆之间的距离之间提供了有利的折衷,同时确保了紧急制动的可能性。
一个有利的实施方式的特征在于,所述第一车辆侧控制单元确定用于时间同步地制动所述机动车辆组的至少一部分机动车辆的其他制动时刻,其中所述其他制动时刻在将来比先前确定的制动时刻更远,朝着所述第二控制单元的方向发送指示所述其他制动时刻的其他消息,并选择所确定的其他制动时刻作为有效制动时刻。因此,所述有效制动时刻有利地移动到将来,并且不启动制动。通过重复这些步骤,所述第一控制单元总是向机动车辆组或控制单元组提供新的制动时刻,从而只要存在具有新制动时刻的消息就防止整个机动车辆组的制动。
一个有利的实施方式的特征在于,所述第一车辆侧控制单元确定用于引起制动的制动指示,并且根据所述制动指示的确定不再发送指示其他制动时刻的消息。通过不再发送具有相应制动时刻的其他消息,不再延长所述有效制动时刻,并且在达到所述有效制动时刻时对所述机动车辆组执行同步制动。
本说明书的另一方面涉及第一机动车辆,其具有根据前述方面之一的第一车辆侧控制单元以及具有第一制动设施,其中所述第一车辆侧控制单元借助于所述第一制动设施来制动所述第一机动车辆。
本说明书的另一方面涉及一种用于运行用于无线电通信网络和用于机动车辆组中的第一机动车辆的第一车辆侧控制单元的方法,其中所述方法包括:确定用于时间同步地制动所述机动车辆组的至少一部分机动车辆的制动时刻,朝着第二控制单元的方向发送指示所述制动时刻的消息,选择所确定的制动时刻作为有效制动时刻,并且仅在达到所述有效制动时刻时才启动所述第一机动车辆的制动。
本说明书的另一方面涉及一种用于第二机动车辆的第二车辆侧控制单元,其中所述第二车辆侧控制单元包括至少一个处理器、至少一个具有计算机程序代码的存储器、至少一个通信模块以及至少一个天线,其中所述计算机程序代码被配置为其与所述至少一个处理器、所述至少一个通信模块和所述至少一根天线一起使得所述第二车辆侧控制单元接收从第一车辆侧控制单元发出的指示用于时间同步地制动所述机动车辆组的至少一部分机动车辆的制动时刻的消息,选择所接收的制动时刻作为有效制动时刻,并且仅在达到所述有效制动时刻时才启动所述第二机动车辆的制动。
通过时间同步的制动有利地确保了将整个机动车辆组或其一部分转换到安全状态,即静止状态。在通信存在干扰的情况下或在有意对车辆组进行制动的情况下,不会接收到其他消息,并且在当前的有效制动时刻启动制动,由此纵队行驶的机动车辆自动执行紧急制动。因此防止随后车辆与第一机动车辆碰撞。虽然,到所述制动时刻出现为止的等待延长了实际的制动距离,但另一方面可能的是,通过时间同步地启动制动,特别是紧急制动,可以在纵队行驶期间进一步减小机动车辆之间的距离。这是可能的,因为在确定和保持与前方行驶车辆的距离时,很少需要或根本不需要考虑控制单元或驾驶员的反应时间。而是距离的减小引起了风影的增加,所述增加带来了随后机动车辆的燃料消耗的减少。因此,在延长制动距离与减小机动车辆之间的距离之间提供了有利的折衷,同时确保了紧急制动的可能性。
