用于RF DAC的背景静态误差测量和时序偏斜误差测量
文献发布时间:2023-06-19 10:35:20
相关申请的交叉引用
本申请要求于2019年10月12日提交的标题为“用于RF DAC的背景静态误差测量和时序偏斜误差测量”的PCT申请PCT/CN2019/110785的权益和优先权,其全部内容通过引用合并于此。
技术领域
本公开一般地涉及数模转换器(DAC),并且更具体地但不限于涉及用于射频(RF)DAC的静态误差和时序偏斜误差的背景测量。
背景技术
DAC在各种应用中用于将数字信号转换为模拟信号。例如,处理器可以生成数字信号,而DAC可以将数字信号转换为适合在有线或无线介质上传输的模拟信号。DAC可以通过例如分辨率、速度/采样率、带宽、动态范围、谐波失真或噪声量、功耗、面积/大小等来表征。
DAC的设计可能会因目标规格而异。有些DAC专为精度而设计,而有些DAC专为提高速度而设计。所有的DAC都将包含DAC模块,这些模块可由数字输入的数据位控制,并有助于模拟输出。例如,可以控制DAC单元为模拟输出提供一定量的电荷。总体而言,DAC模块可用于将与数字输入相对应的模拟输出输出到DAC。
附图说明
为了提供对本公开及其特征和优点的更完整的理解,结合附图参考以下描述,其中,相同的附图标记表示相同的部分,其中:
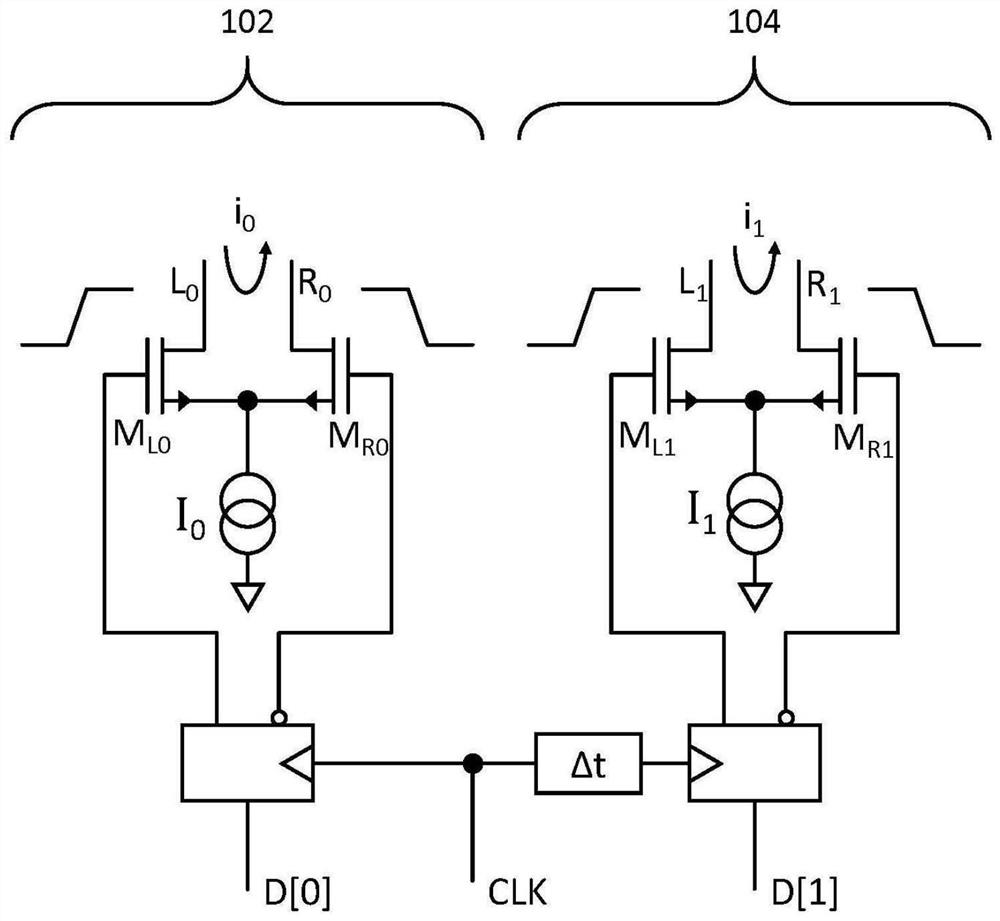
图1示出了根据本公开的一些实施例的两个示例性DAC单元。
图2示出了根据本公开的一些实施例的图1的两个示例性DAC单元的电流波形。
图3示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的示例性DAC。
图4示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的DAC,其中,抖动信号被数字地相加。
图5示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的另一DAC,其中在模拟域中添加了抖动信号;
图6示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的又一个DAC,其中在模拟域中添加了抖动信号;
图7-12示出了根据本公开的一些实施例的六个DAC单元的各自的交叉关联结果。
图13是示出根据本公开的一些实施例的用于提取DAC的静态误差和时序偏斜误差的方法的流程图;
图14是示出根据本公开的一些实施例的用于提取DAC的静态误差和时序偏斜误差的另一种方法的流程图。
具体实施方式
数模转换通过使用数字输入的数据位控制DAC单元来生成与数字输入对应的模拟输出。DAC单元分别对模拟输出做出贡献。由于工艺、电压和温度变化,DAC单元可能不匹配。不匹配会降低模拟输出的质量。要提取不匹配项,可以使用透明的抖动。可以通过观察模拟输出并执行观察到的输出与抖动的交叉关联来提取失配。提取后,可以相应地调整DAC单元以减少失配。
DAC架构
DAC可以采用多种架构实现。在某些情况下,DAC可以包括一串电阻器和可由数字输入的数据位控制的开关,以配置电阻器串并在模拟输出上输出不同的电压。在某些情况下,DAC可以包括R-2R电阻梯形和可通过数字输入的数据位控制的开关,以配置R-2R电阻梯形并在模拟输出上输出不同的电压。在某些情况下,DAC可以包括可由数字输入的数据位单独控制的电流源,以将电流引向DAC的输出或从DAC的输出引开,并在模拟输出上输出不同量的电流。在某些情况下,DAC可以包括一组电容器和可由数字输入的数据位控制的开关,以将电容器的极板连接至参考电压,以实现电荷重新分配并在模拟输出上输出不同的电压。
不管体系结构如何,DAC通常具有单独的元件,在本文中称为DAC单元,其大小确定为对DAC的模拟输出做出一定的权重。DAC单元可以是二进制编码的(例如,其中DAC单元根据2
DAC可以包括分段设计,其中DAC的各个部分使用不同的体系结构和/或称重方案来实现。例如,数字输入的一部分数据位可以控制以第一种架构实现的DAC,而DAC单元是二进制编码的,数字输入的另一部分数据位可以控制以第二种、不同的架构实现的DAC,DAC单元是温度计编码的。在一个示例中,将DAC分段为X-Y-Z分段DAC。X-Y-Z分段DAC具有用于X个最高有效位(MSB)的部分,用于Y个中间有效位(ISB)的部分和用于Z个最低有效位(LSB)的部分。MSB和ISB部分可以用温度计编码,而LSB部分是二进制编码。可以使用不同的DAC架构(例如,电阻串、R-2R、电流控制和电容DAC架构)来实现这些部分。
DAC单元的失配是什么,为什么失配很重要
由于工艺、温度和/或电压的变化,DAC单元的重量可能无法精确达到其理想重量。例如,一组DAC单元可能未完全进行二进制编码。对于一组用温度计编码的DAC单元,DAC单元的权重可能彼此不完全相同。DAC单元的权重的这种不匹配会导致DAC单元具有静态误差。而且,由于工艺、温度和/或电压的变化,DAC单元的开关并非都以相同的时序工作。开关时序的这种不匹配会导致DAC单元出现时序偏斜误差和占空比误差。
图1示出了根据本公开的一些实施例的两个示例性DAC单元。为了说明,DAC单元是电流控制DAC单元。本领域的技术人员将理解,其他类型的DAC单元(例如,包括电阻器或电容器)也将具有与失配相关的相同和/或相似的误差。图1示出了根据本公开的一些实施例的具有非理想权重和时序偏斜失配的两个电流控制DAC单元、电流控制DAC单元102和电流控制DAC单元104。工艺、电压和/或温度变化会导致不理想的重量和时序偏斜不匹配。
