汽车安全系统
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及汽车安全领域,确切地说是汽车安全系统。
背景技术
汽车安全对于车辆来说分为主动安全和被动安全两大方面。主动安全就是尽量自如的操纵控制汽车。无论是直线上的制动与加速还是左右打方向都应该尽量平稳,不至于偏离既定的行进路线,而且不影响司机的视野与舒适性。这样的汽车,当然就有着比较高的避免事故能力,犹其在突发情况的条件下保证汽车安全。被动安全是指汽车在发生事故以后对车内乘员的保护,如今这一保护的概念以及延伸到车内外所有的人甚至物体。由于国际汽车界对于被动安全已经有着非常详细的测试细节的规定,所以在某种程度上,被动安全是可以量化的。
自动驾驶汽车又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。在20世纪已有数十年的历史,21世纪初呈现出接近实用化的趋势。自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
目前市场车辆运营时,往往会遇到一些突发情况,如有人冲入驾驶位置抢夺方向盘、和司机吵架甚至在车辆行驶过程中殴打驾驶员或者驾驶员因身体突发疾病等造成车辆失去控制,进而造成一定的安全事故。
发明内容
本发明要解决的技术问题是目前市场车辆运营时,往往会遇到一些突发情况,如有人冲入驾驶位置抢夺方向盘、和司机吵架甚至在车辆行驶过程中殴打驾驶员或者驾驶员因身体突发疾病等造成车辆失去控制,进而造成一定的安全事故。
为解决上述技术问题,本发明采用如下技术手段:
汽车安全系统,包括车辆本体,车辆本体设有数据采集装置、数据分析装置、数据传输装置和方向控制系统;其特征在于:所述的所述的数据采集装置包括视频采集装置、音频采集装置、雷达检测系统,所述的数据分析装置为车载控制器和远程控制中心,所述的数据传输装置为无线传输器,所述的方向控制系统包括固定座、电力装置、限位装置和转向装置,所述的电力装置为移动电机和涡轮电机,所述的转向装置为方向盘、转向轴和离合盘,所述的限位装置包括限位开关和限位块,所述的视频采集装置、音频采集装置、雷达检测系统通过数据线、无线传输器连接车载控制器信号输入端,车载控制器信号输出端通过数据线、无线传输器连接方向控制系统,车载控制器通过无线传输器连接远程控制中心,固定座设置在方向控制系统中部,电力装置通过固定螺丝连接在固定座上,下限位块、上限位块固定连接在固定座上,下位限位开关设置在下限位块上方;上位限位开关安装在上限位块上方。
作为优选,本发明更进一步的技术方案是:
所述的视频采集装置为车内舱前端高清摄像头、车内舱后端高清摄像头和乘客上下门区域高清摄像头,音频采集装置为驾驶位区域音频视频监控摄像头,所述的雷达检测系统左位车载毫米波雷达智能盲点监测、右位车载毫米波雷达智能盲点监测和后位车载毫米波雷达智能盲点监测。
所述的车载控制器为行车记录、录像和执行辅助命令,所述的远程控制中心将车辆本体外部数据和驾驶室内部数据综合分析。