一个有利的实施方式的特征在于,所述第二车辆侧控制单元接收从所述第一控制单元发出的指示时间同步地制动所述机动车辆组的至少一部分机动车辆的其他制动时刻的其他消息,其中所述其他制动时刻在将来比先前接收的制动时刻更远,并且选择所接收的其他制动时刻作为有效制动时刻。因此,所述有效制动时刻有利地移动到将来,并且不启动制动。通过重复这些步骤,所述第一控制单元总是向所述机动车辆组或控制单元组提供新的制动时刻,从而只要存在具有新制动时刻的消息就防止整个机动车辆组的制动。
一个有利的实施方式的特征在于,所述第二车辆侧控制单元朝着第三车辆侧控制单元的方向发送指示接收到的制动时刻的另一消息。有利地,通过发送包括所述制动时刻的所述另一消息,实现了逐跳方法,在该逐跳方法中每个控制单元都知道其在队列/纵队中的位置,并且从前方行驶的第一机动车辆开始,将从直接在前的机动车辆接收的每个制动时刻发送到直接随后的机动车辆。每个随后的机动车辆或其控制设备也可以不再转发接收到的制动时刻,以便由此实现后方行驶的机动车辆的制动。
本说明书的另一方面涉及一种第二机动车辆,其具有根据前述方面之一的第二车辆侧控制单元并且具有第二制动设施,其中所述第二车辆侧控制单元借助于所述第二制动设施来制动所述第二机动车辆。
本说明书的另一方面涉及一种用于运行用于无线电通信网络和用于机动车辆组中的第二机动车辆的第二车辆侧控制单元的方法,其中所述方法包括:接收从第一车辆侧控制单元发出的指示用于时间同步地制动所述机动车辆组的至少一部分机动车辆的制动时刻的消息,选择所接收的制动时刻作为有效制动时刻,并且仅在达到所述有效制动时刻时才启动所述第二机动车辆的制动。
附图说明
可以从下面的描述和附图中获得其他特征和优点。在附图中:
图1以示意性透视图示出了交通状况;
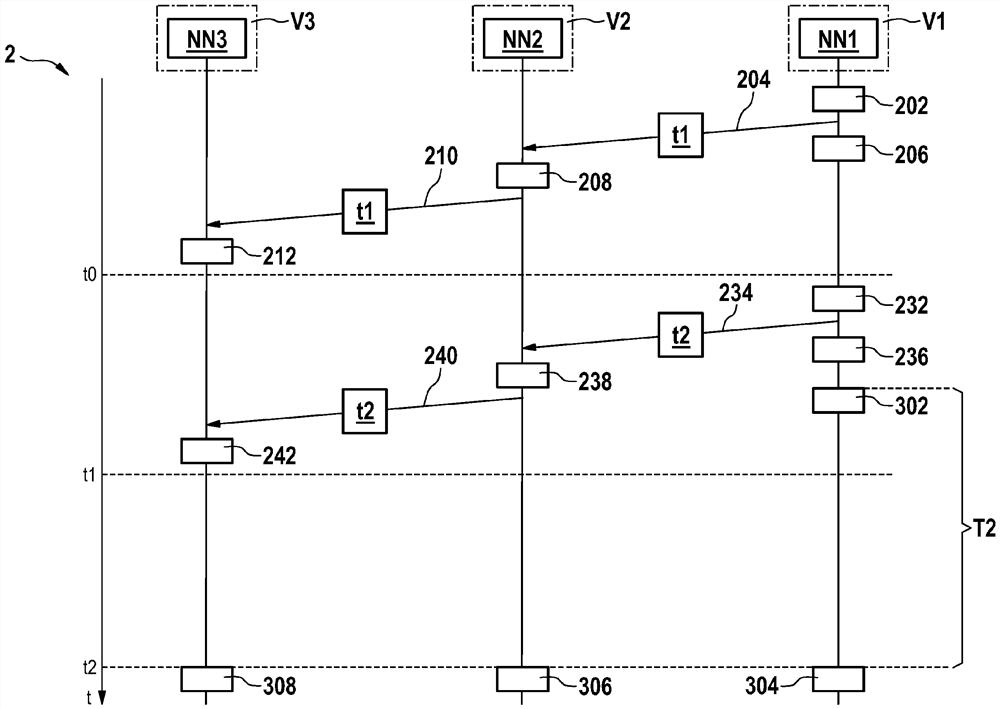
图2至图4分别示出了用于运行无线电通信网络的示意性序列图。
具体实施方式
图1示出了示例性交通状况的示意性透视图。每个机动车辆V1,V2,V3包括车辆侧控制单元NN1,NN2,NN3,这些车辆侧控制单元一起形成无线电通信网络2。相应的机动车辆V1,V2,V3特别是卡车或卡车拖车或铰接式卡车。
每个控制单元NN1,NN2,NN3都包括数据总线B1,B2,B3,该数据总线将至少一个处理器P1,P2,P3、存储器M1,M2,M3和无线电模块C1,C2,C3彼此连接。至少一个天线A1,A2,A3连接到无线电模块C1,C2,C3。相应的无线电模块C1,C2,C3被配置为根据自组织无线电通信网络2经由天线A1,A2,A3发送和接收无线电信号。在存储器M1,M2,M3上存储了计算机程序产品意义上的计算机程序。该计算机程序被构造用于特别是借助于至少一个处理器P1,P2,P3、至少一个存储器M1,M2,M3和至少一个无线电模块C1,C2,C3来执行在本说明书中阐述的方法步骤,并且经由至少一个天线A1,A2,A3与其他控制单元通信。替代地或附加地,处理器P1,P2,P3被实现为ASIC,以执行所描述的方法步骤。相应的控制单元NN1,NN2,NN3包括时间模块G1,G2,G3,借助于该时间模块,相应的控制单元NN1,NN2,NN3将其内部时钟同步到全球时间。时间模块G1,G2,G3例如是GPS模块(GPS:全球定位系统)。与全球时间同步的内部时钟用于协调车辆侧控制单元NN1至NN3的动作。相应的机动车辆V1,V2,V3包括制动设施BR1,BR2,BR3。相应的控制单元NN1,NN2,NN3借助于信号S1,S2,S3启动机动车辆V1,V2,V3的制动,特别是紧急制动,其中将信号S1,S2,S3传送到相应的制动设施BR1,BR2,BR3。