电流控制DAC单元具有电流源(对于DAC单元102表示为I
静态误差是由具有不理想权重的DAC单元引起的。对于电流控制DAC单元,不理想的权重可能是由电流源提供的非理想电流量与DAC单元的理想权重不匹配引起的。在某些情况下,静态误差称为DC(直流)错误。静态误差往往会在低频出现并占据主导地位。
时序偏斜误差是由DAC单元之间的时序偏斜差异引起的。两个电流控制DAC单元之间的时序偏斜Δt可以由时钟路径失配和不对称引起,即CLK信号到达DAC单元时会经历不同的延迟。结果,由于到达DAC单元的时钟信号CLK的时序偏斜,传递到DAC单元的各个输出的电荷或电流(分别表示为DAC单元102和104的i
占空比误差是由于DAC单元之间的晶体管失配引起的。结果,由于晶体管中的失配,在不同的开关实例(对于DAC单元102和104分别表示为i
图2示出了根据本公开的一些实施例的图1的两个示例性DAC单元的电流波形i
静态误差、时序偏斜误差和占空比误差很重要,因为具有许多DAC单元的DAC传递的总电荷将取决于信号。换句话说,静态误差、时序偏斜误差和占空比误差会导致信号相关误差。与信号有关的误差会引入谐波失真,并降低DAC的性能。特别是在DAC单元之间,时序偏斜误差和占空比误差对于高速DAC变得尤为重要,因为由时序偏斜和占空比失配引起的误差会随着时钟速度变快而在一个时钟周期内占全部电荷的较大部分。由于这些误差,DAC的信噪比和失真比(SNDR)和无杂散动态范围(SFDR)性能会大大降低。因此,对于高速DAC,DAC单元之间各种失配的校正可在实现高线性度方面发挥重要作用。
提取静态和时序偏斜误差的背景测量技术
当适当地运动DAC单元并观察DAC的模拟输出时,背景测量技术可以提取DAC的DAC单元的静态误差和时序偏斜误差。该测量技术将透明的抖动注入系统,使用观测器模数转换器(ADC)将DAC模拟输出数字化,并执行交叉关联以提取静态误差和时序偏斜误差信息。
注入透明抖动意味着注入抖动信号并消除/去除该信号。抖动信号可以是随机比特流(例如0和1,或-1和1)。随机比特流可以是伪随机序列,例如伪随机二进制序列。随机比特流可以由伪随机数生成器生成。抖动信号可能与DAC的数字输入不相关。抖动信号可以是窄带噪声信号,例如,在DAC的数字输入的频带之外的窄带噪声信号。抖动信号可以是宽带噪声信号。抖动信号可以具有其他合适的频率响应和/或频率响应的形状。抖动信号可能导致注入各种权重或值的透明抖动。示例性的权重或值可以包括0.5LSB、1LSB、1.5LSB、2LSB等。静态误差和时序偏斜误差的提取将起作用,而与抖动信号的权重或值无关。
注入抖动信号可以以不同的方式完成。例如,可以在数字域中注入一定权重的抖动信号(例如,对于独立的DAC)。在另一示例中,可以在模拟域中(例如,其中DAC在ADC的下游)注入一定权重的抖动信号。请注意,注入的抖动信号在DAC中运行相应的DAC单元。例如,注入的抖动信号可以使一个MSB DAC单元运行以注入一个MSB。为了消除/消除抖动,可以使用极性相反的相同抖动信号来执行不同的DAC单元,以在模拟域中减去注入的抖动信号。为此,可以在DAC中添加一个额外的/额外的DAC单元。例如,可以使用一个额外的MSB DAC单元来取消注入的MSB。以这种方式锻炼两个DAC单元会在DAC的输出端产生两个DAC单元之间的差异,这是因为DAC中的一个DAC单元使用了抖动信号,而DAC中的另一个DAC单元也用极性相反的相同抖动信号执行。两个DAC单元之间的差异将使彼此暴露出静态和时序偏斜误差,因为两个DAC单元已被有效地相互比较。DAC单元可以具有相同的重量。在某些情况下,DAC单元的权重可能(略有不同)。
DAC下游的观测器ADC用于数字化DAC的输出,其中包括两个DAC单元之间的差异。观测器ADC的速度可以与DAC相同,但可以根据需要采用其他速度(例如,比DAC慢一些)。观测器ADC可以是压控振荡器(VCO)ADC,也可以是其他类型的ADC。观测器ADC的数字输出(用作数据点)可以与抖动信号交叉关联。交叉关联是两个系列的滑点积或滑动内积(即观测器ADC的数字输出和抖动信号)。交叉关联结果的第一抽头可用于提取校准中的DAC单元的时序偏斜误差。第0和第1抽头可用于提取校准下的DAC单元的静态误差。
通过选择其他DAC单元以抵消注入的抖动信号,可以对其他DAC单元重复测量方案。通过选择其他DAC单元以抵消注入的抖动信号而产生的交叉关联结果会产生其他DAC单元的静态误差和时序偏斜误差。
时序偏斜误差可能相对较小,因此,可能需要很多数据点才能显示和提取时序偏斜误差。为了减少提取时序偏斜误差所需的数据点数量,可以两次获得交叉关联结果:首先通过使用抖动信号注入透明抖动,然后再次通过使用极性相反的相同抖动信号注入透明抖动。通过对两个交叉关联结果求和,可以消除与信号相关的本底噪声,从而可以用较少的数据点提取时序偏斜误差。