所述的固定座设置车辆本体内,固定座上设有电机支架,电机支架连接电机固定座,涡轮电机均设置在电机支架上,齿条固定在固定座上,移动电机用过电机固定座固定在上支撑座上方,移动电机轴端装有啮合的齿轮和齿条。
所述的转向装置下转向轴连接车轮转向横拉杆,下转向轴上端安装有下离合盘,方向盘安装在上转向轴上端,上转向轴的下端连接上离合盘,上支撑座通过转向轴承连接上转向轴,上转向轴通过连接直线导轨固定在固定座上方,蜗轮蜗杆安装在下转向轴上,蜗轮蜗杆左端通过辅助轴承固定在支撑块上,支撑块安装固定在固定座上,蜗轮蜗杆啮合连接,蜗轮蜗杆右端与蜗轮电机连接。
汽车安全系统工作流程:
流程1:数据获取:车辆在正常行驶过程中,车辆上的各摄像头正常工作,录像,并通过车载控制器利用无线网络连接远程控制中心进行影像音频备份;
流程2:远程分析:远程控制中心设有内置程序,可根据传输过来的视频、音频备份外,通过设定的动态分析程序分析传输画面的人物,动态分析采用人的轮廓外形捕捉和脸部识别数据分析的分析程序;并事先记录驾驶员的正常驾驶姿态,音频中对驾驶员语速、音量的分析,程序编写时,事先记录驾驶员的正常语速、音量等声音特点;
流程3:驾驶室内数据获取和分析:通过分析驾驶位区域音频视频监控摄像头视频画面和乘客上下门区域高清摄像头的视频画面辅助分析;
流程4:自动驾驶:远程控制中心通过车载控制器将车辆切换到自动驾驶模式;
流程5:车辆靠边停车:当车辆靠边停车后,驾驶人员问题妥善解决后,由远程控制中心控制移动电机运转,使上支撑座向下运动,移动电机向下运动过程中,触碰下位限位开关停止运转,此时带动上离合盘向下运动与下离合盘重新接触,由驾驶员正常驾驶车辆进入道路正常行驶。
所述的驾驶室内数据获取和分析情况为三种:
第一种情况:当驾驶区域内,只有驾驶员一人,且没有说话,驾驶姿态正常;此时车辆正常行驶;各摄像头均继续执行视频监控智能,远程控制中心执行备守任务,实时分析传输画面并备份,车辆正常行驶;
第二种情况:当驾驶区域内,除驾驶员一人外有其他人员出现时,通过驾驶位区域音频视频监控摄像头执行动态捕捉驾驶员面部表情,辅助分析乘客上下门区域高清摄像头影像,并附加分析驾驶位区域音频视频监控摄像头的拾取音频与记录的驾驶员音频对比分析;驾驶员语速、音量正常,面部表情正常,驾驶坐姿无偏差,车辆正常行驶;
驾驶员语速、音量、面部表情异常,情绪比较激动,驾驶坐姿难以保证无偏差;或者出现的第二人员动作判断较大,有抢夺方向盘嫌疑;远程控制中心控制车辆切换到自动驾驶模式,自动打开车辆双闪灯,同时使方向盘与车辆转向分离,由远程控制中心通过车载设备辅助,控制车辆安全的靠边停车;
第三种情况:当驾驶区域内,只有驾驶员一人时,通过驾驶位区域音频视频监控摄像头动态捕捉发现驾驶员坐姿异常,无法捕捉面部表情或表情痛苦,远程控制中心系统利用车载控制器远程呼叫,司机无应答;远程控制中心控制车辆切换到自动驾驶模式,自动打开车辆双闪灯,方向盘与车辆转向分离,由远程控制中心通过车载设备辅助,控制车辆安全的靠边停车;
出现第二种情况或第三种情况时,远程控制中心同时发出预警,使中心值守人员密切关注该车辆行驶,直至确认无潜在危险方可由远程控制中心自主分析监控;在车辆自动驾驶时,中心值守人员同时远程利用车内语音系统安抚乘客。
