一种三重调位门式起重机
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及货物夹取设备技术领域,尤其涉及一种三重调位门式起重机。
背景技术
现有的货物起重设备一般是逐一起吊,即抓取一个货物,放到指定位置,再抓取下一个货物。这种方式广泛运用于如码头集装箱的吊装作业中。其原因主要是集装箱货物重量较大,起吊设备的起吊能力有限,安全起见一次只能起吊一次设备。但是在一些自重较轻,数量较多的货物搬运场景中,这种逐一抓取搬运的模式就不能充分使用吊车的起吊能力,导致搬运效率较低。尤其是将货物搬运到货柜架上,由于货柜架是规则整齐的,而货物本身是不整齐的,导致一次将多个货物放置到货柜架上。
发明内容
有鉴于此,有必要提供一种三重调位门式起重机,用以解决现有技术中对于轻质货物搬运到货柜架上效率较低的技术问题。
本发明提供一种三重调位门式起重机,该三重调位门式起重机包括:运动机构、主体部、第一横向位移机构以及夹取模块,主体部设置于运动机构上,运动机构能够带动主体部运动,至少一个第一横向位移机构设置于主体部上,并与夹取模块一一对应传动连接,用于改变夹取模块的横向位置,夹取模块包括竖向位移机构、第二横向位移机构以及夹持部,竖向位移机构与第一横向位移机构连接,竖向位移机构的动力输出端与至少一个第二横向位移机构传动连接,第二横向位移机构的动力输出端一一对应地传动连接夹持部,用于改变夹持部的横向位置。
进一步的,第一横向位移机构与第二横向位移机构运动方向平行。
进一步的,运动机构包括轨道、车轮以及动力电机,至少两根轨道平行间隔设置,车轮与主体部连接并且与轨道配合连接,动力电机与车轮传动连接,驱动车轮沿轨道滚动。
进一步的,主体部包括至少一根横梁,横梁垂直于轨道,第一横向位移机构一一对应地设置于横梁上。
进一步的,第一横向位移机构包括第一横向电机、第一丝杆以及第一螺母,第一横向电机设置于横梁上,第一丝杆一端与第一横向电机的传动轴同轴固定连接,另一端穿过第一螺母并与第一螺母啮合连接,第一螺母与竖直位移机构固定连接。
进一步的,第一横向位移机构还包括滑板以及与滑板连接的滚轮,横杆上开设有滑槽,滚轮与滑槽配合滑动连接,第一螺母固定连接在滑板上,竖直位移机构与滑板固定连接,第一横向电机能够通过第一丝杆以及第一螺母驱动滑板沿滑槽运动。
进一步的,夹取模块还包括横板以及导向杆,导向杆竖直设置,其上端与横梁固定连接,横板平行设置于横梁下方并与导向杆滑动连接,竖直位移机构与横板传动连接,第二横向位移机构设置于横板上并与夹持部传动连接。
进一步的,竖直位移机构为电动推杆,其固定端与滑板下表面固定连接,其动力输出端竖直朝下,与横板传动连接。
进一步的,第二横向位移机构包括第二横向电机、第二丝杆以及第二螺母,第一横向电机设置于横板上,第二丝杆一端与第二横向电机的传动轴同轴固定连接,另一端穿过第二螺母并与第二螺母啮合连接,第二螺母与夹持部固定连接。
进一步的,第二丝杆为双向丝杆,夹取模块包括三个并排设置的夹持部,其中中间的夹持部与横板固定连接,两侧的夹持部通过第二螺母与双向丝杆两端分别啮合连接,第二横向电机转动时,两侧的夹持部能够同时向中间的夹持部靠拢或远离。
与现有技术相比,本三重调位门式起重机能够通过第一横向位移机构来调整各个夹取模块之间的横向相对位置,通过竖向位移机构来调整不同夹持模块的夹持部的纵向相对位置,还可以通过第二横向位移机构来调整一个夹取模块内的不同夹持部的横向相对位置,通过这三种调整方式,能够将各个夹持部调整到合适的位置上,将多个货物同时放置到对应的货柜中,有效地提高了搬运效率。
附图说明
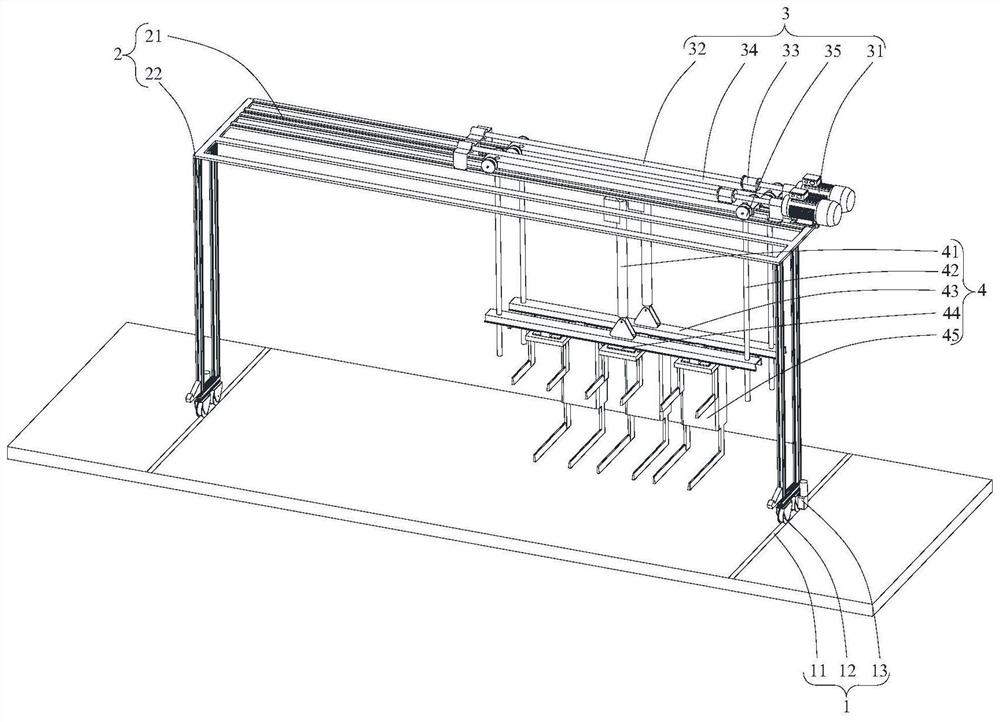
图1为本发明提供的三重调位门式起重机的结构示意图;
图2为图1中第二横向位移机构的结构示意图。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本申请一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
请参见图1,本三重调位门式起重机包括运动机构1、主体部2、第一横向位移机构3以及夹取模块4。