这种测量技术有很多优点。首先,测量技术可以在同一步骤中从相同的相关结果中提取静态和时序偏斜误差。因此,该测量技术是有效的,并且在硬件和校准时间上需要很少的开销。其次,测量技术是测量真正的DAC路径静态误差。在具有R-2R电阻梯形DAC的DAC中,通常会进行系统的电阻失配校准,但梯形电阻的随机失配不会得到校正。这种测量技术还可以提取电阻的随机失配。第三,由于该技术可以在后台使用,这意味着可以测量动态误差,例如与电压、温度和/或频率相关的误差,并随后对其进行校正或补偿。第四,由于它是背景校准,因此可以跟踪温度变化,因此无需实施两因素校准DAC,并且DAC设计节省了一些面积。通常,实施两因素校准DAC以跟踪温度变化及其对晶体管的阈值电压和迁移率(即电流)的影响。两因素校准DAC可以在室温下执行启动或前景校准,以校准DAC,并利用附加电路跟踪背景温度变化。利用这种背景测量技术,可以提取并补偿温度变化的副作用(例如,静态误差和时序偏斜误差)。因此,可以大大简化DAC电路。第五,测量技术足够灵活,可用于提取各种DAC的DAC单元的静态误差和时序偏斜误差,包括但不限于:独立(高速)DAC(即DAC不用作模数转换的一部分),生成模拟信号作为模数转换的一部分的DAC,流水线ADC内的DAC,逐次逼近寄存器ADC内的DAC,连续时间delta sigma调制器内部的DAC,连续时间流水线ADC中的DAC,以及在具有连续时间前端和VCO ADC后端的流水线ADC中的DAC。
测量技术将增加一些面积和功率损失。但是,将VCO ADC用作观测器ADC会限制增加的面积和功耗,因为VCO ADC是高度/大部分是数字的,并且其尺寸随着工艺的变小而缩小。用于执行交叉关联的数字处理电路的功耗的粗略估计为5mW。再加上来自VCO ADC的25mW和其他小型数字模块,总增加的功耗可能小于40mW。
在以下段落中,将更详细地描述上述特征的细节,变化和优点。
具有静态误差和时序偏斜测量的示例性DAC
图3示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的示例性DAC 300。具有静态误差和时序偏斜测量的示例性DAC 300包括解码器302和形成DAC内核304的多个DAC单元。DAC 300可以在DAC单元的模拟输出处包括放大器306,观测器ADC 308可以观察放大器306的输出,并量化放大器306的输出(即,DAC单元的模拟输出)。在某些情况下,在放大器306的输出处存在混频器310。混频器310在DAC输出的正常路径中。观测器ADC 308在DAC输出的观测器路径中。
解码器302接收其中添加的数字输入和抖动信号。通常,解码器302是可选的,但是可以包括在DAC 300中以将数字输入解码为控制DAC核心304中的各个DAC单元的数据位。例如,解码器302可以包括二进制至温度计解码器312以用于将添加了抖动信号的二进制数字输入转换为温度计编码的数据位。解码器302可以被包括在DAC中,以将数字输入解码为适合于驱动分段DAC的DAC单元的数据位。例如,解码器302可以将二进制数字输入的一部分(例如,MSB和ISB)解码为温度计编码的数据位,以驱动具有相同权重的DAC单元,并直接使用一部分二进制数字输入(例如LSB)而不进行解码,直接作为二进制编码数据位来驱动具有二进制权重的DAC单元。为了简单起见,图3示出了DAC 300,其接收二进制数字输入并且使用具有相同权重(经温度计编码)的DAC核304中的DAC单元来生成模拟输出。
尽管在图3中未明确示出,但是DAC 300可以是分段DAC的一部分。具体而言,显示了MSB段。本领域的技术人员将理解,本文描述的背景测量技术适用于测量ISB或LSB段中的DAC单元的误差,并且也适用于测量其他类型的DAC中的DAC单元的误差。
为了说明,图3中的解码器302接收其上添加了抖动信号D_Dit的4位二进制数字输入,并且二进制至温度计解码器312以从4位二进制数字输入生成15个温度计编码数据位,显示为B2T[0]、B2T[1]、...B2T[13]和B2T[14]。添加到数字输入的抖动信号D_Dit可以影响数据位(例如B2T[0]),并行使DAC内核304中的一个DAC单元。在一些实施例中,抖动信号D_Dit被数字地添加到二进制输入到温度计解码器312的数字输入。解码器的加法器314将抖动信号D_Dit数字地相加到数字输入。将抖动信号添加到数字输入可以通过数字方式或在模拟域中完成,如图4-6所示。
遵循相同的说明性示例,为了将15个温度计编码的数据位转换为模拟输出,DAC内核304具有15个DAC单元,每个DAC单元由相应的温度计编码的数据位驱动。将附加的DAC单元添加到DAC核304,以减去注入的抖动信号,以实现透明抖动方案。因此,DAC核心304具有16个DAC单元,显示为MSB0、MSB1、...MSB14和MSB15。将16个DAC单元的输出组合/求和以形成DAC内核304的模拟输出。为了暴露校准中的DAC单元的静态误差和时序偏斜误差,可以选择DAC单元以接收极性相反的抖动信号
解码器302可以被实现为允许选择不同的DAC单元作为被校准的DAC单元,即,利用具有相反极性
遵循相同的说明性示例,当测量显示为MSB15的第一个MSB DAC单元时,解码器输出D[15]将是极性相反的抖动信号
当测量第二个MSB DAC单元(如MSB14)时,解码器输出D[14]将是极性相反的抖动信号
当测量第三个MSB DAC单元(如MSB13)时,解码器输出D[13]将是极性相反的抖动信号
可以继续进行此桶形移位,以选择其他MSB DAC单元作为要校准的DAC单元。
当测量最后一个MSB DAC单元(如MSB0)时,解码器输出D[0]将是极性相反的抖动信号
如图3所示,桶形移位可以使用如多路复用器316
尽管该说明性示例描述了桶形移位,其中逐个依次选择了DAC单元,例如从MSB15到MSB0,但选择DAC单元作为校准中的DAC单元的顺序不会影响背景测量技术,可以采用DAC单元的选择顺序,因为可以采用校准后的DAC单元。
可以在解码器302中实现其他合适的开关逻辑,以为极性相反的抖动信号
注意,第一DAC单元(例如,校准中的DAC单元)可以具有与抖动信号相同的权重。但是,在某些情况下,第一个DAC单元的权重可能与抖动信号的权重不同。
VCO ADC作为观测器ADC