所述的第二种情况或第三种情况中切换到自动驾驶模式,远程控制中心控制移动电机工作,使移动电机用过齿轮在齿条作用下,带动上支撑座通过直线导轨向上移动;当上升上支撑座碰到上位限为开关停止,同时信号传递给车载控制器;上支撑座上升,带动上转向轴向上移动,使上离合盘与下离合盘脱离接触;此时方向盘任意转动,无法将方向传递到下方车轮;
在远程控制中心控制方向盘上升使上离合盘与下离合盘脱离接触的同时,车载控制器使蜗轮电机开始工作,首先保障车辆向正前方行驶方向不变;以右位车载毫米波雷达智能盲点监测为主;左位车载毫米波雷达智能盲点监测、后位车载毫米波雷达智能盲点监测为辅,对车辆的左、右、后方向进行判断;通过雷达感知右后方来车距离;通过盲点监测和摄像头观察周围环境;使蜗轮电机工作,通过蜗轮蜗杆带动下转向轴转动,带动车辆车轮转向,在多位车载毫米波雷达智能盲点监测测辅助下,使车辆向道路右侧路边安全平稳的靠边停车;
在车辆靠右路边停车过程中,当右位车载毫米波雷达智能盲点监测感知右侧来车较近时,车辆自动避让右侧来车,控制蜗轮电机使车辆返回本车道;
在车辆靠右路边停车过程中,当右位车载毫米波雷达智能盲点监测感知右侧来车较远时,且速度不快,车载控制中心控制蜗轮电机使车辆向右变道,直至到道路最右侧;
车辆在进入自动驾驶模式时,远程控制中心同时发出预警,使中心值守人员密切关注该车辆行驶,直至确认车辆靠边停车。
本方案采用驾驶位高清摄像头加音频采集进行传输到远程控制中心,进而对采集的画面和音频进行后台分析,判断当前情况;
本方案采用伺服电机在齿轮齿条作用下,带动转向轴离合器分离,使车辆在自动驾驶状态下,通过蜗轮蜗杆控制前进方向,通过车载雷达进行障碍判断,使车辆平稳靠边停车。
本发明方案通过多个摄像头采集信息,结合雷达信息收集,综合判断驾驶室内的情况,设置应急反应和机动反应,提高车辆自动驾驶安全性能,提高自动驾驶人工智能效果,使车辆行驶过程中更加安全可靠。
附图说明
图1为本发明的方向盘结构示意图。
图2为本发明的方向盘另一结构示意图。
图3为本发明摄像头布局示意图。
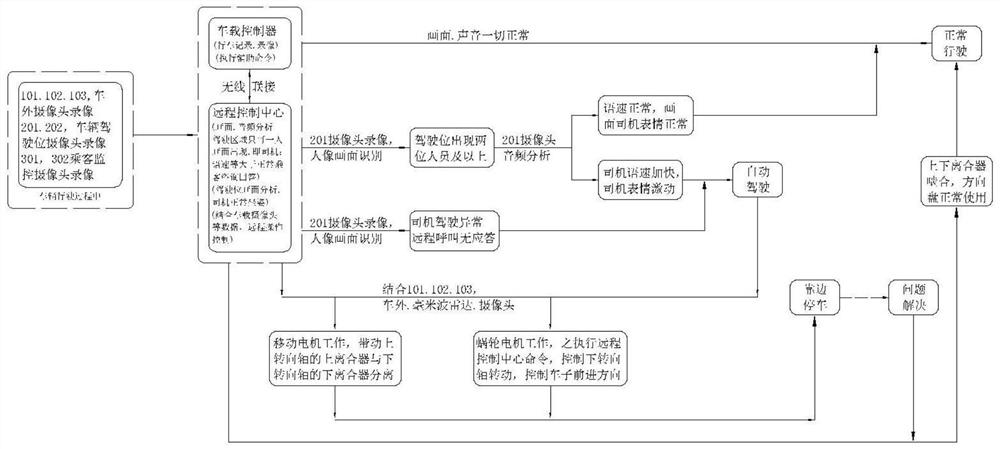
图4为本发明工作流程示意图。
附图标记说明:
1下转向轴;2蜗轮蜗杆;3辅助轴承;4支撑块;5转向轴承;6下支撑座;7下限位块;8下位限位开关;9齿轮;10移动电机;11齿条;12上限位块;13上位限位开关;14上转向轴;15方向盘;16直线导轨;17上支撑座;18电机固定座;19上离合盘;20下离合盘;21固定座;22电机支架;23蜗轮电机;
101左位车载毫米波雷达智能盲点监测;102右位车载毫米波雷达智能盲点监测;103后位车载毫米波雷达智能盲点监测;
201驾驶位区域音频视频监控摄像头;202乘客上下门区域高清摄像头;
301车内舱前端高清摄像头;302车内舱后端高清摄像头。
具体实施方式
下面结合实施例,进一步说明本发明。
具体实施例1:
参见图1、图2、图3可知,本发明汽车安全系统,包括车辆本体,车辆本体设有数据采集装置、数据分析装置、数据传输装置和方向控制系统;所述的所述的数据采集装置包括视频采集装置、音频采集装置、雷达检测系统,所述的数据分析装置为车载控制器和远程控制中心,所述的方向控制系统包括21固定座、电力装置、限位装置和转向装置,所述的电力装置为10移动电机和涡轮电机,所述的转向装置为15方向盘、转向轴和离合盘,所述的限位装置包括限位开关和限位块,视频采集装置为301车内舱前端高清摄像头、302车内舱后端高清摄像头和202乘客上下门区域高清摄像头,音频采集装置为201驾驶位区域音频视频监控摄像头,所述的雷达检测系统101左位车载毫米波雷达智能盲点监测、102右位车载毫米波雷达智能盲点监测和103后位车载毫米波雷达智能盲点监测,车载控制器为行车记录、录像和执行辅助命令,所述的远程控制中心将车辆本体外部数据和驾驶室内部数据综合分析,数据传输装置为无线传输器,21固定座设置车辆本体内,21固定座上设有22电机支架,22电机支架连接18电机固定座,涡轮电机均设置在22电机支架上,11齿条固定在21固定座上,10移动电机用过18电机固定座固定在17上支撑座上方,10移动电机轴端装有啮合的9齿轮和11齿条,8下位限位开关设置在7下限位块上方;13上位限位开关安装在12上限位块上方,7下限位块、12上限位块固定连接在21固定座上。转向装置1下转向轴连接车轮转向横拉杆,1下转向轴上端安装有20下离合盘,15方向盘安装在14上转向轴上端,14上转向轴的下端连接19上离合盘,17上支撑座通过5转向轴承连接14上转向轴,14上转向轴通过连接16直线导轨固定在21固定座上方,2蜗轮蜗杆安装在1下转向轴上,2蜗轮蜗杆左端通过3辅助轴承固定在4支撑块上,4支撑块安装固定在21固定座上,2蜗轮蜗杆啮合连接,2蜗轮蜗杆右端与23蜗轮电机连接。
具体实施例2:
参见图4可知,本发明汽车安全系统工作流程:
流程1:数据获取:车辆在正常行驶过程中,车辆上的各摄像头正常工作,录像,并通过车载控制器利用无线网络连接远程控制中心进行影像音频备份;
流程2:远程分析:远程控制中心设有内置程序,可根据传输过来的视频、音频备份外,通过设定的动态分析程序分析传输画面的人物,动态分析采用人的轮廓外形捕捉和脸部识别数据分析的分析程序;并事先记录驾驶员的正常驾驶姿态,音频中对驾驶员语速、音量的分析,程序编写时,事先记录驾驶员的正常语速、音量等声音特点;
流程3:驾驶室内数据获取和分析:通过分析201驾驶位区域音频视频监控摄像头视频画面和202乘客上下门区域高清摄像头的视频画面辅助分析;
所述的驾驶室内数据获取和分析情况为三种:
第一种情况:当驾驶区域内,只有驾驶员一人,且没有说话,驾驶姿态正常;此时车辆正常行驶;各摄像头均继续执行视频监控智能,远程控制中心执行备守任务,实时分析传输画面并备份,车辆正常行驶;
第二种情况:当驾驶区域内,除驾驶员一人外有其他人员出现时,通过201驾驶位区域音频视频监控摄像头执行动态捕捉驾驶员面部表情,辅助分析202乘客上下门区域高清摄像头影像,并附加分析201驾驶位区域音频视频监控摄像头的拾取音频与记录的驾驶员音频对比分析;驾驶员语速、音量正常,面部表情正常,驾驶坐姿无偏差,车辆正常行驶;