在实施例中,相应的控制单元NN1,NN2,NN3由多个个体组件——例如无线电通信网络终端和控制设备——组成,所述个体组件又包括至少一个处理器、存储器、数据总线和至少一个通信接口。所述终端接收并发送例如控制消息,其中在所述控制消息中包含的信息由至少一个控制设备处理,其中所述至少一个控制设备确定信号S1。
无线电通信网络2例如提供无线电资源或无线电运行资源意义上的至少一个自组织无线电信道。每个控制单元NN1,NN2,NN3例如根据IEEE 802.11p标准,特别是2010年7月15日的IEEE 802.11p-2010配置,该标准通过引用结合到本说明书中。IEEE 802.11p PHY功能和MAC功能为美国的专用短程通信DSRC和欧洲的合作ITS、C-ITS的上层协议提供服务。控制单元NN1,NN2,NN3经由非许可频率范围内的自组织无线电信道直接相互通信。通过无线电模块C1,C2,C3借助于CSMA/CA协议(载波侦听多路访问/冲突避免)访问所述自组织无线电信道。所述自组织无线电信道和无线电通信网络2例如由IEEE标准“802.11 p-2010 -IEEE Standard for Information Technology - Local and Metropolitan AreaNetworks-Specific Part 11 : Wireless LAN Medium Access Control (MAC) andPhysical Layer (PHY) Specifications Amendment 6: Wireless Access in VehicularEnvironments”规范,通过引用并入该标准。IEEE 802.11p是用于扩展WLAN标准IEEE802.11的标准。IEEE 802.11p的目标是建立乘用车中的无线电技术并且为智能交通系统(ITS)应用提供可靠的接口。IEEE 802.11p也是5.85至5.925GHz范围内的专用短程通信(DSRC)的基础。替代地,车辆侧控制单元NN1,NN2,NN3形成根据LTE-V标准或其他标准的通信网络。为了访问所述自组织无线电信道,控制单元NN1,NN2和NN3例如应用了先听后讲(Listen-Before-Talk)的方法。LBT包括退避程序,该程序在发送之前检查检查所述自组织无线电信道的占用情况。