再次参考图3,观测器ADC 308量化DAC核心304的输出,该输出在放大器306的输出处可观察到(即,DAC单元的模拟输出)。观察到的DAC内核304的输出是由于将透明抖动注入到系统中而产生的,例如,是由于数字输入的结果而产生的,该数字输入中添加了抖动信号,从而驱动了解码器302,具有相反极性
观测器ADC 308可以是VCO ADC。VCO ADC是一阶delta sigma ADC,VCO用作具有无限直流(DC)增益(即DC或零频率下的无限增益)的连续时间积分器。如图2所示,积分器在积分误差电荷et和es方面特别有效。其他非集成ADC也可以提取误差电荷et和es,但可能必须以比VCO ADC或集成ADC更高的速度运行。另外,由于VCO ADC主要是数字的,因此VCO ADC在28nm工艺中的占位面积很小,并且可以随着工艺的发展而不断扩展。一个VCO ADC的最大面积为0.1mm
DAC 300还包括数字处理电路320,以使数字输出V1和抖动信号D_Dit交叉关联,并基于数字输出V1和抖动信号D_Dit的交叉关联,提取第一DAC单元的静态误差和时序偏斜误差。例如,数字处理电路320可以包括交叉关联电路360,以执行数字输出V1的数据点和抖动信号D_Dit的交叉关联。在描述图7-12中所示的示例性交叉关联结果的段落中更详细地解释了交叉关联电路360。数字处理电路320还包括误差计算电路370,以根据来自交叉关联电路360的交叉关联结果来计算静态误差和时序偏斜误差。
添加抖动信号
如前所述,取决于实现方式,可以以不同方式添加抖动信号D_Dit。
图4示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的DAC,其中抖动信号D_Dit被数字地相加。为了数字地添加抖动信号,在解码器302中包括数字加法器314,以将抖动信号D_Dit添加到解码器302的数字输入。
图5示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的DAC,其中在模拟域中添加了抖动信号D_Dit。如本文所讨论的那样实现解码器502,以将极性相反的数据位和抖动信号的位提供给DAC单元。然而,解码器502缺少用于将抖动信号数字地相加的数字加法器。抖动信号D_Dit被添加到模拟域中。DAC核心504中的抖动信号D_Dit,其包括由抖动信号D_Dit驱动的抖动DAC单元506,例如MSB16。在该说明性示例中,抖动DAC单元506接收抖动信号D_Dit。由具有相反极性的抖动信号(D_Dit)驱动的DAC核心504中的另一个DAC单元抵消了为实现透明抖动方案而添加的抖动。因此,DAC核心504具有17个DAC单元(即,两个附加的DAC单元)。抖动DAC单元506可以被视为参考DAC单元,针对其测量其他DAC单元。由解码器502实现的桶形移位(如关于图3所描述的)可以使得能够测量一次DAC单元中DAC内核504中其他DAC单元的静态误差和时序偏斜误差。抖动DAC单元506可以具有与校准下的DAC单元相同的重量,或者抖动DAC单元506可以具有与校准下的DAC单元不同的重量。
图6示出了根据本公开的一些实施例的具有静态误差和时序偏斜测量的DAC,其中在模拟域中添加了抖动信号D_Dit。图6中所示的信号链可以在收发器中找到。如本文所讨论的那样实现解码器614,以将极性相反的数据位和抖动信号的位提供给DAC单元。然而,解码器614缺少用于将抖动信号数字地相加的数字加法器。ADC 606在DAC的上游,并且可以产生到解码器614的数字输入。将抖动信号D_Dit在模拟域中添加到ADC 606的模拟输入。在该说明性示例中,包括抖动DAC单元602,并且抖动DAC单元602接收抖动信号D_Dit。加法节点604将抖动信号D_Dit的模拟等效项(由抖动DAC单元602生成)添加到ADC 606的模拟输入。ADC 606生成数字输出信号,该抖动被添加到该数字输出信号。该数字输出信号可以由数字处理电路系统612处理。数字处理电路系统612可以生成添加了抖动信号的数字输入。然后,其上添加了抖动信号的数字输入由解码器614处理。抖动DAC单元602的权重可以与第一DAC单元(例如,正在校准的DAC单元)的权重相同,或者抖动DAC单元602可以具有与第一DAC单元不同的权重。
与图5中注入抖动信号的点与消除抖动信号的点之间的信号路径相比,对图6中注入抖动信号的点与消除抖动信号的点之间的信号路径的控制较少。因此,图6中的实施方式不是优选的,因为测量方案可能被信号路径中的其他误差所污染。
另外,在模拟域中注入抖动信号(例如图5-6)比在数字域中注入抖动信号(例如图3-4)更不受欢迎,因为抖动DAC单元本身会给测量方案带来误差。
基于交叉关联和示例性交叉关联结果得出静态误差和时序偏斜误差
再次参考图2,标记为i
如果忽略静态误差,仅考虑时序偏斜误差,则底部波形的Z域变换(即具有透明抖动的DAC输出)将为:-1+1-et+etZ
·等式1:-(es+et)=value of 0th tap of cross-correlation result
·等式2:et=value of 1st tap ofcross
根据等式2,可以从交叉关联结果的第1个抽头的值中直接获得et表示的时序误差。由es表示的静态误差可以从第0个抽头的值和交叉关联结果的第一个抽头的值获得。将交叉关联结果的第一个抽头的值即et替换为-(es+et),它等于交叉关联结果的第0个抽头的值,可以使es被求解/确定。