驾驶员语速、音量、面部表情异常,情绪比较激动,驾驶坐姿难以保证无偏差;或者出现的第二人员动作判断较大,有抢夺15方向盘嫌疑;远程控制中心控制车辆切换到自动驾驶模式,自动打开车辆双闪灯,同时使15方向盘与车辆转向分离,由远程控制中心通过车载设备辅助,控制车辆安全的靠边停车;
第三种情况:当驾驶区域内,只有驾驶员一人时,通过201驾驶位区域音频视频监控摄像头动态捕捉发现驾驶员坐姿异常,无法捕捉面部表情或表情痛苦,远程控制中心系统利用车载控制器远程呼叫,司机无应答;远程控制中心控制车辆切换到自动驾驶模式,自动打开车辆双闪灯,同时使15方向盘与车辆转向分离,由远程控制中心通过车载设备辅助,控制车辆安全的靠边停车;
出现第二种情况或第三种情况时,远程控制中心同时发出预警,使中心值守人员密切关注该车辆行驶,直至确认无潜在危险方可由远程控制中心自主分析监控;在车辆自动驾驶时,中心值守人员同时远程利用车内语音系统安抚乘客。
流程4:自动驾驶:远程控制中心通过车载控制器将车辆切换到自动驾驶模式;
上述第二种情况或第三种情况中切换到自动驾驶模式,远程控制中心控制10移动电机工作,使10移动电机用过9齿轮在11齿条作用下,带动17上支撑座通过16直线导轨向上移动;当上升17上支撑座碰到上位限为开关停止,同时信号传递给车载控制器;17上支撑座上升,带动14上转向轴向上移动,使19上离合盘与20下离合盘脱离接触;此时15方向盘任意转动,无法将方向传递到下方车轮;
在远程控制中心控制15方向盘上升使19上离合盘与20下离合盘脱离接触的同时,车载控制器使23蜗轮电机开始工作,首先保障车辆向正前方行驶方向不变;以102右位车载毫米波雷达智能盲点监测为主;101左位车载毫米波雷达智能盲点监测、103后位车载毫米波雷达智能盲点监测为辅,对车辆的左、右、后方向进行判断;通过雷达感知右后方来车距离;通过盲点监测和摄像头观察周围环境;使23蜗轮电机工作,通过2蜗轮蜗杆带动1下转向轴转动,带动车辆车轮转向,在多位车载毫米波雷达智能盲点监测测辅助下,使车辆向道路右侧路边安全平稳的靠边停车;在车辆靠右路边停车过程中,当102右位车载毫米波雷达智能盲点监测感知右侧来车较近时,车辆自动避让右侧来车,控制23蜗轮电机使车辆返回本车道;在车辆靠右路边停车过程中,当102右位车载毫米波雷达智能盲点监测感知右侧来车较远时,且速度不快,车载控制中心控制23蜗轮电机使车辆向右变道,直至到道路最右侧;车辆在进入自动驾驶模式时,远程控制中心同时发出预警,使中心值守人员密切关注该车辆行驶,直至确认车辆靠边停车。本方案采用驾驶位高清摄像头加音频采集进行传输到远程控制中心,进而对采集的画面和音频进行后台分析,判断当前情况;本方案采用伺服电机在9齿轮11齿条作用下,带动转向轴离合器分离,使车辆在自动驾驶状态下,通过2蜗轮蜗杆控制前进方向,通过车载雷达进行障碍判断,使车辆平稳靠边停车。
流程5:车辆靠边停车:当车辆靠边停车后,驾驶人员问题妥善解决后,由远程控制中心控制10移动电机运转,使17上支撑座向下运动,10移动电机向下运动过程中,触碰8下位限位开关停止运转,此时带动19上离合盘向下运动与20下离合盘重新接触,由驾驶员正常驾驶车辆进入道路正常行驶。