通过引用并入本文的文献“ETSI EN 302 663 V1.2.0(2012-11)”描述了ITS-G5技术的两个最低层(ITS G5:在5GHz频带中工作的智能传输系统),即物理层和数据安全层。为了使用所述自组织无线电信道,无线电模块C1,C2,C3例如根据“ETSI TS 102 687 V1.1.1(2011-07)”实现这两个最低层以及对应的功能。为了使用作为非许可频带NLFB的一部分的所述自组织无线电信道,欧洲有以下非许可频带可用:1)用于5.875GHz至5.905GHz频率范围内与安全相关的应用的ITS-G5A;2)用于5.855GHz至5.875GHz频率范围内与安全无关的应用的ITS-G5B;3)用于在5.055GHz至5.925GHz频率范围内运行ITS应用的ITS-G5D。ITS-G5使得可以在基站上下文之外的控制单元NN1,NN2,NN3之间进行通信。ITS-G5标准使得可以立即交换数据帧,并避免了在建立基于小区的网络时所需要的耗费。
通过引用并入本文的文献“ETSI TS 102 687 V1.1.1(2011-07)” 针对ITS-G5描述了“分散式拥塞控制机制”。除其他之外,所述自组织无线电信道用于交换交通安全数据和交通效率数据。无线电模块C1,C2,C3实现例如在文献“ETSI TS 102 687 V1.1.1(2011-07)”中描述的功能。ITS-G5的应用和服务基于形成无线电通信网络2的控制单元NN1,NN2,NN3的协作行为。无线电通信网络2实现了在道路交通中对时间要求严格的应用,这些应用要求快速交换信息,以便及时警告和支持驾驶员和/或车辆。为了保证无线电通信网络2的平稳运行,将“分散拥塞控制”(DCC)用于ITS-G5的所述自组织无线电信道。DCC具有位于ITS体系架构的多个层上的功能。DCC机制基于关于所述无线电信道的知识。通过信道探测获得信道状态信息。
在所示的交通状况下,车辆V1在车辆V2的前方行驶,并且车辆V2在车辆V3的前方行驶。车辆V1到V3形成纵队,即所谓的队列(Platoon)。机动车辆V2和V3自动适配于其与前方行驶的机动车辆V1和V2的相应距离,以便能够执行紧急制动而不会碰撞前方行驶的机动车辆。
在所示的示例中,相应的经过签名的控制消息N1,N2,N3从控制单元NN1,NN2,NN3发送到直接随后的机动车辆的控制单元NN2,NN3,其中控制单元NN2,NN3基于所包含的签名检查所述控制消息的起源。在一种扩展中,例如利用组密钥对控制消息N1,N2,N3进行加密,使得该组中的机动车辆可以访问控制消息N1,N2,N3。
图2示出了用于运行无线电通信网络2的示意性序列图。在步骤202中,第一车辆侧控制单元NN1确定制动时刻t1,该制动时刻在步骤204中被传送至控制单元NN2。在步骤206中,控制单元NN1选择所确定的制动时刻t1作为有效制动时刻。
在步骤208中,控制单元NN2选择所接收的制动时刻t1作为有效制动时刻。在步骤210中,所接收的制动时刻t1被传送到控制单元NN3。在步骤212中,控制单元NN3选择所接收的制动时刻t1作为有效制动时刻。
在出现有效制动时刻t1之前,不通过任何控制单元NN1-NN3执行紧急制动意义上的制动。因此,先前确定或接收的制动时刻t0失去了其在出现制动时刻t0时启动紧急制动意义上的制动的有效性。