交叉关联可以例如通过图3-6的交叉关联电路360来执行。交叉关联结果的第0和第1抽头包括静态和时序偏斜误差的信息,并且可以例如由图3-6的误差计算电路370使用,以仅从一个交叉关联中提取/估计正在校准的DAC单元的静态和时序误差。
虽然有可能从交叉关联结果中提取静态和时序偏斜误差,但是本发明所设想的一些实施方式可以仅提取静态误差(而不是时序偏斜误差),并且本公开所设想的一些实施方式可以仅提取时序偏斜误差(而不是静态误差)。换句话说,没有必要从交叉关联结果中提取静态和时序偏斜误差。
图7-12示出了根据本公开的一些实施例的六个DAC单元的各自的交叉关联结果。可以在交叉关联结果中观察到强相关性。第0个抽头和第1个抽头在每个图中都有标记。
注意,交叉关联结果显示了与信号相关的本底噪声,这可以从正弦波包络中看出。本底噪声会影响提取精度。解决与误差提取精度相关的本底噪声的一种方法是增加观测器ADC的数字输出的数据点数,以提高交叉关联信噪比(即使第0和第1个抽头比本底噪声大得多),误差提取可能需要1600万个或更多的交叉关联点。
解决存在与信号相关的本底噪声的情况下,误差提取精度的另一种方法是使用透明抖动方案将相同的抖动信号注入两次,并获得两个交叉关联的结果:第一次使用抖动信号(其中极性相反的抖动信号驱动正在校准的DAC单元),第二次使用具有相反极性的抖动信号(其中,抖动信号驱动处于校准状态的DAC单元)。通过将分别注入抖动信号和注入极性相反的抖动信号所获得的两个交叉关联结果相加(轻触求和),消除了与信号相关的本底噪声,同时使静态/定时误差加倍。从总的交叉关联结果中提取的误差可以减半(即,除以二)。256,000个交叉关联点可能足以提取低至0.05%水平精度的误差。
执行交叉关联在计算上可能是昂贵的,因此,背景测量方案可能仅不时地运行(即,不是一直都在运行)。
提取静态误差和时序偏斜误差的方法
图13是示出根据本公开的一些实施例的用于提取DAC的误差的方法的流程图。例如,误差可以包括以下一项或多项:静态误差和时序偏斜误差。DAC具有解码器(例如,图3和图4的解码器302,图5的解码器502和图6的解码器614)以及由解码器的输出驱动的DAC单元(例如,图3的D[15]-D[0])。
在1302中,解码器可以接收具有添加到其的第一抖动信号的数字输入。第一抖动信号的一个例子是如图3-6所示的抖动信号D_Dit。
在1304中,可以由具有相反极性的第一抖动信号来驱动第一DAC单元(例如,如关于图3所描述的在校准中的DAC单元)。如图3所示,标记为MSB15的DAC单元(如果被选作校准中的DAC单元)可以由极性相反的抖动信号位
在1306中,观测器ADC(例如,图3-6的观测器ADC 308)可以通过将具有相反极性的第一抖动信号产生的DAC的第一模拟输出数字化,从而驱动第一DAC单元(即,由于施加了透明抖动而产生的极性),来产生第一数字输出(例如,图3-6的V1)。
在1308中,数字处理电路(例如,图3-6的数字处理电路320,具体地,交叉关联电路360)可以使第一数字输出和第一抖动信号交叉关联。交叉关联结果的示例在图7-12中显示。
在1310中,数字处理电路系统(例如,图3-6的数字处理电路系统320,特别是误差计算电路系统370)可以基于第一数字输出和第一抖动信号的交叉关联提取以下一个或多个:第一DAC单元的第一静态误差和第一时序偏斜误差。在与图7-12相关的段落中解释了交叉关联结果的示例以及交叉关联如何暴露在校准下的DAC单元的静态误差和时序偏斜误差。
在一些实施例中,数字域中的解码器或其他合适的电路将第一抖动信号数字地添加到数字输入。数字加法第一个抖动信号如图3-4所示。在一些实施例中,第一抖动信号因此在模拟域中被添加到ADC的模拟输入信号。ADC产生具有添加到其的第一抖动信号的数字输入。图5-6示出了在模拟域中相加第一抖动信号的各种实施例。
如前所述,第零抽头和第一抽头建立两个方程式和两个未知数,从而允许从交叉关联结果中提取静态误差和时序偏斜误差。提取第一静态误差和第一时序偏斜误差可以包括基于所述第一数字输出和所述第一抖动信号的交叉关联的第一抽头的值,得出所述第一时序偏斜误差。提取第一静态误差和第一时序偏斜误差可以包括基于所述第一数字输出和所述第一抖动信号的交叉关联的第零抽头的值和第一抽头的值,得出所述第一静态误差。
为了在存在与信号相关的本底噪声的情况下提取静态误差和时序偏斜误差,可以执行两次测量:一次是将抖动信号注入作为透明抖动,另一次是将极性相反的抖动信号注入作为透明抖动。为了使用注入有相反极性的抖动信号作为透明抖动来执行测量,该方法可以进一步包括:通过所述解码器接收其上添加具有相反极性的第一抖动信号的数字输入,通过所述第一抖动信号驱动所述第一DAC单元,通过数字化由驱动所述第一DAC单元的第一抖动信号产生的DAC的第一互补模拟输出来产生第一互补数字输出,和交叉关联所述第一互补数字输出和相反极性的第一抖动信号。然后求和:(1)第一数字输出和第一抖动信号的交叉关联,和(2)第一互补数字输出的相反极性的第一抖动信号的交叉关联。基于求和的交叉关联结果的第零抽头的值和第一抽头的值,可以提取第一DAC单元的第一静态误差和第一时序偏斜误差。由于在对交叉关联结果求和时误差会加倍,基于求和的交叉关联结果的第零抽头的值的一半和第一抽头的值的一半,可以提取第一DAC单元的第一静态误差和第一时序偏斜误差。