其中,在本实施例中,运动机构1采用轨道系统,包括轨道11、车轮12以及动力电机13。至少两根轨道11平行间隔设置,车轮12与轨道11配合连接,能够沿轨道11滚动。动力电机13与车轮12传动连接,能够驱动车轮12沿轨道11前后滚动。
主体部2一般采用框架结构,包括横梁21和竖杆22,多根横梁21平行间隔设置并且追至于轨道11,横杆21的两端分别与竖杆22固定连接,竖杆22的下端与车轮12一一对应连接,车轮12承载着主体部2,带动主体部2沿轨道11运动。
第一横向位移机构3一一对应地设置在横梁21上,包括第一横向电机31、第一丝杆32、第一螺母33、滑板34以及滚轮35。沿横杆21上开设有滑槽,第一横向电机31固定设置于横梁21上,第一丝杆32与横杆21平行设置,一端与第一横向电机31的传动轴同轴固定连接,另一端穿过第一螺母33并与第一螺母33啮合连接。第一螺母33与滑板34固定连接,滚轮35与滑板34连接,滚轮35与滑槽配合连接,能够沿滑槽滚动。当第一横向电机31带动丝杆32转动时,第一螺母33由于沿周向方向的转动受到限制,因此会沿轴向与第一丝杆33发生相对运动,从而带动滑板34沿滑槽前后运动,运动方向根据第一横向电机31的转动方向确定。
夹取模块4包括竖向位移机构41、导向杆42、横板43、第二横向位移机构44以及夹持部45。竖向位移机构41竖直设置,其固定端与滑板34固定连接,其动力输出端与横板43固定连接,能够带动横板43上下移动。为了辅助横板43上下移动,在横板43的两端还分别竖直设置有两根导向杆42,导向杆42上端与横杆21固定连接,下端穿过横板43,横板43能够在竖向位移机构41的带动下沿导向杆42移动。在本实施例中,竖向位移机构41采用电动推杆,横板43平行于横梁21设置。
第二横向位移机构44与第一横向电机31平行并固定设置在横板43上,第二横向位移机构44还与夹持部45传动连接,能够带动夹持部45横向运动。在本实施例中,与第一横向位移机构3相似的,第二横向位移机构44也可以采用丝杆螺母机构,包括第二横向电机441、第二丝杆442以及第二螺母443。第一横向电机441固定设置于横板43上,第二丝杆442一端与第二横向电机441的传动轴同轴固定连接,另一端穿过第二螺母443并与第二螺母443啮合连接,第二螺母443与夹持部45固定连接。夹持部45的具体形状可以根据所搬运的物体来确定,以方便拾取和放置货物为准。
在本实施例中,一个夹取模块4上并排设置有3个夹持部45,其中中间的夹持部45与横板43固定连接,第二丝杆442采用双向丝杆,两侧的旋向相反。两侧的夹持部45通过第二螺母443与双向丝杆两端分别啮合连接。当第二横向电机441转动时,两侧的夹持部45能够同时向中间的夹持部45靠拢或远离。
在使用本三重调位门式起重机时,先存在一个货物暂存区域,该区域用于将运输来的货物临时堆放,并铺设轨道11来连通该货物暂存区域与放置货架。然后根据货物需要被放置在货架上的位置来确定由哪一个夹持部45拾取该货物。通过动力电机13驱动车轮12转动来沿轨道11运动,第一横向位移机构3带动夹取模块4沿横梁21整体运动,竖向位移机构41带动横板43移动至合适的高度,第二横向位移机构44带动各个夹持部45沿横板43移动到合适的位置从而拾取货物。当所有的夹持部45都拾取到货物之后,第一横向位移机构3带动夹取模块4沿横梁21整体运动,竖向位移机构41带动横板43移动至合适的高度,第二横向位移机构44带动各个夹持部45沿横板43移动到合适的位置,使得不同的夹取模块4上的夹持部45位于不同的高度,各个夹持部45相距一定的间隔,对准各自放入的货架。然后在动力电机13驱动下,车轮12沿轨道1滚动,将夹持部45上的货物一起放入到对应的货架上。通过这样一次拾取并放置多个货物,就能大大提高货物的分类归集的效率。
实施本发明实施例,具有如下有益效果:本三重调位门式起重机能够通过第一横向位移机构来调整各个夹取模块之间的横向相对位置,通过竖向位移机构来调整不同夹持模块的夹持部的纵向相对位置,还可以通过第二横向位移机构来调整一个夹取模块内的不同夹持部的横向相对位置,通过这三种调整方式,能够将各个夹持部调整到合适的位置上,将多个货物同时放置到对应的货柜中,有效地提高了搬运效率。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 一种三重调位门式起重机
- 一种带有轨道式门式起重机锚定系统的门式起重机