为了继续不启动紧急制动,需要用其他制动时刻t2来代替有效制动时刻t1,该制动时刻t2在将来比制动时刻t1还远。因此,还在制动时刻t1出现之前,该其他制动时刻t2就必须在无线电通信网络2中分发给控制单元NN1至NN3。为此,引导队列的控制单元NN1在步骤232中确定其他制动时刻t3,并且在步骤234中将其他制动时刻t3传送到控制单元NN2。在步骤236中,第一控制单元NN1选择所确定的制动时刻t2作为有效制动时刻,由此将制动时刻t1替换为制动时刻t2作为有效制动时刻。在步骤238中,第二控制单元NN2选择所接收的其他制动时刻t2作为有效制动时刻。在步骤240中,第二控制单元NN2将所接收的其他制动时刻t2传送给第三控制单元NN3,第三控制单元NN3在步骤242中选择所接收的制动时刻t2作为有效制动时刻。
针对其他制动时刻t3,得到类似于步骤232-242的步骤252-262。
机动车辆NN2,NN3仅根据源自直接在前行驶的机动车辆NN1,NN2的消息来分别更新其有效制动时刻。由此确保在通信丢失或通信存在干扰的情况下,可以分别在有效制动时刻以同步的方式使机动车辆NN2,NN3后方的所有车辆停止。
在另一示例中,所确定的制动时刻由第一控制单元NN1以重复的消息发送给第二控制单元NN2,第二控制单元NN2又将所确定的制动时刻以重复的消息发送给第三控制单元NN3。由此可以补偿分组丢失,并且可以防止不必要的紧急制动。
在这种方法中可能减小的队列中机动车辆之间的距离必须在转换到用于启动紧急制动的另一方法时增加,此后才使用所述另一方法。此外,设置机制来确保整个队列使用相同的紧急制动方法。
制动时刻t1,t2,t3例如在消息内容中明确地——例如以时间戳的形式——传达。在另一示例中,相应的消息包括唯一地引用相应的制动时刻t1,t2,t3的标识符。
图3示出了用于运行无线电通信网络2的示意性序列图。与图2不同,第一控制单元NN1在步骤302中确定用于引起紧急制动的制动指示。该制动指示例如根据第一机动车辆V1前方的行车道上的障碍物识别来加以确定。第一控制单元NN1根据所述制动指示防止发送其他制动时刻。在一个示例中,立即禁止发送其他消息。在另一示例中,继续传送消息,但是这些消息不具有新的制动时刻,而是具有关于即将进行紧急制动的提示。然后,随后的机动车辆可以准备在有效制动时刻制动,并且例如将用于使卡车司机固定在座位上的安全带拉紧器拉紧,以减少在紧急制动时受伤的风险。
因此,在出现制动时刻t2时最后在队列中分发的制动时刻t2生效并且网络单元NN1,NN2,NN3中的相应网络单元在相应的步骤304、306、308中启动相应机动车辆V1,V2,V3的制动。因此,在时刻t2对所有参与队列的机动车辆V1,V2,V3同步制动。为了使之成为可能,第一控制单元NN1必须在步骤302中识别出必要的紧急制动与在步骤304中实际启动所述紧急制动之间等待持续时间T2。
图4示出了用于运行无线电通信网络2的示意性序列图。与图2不同,在步骤234中传输其他制动时刻t2时通信受到干扰,由此控制单元NN2和NN3没有获得其他制动时刻t2。因此,相应的控制单元NN2,NN3在步骤402、404中启动制动,特别是紧急制动。相反,第一机动车辆V1继续行驶,由此导致由机动车辆V1至V3组成的队列分离。
- 车辆侧控制单元、机动车辆及用于运行车辆侧控制单元以时间同步制动的方法
- 第一车辆侧控制单元和用于运行第一车辆侧控制单元的方法