为了测量正在校准的另一个DAC单元的静态误差和时序误差,可以对第二个DAC单元重复1202-1210。例如,例如,该方法可以进一步包括:通过所述解码器接收其上添加第二抖动信号的数字输入,通过相反极性的第二抖动信号驱动第二DAC单元(例如,另一个在校准的DAC单元),通过数字化由具有驱动所述第二DAC单元的相反极性的第二抖动信号产生的DAC的第二模拟输出来产生第二数字输出,使所述第二数字输出和所述第二抖动信号交叉关联,和基于第二数字输出和第二抖动信号的交叉关联,提取第二DAC单元的第二静态误差和第二时序偏斜误差。各种开关方案,例如图3所示的方案,可用于选择第二个DAC单元或任何其他DAC单元作为要校准的下一个DAC单元。
图14是示出根据本公开的一些实施例的用于提取DAC的静态误差和时序偏斜误差的另一种方法的流程图。在1402中,将抖动信号添加到DAC。图3-6给出了三种用于将抖动信号添加到DAC的不同方案。在1304中,DAC中的DAC单元消除注入到DAC中的抖动信号。例如,DAC单元可以由具有相反极性的抖动信号驱动以消除相加的抖动信号。作为1402和1404的结果,注入了透明的抖动(如参考图3-6所述的示例所示)。在1404,观测器ADC(例如,图3-6的观测器ADC308)量化DAC的输出并产生第一数字输出。在1406,数字处理电路(例如,图3-6的数字处理电路320)从第一数字输出中提取DAC单元的静态误差和时序偏斜误差中的一个或多个。
交叉关联的结果产生在校准的DAC单元的静态误差和时序偏斜误差。如前所述,第零抽头和第一抽头建立两个方程和两个未知数,从而允许从交叉关联结果中提取静态误差和时序偏斜误差。提取静态误差和时序偏斜误差中的一个或多个可以包括:将所述抖动信号与所述第一数字输出交叉关联,和从交叉关联的第零抽头的值和第一抽头的值,获得所述静态误差和所述时序偏斜误差。提取静态误差和时序偏斜误差中的一个或多个可以包括:基于第一数字输出和抖动信号的交叉关联的第一抽头的值得出时序偏斜误差。提取静态误差和时序偏斜误差中的一个或多个可以包括:基于第一数字输出和抖动信号的交叉关联的第零抽头和第一抽头的值得出静态误差。交叉关联结果的示例以及交叉关联如何在校准下暴露DAC单元的静态误差和时序偏斜误差的示例在与图7-12相关的段落中进行说明。
为了在存在与信号相关的本底噪声的情况下提取静态误差和时序偏斜误差,可以执行两次测量:一次是将抖动信号注入作为透明抖动,另一次是将极性相反的抖动信号注入作为透明抖动。为了使用注入的具有相反极性的抖动信号作为透明抖动来执行测量,该方法可以进一步包括将具有相反极性的抖动信号添加到DAC,通过DAC中的DAC单元消除注入到DAC的具有相反极性的抖动信号,量化DAC的输出并生成第二个数字输出,并从第一数字输出和第二数字输出中提取DAC单元的静态误差和时序偏斜误差中的一个或多个。具体地,提取所述静态误差和所述时序偏斜误差中的一个或多个包括:将所述抖动信号与所述第一数字输出交叉关联,将极性相反的抖动信号与第二数字输出交叉关联,对交叉关联结果求和,并从求和的交叉关联结果的第零抽头的值的一半和第一抽头的值的一半获得静态误差和时序偏斜误差。
将抖动信号添加到DAC可以包括将抖动信号数字地添加到DAC的输入。这样的方案由图3-4示出。将抖动信号添加到DAC可以包括将抖动信号添加到DAC内核中的抖动DAC单元。图5示出了这种方案。在一些情况下,将抖动信号添加到DAC包括将抖动信号添加到ADC的模拟输入信号,并且通过ADC生成具有添加到其中的抖动信号的DAC的输入。图6说明了这种方案。
为了测量正在校准的另一个DAC单元的静态误差和时序误差,可以对另一个DAC单元重复1402-1408。各种切换方案,例如图3所示的方案,可用于选择另一个DAC单元或任何其他DAC单元作为要校准的下一个DAC单元。
尽管有可能从交叉关联结果中提取静态和时序偏斜误差(如图13和14中的方法所示),但本发明所设想的一些实现方式可能仅提取静态误差(而不是时序偏斜误差),并且本发明所设想的一些实施方式可能仅提取时序偏斜误差(而不是静态偏斜)。换句话说,没有必要从交叉关联结果中提取静态和时序偏斜误差。
例子
例子1是一种用于提取具有解码器和由所述解码器的输出驱动的多个DAC单元的数模转换器(DAC)的误差的方法,该方法包括:通过所述解码器接收其上添加第一抖动信号的数字输入;通过具有相反极性的第一抖动信号来驱动第一DAC单元;通过数字化由具有驱动所述第一DAC单元的相反极性的第一抖动信号产生的DAC的第一模拟输出来产生第一数字输出;使所述第一数字输出和所述第一抖动信号交叉关联;和基于所述第一数字输出和所述第一抖动信号的交叉关联,提取所述第一DAC单元的第一静态误差和第一时序偏斜误差中的一个或多个。
在例子2,例子1的方法可以任选地包括:通过所述解码器将所述第一抖动信号数字地添加到所述数字输入。
在例子3,例子1的方法可以任选地包括:将第一抖动信号添加到ADC的模拟输入信号;并通过ADC产生其上添加第一抖动信号的数字输入。
在例子4,例子1-3中任一个的方法可以任选地包括:提取所述第一静态误差和所述第一时序偏斜误差中的一个或多个包括:基于所述第一数字输出和所述第一抖动信号的交叉关联的第一抽头的值,得出所述第一时序偏斜误差。
在例子5,例子1-4中任一个的方法可以任选地包括:提取所述第一静态误差和所述第一时序偏斜误差中的一个或多个包括:基于所述第一数字输出和所述第一抖动信号的交叉关联的第零抽头的值和第一抽头的值,得出所述第一静态误差。
在例子6,例子1-5中任一个的方法可以任选地包括:通过所述解码器接收其上添加具有相反极性的第一抖动信号的数字输入;通过所述第一抖动信号驱动所述第一DAC单元;通过数字化由驱动所述第一DAC单元的第一抖动信号产生的DAC的第一互补模拟输出来产生第一互补数字输出;交叉关联所述第一互补数字输出和相反极性的第一抖动信号;和求和所述第一数字输出和第一抖动信号的交叉关联、以及所述第一互补数字输出和相反极性的第一抖动信号的交叉关联。