具体实施例3:
10移动电机、23蜗轮电机,采用佛山市藤尺机电设备有限公司产品,名称:2系列直流无刷电机配行星减速电机75W;型号:D2BLD75/PLE60;
3辅助轴承、5转向轴承,采用上海养贞轴承制造有限公司产品,根据实际需要选择合适产品;
201驾驶位区域音频视频监控摄像头;202乘客上下门区域高清摄像头;301车内舱前端高清摄像头;302车内舱后端高清摄像头,均采用海康威视高清摄像头,其中201高清摄像头带有音频采集装置为:标准版—拾音;
101左位车载毫米波雷达智能盲点监测,102右位车载毫米波雷达智能盲点监测,103后位车载毫米波雷达智能盲点监测,车载毫米波雷达智能盲点监测装置,采用广州敏视数码科技有限公司产品;名称:1080P 24GHz车载毫米波雷达BSD智能盲点监测系统,型号:BS-A21,HD-261D,FHD-639;
88下位限位开关、13上位限位开关,采用东莞市合智电子有限公司产品,名称:清楚开关,型号:TS-017A。
具体实施例4:
21固定座连接固定车辆合适位置固定;1下转向轴连接车轮转向横拉杆,并配合助力系统;
1下转向轴上端安装有20下离合盘;15方向盘安装在14上转向轴上端,下端连接固定19上离合盘;
17上支撑座通过5转向轴承连接固定14上转向轴;通过连接16直线导轨(含滑动座)固定在21固定座上;
11齿条固定在21固定座上,10移动电机用过18电机固定座固定在17上支撑座上;10移动电机轴端装有9齿轮与11齿条啮合;
23蜗轮电机通过22电机支架固定在21固定座上;
2蜗轮蜗杆安装在1下转向轴上,左端通过3辅助轴承固定在4支撑块上;4支撑块安装固定在21固定座上;2蜗轮蜗杆啮合连接;右端与23蜗轮电机连接;
8下位限位开关装在7下限位块上;13上位限位开关装在12上限位块上;7下限位块、12上限位块固定在21固定座上;
101左位车载毫米波雷达智能盲点监测、102右位车载毫米波雷达智能盲点监测,车载毫米波雷达&智能盲点监测(左、右),安装在车辆外侧的左右后视镜区域的合适高度位置;
103后位车载毫米波雷达智能盲点监测,安装在车辆外侧尾部中央位置的合适高度;
201驾驶位区域音频视频监控摄像头,安装固定在车舱内驾驶区域的右上方(用以对驾驶位区域的视频采集和车舱内音频采集);
202乘客上下门区域高清摄像头,安装固定在驾驶员背后左上方(用以对乘客上下门区域视频采集);
301车内舱前端高清摄像头,安装固定在车舱内前端上方的中央位置(用以对车舱内乘客视频采集);
302车内舱后端高清摄像头,安装固定在车舱内尾端上方的中央位置(辅助对车舱内乘客视频采集)。
由于以上所述仅为本发明的具体实施方式,但本发明的保护不限于此,任何本技术领域的技术人员所能想到本技术方案技术特征的等同的变化或替代,都涵盖在本发明的保护范围之内。
101左位车载毫米波雷达智能盲点监测;102右位车载毫米波雷达智能盲点监测;103后位车载毫米波雷达智能盲点监测;
201驾驶位区域音频视频监控摄像头;202乘客上下门区域高清摄像头;
301车内舱前端高清摄像头;302车内舱后端高清摄像头。
- 汽车安全系统
- 一种汽车安全系统