在例子7,例子1的方法可以任选地包括:提取所述第一静态误差和所述第一时序偏斜误差中的一个或多个包括:基于求和的交叉关联结果的第零抽头的值和第一抽头的值,提取所述第一DAC单元的第一静态误差和第一时序偏斜误差中的一个或多个。
在例子8,例子6或7的方法可以任选地包括:提取所述第一静态误差和所述第一时序偏斜误差中的一个或多个包括:基于求和的交叉关联结果的第零抽头的值的一半和第一抽头的值的一半,提取所述第一DAC单元的第一静态误差和第一时序偏斜误差中的一个或多个。
在例子9,例子1-8中任一个的方法可以任选地包括:通过所述解码器接收其上添加第二抖动信号的数字输入;通过具有相反极性的第二抖动信号来驱动第二DAC单元;通过数字化由具有驱动所述第二DAC单元的相反极性的第二抖动信号产生的DAC的第二模拟输出来产生第二数字输出;使所述第二数字输出和所述第二抖动信号交叉关联;和基于所述第二数字输出和所述第二抖动信号的交叉关联,提取所述第二DAC单元的第二静态误差和第二时序偏斜误差中的一个或多个。
例子10是具有误差测量的数模转换器(DAC),该数模转换器包括:解码器,用于接收其中添加的数字输入和抖动信号;多个DAC单元,包括:第一DAC单元,用于接收相反极性的抖动信号;和由与其中添加的数字输入和抖动信号相对应的数据位驱动的另外的DAC单元;和观测器ADC,用于量化由驱动所述第一DAC单元的极性相反的抖动信号产生的DAC单元的模拟输出,并产生数字输出。
在例子11,例子10的DAC可以任选地包括:数字处理电路,用于对所述数字输出和所述抖动信号交叉关联,并基于所述数字输出和所述抖动信号的交叉关联来提取所述第一DAC单元的静态误差和时序偏斜误差。
在例子12,例子10或11的DAC可以任选地包括:解码器包括二进制至温度计解码器,用于将其中添加的数字输入和抖动信号转换为数据位。
在例子13,例子10-12中任一个的DAC可以任选地包括:解码器包括加法器,用于将所述抖动信号与所述数字输入相加。
在例子14,例子10-12中任一个的DAC可以任选地包括:抖动DAC单元,用于接收抖动信号;求和节点,用于将抖动信号添加到ADC的模拟输入;和ADC,用于产生其中添加抖动信号的数字输入。
在例子15,例子10-14中任一个的DAC可以任选地包括:解码器包括:第一多路复用器,用于输出所述数据位的第一位和所述抖动信号中的一个;和第二多路复用器,用于输出所述数据位的第二位和所述相反极性的抖动信号中的一个。
在例子16,例子10-15中任一个的DAC可以任选地包括:解码器包括:第三多路复用器,用于输出所述数据位和所述相反极性的抖动信号中的一个。
在例子17,例子10-16中任一个的DAC可以任选地包括:观测器ADC是VCO模数转换器。
在例子18,例子10-17中任一个的DAC可以任选地包括:第一DAC单元具有与抖动信号相同的权重。
在例子19,例子10-17中任一个的DAC可以任选地包括:所述第一DAC单元的权重与所述抖动信号的权重不同。
在例子20,例子10-19中任一个的DAC可以任选地包括:DAC是独立的DAC。
在例子21,例子10-19中任一个的DAC可以任选地包括:DAC生成模拟信号作为模数转换的一部分。
例子22是具有误差测量的数模转换器(DAC),该数模转换器包括:解码器,用于接收数字输入;多个DAC单元,包括:第一DAC单元,用于接收相反极性的抖动信号;由对应于数字输入的数据位驱动的其他DAC单元;和抖动DAC单元,用于接收抖动信号;和观测器ADC,用于量化由驱动第一DAC单元的相反极性的抖动信号产生的DAC单元的模拟输出,并产生数字输出。
在例子23,例子22的DAC可以任选地包括:数字处理电路,用于对所述数字输出和所述抖动信号交叉关联,并基于所述数字输出和所述抖动信号的交叉关联来提取所述第一DAC单元的静态误差和时序偏斜误差。
在例子24,例子22或23的DAC可以任选地包括:解码器包括:第一多路复用器,用于输出所述数据位的第一位和所述抖动信号中的一个;和第二多路复用器,用于输出所述数据位的第二位和所述相反极性的抖动信号中的一个。
在例子25,例子22-24中任一个的DAC可以任选地包括:解码器包括:第三多路复用器,用于输出所述数据位和所述相反极性的抖动信号中的一个。
在例子26,例子22-25中任一个的DAC可以任选地包括:观测器ADC是VCO模数转换器。
例子27是一种提取数模转换器(DAC)的误差的方法,包括:将抖动信号添加到DAC;通过DAC中的DAC单元消除注入所述DAC的输入的抖动信号;量化DAC的输出并产生第一数字输出;和从所述第一数字输出提取所述DAC单元的静态误差和时序偏斜误差中的一个或多个。
在例子28,例子27的方法可以任选地包括:提取所述静态误差和所述时序偏斜误差中的一个或多个包括:将所述抖动信号与所述第一数字输出交叉关联;和从交叉关联的第零抽头的值和第一抽头的值,获得所述静态误差和所述时序偏斜误差。
在例子29,例子27或28的方法可以任选地包括:将相反极性的抖动信号添加到DAC;通过DAC中的DAC单元消除注入所述DAC的相反极性的抖动信号;量化DAC的输出并产生第二数字输出;和从所述第一数字输出和所述第二数字输出提取所述DAC单元的静态误差和时序偏斜误差中的一个或多个。
在例子30,例子27-29中任一个的方法可以任选地包括:提取所述静态误差和所述时序偏斜误差中的一个或多个包括:将所述抖动信号与所述第一数字输出交叉关联;交叉关联相反极性的抖动信号和第二抖动输出;求和交叉关联结果;和从求和的交叉关联结果的第零抽头的值的一半和第一抽头的值的一半,获得静态误差和时序偏斜误差。
在例子31,例子27-30中任一个的方法可以任选地包括:将抖动信号添加到DAC包括:将抖动信号数字地添加到DAC的输入。
在例子32,例子27-30中任一个的方法可以任选地包括:将抖动信号添加到DAC包括:将抖动信号添加到ADC的模拟输入信号;并通过ADC产生其中添加抖动信号的DAC的输入。
在例子33,例子27-30中任一个的方法可以任选地包括:将抖动信号添加到DAC包括:使用所述抖动信号驱动抖动DAC单元。
在例子34,例子27-33中任一个的方法可以任选地包括:提取所述静态误差和所述时序偏斜误差中的一个或多个包括:基于第一数字输出和抖动信号的交叉关联的第一抽头的值得出时序偏斜误差。
在例子35,例子27-34中任一个的方法可以任选地包括:提取所述静态误差和所述时序偏斜误差中的一个或多个包括:基于第一数字输出和抖动信号的交叉关联的第零抽头和第一抽头的值得出静态误差。
例子36是包括用于执行本文描述的任何一种方法的装置的设备。
其他实施说明、变体和应用
在一个示例实施例中,可以在关联的电子设备的板上实现任意数量的附图的电路。该板可以是通用电路板,其可以容纳电子设备的内部电子系统的各种组件,并且还可以提供用于其他外围设备的连接器。更具体地说,该板可提供电连接,系统的其他组件可通过该电连接进行电通信。可以基于特定的配置需求、处理需求、计算机设计等,将任何合适的处理器(包括数字信号处理器、微处理器、支持芯片组等)、计算机可读非暂时性存储元件等适当地耦合至板。其他组件(例如外部存储器、附加传感器、用于音频/视频显示的控制器和外围设备)可以通过电缆作为插入卡连接到板上,也可以集成到板上。在各种实施例中,本文描述的功能可以以仿真形式实现为在以支持这些功能的结构布置的一个或多个可配置(例如,可编程)元件内运行的软件或固件。可以在包括允许处理器执行那些功能的指令的非暂时性计算机可读存储介质上提供提供仿真的软件或固件。
在另一个示例实施例中,附图的电路可以实现为独立模块(例如,具有关联的组件和配置为执行特定应用程序或功能的电路的设备),也可以实现为电子设备的专用硬件中的插入模块。注意,本公开的特定实施例可以容易地部分地或整体地包括在片上系统(SOC)封装中。SOC代表将计算机或其他电子系统的组件集成到单个芯片中的IC。它可能包含数字、模拟、混合信号以及通常的RF功能:所有这些功能都可以在单个芯片基板上提供。其他实施例可以包括多芯片模块(MCM),其中多个分离的IC位于单个电子封装内并且被配置为通过电子封装彼此紧密地相互作用。在各种其他实施例中,数字滤波器可以在专用集成电路(ASIC)、现场可编程门阵列(FPGA)和其他半导体芯片中的一个或多个硅核中实现。
还必须注意,本文中概述的所有规格、尺寸和关系(例如,处理器的数量、逻辑运算等)仅出于示例和教导的目的而提供。在不脱离本公开的精神或所附权利要求的范围的情况下,可以对这些信息进行相当大的改变。这些规范仅适用于一个非限制性示例,因此,它们应照此解释。在前面的描述中,已经参考特定处理器和/或组件布置描述了示例实施例。在不脱离所附权利要求的范围的情况下,可以对这些实施例进行各种修改和改变。因此,说明书和附图应被认为是说明性的而不是限制性的。
测量DAC静态误差和时序偏斜误差的背景技术特别适合于DAC性能至关重要的高速、宽带、高精度应用。可以从该体系结构中受益匪浅的应用包括:仪器、测试、频谱分析仪、军事用途、雷达、有线或无线通信、移动电话(特别是因为标准继续推动更高速度的通信)和基站。这些产品用于有线和无线通信、仪器仪表、雷达、电子战和其他应用。
注意,利用本文提供的众多示例,可以根据两个、三个、四个或更多个电子组件来描述交互。但是,这样做只是出于清楚和示例的目的。应当理解,可以以任何合适的方式来合并系统。沿着类似的设计替代方案,附图中任何示出的组件、模块和元件可以以各种可能的配置进行组合,所有这些显然都在本说明书的广泛范围内。在某些情况下,仅参考有限数量的电气元件来描述一组给定流程的一个或多个功能可能会更容易。应当理解,附图的电路及其教导易于扩展,并且可以容纳大量的组件,以及更复杂/复杂的布置和配置。因此,提供的示例不应限制范围或抑制可能潜在地应用于无数其他架构的电子电路的广泛教导。
注意,在本说明书中,对包括在“一个实施例”、“示例实施例”、“实施例”、“另一实施例”、“一些实施例”、“各种实施例”、“其他实施例”、“替代实施例”等中的各种特征(例如,元件、结构、模块、组件、步骤、操作、特性等)的引用旨在表示任何这样的特征包括在本公开的一个或多个实施例中,但是可以或可以不必在相同的实施例中组合。
还必须注意,与背景测量技术有关的功能(例如,图13-14中所示的过程)仅说明了可能由图3-6中所示的系统执行或在其中执行的某些功能。这些操作中的一些可以在适当的地方被删除或移除,或者可以在不脱离本公开的范围的情况下对这些操作进行相当大的修改或改变。另外,这些操作的时间安排可能会大大改变。出于示例和讨论的目的,提供了上述操作流程。本文描述的实施例提供了很大的灵活性,因为在不脱离本公开的教导的情况下,可以提供任何合适的布置、时序、配置和定时机制。
本领域技术人员可以确定许多其他改变、替换、变化、变更和修改,并且意图是本公开涵盖落入所附权利要求范围内的所有此类改变、替换、变更、替换和修改。注意,上述装置的所有可选特征也可以相对于本文描述的方法或过程来实现,并且示例中的细节可以在一个或多个实施例中的任何地方使用。
- 用于RF DAC的背景静态误差测量和时序偏斜误差测量
- 叠对误差测量结构以及叠对误差测量方法